Изобретение относится к устройствам для передачи и преобразования движения и сил, в частности, к механизмам, преобразующим вращение кривошипа в сложное движение ползуна.
Известен реверсивный кривошипно-ползунный механизм, содержащий основание с направляющей, подвижно связанный с ней ползун, который соединен с шатуном, а также кривошип, введенный с основанием и с шатуном в одноподвижные вращательные (шарнирные) кинематические пары, оси которых параллельны (Артоболевский И.И. Механизмы в современной технике. - М.: Наука, 1979. - Т.2, с.75, рис.976). Подвижная связь ползуна с направляющей здесь выполнена в виде одноподвижной поступательной кинематической пары, соединение ползуна с шатуном - в виде одноподвижной вращательной (шарнирной) кинематической пары. Параллельные оси всех вращательных кинематических пар (шарниров) выполнены ортогональными направляющей одноподвижной поступательной кинематической пары. Кинематические возможности этого механизма ограничены прямолинейным возвратно-поступательным характером перемещения ползуна по направляющей.
Наиболее близким к заявляемому устройству является реверсивный кривошипно-ползунный механизм, содержащий основание с направляющей, подвижно связанный с ней ползун, который соединен с шатуном, а также кривошип, введенный с основанием во вращательную (шарнирную), а с шатуном - в винтовую кинематическую пару, оси которых параллельны, и устройство изменения направления вращения кривошипа (SU №1404712, F16H 21/20, опубл. 23.06.88, бюл. №23). Подвижная связь ползуна с направляющей в этом механизме также выполнена в виде одноподвижной поступательной кинематической пары. Ползун соединен с шатуном шарниром. Винтовая кинематическая пара в этом механизме развита с помощью шарнира до винтошарнирного кинематического соединения. Вращательные кинематические пары (шарниры) с параллельными осями здесь выполнены также ортогональными направляющей одноподвижной поступательной кинематической пары. Вне зависимости от внешнего вида и очертаний к ползунам, в общем случае, относят звенья, образующие с направляющей кинематические пары, допускающие хотя бы одно поступательное смещение. Также и к шатунам относят звенья, входящие в кинематические пары только с подвижными звеньями. Кинематические возможности этого механизма расширены за счет наложения на прямолинейное возвратно-поступательное движение ползуна по направляющей дополнительного поступательного продольного перемещения. Однако возможности и этого механизма ограничены из-за того, что перемещение ползуна по направляющей происходит только по линии, перпендикулярной оси вращения кривошипа.
Задача, на решение которой направлено изобретение, - расширение функциональных возможностей механизма за счет наложения на основное движение ползуна его поперечного смещения параллельно оси вращения кривошипа.
Технический результат достигается тем, что в реверсивном кривошипно-ползунном механизме, содержащим основание с направляющей, подвижно связанный с ней ползун, который соединен с шатуном, а также кривошип, введенный с основанием во вращательную, а с шатуном - в винтовую кинематическую пару, оси которых параллельны, и устройство изменения направления вращения кривошипа, подвижная связь ползуна с направляющей выполнена в виде кинематической пары с подвижностью от двух до пяти и с возможностью смещения в направлении оси винтовой кинематической пары. В частности, в реверсивном кривошипно-ползунном механизме соединение шатуна с ползуном выполнено неподвижным, а подвижная связь ползуна с направляющей - в виде кинематической пары с подвижностью от четырех до пяти.
Новыми по сравнению с прототипом в предложенном устройстве являются:
новые формы выполнения связи между элементами:
подвижная связь ползуна с направляющей выполнена в виде кинематической пары с подвижностью от двух до пяти и с возможностью смещения в направлении оси винтовой кинематической пары;
в частности, соединение шатуна с ползуном выполнено неподвижным;
в частности, подвижное соединение ползуна с направляющей выполнено в виде кинематической пары с подвижностью от четырех до пяти.
Таким образом, по мнению авторов, предложение является новым по сравнению с прототипом, так, как оно неизвестно из уровня техники.
Предложение, по мнению авторов, имеет изобретательский уровень, так как оно для специалистов явным образом не следует из уровня техники и не может быть разработано с использованием известных методов, методик, правил и приемов расчета, проектирования и конструирования машин и их механизмов.
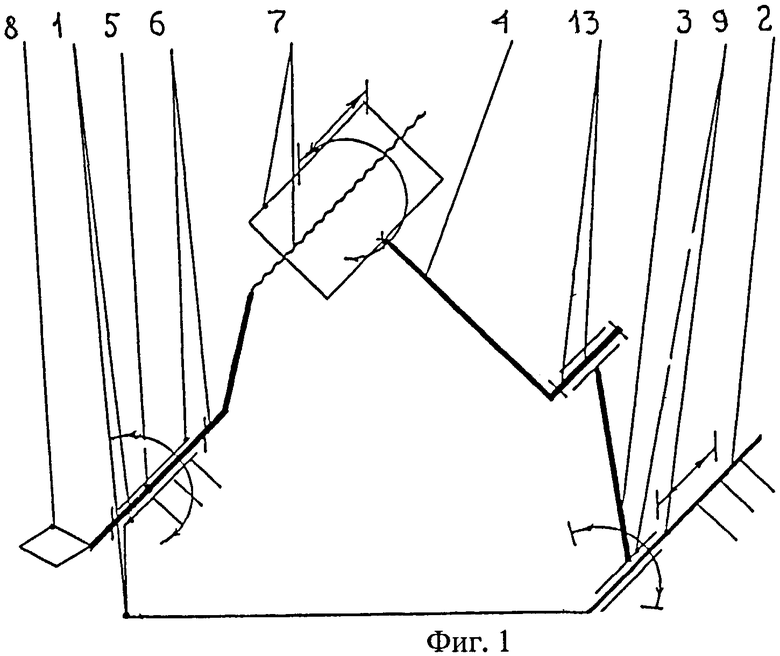
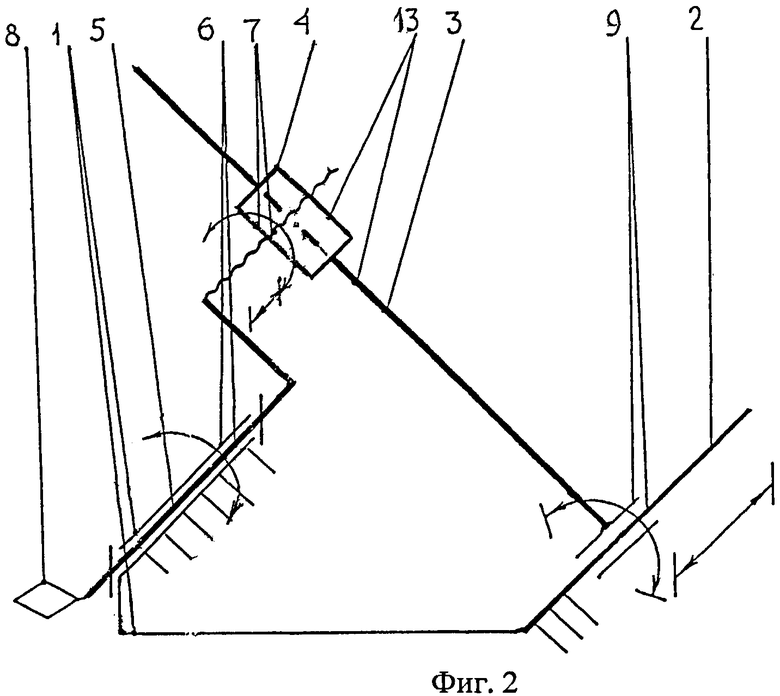
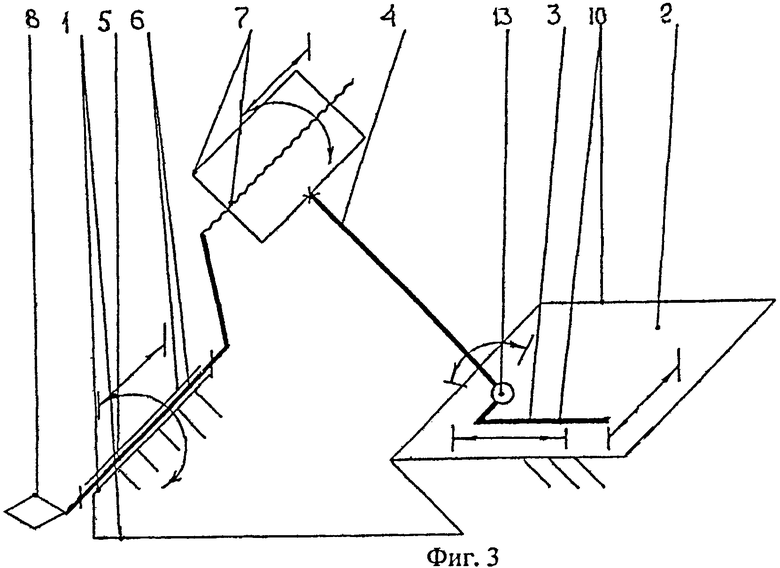
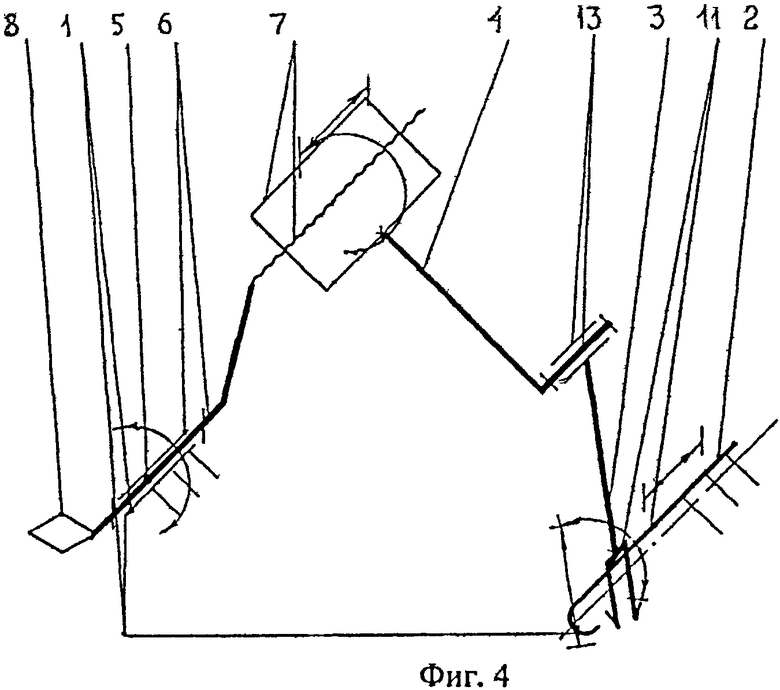
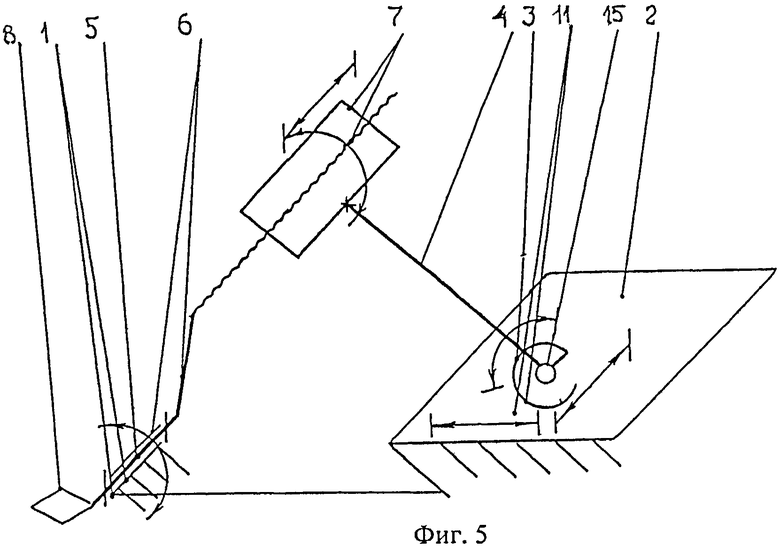
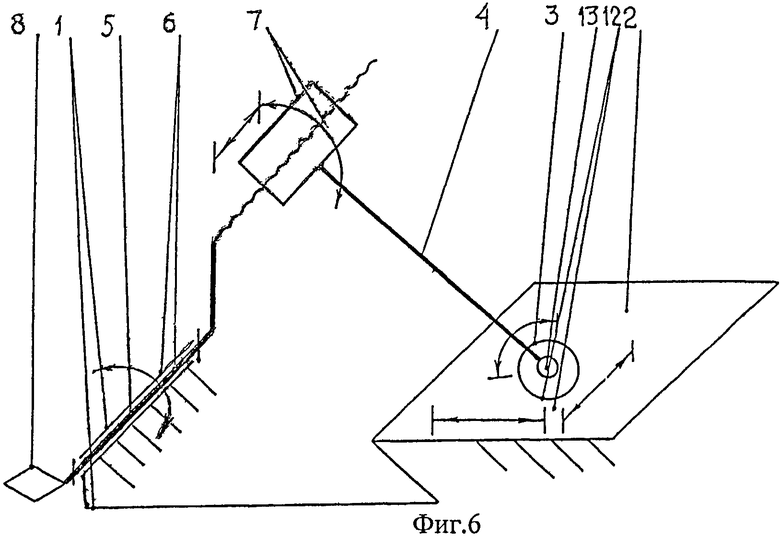
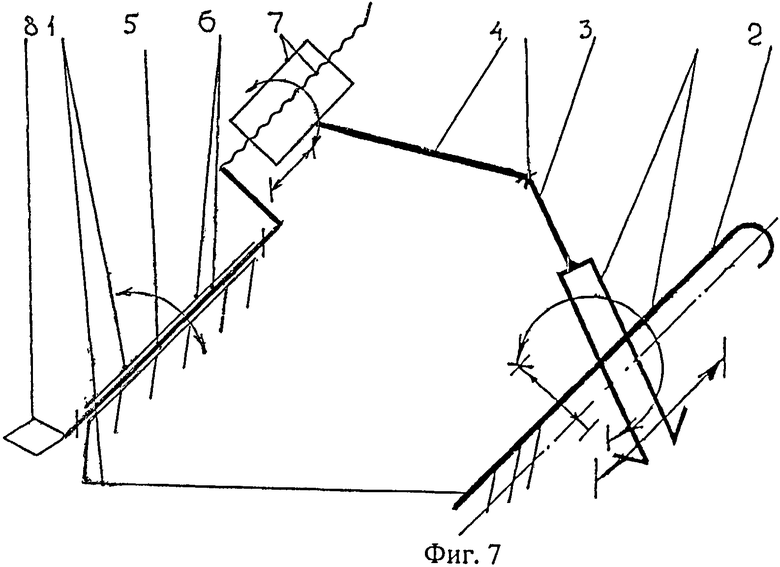
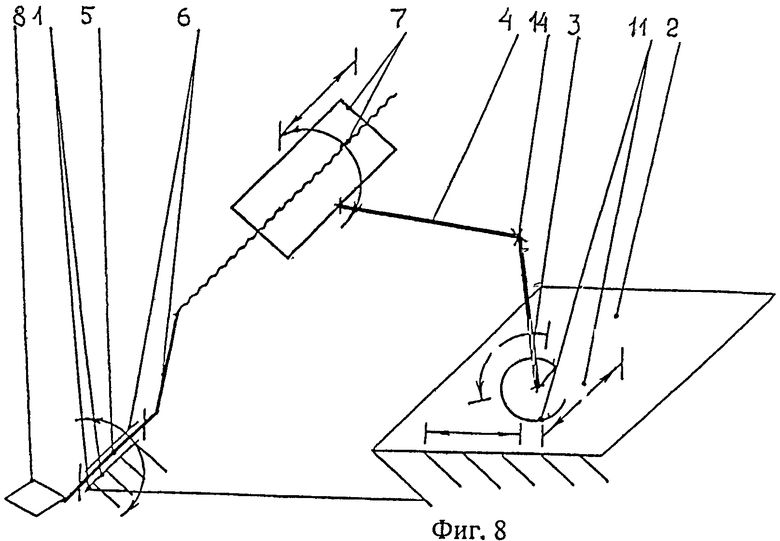
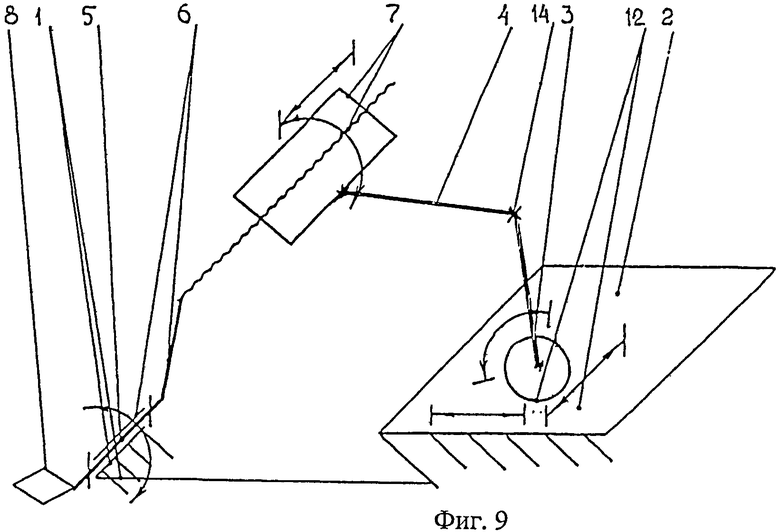
Предложенное техническое решение иллюстрируется чертежами, где на фиг.1-4 представлены структурные схемы некоторых выполнений механизма реверсивного кривошипно-ползунного с шатуном, соединенным с ползуном, при разном выполнении подвижной связи ползуна с направляющей; на фиг.5-9 - то же, с шатуном, соединение которого с ползуном выполнено неподвижным, а подвижная связь ползуна с направляющей - в виде кинематической пары с подвижностью от четырех до пяти.
Согласно предложению (фиг.1-9) реверсивный кривошипно-ползунный механизм содержит основание 1 с направляющей 2. С ней подвижно связан ползун 3, с которым соединен шатун 4. Кривошип 5 механизма введен с основанием 1 во вращательную 6, а с шатуном 4 - в винтовую 7 кинематические пары, оси которых параллельны. Кроме того, механизм содержит устройство 8 изменения направления вращения кривошипа 5 одного из известного выполнения. Подвижная связь ползуна 3 с направляющей 2 выполнена в виде кинематической пары с подвижностью от двух до пяти и с возможностью смещения в направлении оси винтовой кинематической пары 7: на фиг.1 и 2 - в двухподвижную цилиндрическую кинематическую пару 9; на фиг.3 - в трехподвижную плоскостную кинематическую пару 10; на фиг.4 и 5 - в четырехподвижную кинематическую пару 11 типа "поперечный цилиндр на плоскости" и на фиг.6 - в пятиподвижную точечную ("шар на плоскости") кинематическую пару 12. Соединение 13 шатуна 4 с ползуном 3 выполнено в виде кинематической пары одного из известных видов: или шарнирной (см. фиг.1, 4 и др.), или поступательной (см. фиг.2), или винтовой и пр. В частности, в реверсивном кривошипно-ползунном механизме соединение 13 ползуна 3 с шатуном 4 выполнено неподвижным с помощью скрепления одного из известных видов. Подвижная связь ползуна 3 с направляющей 2 выполнена в виде кинематической пары с подвижностью от четырех до пяти (на фиг.7 и 8 в четырехподвижную кинематическую пару 11 типа "поперечный цилиндр на плоскости" и на фиг.9 - в пятиподвижную точечную ("шар на плоскости") кинематическую пару 12).
Предложенный реверсивный кривошипно-ползунный механизм (см. фиг.1-9) работает следующим образом. Приводя во вращение кривошип 5 относительно основания 1 в их кинематической паре 6 через шатун 4, введенный с кривошипом 5 в кинематическую пару 7, а с ползуном 3 - в кинематическую пару 15, этот ползун 3 приводят в движение. Кинематическая пара 9, или 10, или 11, или 12, образованная ползуном 3 с направляющей 2, обуславливает сложный характер его движения, при котором на его основное перемещение в плоскости, перпендикулярной оси винтовой кинематической пары, накладывают дополнительное поперечное перемещение в направлении, параллельном оси этой кинематической пары. При достижении ползуном 3 крайнего положении с помощью устройства 8 изменяют направление вращения кривошипа 5 и осуществляют движение ползуна 3 в противоположном направлении. Разное выполнение подвижной связи ползуна 3 с направляющей 2 обеспечивает требуемое по разным соображениям количество избыточных связей механизма: так, при выполнении кинематической пары 9 двухподвижной количество избыточных связей равно 3, при выполнении кинематической пары 10 трехподвижной - 2, при выполнении кинематической пары 11 четырехподвижной - 1 и при выполнении кинематической пары 12 пятиподвижной - 0. В частности, при выполнении соединения шатуна 4 с ползуном 3 неподвижным работу осуществляют аналогично описанному выше с меньшими потерями энергии на трение и при большой надежности действия за счет уменьшения количества звеньев и кинематических пар в механизме.
При предложенном выполнении механизма по сравнению с прототипом его возможности передавать и преобразовывать движение и силы существенно расширяются.
Предложенный реверсивный кривошипно-ползунный механизм выполнен организацией-заявителем в нескольких вариантах. При испытаниях он продемонстрировал свою работоспособность и возможность достижения технического результата. Таким образом, предложение, по мнению авторов, имеет промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН | 2019 |
|
RU2699695C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМ ШАТУНОМ | 2006 |
|
RU2298124C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2006 |
|
RU2326765C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
Изобретение относится к устройствам для передачи и преобразования движения. Реверсивный кривошипно-ползунный механизм содержит основание с направляющей. С направляющей подвижно связан ползун, который соединен с шатуном. Кривошип введен с основанием во вращательную, а с шатуном - в винтовую кинематические пары, оси которых параллельны. Механизм содержит устройство изменения направления вращения кривошипа. Подвижная связь ползуна с направляющей выполнена в виде кинематической пары с подвижностью от двух до пяти и с возможностью смещения в направлении оси винтовой кинематической пары. Техническим результатом является расширение функциональных возможностей механизма и повышение надежности. 1 з.п. ф-лы, 9 ил.
1. Реверсивный кривошипно-ползунный механизм, содержащий основание с направляющей, подвижно связанный с ней ползун, который соединен с шатуном, а также кривошип, введенный с основанием во вращательную, а с шатуном - в винтовую кинематическую пару, оси которых параллельны, и устройство изменения направления вращения кривошипа, отличающийся тем, что подвижная связь ползуна с направляющей выполнена в виде кинематической пары с подвижностью от двух до пяти и с возможностью смещения в направлении оси винтовой кинематической пары.
2. Реверсивный кривошипно-ползунный механизм по п.1, отличающийся тем, что соединение шатуна с ползуном выполнено неподвижным, а подвижная связь ползуна с направляющей - в виде кинематической пары с подвижностью от четырех до пяти.
| Реверсивный кривошипно-ползунный механизм | 1986 |
|
SU1404712A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1990 |
|
RU2017038C1 |
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1986 |
|
SU1337586A1 |
| Кривошипно-кулисный механизм | 1976 |
|
SU577337A1 |

