Изобретение предназначено для получения поступательного движения транспортных средств (ТС) и может быть применено в различных устройствах для перемещения различных объектов.
Известен способ образования движущей волны для перемещения ТС, реализованный в устройстве, в котором движущая волна получается путем поочередного подъема участков опорной поверхности за счет тяговых цепей со встроенными в них каретками (патент РФ №2070524, МПК В62D 57/00, «Волновой движитель транспортного средства (ТС)», опубл. 20.12.96 г., БИ №35).
Недостаток известного способа заключается в том, что конструкция механизма передвижения в известном способе содержит большое количество узлов, в частности цепей, роликов, катков, звездочек и т.д. Известный механизм сложен в производстве и ненадежен в эксплуатации.
Более близким по технической сущности и принятым за прототип является способ образования движущей волны для перемещения ТС, описанный в патенте РФ №2110432, МПК B62D 57/00, F03G 3/00, «Способ получения инерционного движения и устройство для его реализации», опубл. 10.05.1998 г., Бюл. №13.
В известном способе создается постоянно направленная вдоль оси ТС волна гармонических знакопеременных сил, действующих в продольном по ходу движения направлении и сдвинутых по фазе и в пространстве.
В этом способе применен более совершенный механизм передачи воздействующей силы на опору.
Однако известному способу также присущи недостатки, заключающиеся в том, что движущие силы не связаны к опорной поверхностью. Это приводит к низкой эффективности воздействия механизма на поверхность дороги.
Заявляемое изобретение направлено на повышение тяговой силы механизма перемещения, увеличение КПД привода, повышение надежности и упрощение кинематической передачи.
Для достижения указанного результата в известном способе образования движущей волны для перемещения транспортного средства, создаваемой за счет постоянно направленных знакопеременных гармонических сил, действующих в продольном по ходу движения направлении и сдвинутых по фазе и в пространстве, согласно изобретению между внутренними участками опорной поверхности транспортного средства образуют не менее двух пар точек приложения сил, располагают эти точки на расстоянии L друг от друга, причем угол сдвига фаз указанных гармонических сил делают равным
φi=180°L(1-i)/τ,
где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя соседними точками, угол сдвига φ приложения сил между которыми составляет 180; f - частота колебаний гармонических сил; i - порядковый номер точки приложения силы, отсчитываемый по ходу движения волны; n - число пар точек приложения сил; V - заданная скорость движения волны.
В варианте технического решения при необходимости направление движущей волны обращают в обратную сторону за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный.
Процесс получения движущей волны за счет образования между внутренними участками опорной поверхности ТС не менее двух пар точек приложения сил, расположение этих точек на расстоянии L друг от друга и формирование угла сдвига фаз между гармоническими силами, равное
φi = 180°×L(1-i)/τ,
где L=τ/n - расстояние между двумя соседними точками приложения сил, м; τ=V/2f - полюсное деление; f частота колебаний гармонических сил; i - порядковый номер точки приложения силы, отсчитываемый по ходу движения волны; n - число пар точек приложения сил; V - заданная скорость движения волны, позволяет создать однонаправленную и постоянную во времени движущую силу, направленную вдоль оси ТС и приводящую его в движение. При этом снижается вибрация на механизм передвижения, повышается КПД, устраняется необходимость в конструировании сложной кинематической передачи движения на опору, что повышает надежность системы и улучшает регулировочные свойства привода.
Изменение направления движущей волны в обратную сторону за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180° на противоположный, позволяет относительно просто обеспечивать реверс ТС.
Заявленное изобретение иллюстрируется чертежами.
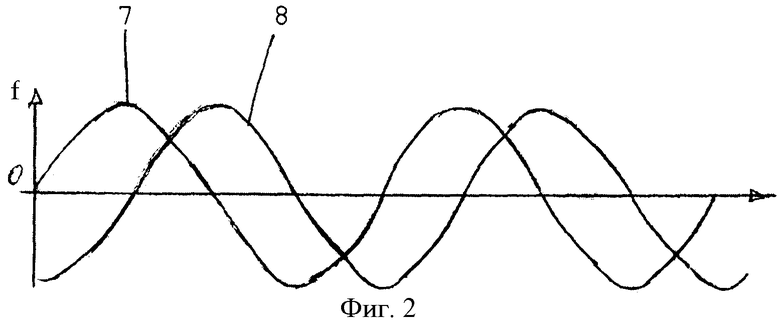
На фиг.1 представлена конструкция устройства для получения движущей волны, в которой число пар гармонических сил равно двум.
На фиг.2 представлена диаграмма гармонических сил с двумя парами точек приложения сил.
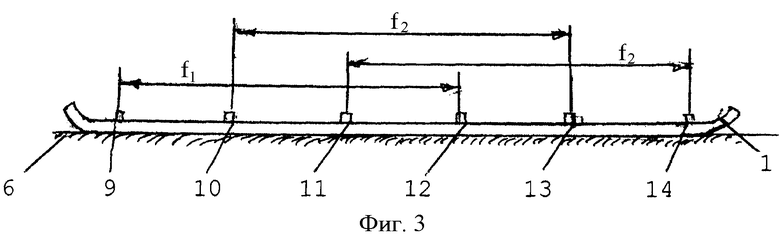
На фиг.3 показана конструкция для получения движущей волны ТС с тремя парами точек приложения сил.
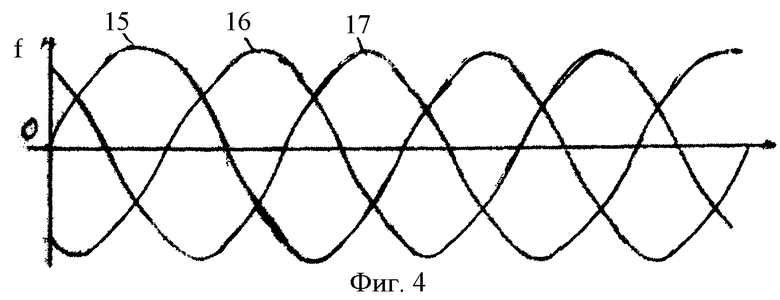
На фиг.4 показана диаграмма гармонических сил с тремя парами точек приложения сил.
Устройство образования движущей волны для перемещения ТС выполнено следующим образом. Между внутренними участками опорной поверхности 1 (фиг.1), выполненной из гибкого эластичного материала, выполнены четыре выступа 2-5, которые являются точками приложения для знакопеременных гармонических сил. Выступы жестко сочленены с опорной поверхностью. Выступы располагают на равном расстоянии L друг от друга. Между выступами создают знакопеременные гармонические силы. Причем угол φ сдвига фаз гармонических сил, привязанный к конкретной точке, равен φi = 180°×L(1-i)/τ, градус, где τ=V/2f - полюсное деление, м; f - частота колебаний гармонических сил, Гц; i - порядковый номер точки приложения силы, отсчитываемый по ходу движения волны; n - число пар точек приложения сил; V - заданная скорость движения волны, м/с. Полюсное деление τ - это расстояние между двумя точками, угол сдвига φ приложения сил между которыми составляет 180°. Общее число пар точек должно быть кратным двум. Опорная поверхность 1 располагается на дорожном покрытии 6,
По существу к парам точек 2-4 и 3-5 приложены гармонические силы, стремящиеся сжать или растянуть опорную поверхность. График этих сил fi в зависимости от ωt, изображенный на фиг.2, представляет собой две синусоиды 7 и 8, сдвинутые по отношению друг к другу на 90°, где ω=2πf, t - время. Для данной конструкции число точек может быть увеличено пропорционально четырем. Например, общее число точек приложения сил может равняться восьми или двенадцати. При этом углы сдвига фаз будут повторяться.
В одном из вариантов конструкции на внутренней стороне опорной поверхности выполнено шесть выступов, соответственно 9, 10, 11, 12, 13 и 14 (фиг.3). Эти выступы также являются точками приложения знакопеременных гармонических сил. Графики эти сил (фиг.4) представляют собой три синусоиды, сдвинутые на 120°, соответственно 15, 16 и 17. При этом пары знакопеременных гармонических сил приложены к выступам соответственно 9-12, 11-14 и 10-13, а угол φ сдвига фаз гармонических сил, привязанный к конкретной точке, также равен φi = 180°×L(1-i)/τ. Количество точек в трехфазной системе может быть также увеличено кратно шести с повторением углов сдвигов фаз.
Теоретически в представленных согласно чертежам конструкциях применены двухфазная (фиг.1, 2) и трехфазная колебательные системы (фиг.3, 4).
Как известно, m-фазная система есть совокупность m колебательных процессов, в каждой из которых действуют периодические колебания одной и той же частоты и сдвинутые относительно друг друга на один и тот же угол φ0. В частности, в первом варианте, где использована 2-фазная система и φ0 = 90°, а во втором варианте имеет место 3-фазная система и φ0 = 120°. Очевидно, что количество фаз может быть увеличено.
Среднее расстояние Lср между точками определяется из соотношения Lср=τ/m. При этом суммарная длина LΣ будет равна LΣ=(n-1)Lср.
Способ образования движущей волны для перемещения ТС реализуется следующим образом.
В качестве генератора знакопеременных гармонических сил может быть применен любой привод: гидравлический, пневматический, механический и т.д. При воздействии гармонических сил на точки приложения формируется повторяющаяся однонаправленная бегущая волна сжатий и растяжений, действующих на опорную поверхность 1. Соответственно на дорожном покрытии 6 появляется обратная реакция, противодействующая этим бегущим волнам. В результате взаимодействия опорной поверхности и дорожного покрытия формируется результирующая сила, движущая ТС в сторону, противоположную движению бегущей волны.
Как известно, для получения поступательного движения необходим сдвиг движущих сил в пространстве и во времени, что и реализовано в данном изобретении.
Этот процесс по своей физической сущности напоминает явления, происходящие в асинхронном линейном электродвигателе, в котором бегущая электромагнитная волна приводит в поступательное движение вторичное тело.
Для изменения направления движущей волны достаточно в обоих представленных в двухфазном и в трехфазном вариантах изменить угол сдвига фаз одной из пар гармонических сил, сдвинутых на 180°, на противоположный.
В частности, для механической системы, представленной на фиг.1, меняют угол сдвига на противоположный для сил, приложенных к точкам 2-4 или 3-5. Для механической схемы, представленной на фиг.2, меняют угол сдвига на противоположный для пар точек либо 9-12, либо для точек 10-13, либо для точек 11-14.
Для получения тормозного эффекта необходимо либо по указанному выше принципу осуществить реверс системы, либо остановить привод. Впрочем особенность данного привода состоит в том, что торможение можно производить плавным изменением частоты колебаний движущих сил. Поскольку контакт между дорожной поверхностью и опорной поверхностью ТС образуется за счет трения поверхностей, то остановка ТС происходит очень быстро при выключении приводного механизма.
Регулировать скорость V перемещения ТС можно путем изменения частоты f колебаний знакопеременных гармонических сил.
Пример применения. Для транспортного средства требуется получить скорость движения V=50 км/час (14 м/с). Для упрощения конструкции принимаем устройство для получения движущей волны с числом пар точек n=2 (фиг.1, 2).
Полюсное деление принимаем равным τ=1 м. Из формулы V=2fτ получаем, что частота возвратно-колебательных гармонических сил, прикладываемых к опорным точкам, должна равняться f=7 Гц.
Среднее расстояние Lср между точками определяется из соотношения Lср=τ/m=1/2=0,5. Суммарная длина LΣ=(4-1) Lср=3×0,5=1,5 м.
Технико-экономические достоинства способа образования движущей волны для перемещения транспортного средства заключаются в следующем:
1. Упрощен механизм передачи движения на опорную поверхность ТС.
2. Повышены проходимость системы и нагрузка на дорогу, поскольку для обеспечения движения может быть использована вся опорная поверхность ТС.
3. Повышена устойчивость ТС, поскольку его центр тяжести приближен к дороге.
4. Более высокая надежность, поскольку сложные трансмиссии в системе исключены.
Изобретение относится к способу образования движущей волны для поступательного движения транспортных средств. Способ заключается в создании движущей волны за счет постоянно направленных знакопеременных гармонических сил, действующих в продольном по ходу движения направлении волны и сдвинутых по фазе и в пространстве. Между внутренними участками опорной поверхности транспортного средства образуют не менее двух пар точек приложения сил и располагают эти точки на расстоянии L друг от друга. Угол сдвига фаз указанных гармонических сил принимают равным φi=180°×L(l-i)/i, где L=τ/n; φi=V/2f - полюсное деление, т.е. расстояние между двумя точками приложения сил, угол сдвига φ между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер точки приложения силы, отсчитываемый по ходу движения волны; n - число пар точек приложения сил; V - заданная скорость движения волны. Достигаются повышение тяговой силы механизма перемещения, увеличение КПД привода, повышение надежности и упрощение кинематической передачи. 1 з.п. ф-лы, 4 ил.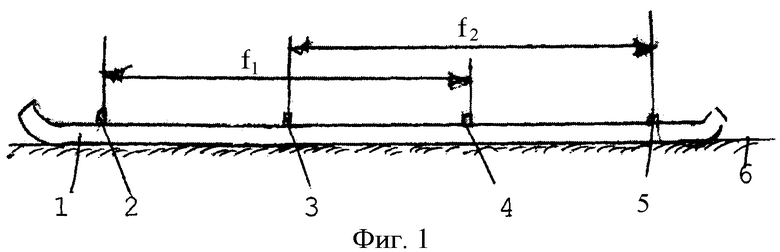
1. Способ образования движущей волны для перемещения транспортного средства, создаваемой за счет постоянно направленных знакопеременных гармонических сил, действующих в продольном по ходу движения направлении волны и сдвинутых по фазе и в пространстве, отличающийся тем, что между внутренними участками опорной поверхности транспортного средства образуют не менее двух пар точек приложения сил и располагают эти точки на расстоянии L друг от друга, причем угол сдвига фаз указанных гармонических сил принимают равным φi=180°·L(l-i)/τ, где L=τ/n, τ=V/2f - полюсное деление, т.е. расстояние между двумя точками приложения сил, угол сдвига φ между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер точки приложения силы, отсчитываемый по ходу движения волны; n - число пар точек приложения сил; V - заданная скорость движения волны.
2. Способ образования движущей волны по п.1, отличающийся тем, что при необходимости направление движущей волны обращают в обратную сторону за счет изменения угла сдвига фаз одной из пар сдвинутых между собой на 180° гармонических сил на противоположный.
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ УСТРОЙСТВА | 2005 |
|
RU2293037C1 |
| WO 8910484 А1, 02.11.1989 | |||
| RU 2070524 С1, 20.12.1996 | |||
| US 2001035059 А1, 01.11.2001. | |||

