Изобретение относится к транспортному машиностроению, может быть использовано в колесных транспортных средствах (ТС) и предназначено для получения поступательного движения в различных устройствах для перемещения пассажиров и грузов.
Широко известны способы получения поступательного движения в колесных ТС, в которых постоянно направленное вдоль оси усилие создается за счет вращательного момента, подаваемого на ведущие колеса от силовой установки через трансмиссию. См., например, БТР-60, нашедшее применение в некоторых армиях.
Недостаток известного способа получения поступательного движения заключается в том, что в случае попадания ТС на песок, в болото или на другие сложные грунты ведущие колеса начинают буксовать. В результате чего экипаж теряет подвижность и вязнет.
Известен также способ получения поступательного движения, аналогичный описанному ранее, но в котором оси колес расположены ниже обреза нижней части корпуса. (См., например, патент РФ №2042560, МПК В62 62/00 "Колесное транспортное средство", опубл. 27.08.1995 г. в БИ №24.) В нем также перемещение производится путем подачи крутящего момента на фиксированное число колесных пар.
Недостатки данного способа такие же, как и у всех ТС с таким способом перемещения, т.е. они вязнут в сложных грунтах и не способны перемещаться по воде или болоту без специальных приспособлений.
Более близким по технической сущности и принятым за прототип является способ получения поступательного перемещения ТС, реализованный в устройстве, описанном в патенте РФ №2042560, МПК B62D 61/00 «Волновой движитель транспортного средства», опубл. 20.12.96 г. в БИ №35). В известном способе формируются волны движущих сил, получаемые путем поочередного подъема участков опорной поверхности.
Недостаток известного способа заключается в том, что при его реализации конструкция механизма передвижения содержит большое количество узлов, в частности цепей, роликов, катков, звездочек и т.д. Известный механизм сложен в производстве, развивает невысокое тяговое усилие, надежен в эксплуатации и имеет низкий КПД.
Заявляемое изобретение направлено на повышение тяговой силы механизма перемещения, увеличение КПД привода, повышение надежности, упрощение кинематической передачи и повышение проходимости.
Для достижения указанного результата в известном способе образования волн движущих сил в колесном транспортном средстве, согласно изобретению, формируют не менее четырех колесных пар, располагают их на расстоянии L друг от друга, волны движущих сил образуют путем воздействия на колесные пары знакопеременными гармоническими силами, действующими в продольном по ходу движения транспортного средства направлении и сдвинутыми по фазе и в пространстве, причем угол сдвига фаз указанных гармонических сил делают равным φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя колесными парами, угол сдвига φ приложения сил между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число пар колесных пар; V - заданная скорость движения волны.
В варианте технического решения направление движущей волны обращают в обратную сторону за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный угол.
В универсальном колесном вездеходе (УКВ), содержащем колесные пары с приводом от силовой установки, корпус и двигатель с системой управления, согласно изобретению вездеход содержит не менее четырех колесных пар, размещенных на равном расстоянии L друг от друга, колесные пары сочленены с нижними краями плоских вертикальных жестких стоек, которые с помощью цилиндрических шарниров, делящих плоские стойки на два плеча, соединены с общими жесткими продольными балками, проходящими с двух сторон от стоек, верхние края стоек через шарниры сочленены с приводом, обеспечивающим знакопеременное возвратно-поступательное гармоническое движение х по закону х=Xm×sin(ωt-φi), где Xm - амплитудное значение поступательного движения, причем корпус подвижного объекта сочленен с продольными балками с помощью рессор, а передняя колесная пара снабжена рулем управления, поворачивающим ее ось.
В варианте технического решения привод колесных пар выполнен индивидуальным и состоит из гидроцилиндров, расположенных по оси, вдоль горизонтальной поверхности и приводимых в возвратно-поступательное движение от гидронасоса через золотники и гидроусилители с системой управления, а торцевые стороны (основания) цилиндров шарнирно сочленены с поперечными стержнями, концы которых жестко сочленены с картером, жестко сочлененным с продольными балками, при этом штоки гидроцилиндров шарнирно сочленены с поперечинами жестких стоек.
В варианте технического решения привод колесных пар сочленен с общим валом, имеющим механическую связь с общим двигателем.
Процесс перемещения ТС путем образования не менее четырех колесных пар, которые располагают на расстоянии L друг от друга, а волны движущих сил образуют путем воздействия на колесные пары знакопеременными гармоническими силами, действующими в продольном по ходу движения транспортного средства направлении и сдвинутыми по фазе и в пространстве, с уголом сдвига фаз указанных гармонических сил, равным φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя колесными парами, угол сдвига φ приложения сил между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число пар колесных пар; V - заданная скорость движения волны, позволяет создать постоянную во времени движущую силу, однонаправленную вдоль оси ТС и приводящую его в движение. При этом снижается вибрация на механизм передвижения, повышается КПД и увеличивается проходимость.
Изменение направление движущей волны за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный угол позволяет относительно просто обеспечивать реверс ТС.
В универсальном колесном вездеходе, содержащем колесных пары с нижними краями плоских вертикальных жестких стоек, которые с помощью цилиндрических шарниров, делящих плоские стойки на два плеча, соединены с общими жесткими продольными балками, проходящими с двух сторон от стоек, а верхние края стоек через шарниры сочленены с приводом, обеспечивающим знакопеременное возвратно-поступательное гармоническое движение х по закону х=Xm×sin(ωt-φi), дает возможность обеспечить привод на каждую колесную пару в отдельности.
Наличие опорной поверхности выполненной в виде не менее четырех колесных пар, оси которых размещены на равном расстоянии L друг от друга и к осям которых приложены гармонические силы, позволяет формировать поступательное движение универсального вездехода практически на любой поверхности, в том числе на воде.
Сочленение корпуса подвижного объекта с продольными балками с помощью рессор устраняет или, по крайней мере, смягчает воздействие неровностей дороги на экипаж.
Наличие рулевого управления на передней колесной паре, поворачивающего ее ось, обеспечивает управляемость универсального вездехода.
Применение индивидуального привода в виде гидроцилиндров, расположенных по оси, вдоль горизонтальной поверхности и приводимых в возвратно-поступательное движение от гидронасоса через золотники и гидроусилители с системой управления обеспечивает хорошую управляемость вездехода.
Применение привода в виде механической связи каждой оси с общим валом, приводимым в движение от общего двигателя, позволяет упростить систему привода.
В предлагаемом способе получения движущей силы и устройстве ТС устраняется необходимость в конструировании сложной кинематической передачи движения на колеса, что повышает надежность системы и улучшает регулировочные свойства привода.
Заявленное изобретение иллюстрируется чертежами.
На фиг.1 представлена конструкция УКВ с шестью колесными парами, приводимыми в движение от гидроцилиндров (вид сбоку).
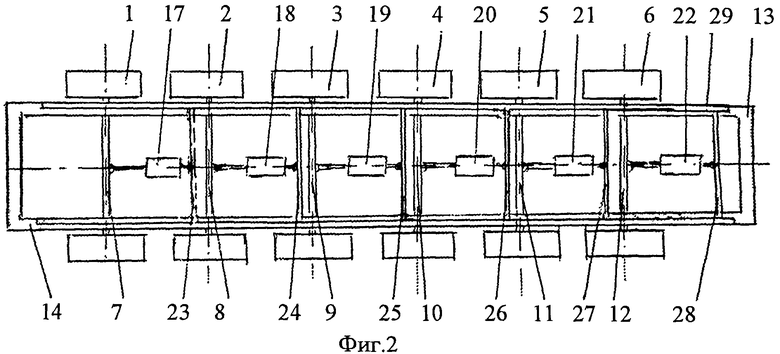
На фиг.2 представлена вторая проекция УКВ, вид в плане.
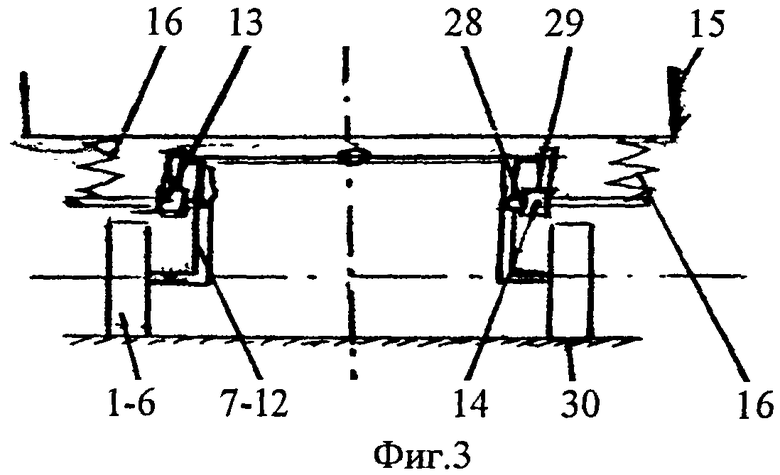
На фиг.3 показан вездеход при виде с торца.
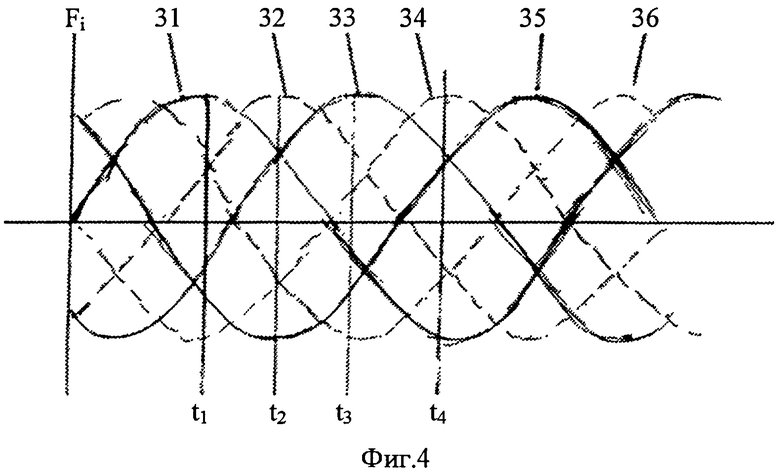
На фиг.4 имеется график знакопеременных сил Fi, приложенных к шести колесным парам соответственно, к 1-й, 2-й, 3-й, 4-й, 5-й и 6-й со сдвигом на 60°.
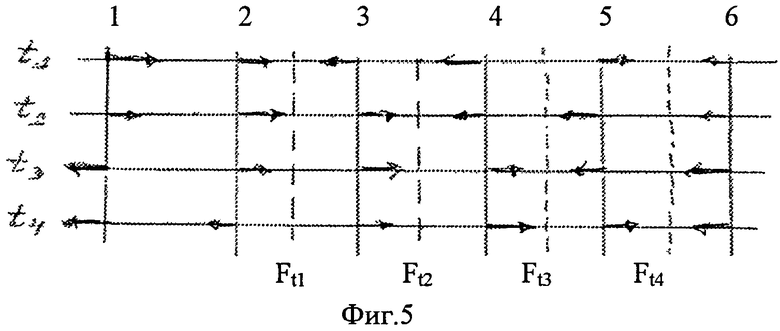
На фиг.5 изображено распределение сил Fi, приходящееся на колесную пару в соответствии с фиг.4.
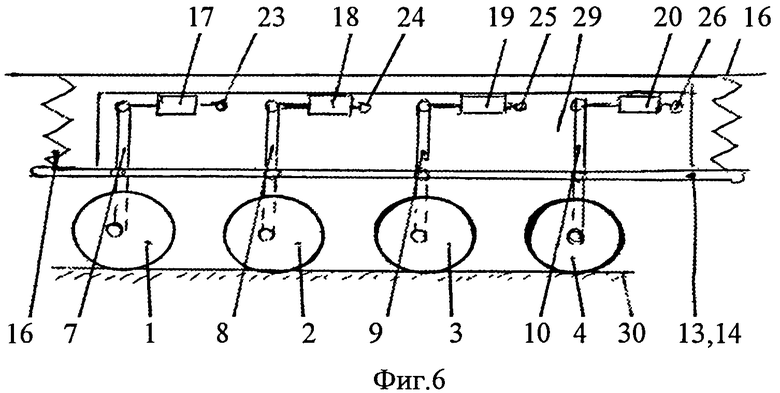
На фиг.6 представлена принципиальная конструкция УКВ с четырьмя колесными парами.
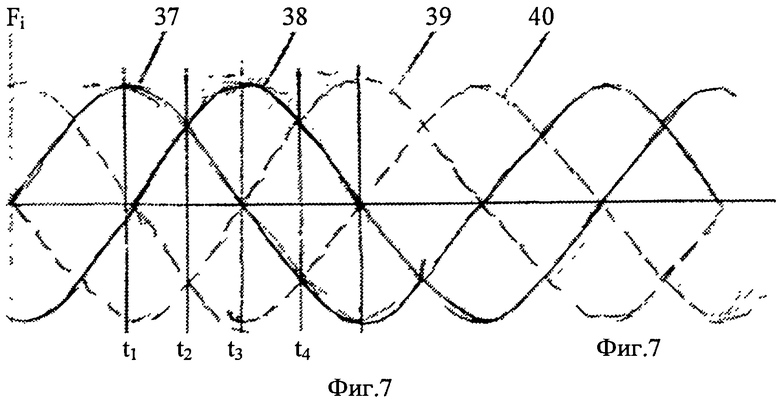
На фиг.7 имеется график знакопеременных сил f, приложенных к четырем колесным парам соответственно, к 1-й, 2-й, 3-й, 4-й со сдвигом на 90°.
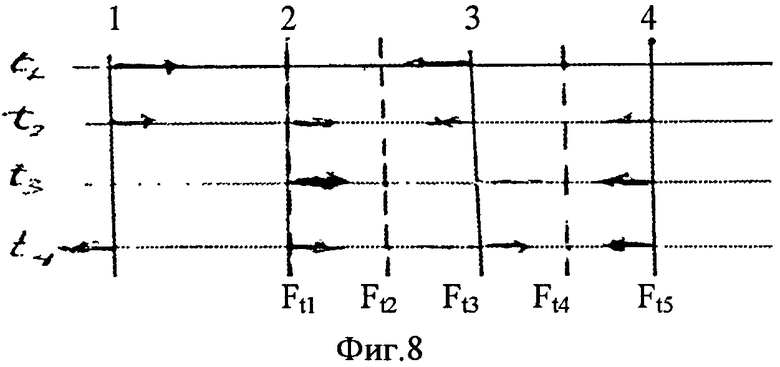
Фиг.8 изображает силы, приходящиеся на колесные пары в соответствии со временем, указанным на фиг.7.
Универсальный колесный вездеход устроен следующим образом. Опорная поверхность выполнена в виде шести колесных пар 1, 2, 3, 4, 5 и 6 (фиг.1, 2, 3). Общее их число должно быть не менее четырех. Оси этих пар размещены на равном расстоянии L друг от друга. К осям колесных пар приложены гармонические силы, угол сдвига фаз которых равен φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя осями колесных пар, угол сдвига φ приложения сил между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число колесных пар; V - заданная скорость движения волны. Для данного варианта исполнения (фиг.1-3) угол сдвига сил составляет 60°. Колесные пары сочленены с нижними краями плоских вертикальных П-образных жестких стоек, соответственно 7-12. Эти стойки с помощью цилиндрических шарниров, делящих плоские стойки на два плеча, соединены с общими жесткими продольными балками 13, 14, расположенными с двух сторон от стоек. Верхние поперечины стоек 7-12 через шарниры сочленены с приводом, обеспечивающим знакопеременное возвратно-поступательное, гармоническое движение х по закону х=Xm×sin(ωt-φi), где Xm - амплитуда движения стойки. Корпус 15 подвижного объекта сочленен с продольными балками 13, 14 с помощью рессор 16. Передняя колесная пара снабжена рулем управления с гибким промежуточным валом (не показан), поворачивающим ее ось.
В варианте технического решения, верхние поперечины стоек 9-14 снабжены индивидуальным приводом колесных пар, состоящим из гидроцилиндров 17-22, расположенных по продольной оси вездехода вдоль его горизонтальной поверхности следующим образом: шток гидроцилиндра 17 сочленен со стойкой 7; шток цилиндра 18 сочленен со стойкой 8; шток цилиндра 19 сочленен со стойкой 9; шток цилиндра 20 сочленен со стойкой 10; шток цилиндра 21 сочленен со стойкой 11; шток цилиндра 22 сочленен со стойкой 12. Штоки гидроцилиндров приводятся в возвратно-поступательное движение от гидронасоса через золотники и гидроусилители с системой управления (не показано). Торцевые стороны (основания) гидроцилиндров шарнирно сочленены с поперечными стержнями 23-28. Концы стержней жестко сочленены с картером 29. Последний жестко сочленен с продольными балками 13, 14. Вездеход перемещается по поверхности 30.
В варианте технического решения привод колесных пар сочленен с общим валом, имеющим механическую связь с общим двигателем (не показан). Привод к отдельным колесным парам может быть выполнен, например, на основе кривошипно-шатунных механизмов.
Гармонические знакопеременные силы изображены в виде синусоид F=f(ωt-φi) на фиг.4. Положительная полуволна соответствует движению стойки вправо, а отрицательная волна - влево. Графики соответствующих сил, приложенных к стойкам, а через них к колесным парам, обозначены следующим образом: 31 - к стойке колесной пары 1; 32 - к стойке колесной пары 2; 33 - к стойке колесной пары 3; 34 - к стойке колесной пары 4; 35 - к стойке колесной пары 5 и 36 - к стойке колесной пары 6. На фиг.5 выделены для примера моменты времени t1, t2, t3, t4. Как видно из фиг.4, сдвиг по фазе действующих сил, приложенных к колесным парам, равен φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя осями колесных пар, угол сдвига φ приложения сил между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число колесных пар; V - заданная скорость движения волны. Для данной системы с шестью парами колес φ1=0°, φ2=-60°, φ3=-120°, φ4=-180°, φ5=-240°, φ6=-300°, т.е. с отставанием для каждой последующей пары на 60°.
Распределение сил Fi, приходящихся на колесные пары в соответствии со временем, указанным на фиг.4, показаны на фиг.5. Там же показаны результирующие силы Fti, соответствующие тому или иному моменту времени.
На фиг.6 представлена принципиальная конструкция УВ с четырьмя колесными парами. При этом общая конструкция и обозначение соответствующих элементов конструкции совпадает с фиг.1-3.
Гармонические знакопеременные силы изображены в виде синусоид для четырехколесного вездехода F=f(ωt-φi) и представлены на фиг.7. Графики соответствующих сил, приложенные к колесным парам, обозначены следующим образом: 37 - к стойке колесной пары 1; 38 - к стойке колесной пары 2; 39 - к стойке колесной пары 3; 40 - к колесной паре 4.
На фиг.7 выделены моменты времени t1, t2, t3, t4. Сдвиг по фазе между силами равен φi=180°L(1-i)/τ.
Для данной системы с четырьмя парами колес угол сдвига сил, действующих на оси, равен φ1=0°, φ2=-90°, φ3=-180°, φ4=-270°, т.е. с отставанием для каждой последующей пары на 90°.
Распределение сил, приходящихся на колесные пары в соответствии со временем, указанным на фиг.7, показаны на фиг.8.
В варианте технического решения направление движущей волны обращают в обратную сторону за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный угол.
Универсальный колесный вездеход действует следующим образом. Через стойки 7-12 возвратно-поступательное движение передается на соответствующие колесные пары. По существу на колесные пары, углы сдвига фаз приложения сил к которым различаются на 180°, действуют взаимно противоположно направленные силы, стремящиеся сблизить или раздвинуть их оси. При этом все силы, приложенные к осям ТС, складываются, образуя суммарную силу Fti, воздействующую на поверхность дороги 30 и равномерно перемещающуюся вдоль нее. В самом деле, из графика фиг.5 видно, что на момент времени t1 результирующая сила Ft1 будет находиться в промежутке между осями 2 и 3 (фиг.6). В момент времени t2 результирующая сила f2 будет находиться в промежутке между осями 3 и 4. В момент времени t4 эта результирующая сила Ft3 будет приложена к поверхности в промежутке между колесными парами 4 и 5. В момент времени t4 эта сила Ft4 будет располагаться между осями 5 и 6. Рассматривая весь интервал времени, можно убедиться, что результирующая сила будет последовательно и равномерно перемещаться в одну сторону вдоль поверхности последовательными повторяющимися волнами. Скорость перемещения V силовой волны равна V=2fr. По принципу действия аналогом данного способа движения является линейный асинхронный двигатель. На дорожном покрытии 30 возникнет обратная реакция, противодействующая этим бегущим волнам. В результате взаимодействия колесных пар 1-6 и дорожного покрытия 30 формируется сила, двигающая ТС в сторону, противоположную движению бегущих волн. Характер волн и их величина будет определяться ходом поршней и соотношением плеч плоских стоек 2-7, разделенных шарнирами, а скорость перемещения - частотой колебаний штоков.
Аналогично будет работать и четырехосный вездеход.
Изменение направление движущей волны за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный угол.
Представленный УКВ способен перемещаться по любому бездорожью по слякоти и грязи, поскольку центр приложения сил к поверхности постоянно перемещается. Более того, он способен передвигаться по болоту и даже по воде, если обладает некоторой плавучестью.
Дополнительными достоинствами данного УКВ являются повышение тяговой силы механизма перемещения, увеличение КПД привода, повышение надежности и упрощение кинематической схемы передачи движения от двигателя на колесные пары и возможность торможения методом противовключения при движении под уклон.
Высокой проходимости способствует также большой дорожный просвет.
Пример применения: для УКВ с шестью колесными парами требуется получить скорость движения V=50 км/час (14 м/с). Полюсное деление, т.е. расстояние между осями колесных пар, принимаем равным τ=1,5 м. Из формулы V=2fτ получаем, что частота возвратно-колебательных гармонических сил, прикладываемых к опорным точкам, должна равняться f=4,7 Гц. При этом частота перемещения штоков в цилиндрах будет соответствовать той частоте 4,7 Гц. Среднее расстоянием Lcp между осями колесных пар определяется из соотношения Lcp=τ/m=1,5/3=0,5, где m=3 - число фаз системы. Суммарная длина системы привода составит LΣ=0,5×5=2,5 м. При этом диаметр колес будет равен 35 см.
Технико-экономические достоинства УКВ с волновым движением колесных пар:
1. Упрощен механизм передачи движения на опорную поверхность ТС.
2. Повышена проходимость системы и нагрузка на дорогу, поскольку для обеспечения движения использована вся опорная поверхность УКВ.
3. Повышена надежность, поскольку трансмиссии в системе упрощены.
4. Повышен КПД установки.
5. Повышены тормозные свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЗОВАНИЯ ДВИЖУЩЕЙ ВОЛНЫ ДЛЯ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2397097C1 |
| ПРЯМОТОЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2477699C1 |
| СПОСОБ ПЕРЕНОСА ТЕПЛОВОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2306497C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2303183C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КОЛЕСНЫХ ПАР ЛОКОМОТИВНОЙ ТЕЛЕЖКИ В КРИВЫХ | 2005 |
|
RU2286900C1 |
| Способ и стенд для испытания подшипников буксовых узлов колесных пар | 2022 |
|
RU2810148C1 |
Изобретения относятся к способу образования волн движущих сил в колесном транспортном средстве и к универсальному колесному вездеходу. Способ заключается в формировании не менее четырех колесных пар, последовательно расположенных на расстоянии L друг от друга. Волны движущих сил образуют путем воздействия на колесные пары знакопеременными гармоническими силами, действующими в продольном по ходу движения транспортного средства направлении и сдвинутыми по фазе и в пространстве. Угол сдвига фаз указанных гармонических сил устанавливают равным φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя колесными парами, угол сдвига φ приложения сил между которыми составляет 180°; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число пар колесных пар; V - заданная скорость движения волны. Вездеход с волновым движением колесных пар содержит средства воздействия на колесные пары, корпус, двигатель с системой управления и не менее четырех колесных пар. Колесные пары сочленены с нижними краями плоских вертикальных жестких стоек, которые с помощью цилиндрических шарниров, делящих плоские стойки на два плеча, соединены с общими жесткими продольными балками, проходящими с двух сторон от стоек. Верхние края стоек через шарниры сочленены с приводом, обеспечивающим знакопеременное возвратно-поступательное гармоническое движение х по закону x=Xm×sin(ωt-φi), где Хm - амплитудное значение поступательного движения. Корпус подвижного объекта сочленен с продольными балками с помощью рессор, а передняя колесная пара снабжена рулем управления, поворачивающим ее ось. Достигается повышение тяговой силы механизма перемещения, увеличение КПД привода, повышение надежности и упрощение кинематической схемы передачи движения от двигателя на опорную поверхность и повышение проходимости. 2 н. и 3 з.п. ф-лы, 8 ил.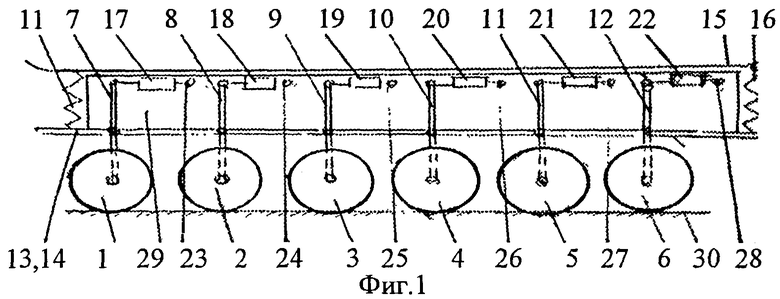
1. Способ образования волн движущих сил в колесном транспортном средстве, отличающийся тем, что формируют не менее четырех колесных пар, последовательно располагают их на расстоянии L друг от друга, волны движущих сил образуют путем воздействия на колесные пары знакопеременными гармоническими силами, действующими в продольном по ходу движения транспортного средства направлении и сдвинутыми по фазе и в пространстве, причем угол сдвига фаз указанных гармонических сил устанавливают равным φi=180°L(1-i)/τ, где L=τ/n; τ=V/2f - полюсное деление, т.е. расстояние между двумя колесными парами, угол сдвига φ приложения сил между которыми составляет 180; f - частота колебаний гармонических сил; i - порядковый номер колесной пары, отсчитываемый по ходу движения волны; n - число пар колесных пар; V - заданная скорость движения волны.
2. Способ по п.1, отличающийся тем, что направление движущей волны обращают в обратную сторону за счет изменения угла сдвига фаз одной из пар гармонических сил, сдвинутых между собой на 180°, на противоположный угол.
3. Универсальный колесный вездеход с волновым движением колесных пар, содержащий средства воздействия на колесные пары корпус и двигатель с системой управления, отличающийся тем, что вездеход содержит не менее четырех колесных пар, размещенных на равном расстоянии L друг от друга, колесные пары сочленены с нижними краями плоских вертикальных жестких стоек, которые с помощью цилиндрических шарниров, делящих плоские стойки на два плеча, соединены с общими жесткими продольными балками, проходящими с двух сторон от стоек, верхние края стоек через шарниры сочленены с приводом, обеспечивающим знакопеременное возвратно-поступательное гармоническое движение х по закону x=Xm·sin(ωt-φi), где Хm - амплитудное значение поступательного движения, причем корпус подвижного объекта сочленен с продольными балками с помощью рессор, а передняя колесная пара снабжена рулем управления, поворачивающим ее ось.
4. Универсальный колесный вездеход по п.3, отличающийся тем, что привод колесных пар выполнен индивидуальным и состоит из гидроцилиндров, расположенных по оси вдоль горизонтальной поверхности и приводимых в возвратно-поступательное движение от гидронасоса через золотники и гидроусилители с системой управления, а торцевые стороны (основания) цилиндров шарнирно сочленены с поперечными стержнями, концы которых жестко сочленены с картером, жестко сочлененным с продольными балками, при этом штоки гидроцилиндров шарнирно сочленены с поперечинами жестких стоек.
5. Универсальный колесный вездеход п.3, отличающийся тем, что привод колесных пар сочленен с общим валом, имеющим механическую связь с общим двигателем.
| RU 2070524 C1, 20.12.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |
| ВНЕДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2199463C2 |
| US 3354861 A, 28.11.1967 | |||
| JP 2009234534 A, 15.10.2009 | |||
| CN 101456433 A, 17.06.2009. | |||

