Изобретение относится к области машиностроения, в частности к устройствам для преобразования возвратно-поступательного движения в одностороннее вращательное.
Известно устройство для преобразования возвратно-поступательного движения в одностороннее вращательное типа "Юла" содержащее корпус, в котором вертикально установлен несамотормозящийся винтовой механизм. Его ведущее звено-винт снабжено рукояткой, через которую на винт воздействуют осевой приводной силой, ведомое звено выполнено в виде легкой гайки, размещенной на винте с возможностью взаимодействия с корпусом. При движении винта вниз его поступательное перемещение преобразуется во вращательное движение гайки, которое передается и корпусу. В это время (рабочий ход) момент трения (сцепление) между корпусом и гайкой больше, чем крутящий момент, возникающий между винтом и гайкой, а в винтовой паре нет самоторможения.
Перемещением винта вверх приводят его в исходное положение, осуществляя холостой ход, во время которого гайка за счет инерции в первоначальный момент вместе с винтом, а затем под действием собственного веса опускается по винту (свинчивается) вниз до соприкосновения с корпусом, то есть вращается относительно корпуса в противоположную сторону, тем самым возвращают гайку в исходное положение для последующего взаимодействия с винтом.
Оптимальная скорость движения винта вверх при холостом ходе должна быть приблизительно равна скорости, с которой гайка опускается вниз. Если скорость перемещения винта вверх меньше скорости перемещения гайки вниз, то гайка препятствует свободному вращению корпуса. Если скорость перемещения винта вверх больше скорости перемещения гайки вниз, то гайка не успевает опуститься до поверхности взаимодействия с корпусом и поэтому при движении винта часть его хода будет холостым и скорость перемещения винта при холостом ходе ограничена скоростью схода гайки по винту.
Таким образом, возвратно-поступательное вертикальное перемещение винта за счет взаимодействующей с ним гайки преобразуется в одностороннее вращательное движение корпуса. Работоспособность этого устройства определяется цикличностью возвратно-поступательных движений. Поскольку возврат гайки по винту происходит за счет ее силы тяжести, то данная конструкция работает только в вертикальном положении, что и является ее основным недостатком: при любом другом пространственном расположении винтового механизма конструкция устройства значительно усложняется или вообще нет преобразования.
В основу изобретения положена задача разработать устройство, обеспечивающее расширение кинематических возможностей винтового механизма и упрощение преобразования.
Поставленная задача решается тем, что устройство для преобразования возвратно-поступательного перемещения в одностороннее вращательное в виде установленного в корпусе несамотормозящегося винтового механизма, включающего ведущее звено с узлом приложения осевой силы и ведомое звено, установленное с возможностью вращения вокруг своей оси, согласно изобретению снабжено дополнительным корпусом, по меньшей мере одним дополнительным ведущим звеном, связанным с дополнительным ведущим звеном и выполненным в виде втулки, шариками с наружными кольцами, при этом ведомое звено имеет по меньшей мере два участка с резьбой разного направления, причем оба узла приложения осевой силы ведущих звеньев установлены в дополнительном корпусе, соосно и зеркально друг относительно друга, торцевые поверхности каждого ведущего звена и соответствующего узла приложения осевой силы, обращенные одна к другой, выполнены фрикционными, на наружной поверхности каждого ведущего звена, расположенной параллельно его продольной оси, выполнены канавки с осевой разбивкой по числу шариков, а шарики с наружными кольцами расположены в соответствующих канавках, причем последние жестко закреплены в корпусе.
Целесообразно, чтобы узлы приложения осевой силы ведущих звеньев были жестко закреплены в корпусе, устройство было бы снабжено вторым дополнительным узлом приложения осевой силы, связанным с ведомым звеном, установленным с возможностью свободного вращения.
Устройство может быть снабжено механизмом для изменения осевой силы, связанным со вторым дополнительным узлом приложения осевой силы и выполненным либо в виде ширнирно-рычажной системы, либо в виде управляемого силового цилиндра.
Наличие этих отличительных новых признаков выявляет новые свойства предлагаемого устройства:
- связь ведущего звена с узлом приложения осевой силы обеспечивает одностороннее вращение ведомого звена под действием осевых сил с получением его инерционного вращения после прекращения воздействия этих сил и приводит к снижению потерь энергии при возврате ведущего звена в исходное положение;
- возможность преобразования возвратно-поступательного перемещения в одностороннее вращательное (при котором возврат ведущего звена в исходное положение для осуществления последующего преобразования производят принудительно, не оказывая существенного влияния на вращение ведомого звена) при любом пространственном расположении винтового механизма.
В конечном итоге предлагаемое изобретение позволит создавать всевозможные приводы в машиностроении и транспортных средствах с высоким КПД до 80-95%.
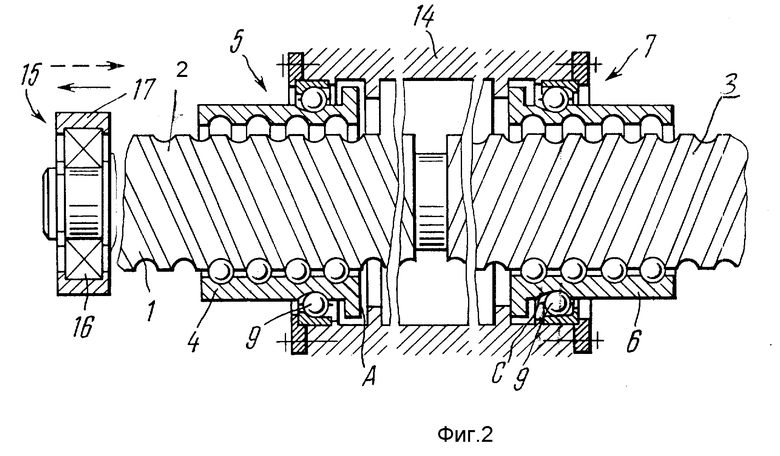
Фиг. 1 изображает конструкцию устройства для преобразования возвратно-поступательного движения в непрерывное одностороннее инерционное вращение ведомого звена, имеющего участки с резьбой разного направления, продольный разрез; на фиг. 2 - конструкция устройства для преобразования возвратно-поступательного движения в непрерывное возвратно-винтовое движение с односторонним вращением ведомого звена, продольный разрез; на фиг. 3 - один вариант выполнения механизма для изменения осевой силы в виде силового цилиндра; на фиг. 4 - другой вариант выполнения механизма для изменения осевой силы в виде шарнирно-рычажной системы; на фиг. 5 - третий вариант выполнения механизма для изменения осевой силы в виде шарнирно-рычажной системы с плавным изменением соотношений плеч рычага.
Предлагаемое устройство выполнено в виде несамотормозящегося винтового механизма, в качестве которого могут быть использованы винтовые передачи с малым трением скольжения или винтовые передачи качения. Для получения вращения ведомого звена с высокими скоростями и небольшими крутящими моментами предпочтительней использовать винтовые передачи, выполненные шарикоподшипниковыми, в которых гайка выполнена с кольцевыми канавками, при этом основной их недостаток - низкая кинематическая точность не сказывается на работоспособности устройства. Корпус такой гайки может быть выполнен очень легким, но при этом выдерживает значительные нагрузки.
Для получения непрерывного одностороннего вращения винтовой механизм содержит ведомое звено 1 (фиг. 1), которое имеет два участка 2 и 3 с резьбой разного направления, ведущее звено 4 в виде гайки с индивидуальным узлом 5 приложения осевой силы F и дополнительное ведущее звено 6 также с индивидуальным, аналогичным узлом 7 приложения осевой силы F. Узлы 5 и 7 жестко связаны между собой, соосно и зеркально друг относительно друга установлены в общем корпусе 8. Каждый из узлов 5 и 7 содержит установленные в корпусе 8 подшипники 9 качения, кольца которых имеют канавки с осевой разбивкой. Наружные кольца подшипников 9 установлены в корпусе 8 неподвижно, а их внутренними кольцами являются сами ведущие звенья 4 и 6 (поверхность "C"). Кроме того, каждый из узлов 5 и 7 имеет закрепленные в корпусе 8 цапфы 10 для его связи с приводом (на фиг. не показан), обеспечивающим возвратно-поступательное перемещение ведущих звеньев 4 и 6 во взаимопротивоположных направлениях по ведомому звену 1. Ведомое звено 1 установлено в корпусе 11 посредством подшипников 12 и связано с исполнительным органом 13.
Каждое ведущее звено 4 и 6 имеет выступ, торцевая поверхность "A" которого и обращенная к ней поверхность соответствующего узла 5 или 7 выполнены фрикционными.
С целью получения винтового движения ведомого звена 1 (фиг. 2) под действием осевой силы F целесообразно узлы 5 и 7 жестко закрепить на стойке 14, а ведомое звено 1 снабдить дополнительным узлом 15 приложения осевой силы, выполненным в виде подшипника 16, установленного в корпусе 17.
Устройство может быть снабжено механизмом для изменения осевой силой, который связан либо с узлами 5, 7 (фиг. 1), либо с дополнительным узлом 15 (фиг. 2) приложения осевой силы. Это позволяет изменять режим работы устройства, то есть бесступенчато регулировать крутящий момент и скорость вращения ведомого звена 1, что особенно необходимо при использовании предлагаемого устройства в транспортных средствах.
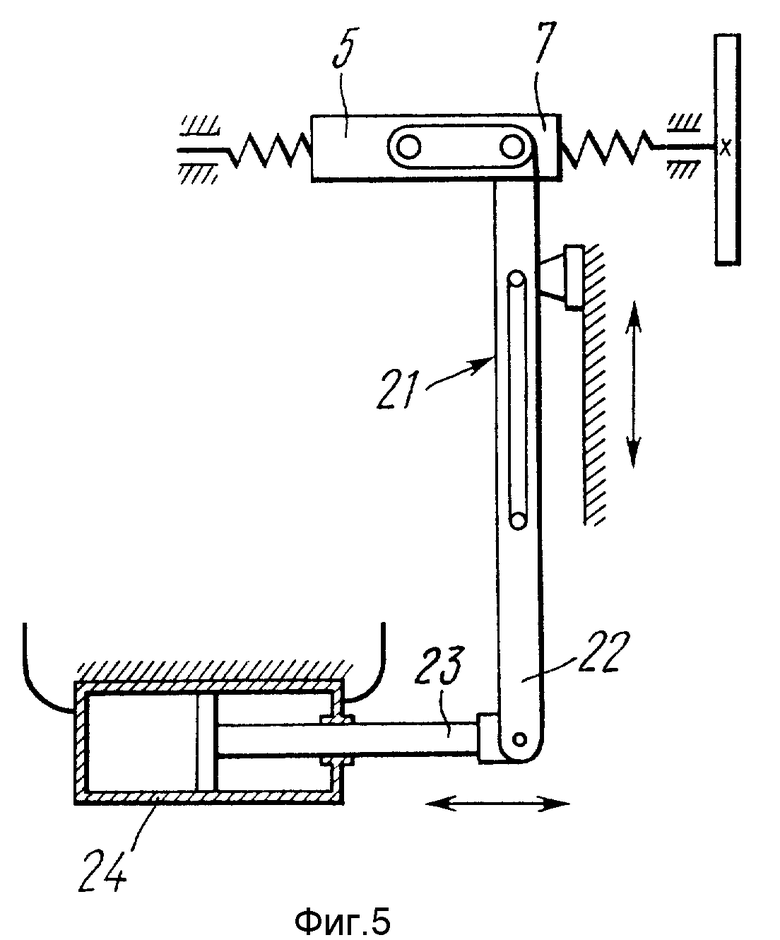
Механизм для изменения осевой силы может быть выполнен в виде либо управляемого силового цилиндра 18 (фиг. 3), либо в виде шарнирно-рычажной системы 19 (фиг. 4) с плавным изменением соотношений плеч рычага 20. Возможно выполнение механизма для изменения осевых сил в виде шарнирно-рычажной системы 21 (фиг. 5) с плавным изменением соотношений плеч рычага 22, который шарнирно связан с подвижным элементом, например штоком 23 силового привода 24.
Устройство преобразования возвратно-поступательного перемещения в одностороннее вращательное работает следующим образом.
Наличие на наружной поверхности ведомого звена 1 (фиг. 1) двух участков 2, 3 с резьбой разного направления в жесткое соединение узлов 5 и 7 ведущих звеньев 4 и 6 позволяет использовать воздействие одной осевой силы F, приводящее к совместному движению ведущих звеньев 4 и 6 в одном направлении, при котором одно из ведущих звеньев, например звено 6, застопорено и совершает поступательное движение, а другое, например звено 4, расстопорено и совершает винтовое движение. Это дает возможность разместить узлы 5 и 7 в общем корпусе 8, при этом количество подшипников 9 для создания "скользящих" поверхностей может быть сокращено до двух, а крепление их наружных колец может быть выполнено как у цанги.
Для получения винтового движения ведомого звена 1 (фиг. 2) осевой силой действуют непосредственно на него. В этом случае при движении в каждую сторону одно из ведущих звеньев, например звено 6, сообщает ведомому звену 1 вращательное движение, в то время как ведущее звено 4, взаимодействуя с корпусом 14 через подшипники 9 качения, свободно вращается, совершая относительное перемещение. Таким образом, ведомое звено 1 совершает возвратно-винтовое движение с односторонним вращением. Такое движение можно использовать в механизмах непосредственно или с помощью муфт качения использовать только его одностороннее вращение. После прекращения действия на ведомое звено 1 осевой силой оно может вращаться по инерции.
Во многих случаях требуется изменять параметры вращения ведомого звена 1. Эту задачу решают путем непосредственного силового регулирования, то есть изменяя величину силы. Для этого в предлагаемом устройстве используют механизм для изменения осевой силы, конструкции которого представлены на фиг. 3, 4, 5. При использовании управляемого силового привода 18 (фиг. 3) изменение силы осуществляют за счет изменения в нем давления рабочей среды, а за счет изменения расхода рабочей среды изменяют скорость вращения ведомого звена 1. При выполнении механизма в виде шарнирно-рычажной системы 19 (фиг. 4) изменение силы осуществляют за счет плавного изменения соотношения плеч рычага 20, выполненного, например, телескопическим. При недостаточной мощности силового цилиндра 24 (фиг. 5) для увеличения выигрыша в силе целесообразно дополнительно использовать шарнирно-рычажную систему 21, при этом ось вращения ее рычага 22 может плавно перемещаться с фиксацией в любом положении.
Различные варианты выполнения механизма для изменения осевой силы позволяют использовать предлагаемое устройство с различными приводами.


Устройство предназначено для преобразования возвратно-поступательного движения в одностороннее вращательное. Ведущее звено 4 винтового механизма связано с возможностью свободного осевого перемещения и свободного вращения с узлом 5 приложения осевых сил и взаимодействует с ним по фрикционной поверхности или через тела качения. Винтовой механизм имеет по меньшей мере одно дополнительное ведущее звено 6 с индивидуальным узлом 7, приложение осевой силы, а ведомое звено 1 имеет по меньшей мере два участка 2 и 3 с резьбой разного направления, предназначенных для одновременного перемещения ведущих звеньев 4 и 6 в одну сторону. Величину воздействующей осевой силы выбирают так, что реактивный момент инерции звена меньше статического и динамического момента инерции ведомого звена 1. Устройство позволяет получать непрерывное одностороннее вращение с возможностью инерционного вращения ведомого звена 1, винта или гайки. Для получения возвратно-винтового движения с односторонним вращением ведомого звена 1 узлы 5, 7 приложения осевой силы ведущих звеньев жестко закреплены на стойке 14, а ведомое звено 1 снабжено дополнительным узлом 15 приложения осевой силы, а само устройство снабжено механизмом для изменения осевой силы, которое выполнено в виде шарнирно-рычажной системы или в виде управляемого силового цилиндра. 3 з.п. ф-лы, 5 ил.
| Юла | |||
| Детский волчок | |||
| Регенеративный приемник | 1923 |
|
SU490A1 |
