Изобретение относится к передаточным механизмам, которые преобразуют вращательное движение кривошипа во взаимно противоположные возвратно-поступательные соосные движения двух ползунов, и может быть использовано для повышения технического ресурса машинных агрегатов различного назначения, в состав которых входят передаточные механизмы такого рода.
Известен оппозитный кривошипно-ползунный механизм по патенту N 2085791 [1] , содержащий стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип в виде полого вала с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых сферическими шарнирами соединен с соответствующим ползуном и плечом кривошипа. Продольная ось направляющей ползунов пересекает ось вращения кривошипа под острым углом в центральной точке кривошипа. Шарниры между плечами кривошипа и соответствующими шатунами установлены на внутренней поверхности полого вала в диаметрально противоположных точках.
Движение механизма происходит под действием сил, приложенных к кривошипу. Движущие силы от кривошипа передаются через шатуны к ползунам, преодолевая силы технологического сопротивления, которые действуют на ползуны вдоль продольной оси их направляющей. При передаче сил от кривошипа к ползунам возникают силы реакций в кинематических парах механизма. В шарнирах соединения шатунов с плечами кривошипа силы реакций имеют составляющие, параллельные оси вращения кривошипа и оказывающие боковое давление на кривошип. В шарнирах соединения шатунов с ползунами силы реакций имеют составляющие, перпендикулярные направляющей ползунов и оказывающие боковое давление на направляющую и на ползуны.
Силы бокового давления на кривошипе приложены в диаметрально противоположных точках полого вала. Они образуют пару сил, вектор-момент которой периодически меняется по модулю и по направлению. Действие момента пары сил на шарнирное соединение кривошипа со стойкой приводит к накоплению дополнительных усталостных повреждений в элементах этого соединения.
Силы бокового давления на ползунах вызывают дополнительный износ контактирующих поверхностей ползунов и направляющей.
Таким образом, недостатком оппозитного кривошипно-ползунного механизма с полым валом является возникновение при работе механизма сил бокового давления на кривошип и на ползуны. Действие этих сил приводит к накоплению дополнительных усталостных повреждений в соединении кривошипа со стойкой, к интенсивному износу контактирующих поверхностей ползунов и их направляющей. В результате сокращается время безотказной работы механизма.
Наиболее близким техническим решением по совокупности признаков является оппозитный кривошипно-ползунный механизм [2], содержащий (фиг. 1) стойку 1 с прямолинейной направляющей 2, установленные в направляющей два идентичных ползуна 3 и 4, двуплечий кривошип 5 с фиксированной на стойке осью вращения 6, два идентичных шатуна 7 и 8. Шарниры 9, 10, 11, 12, связывающие концы шатунов 7 и 8 с плечами кривошипа 5 и с ползунами 3, 4, выполнены сферическими. Ось 6 вращения кривошипа 5 параллельна продольной оси 13 направляющей 2. Ось 13 проходит через центры шарниров 11 и 12. Эта ось, а также продольные оси шатунов 7 и 8 расположены в одной шатунной плоскости.
При движении механизма с преодолением сил технологического сопротивления в шарнирах 9 и 10 возникают силы бокового давления, параллельные оси 6 вращения кривошипа, а в шарнирах 11 и 12 - силы бокового давления, перпендикулярные продольной оси 13 направляющей ползунов.
Силы бокового давления на кривошип взаимно уравновешиваются, они не передаются на шарнирное соединение кривошипа со стойкой. Поэтому у данного механизма в шарнирном соединении кривошипа со стойкой накопление усталостных повреждений происходит менее интенсивно, чем у механизма с полым валом. Но действие изменяющихся по величине сил бокового давления приводит к накоплению усталостных повреждений в плечах кривошипа.
Силы бокового давления на ползунах вызывают износ контактирующих поверхностей ползунов и их направляющей.
Таким образом, недостатком оппозитного кривошипно-ползунного механизма является возникновение сил бокового давления на плечи кривошипа и на ползуны от движущих сил механизма. Действие боковых сил приводит к накоплению дополнительных усталостных повреждений плеч кривошипа, к интенсивному износу контактирующих поверхностей ползунов и их направляющей. В связи с этим сокращается технический ресурс механизма.
В основу изобретения положена задача создать оппозитный кривошипно-ползунный механизм, у которого полностью исключено боковое давление на плечи кривошипа и на ползуны от движущих сил механизма за счет перераспределения нагрузок на кинематические пары механизма путем введения дополнительных звеньев и изменения взаимных связей между звеньями.
Решение этой задачи позволит повысить технический ресурс механизма, так как исключение бокового давления на плечи кривошипа и на ползуны приведет к снижению интенсивности накопления усталостных и износных повреждений звеньев.
Поставленная задача решается тем, что в известный оппозитный кривошипно-ползунный механизм, содержащий стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых кинематическими парами соединен с соответствующим ползуном и плечом кривошипа, при этом ось вращения кривошипа параллельна направляющей ползунов, продольные оси шатунов и направляющей ползунов расположены в одной шатунной плоскости, а кинематические пары между шатунами и соответствующими плечами кривошипа выполнены в виде сферических шарниров, дополнительно введены два идентичных коромысла, каждое из которых соединено сферическими шарнирами со стойкой и с соответствующим шатуном, при этом центр шарнира соединения коромысла с шатуном совпадает со средней точкой шатуна, центр шарнира соединения коромысла со стойкой расположен в точке пересечения продольной оси направляющей ползунов с плоскостью вращения соответствующего плеча кривошипа, длина коромысла равна длине плеч шатуна, а кинематические пары между шатунами и соответствующими ползунами выполнены с возможностью одного поступательного движения вдоль расположенной в шатунной плоскости оси, перпендикулярной направляющей ползунов, и двух вращательных движений вокруг взаимно перпендикулярных осей, из которых первая ось направлена по нормали к шатунной плоскости, вторая совпадает с продольной осью направляющей ползунов.
Кроме того, конец каждого шатуна в кинематической паре между шатуном и ползуном выполнен в виде прямого кругового цилиндра с кольцевым пазом, у которого параллельная основанию цилиндра плоскость симметрии совпадает с шатунной плоскостью, каждый ползун выполнен с П-образной полостью, боковые стенки которой перпендикулярны направляющей ползунов и на которых вдоль продольной оси направляющей ползунов прикреплены цилиндрические пальцы, при этом цилиндрический конец шатуна установлен в П-образной полости ползуна с размещением пальцев в кольцевом пазу, а расстояние между боковыми стенками П-образной полости равно диаметру основания цилиндра и диаметр пальцев равен ширине кольцевого паза.
За счет установки в заявляемом механизме двух идентичных коромысел как дополнительных связей шатунов со стойкой, за счет соединения шатунов и соответствующих ползунов кинематическими парами, допускающими в относительном движении соединяемых звеньев одно поступательное и два вращательных движения (такие кинематические пары относятся к парам третьего класса второго вида [3]), за счет определенного взаимного расположения всех кинематических пар и определенной ориентации их осей траектория перемещения конца шатуна в кинематической паре между шатуном и ползуном при движении механизма совпадает с продольной осью направляющей ползунов.
Условие совпадения траектории конца шатуна с продольной осью направляющей ползунов обеспечивается, несмотря на то, что кинематическая пара между шатуном и ползуном допускает в относительном движении соединяемых звеньев поступательное движение вдоль расположенной в шатунной плоскости оси, перпендикулярной направляющей ползунов.
Совпадение траектории конца шатуна с продольной осью направляющей ползунов при отсутствии ограничений на смещение конца шатуна вдоль расположенной в шатунной плоскости оси, перпендикулярной направляющей ползунов, объясняется следующим.
Заявляемый механизм имеет три особенности: во-первых, центр шатуна между коромыслом и шатуном расположен на продольной оси шатуна, во-вторых, центр шарнира между коромыслом и стойкой совпадает с точкой пересечения продольной оси направляющей ползунов с перпендикулярной к ней плоскостью вращения центра шарнира между шатуном и соответствующим плечом кривошипа, в-третьих, кинематическая пара между шатуном и ползуном исключает в относительном движении соединяемых звеньев поступательное движение вдоль оси, перпендикулярной шатунной плоскости и продольной оси направляющей ползунов. Из этого следует, что продольные оси шатунов, коромысел и направляющей ползунов в любом положении механизма расположены в одной шатунной плоскости, а прямая, проходящая через центры шарниров, связывающих кривошип с шатуном и коромысло со стойкой, перпендикулярна продольной оси направляющей ползунов.
Обеспечение данного условия в сочетании с равенством длины коромысла длине плеч шатуна приводит к тому, что конец шатуна в кинематической паре между шатуном и ползуном на основании известного свойства эллипсографа расположен на продольной оси направляющей ползунов в любом положении механизма. То есть траектория конца шатуна совпадает с продольной осью направляющей ползунов, а допускаемое кинематической парой между шатуном и ползуном поступательное относительное движение соединяемых звеньев вдоль расположенной в шатунной плоскости оси, перпендикулярной направляющей ползунов, имеет виртуальный характер: оно допускается, но не реализуется.
Совпадение траектории перемещения конца шатуна с продольной осью направляющей ползунов при отсутствии ограничений на смещение конца шатуна вдоль расположенной в шатунной плоскости оси, перпендикулярной направляющей ползунов, приводит к тому, что сила реакции в кинематической паре между шатуном и ползуном от движущих сил механизма направлена вдоль продольной оси направляющей ползунов. Это означает, что боковое давление на ползун от движущих сил механизма отсутствует.
Обеспечение условия постоянной направленности силы реакции в кинематической паре между шатуном и ползуном вдоль продольной оси направляющей ползунов в сочетании с тем, что сила реакции коромысла всегда направлена вдоль продольной оси коромысла, приводит к тому, что сила реакции в шарнире соединения шатуна с кривошипом на основании известной теоремы о трех силах (три взаимно уравновешенные силы лежат в одной плоскости и пересекаются в одной точке) всегда направлена по прямой, проходящей через центры соединения шатуна с плечом кривошипа и коромысла со стойкой. Но эта прямая лежит в плоскости вращения плеча кривошипа. Следовательно, сила реакции в шарнире соединения шатуна с плечом кривошипа от движущих сил механизма лежит в плоскости вращения плеча кривошипа, она не создает бокового давления на плечо кривошипа.
Таким образом, введение в состав механизма двух идентичных коромысел как дополнительных связей шатунов со стойкой и соединение шатунов с ползунами кинематическими парами третьего класса второго вида привели к перераспределению нагрузок на кинематические пары механизма, к полному исключению сил бокового давления на плечи кривошипа и на ползуны, что обеспечивает увеличение технического ресурса механизма.
На фиг. 1 изображена схема механизма прототипа, на фиг. 2 - схема заявляемого оппозитного кривошипно-ползунного механизма, на фиг. 3 - схема кинематической пары между шатуном и ползуном.
Оппозитный кривошипно-ползунный механизм (фиг. 2) содержит стойку 1 с прямолинейной направляющей 2, установленные в направляющей два идентичных ползуна 3 и 4, двуплечий кривошип 5 с фиксированной на стойке осью вращения 6, два идентичных шатуна 7 и 8, два идентичных коромысла 9 и 10. Шарниры 11, 12, связывающие шатуны 7, 8 с соответствующими плечами кривошипа 5, а также шарниры 13, 14 и 15, 16, связывающие коромысла 9, 10 соответственно со стойкой 1 и с шатунами 7, 8, выполнены сферическими. Шатуны 7 и 8 соединены с ползунами 3 и 4 кинематическими парами 17 и 18, относящимися к парам третьего класса второго вида.
При этом ось вращения кривошипа 5 параллельна продольной оси 19 направляющей 2, ось 19 проходит через концы шатунов 7 и 8 в кинематических парах 17 и 18. Продольные оси шатунов 7 и 8, коромысел 9 и 10, ось 19 расположены в одной шатунной плоскости, с которой на фиг. 2 связана прямоугольная система координат Oxyz. Центры шарниров 13 и 14 расположены в точке пересечения оси 19 с плоскостями вращения центров шарниров 11 и 12 соответственно, шарниры 15 и 16 - в средних точках шатунов 7 и 8. Длина коромысла 9(10) равна длине плеч шатуна 7(8).
Конец шатуна 7 в кинематической паре между ползуном 3 и шатуном 7 (фиг. 3) выполнен в виде прямого кругового цилиндра 20 с кольцевым пазом 21. Плоскость симметрии кольцевого паза 21, параллельная основанию цилиндра 20, совпадает с шатунной плоскостью 22. С шатунной плоскостью 22 связана прямоугольная система координат Axyz.
Ползун 3 (фиг. 3) выполнен с П-образной полостью 23. Боковые стенки 24 и 25 полости перпендикулярны направляющей ползунов 2 (на фиг. 3 изображена только половина боковой стенки 25), к боковым стенкам 24 и 25 вдоль продольной оси 19 прикреплены цилиндрические пальцы 26 (на фиг. 3 виден только палец стенки 25, а идентичный с ним палец стенки 24 расположен за цилиндром 20).
Цилиндрический конец шатуна 20 (фиг. 3) установлен между боковыми стенками 24, 25 полости 23 с размещением пальцев 26 в кольцевом пазу 21.
Расстояние между стенками 24 и 25 равно диаметру основания цилиндра 20. Диаметр пальцев 26 равен ширине кольцевого паза 21.
Кинематическая пара между ползуном 3 и шатуном 7 (фиг. 3) допускает в относительном движении соединяемых звеньев одно поступательное движение в шатунной плоскости 22 вдоль оси, параллельной Ay, и два вращательных движения вокруг оси 19 и оси 1, параллельной Az.
Механизм работает следующим образом. При вращении кривошипа 5 вокруг оси 6 (фиг. 2) его плечо с шарниром 11(12) движется в плоскости, перпендикулярной оси 6 и проходящей через шарнир 13(14). В связи с тем, что кинематические пары 17, 18 исключают смещение концов шатунов 7, 8 в направлении оси 1 (фиг. 2 и 3), продольные оси этих шатунов и продольные оси коромысел 9, 10 при вращении кривошипа 5 остаются в одной шатунной плоскости, которая поворачивается вокруг оси 19. При этом конец шатуна 7(8) движется вдоль оси 19, несмотря на то, что кинематическая пара 17(18) допускает смещение этого конца в направлении, перпендикулярном оси 19 и параллельном оси Ay. Такое движение конца шатуна обусловлено следующим. Шатун 7(8) и коромысло 9(10) перемещаются в шатунной плоскости подобно тому, как движутся звенья механизма эллипсографа. Как известно, концы шатуна механизма эллипсографа перемещаются по взаимно перпендикулярным прямым, даже если прямолинейная направляющая имеется только у одного конца шатуна. В механизме на фиг. 2 конец шатуна 7(8), совпадающий с шарниром 11(12), перемещается в шатунной плоскости по прямой, проходящей через шарниры 11 и 13 (12 и 14), которая перпендикулярна оси 19. Поэтому конец шатуна 7(8) в кинематической паре 17(18) должен перемещаться вдоль оси 19, даже если пара 17(18) не ограничивает его смещение в поперечном направлении вдоль оси Oy. Движение концов шатунов 7, 8 передается ползунам 3, 4, которые при непрерывном вращении кривошипа 5 совершают возвратно-поступательное движение вдоль оси 19 во взаимно противоположных направлениях.
В связи с тем, что концу шатуна 7(8) предоставлена возможность смещаться в шатунной плоскости по направлению, перпендикулярному оси 19, но это направление не реализуется, сила реакции в кинематической паре 17(18) от движущих сил механизма всегда направлена по оси 19, то-есть боковое давление на ползун 3(4) отсутствует.
На шатун 7(8) действуют три силы реакций связей: в кинематической паре 17(18), в шарнире 11(12) и в коромысле 9(10). Сила реакции пары 17(18) направлена, как уже отмечалось, вдоль оси 19, сила реакции коромысла 9(10) направлена вдоль его продольной оси, сила реакции шарнира 9(10) на основании известной теоремы о трех силах направлена по прямой, проходящей через шарниры 11 и 13(12 и 14). Но эта прямая расположена в плоскости вращения плеча кривошипа с шарниром 11(12). Следовательно, сила реакции шарнира 11(12) от движущих сил механизма лежит в указанной плоскости и не создает бокового давления на плечо кривошипа.
Таким образом, введение в состав механизма двух идентичных коромысел 9(10) как дополнительных связей шатунов со стойкой и соединение шатунов 7(8) с ползунами 3(4) кинематическими парами 17(18) третьего класса второго вида привели к перераспределению нагрузок на кинематические пары механизма, к полному исключению сил бокового давления на кривошип в шарнирах 11(12) и сил бокового давления на ползуны 3(4) от движущих сил механизма.
Использование заявляемого решения позволит снизить интенсивность накопления усталостных и износных повреждений звеньев механизма, повысить технический ресурс механизма.
Источники информации
1. Патент РФ N 2085791, кл. F 16 H 21/16, 1997.
2. Доронин В.И. Синтез динамически уравновешенных пространственных рычажных механизмов.// Вестник ДВО РАН, N 4, 1995. С. 49-56.
3. Артоболевский И.И. Теория механизмов.- М.: Наука, 1965, с. 776.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| ДВУХОСНАЯ ЛОКОМОТИВНАЯ ТЕЛЕЖКА С РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2005 |
|
RU2291079C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| ШАРНИРНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1993 |
|
RU2075672C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕЛЕЖКАМИ ЛОКОМОТИВА В КРИВЫХ УЧАСТКАХ ПУТИ | 1997 |
|
RU2119437C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2008 |
|
RU2404385C2 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |


Оппозитный кривошипно-ползунный механизм содержит стойку с прямолинейной направляющей, установленные в ней два идентичных ползуна, двуплечий кривошип с фиксированной на стойке осью вращения, два идентичных шатуна и два идентичных коромысла. Шарниры, связывающие шатуны с соответствующими плечами коромысла, а также шарниры, связывающие оба коромысла со стойкой и с шатунами, выполнены сферическими. Шатуны соединены с соответствующими ползунами кинематическими парами, каждая из которых выполнена с возможностью поступательного вдоль расположенной в шатуне плоской оси, перпендикулярной направляющей ползунов, и вращательных движений вокруг взаимно перпендикулярных осей, из которых одна направлена по нормали к шатунной плоскости, а вторая совпадает с продольной осью направляющей ползунов. Такое выполнение механизма позволяет исключить боковое давление на плечи кривошипа и ползуны. 1 з.п. ф-лы, 3 ил.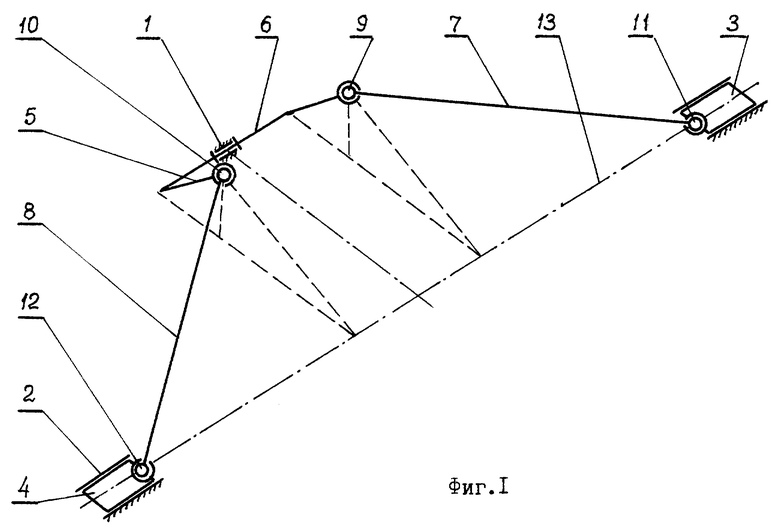
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, т.11 | |||
| - М.: Наука, 1971, с.502 | |||
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |

