Изобретение относится к машиностроению, в частности к устройствам для преобразования возвратно-поступательного движения в одностороннее вращательное.
Известно устройство для преобразования возвратно-поступательного движения в одностороннее вращательное типа "Юлы" (детский волчок БА-490-085, 1920, прототип), содержащее корпус, в котором вертикально установлен несамотормозящийся винтовой механизм. Его ведущее звено - винт - снабжен рукояткой, через которую на винт воздействуют осевой приводной силой, а ведомое звено выполнено в виде легкой гайки, размещенной на винте с возможностью взаимодействия с корпусом. При движении винта вниз его поступательное перемещение преобразуется во вращательное движение гайки, которое передается и корпусу. В это время (рабочий ход) момент трения (сцепление) между корпусом и гайкой больше, чем крутящий момент, возникающий между корпусом и гайкой, и больше, чем крутящий момент, возникающий между винтом и гайкой, а в винтовой паре нет самоторможения.
Перемещением винта вверх приводят его в исходное положение, осуществляя холостой ход, во время которого гайка за счет инерции в первоначальный момент вместе с винтом, а затем под действием собственного веса опускается по винту (свинчивается) вниз до соприкосновения с корпусом, то есть вращается относительно корпуса в противоположную сторону, тем самым возвращают гайку в исходное положение для последующего взаимодействия с винтом.
Оптимальная скорость движения винта вверх при холостом ходе должна быть приблизительно равна скорости, с которой гайка опускается вниз. Если скорость перемещения винта вверх меньше скорости перемещения гайки вниз, то гайка препятствует свободному вращению корпуса. Если скорость перемещения винта вверх больше скорости перемещения гайки вниз, то гайка не успевает опуститься до поверхности взаимодействия с корпусом и поэтому при движении винта часть его хода будет холостым, а скорость перемещения винта при холостом ходе ограничена скоростью схода гайки по винту.
Таким образом, возвратно-поступательное вертикальное перемещение винта за сет взаимодействующей с ним гайки преобразуется в одностороннее вращательное движение корпуса. Работоспособность этого устройства определяется цикличностью возвратно-поступательных движений.
Поскольку возврат гайки по винту происходит за счет ее силы тяжести, то данная конструкция работает только в вертикальном положении, что и является ее основным недостатком: при любом другом пространственном расположении винтового механизма конструкция устройства значительно усложняется или не осуществляется преобразования.
Задачей, на решение которой направлено изобретение, является расширение кинетических возможностей винтового механизма и упрощение преобразования.
Задача решается тем, что устройство для преобразования возвратно-поступательного движения в одностороннее вращательное, содержащее корпус, установленный в нем несамотормозящийся винтовой механизм, включающий ведущее звено с узлом приложения осевой силы и ведомое звено, установленное с возможностью вращения вокруг своей оси, дополнительно снабжено инерционным элементом и шариками, ведомое звено связано с корпусом и инерционным элементом, узел приложения осевой силы выполнен в виде ручки со стержнем, при этом торцевые поверхности ведущего звена и ручки, обращенные одна к другой, выполнены фрикционными, а на внутренней поверхности ведущего звена, расположенной параллельно его продольной оси, выполнены равномерно размещенные по оси канавки, каждый шарик расположен в соответствующей канавке и предназначен для взаимодействия с наружной поверхностью стержня.
Наличие этих отличительных признаков выявляет новые свойства предлагаемого устройства:
связь ведущего звена с узлом приложения осевой силы обеспечивает непрерывное одностороннее вращение ведомого звена под действием осевых сил с получением его инерционного вращения после прекращения воздействия этих сил, что приводит к снижению потерь энергии при возврате ведущего звена в исходное положение;
возможность преобразования возвратно-поступательного перемещения в одностороннее вращательное, при котором возврат ведущего звена и исходное положение для осуществления последующего преобразования производят принудительно, не оказывая существенного влияния на вращение ведомого звена при любом пространственном расположении винтового механизма.
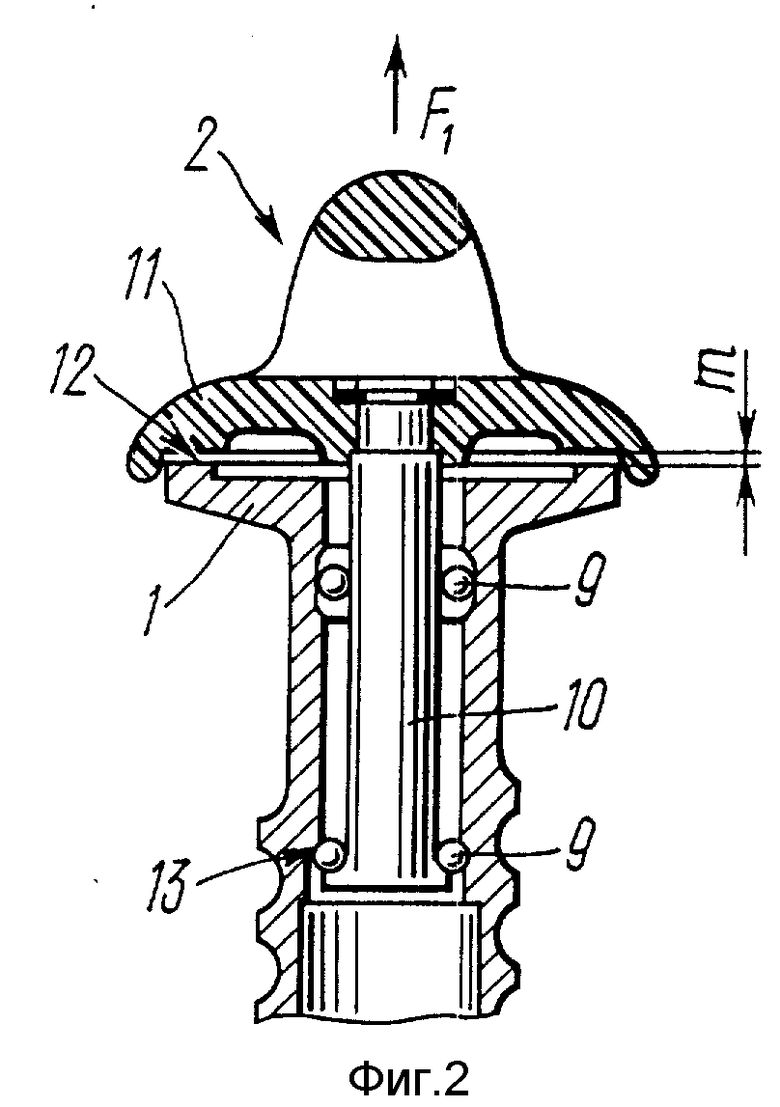
На фиг. 1 изображена конструкция устройства, с помощью которого осуществляют преобразование возвратно-поступательного движения в одностороннее инерционное вращение, продольный разрез; на фиг. 2 - конструкция устройства для преобразования движений во время возврата ведущего звена в исходное положение.
Предлагаемое устройство выполнено в виде несамотормозящегося винтового механизма, в качестве которого могут быть использованы винтовые передачи с малым трением скольжения или винтовые передачи качения.
Винтовой механизм содержит ведущее звено 1 (фиг. 1), представляющее собой винт, с узлом 2 приложения осевой силы и ведомое звено 3 в виде гайки, которая установлена в корпусе 4 на подшипниках 5. Ведомое звено 3 и ведущее звено 1 представляют собой винтовую передачу качения. Ведомое звено 3 связано с инерционным элементом 6, а с ведущим звеном 1 оно связано посредством тел 7 качения, при этом ведущее звено 1 снабжено ограничителем 8 хода. Узел 2 содержит связанный с ведущим звеном 1 посредством шариков 9 стержень 10, который жестко соединен с ручкой 11.
Ведущее звено 1 имеет поверхность 12, выполненную фрикционной, и поверхность 13 (выполненную скользкой), которая контактирует как опорная соответственно с наружной поверхностью стержня 10 через шарики 9. На фиг. 2 через "m" обозначена величина свободного осевого перемещения узла 2 приложения осевой силы F относительно ведущего звена 1.
Для получения вращения ведомого звена 3 с высокими скоростями и небольшими крутящими моментами предпочтительной использовать винтовые передачи, выполненные шарикодшипниковыми, в которых гайка выполнена с кольцевыми канавками, при этом основной их недостаток - низкая кинематическая точность - не сказывается на работоспособности устройства. Корпус такой гайки может быть выполнен очень легким, но выдерживать значительные нагрузки.
Устройство преобразования возвратно-поступательного перемещения в одностороннее вращательное работает следующим образом.
При действии на ручку 11 (фиг. 1) осевой силой F происходит стопорение ведущего звена 1 винта и его поступательное перемещение вниз. Ведомое звено 3 - гайка, связанная с инерционным элементом 6, начинает вращаться на радиально-упорных подшипниках 5. При достижении ведущим звеном 1 крайнего нижнего положения на него действуют силой F1 (фиг. 2), направление которой противоположно направлению силы F, при этом между стопорными поверхностями 12 образуется зазор "m". Теперь воздействие силы F1 на ведущее звено 1 передается через (скользкую) поверхность 13 с минимальным коэффициентом трения качения через шарики 9. В результате ведущее звено 1 совершает относительно ведомого звена 3 винтовое движение с направлением вращения, совпадающим с направлением вращения ведомого звена 3 - гайки. Винтовое движение ведущего звена 1 происходит за счет взаимодействия с ведомым звеном 3, вращение которого происходит по инерции.
По мере разгона ведущего звена 1 реактивный момент уменьшается, а его скорость вращения увеличивается и при достижении им верхнего положения может в несколько раз превышать скорость вращения ведомого звена 3. При прекращении действия силы F происходит частичный возврат кинетической энергии от ведущего звена 1 к ведомому звену 3, так как в этот момент их резьбовое соединение через тела 7 качения подобно обгонной муфте. Передача энергии происходит до выравнивания их скоростей. С момента, когда скорость вращения ведущего звена 1 становится равной скорости вращения ведомого звена 3, на ведущее звено 1 - винт - снова воздействуют осевой силой F и циклы повторяют до вращения ведомого звена 3 с требуемой скоростью. Затем прекращают воздействие силы F или F1 в любой момент времени, останавливая движение ручки 11, при этом ведомое звено 3 будет продолжать свое вращение по инерции, а ведущее звено 1 под действием силы тяжести и ведомого звена 3 будет смещаться вниз, создавая между стопорными поверхностями 12 (фиг. 2) зазор "m", и вращаться вместе с ведомым звеном 3. Следует отметить, что тела 7 (фиг. 1) качения постоянно вращаются в одном направлении как при преобразовании движения, так и при возврате ведущего звена 1 в исходное положение, а также при инерционном вращении ведомого звена 3.
Устройство предназначено для преобразования возвратно-поступательного движения в одностороннее вращательное. Устройство содержит ведущее звено 1, связанное с возможностью свободного осевого перемещения, свободного вращения и стопорения с узлом 2 приложения осевой силы и взаимодействует с ним по фрикционным поверхностям или через шарики 7. Ведущее звено 1 соединено с узлом 2 приложения осевой силы, выполненным в виде ручки 11 со стержнем 10, а ведомое звено 3 связано с корпусом 4 и инерционной массой 6. Устройство дает возможность получить инерционное вращение ведомого звена 3 после прекращения действия осевых сил. 2 ил.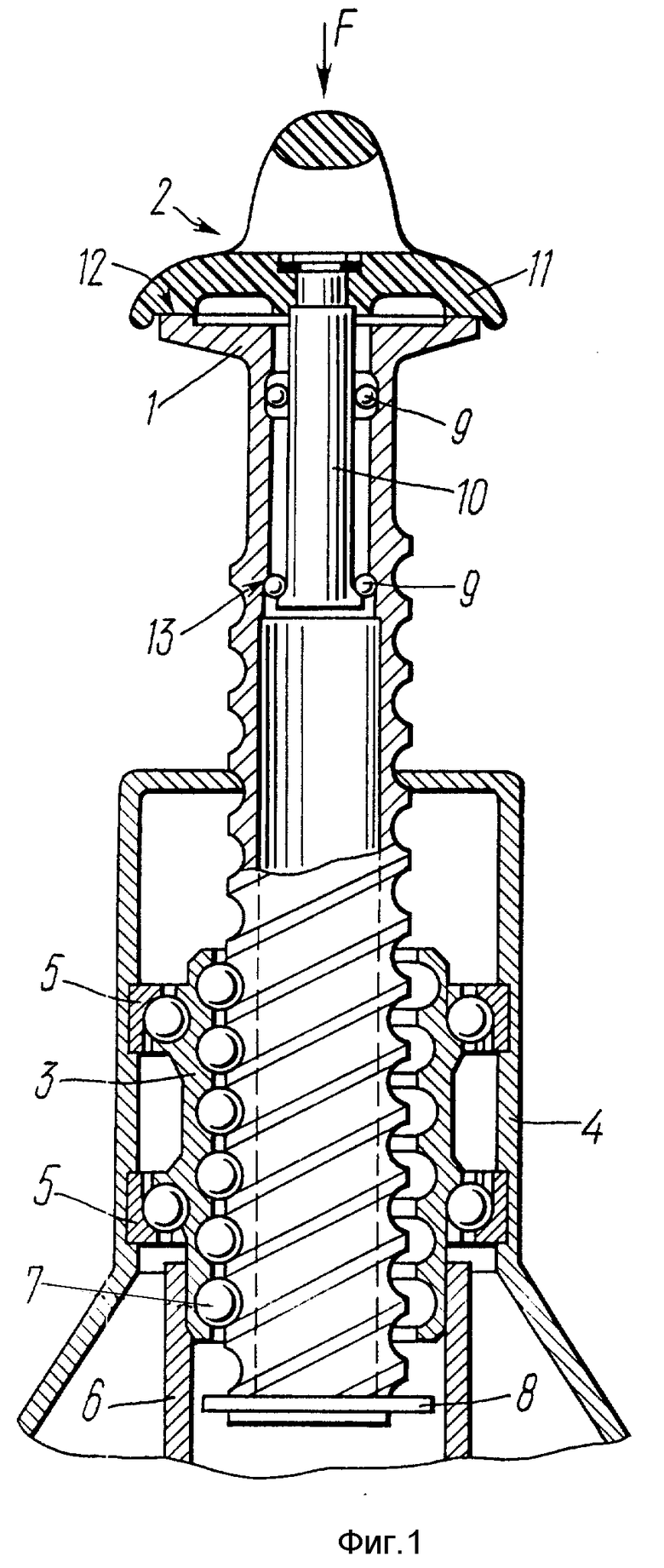
Устройство для преобразования возвратно-поступательного движения в одностороннее вращательное в виде установленного в корпусе не самотормозящегося винтового механизма, содержащее ведущее звено с узлом приложения осевой силы и ведомое звено, установленное с возможностью вращения вокруг своей оси, отличающееся тем, что оно снабжено инерционной массой и шариками, причем ведомое звено связано с корпусом и инерционной массой, узел приложения осевой силы ведущего звена выполнен в виде ручки со стержнем, ведущее звено соединено с этим узлом с возможностью свободного осевого перемещения, свободного вращения и стопорения, при этом торцевые поверхности ведущего звена и узла приложения осевой силы, обращенные друг к другу, выполнены фрикционными, а шарики предназначены для взаимодействия с внутренней поверхностью ведущего звена, расположенной параллельно его продольной оси и обращенной к наружной поверхности стержня узла приложения осевой силы, являющимися для шариков опорными.
| Юла | |||
| Детский волчок, Паспорт БА-490-085, 1920. |
