Настоящее изобретение относится к технике сообщения объекту вращательного движения, а более конкретно к адаптационному преобразователю механических движений. Предлагаемое изобретение может быть использовано во многих областях механики. Наилучшее применение оно найдет в качестве преобразователей мускульных движений в транспортных средствах, а именно в велосипедах, веломобилях инвалидных колясках, в автомобилях, тренажерах, в аттракционах, в водных и воздушных транспортных средствах и так далее. В энергетике предлагаемое изобретение может быть использовано, в первую очередь, как преобразователи в волновых, ветровых и приливных электростанциях.
Известен привод мускульного транспортного средства (PCT/RU 95/00062), содержащий коаксиально установленные винтовые передачи, одна из которых является преобразующей движение и содержит по меньшей мере одно ведущее звено и связанное с ним через тела качения одно ведомое звено, установленное с возможностью вращения вокруг своей оси и связанное с исполнительным механизмом. Другая винтовая передача является приводной, служит механизмом создания осевой силы и обеспечивает создание крутящего момента. Приводная передача содержит по меньшей мере одно приводное звено и одно опорное звено, связанные между собой посредством тел качения, при этом приводное звено установлено с возможностью взаимодействия с ведущим и ведомым звеньями преобразующей винтовой передачи и соединено с узлом приложения и изменения осевой силы. В качестве узла приложения используется рычаг с изменяемой длиной плеча и/или рычажная система.
Преобразователь такого типа может работать и как мультипликатор, и как редуктор, изменять плавно по необходимому закону или многоступенчато в широких диапазонах одновременно все параметры и характеристики механического движения - скорость, крутящий момент, а главное, ускорение ведомого звена с автоматическим созданием инерционного вращения. Этот преобразователь может работать как при жестких, так и при свободных кинематических связях: свободно изменять амплитуду, частоту и диапазон приводных движений.
Известный привод недостаточно хорошо приспособлен для эффективной передачи мускульной энергии человека: для изменения параметров движения в нем используются дополнительные средства или устройства, требующие переключений в процессе работы, отвлечения внимания человека, что может привести к аварийной ситуации.
В основу настоящего изобретения положена задача создания адаптационного шариковинтового привода, обеспечивающего выбор необходимых силовых режимов работы привода с наивысшим кпд передачи мускульной энергии от человека на привод при изменяющихся условиях движения за счет обеспечения свободного и быстрого перемещения приводных рычагов и/или изменения направления действующих на них сил.
Поставленная задача решается тем, что в адаптационном шариковинтовой приводе, содержащем коаксиально установленные винтовые передачи, две из которых являются преобразующими движение и содержат ведущие звенья и связанные с ними через тела качения ведомые звенья, одни из которых выполнены с винтовыми канавками, а другие - с кольцевыми канавками, при этом ведомые звенья жестко связаны между собой и со ступицей колеса транспортного средства, установлены с возможностью вращения вокруг своей оси и связаны с рамой транспортного средства, а две другие винтовые передачи с приводными рычагами, являющиеся приводными и служащие механизмом создания осевой силы и обеспечивающие создание крутящего момента и ускорения, содержат два приводных звена и два опорных звена, попарно связанных между собой посредством тел качения, а приводные звенья установлены с возможностью взаимодействия с ведущими звеньями преобразующих винтовых передач по поверхностям с трением качения и/или скольжения, согласно изобретению приводные звенья связаны между собой с возможностью совместного движения, а опорные звенья связаны с приводными рычагами и установлены с возможностью поворота относительно оси привода и друг друга.
Такая конструкция позволяет передавать мускульную энергию человека на привод с максимальным кпд, обеспечивает равномерное или ускоренное вращение ведомого звена под действием постоянных и/или непрерывно изменяющихся в каждом цикле движущих сил. При действии на приводные рычаги разнонаправленными силами происходит преобразование возвратно-поступательного движения в одностороннее вращательное, при действии на оба рычага силами одного направления происходит свободное перемещение их из одного режима (диапазона) движений в другой, при этом оно не влияет на инерционное вращение. Режимы движений характеризуются либо получением максимальных крутящих моментов (за счет работы при наибольшем плече рычага), либо получением высоких скоростей вращения ведомого звена (за счет значительного угла поворота рычага). Это позволяет при постоянной длине рычага избежать излишних движений ног или рук, плавно переходить из режима с повышенными крутящими моментами в режим с повышенной скоростью вращения и при необходимости свободно перемещать рычаги в режим с необходимыми техническими характеристиками при оптимальной работе мускульных сил.
Приводные звенья могут быть установлены с возможностью совместного вращательного движения и/или возвратно-поступательного движения. Кроме быстрой смены режимов работы привода это дает возможность создания и передачи повышенных крутящих моментов непосредственно на ведомые звенья.
Приводные звенья, имеющие резьбы разного направления, могут быть связаны между собой жестко, а опорные звенья, имеющие резьбы, соответствующие резьбам приводных звеньев, установлены на связанной с рамой общей оси с возможностью поворота и жестко связаны с приводными рычагами. Это позволяет использовать транспортные средства с рамами пониженной жесткости и более легкими.
Опорные звенья, связанные между собой подшипниковой осью с телами качения, а с рамой транспортного средства - через подшипники качения позволяют всем реакциям от усилий приводных сил замыкаться в подшипниковой оси и не передаваться на раму транспортного средства.
Приводные винтовые передачи могут быть выполнены с трением скольжения, а ведомые звенья выполнены составными. Это исключает необходимость применения дополнительных деталей и сложной механической обработки и дает возможность использовать в качестве ступицы винтовые ведомые звенья простой конструкции.
В одном из вариантов привода опорные звенья связаны через подшипниковое соединение с рамой транспортного средства, расположенной между ведомыми звеньями и приводными рычагами. Это дает возможность использовать предлагаемый привод в транспортных средствах различных конструктивных модификаций и герметично изолировать колеса кожухом, не мешающим работе ног или рук.
Связь между приводными звеньями осуществляется посредством зубчатого или шлицевого соединения и крепежных элементов. Это обеспечивает более технологичное изготовление данных деталей при крупносерийном и массовом производстве.
Приводные и ведущие звенья могут быть установлены с возможностью взаимодействия между собой по поверхностям с трением скольжения, благодаря чему исключаются дополнительные связи между ними, что упрощает конструкцию привода.
Связь между приводными звеньями может быть осуществлена посредством блокирующих зацепов, обеспечивающих между ними жесткую связь без дополнительных связующих элементов и точную центровку. Кроме того, такая разновидность жесткого крепления приводных звеньев сокращает время сборки привода и позволяет автоматизировать данный процесс.
Приводные звенья могут быть связаны между собой посредством сварки, при этом приводные и ведущие звенья взаимодействуют между собой по поверхностям с трением качения и скольжения с возможностью регулировки зазора между указанными поверхностями. Благодаря этому появляется возможность достичь минимальных зазоров при обеспечении работоспособности привода. Кроме того, это обеспечивает наивысшую производительность при изготовлении привода.
В одном из вариантов выполнения привода каждое опорное звено охватывает соответствующее ведомое звено и установлено с возможностью поворота в корпусе, в котором размещены с возможностью вращения ведомые звенья, жестко связанные со ступицей колеса посредством общего вала. Такая конструкция привода может быть использована в разнообразных конструкциях транспортных средств, в которых колеса или другие исполнительные механизмы связаны общим валом.
Для обеспечения возможности регулировать натяг между звеньями при их жесткой связи приводные звенья жестко связаны между собой и ведомые звенья связаны между собой посредством торцевых шлицевых соединений и резьбовой муфты.
Приводные звенья могут быть выполнены как единое целое с возможностью взаимодействия по поверхностям с трением скольжения с ведущими звеньями, связанными между собой наружным шарикоподшипниковым соединением, при этом ведомые и опорные звенья установлены в корпусе, выполненным за одно целое с рамой. Это придает дополнительную жесткость приводу без использования связующей оси.
Корпус транспортного средства может быть выполнен сборным, что дает возможность применения основных звеньев привода цельными.
Приводные рычаги могут быть закреплены по центру привода к жестко соединенным опорным звеньям, служащим осью, на которой с возможностью свободного инерционного вращения при малом радиусе вращения установлены раздельно друг от друга ведомые звенья. В этом случае качательное движение рычагов может быть преобразовано в два независимые друг от друга вращательные движения ведомых звеньев с различными характеристиками.
Ведущие и приводные звенья могут быть установлены с возможностью взаимодействия по их поверхностям с трением качения и скольжения с регулированием зазоров между указанными поверхностями посредством перемещения рамы привода, жестко связанной с приводными звеньями. Это позволяет изготавливать детали со свободными допусками в осевом направлении (большой интервал регулировки осевых зазоров).
Для значительного снижения удельных нагрузок на шарики при передаче значительных крутящих моментов приводные рычаги связаны дополнительно с ведомыми звеньями посредством упорных шарикоподшипников, а ведомые звенья и опорная ось защищены подвижным кожухом. Кроме того, это дает возможность обеспечить герметичность привода в целом простыми средствами.
Приводные звенья могут быть связаны между собой жестко посредством промежуточного звена, которое связано с ползушкой, установленной на оси с возможностью поступательного движения, при этом ось выполнена разрезной и связана с рамой, а опорные звенья, которые установлены на ней, связаны с приводными рычагами. Такая конструкция привода обеспечивает сложение различных усилий от приводных рычагов и предполагает независимую работу каждым из них при создании непрерывного крутящего момента.
С целью обеспечения высокого кпд при относительном малом количестве деталей приводные звенья выполнены как единое целое, связаны с опорными звеньями, выполненными за одно целое с приводными рычагами, установленными в корпусе рамы, связанном через подшипниковое соединение с ведомыми звеньями, выполненными как единое целое.
Связь приводных звеньев с опорными звеньями может быть осуществлена через резьбу скольжения. При этом каждое звено привода многофункционально, что приводит к наименьшему количеству деталей, а применение суперсмазок обеспечит достаточно высокий кпд привода.
Приводные звенья могут быть связаны между собой жестко посредством шлицев, винта и гайки и установлены с возможностью взаимодействия с ведущими звеньями, при этом опорные звенья выполнены за одно целое с рычагами. Такие конструктивные изменения направлены на совершенствование технологических процессов механической обработки и сборки.
Приводные звенья могут быть установлены с возможностью взаимодействия между собой через тела качения, заключенные в сепаратор, выполненный в виде подвижной втулки. Независимая работа каждым приводным рычагом по преобразованию возвратно-винтового движения во вращательное в одну сторону совмещается с возможной синхронизацией приводных движений от однонаправленных сил и при необходимости суммировании разнонаправленных сил с сохранением синхронности движений.
Для равной прочности передач привода взаимодействующие между собой звенья приводных и преобразующих винтовых передач имеют по существу один и тот же диаметральный размер звеньев.
В одном из вариантов выполнения привода опорные звенья выполнены за одно целое с приводными рычагами и имеют на внутренних поверхностях шлицы качения, через которые они связаны с приводными звеньями, которые установлены с возможностью взаимодействия между собой через тела качения и связаны своими внутренними резьбами качения с соответствующими резьбами оси привода. Такая конструкция привода обеспечивает возвратно-качательные движения приводных рычагов с синхронизацией движений от действий толкающих сил и/или сил тяжести без применения промежуточных звеньев.
Если привод дополнительно снабдить поворотными звеньями, взаимодействующими посредством шлиц качения с приводными звеньями, при этом опорные звенья связать друг с другом жестко и неподвижно относительно корпуса транспортного средства, а каждое приводное звено связать со своим ведущим звеном через поверхности с трением качения и скольжения, то получаем привод, в котором возвратно-качательные движения сначала преобразуются в возвратно-винтовые, а затем в одностороннее вращательное с инерционным эффектом.
Приводные звенья могут быть установлены с возможностью совместного вращательного движения и/или возвратно-поступательного движения во взаимно противоположных направлениях. Это позволяет использовать большое количество вариантов адаптационной работы привода.
На сопрягаемых поверхностях приводных и опорных звеньев могут быть выполнены одноименные резьбы, а приводные звенья могут быть связаны между собой посредством подвижного соединения, обеспечивающего возвратно-поступательное перемещение друг относительно друга во взаимно противоположных направлениях, и, кроме того, на поверхностях ведущих и/или ведомых звеньев могут быть выполнены одноименные резьбы. В таком варианте можно иметь одно цельное ведомое звено с одноименной резьбой, а номенклатуру используемых деталей сократить вдвое (например, за счет возможности использования одноименных резьб в приводных винтовых парах).
В одном из вариантов выполнения привод снабжен поворотными и промежуточными звеньями, причем промежуточные звенья установлены между ведущими и опорными звеньями с возможностью взаимодействия с ведущими звеньями по поверхностям с трением скольжения и качения, при этом каждое из промежуточных звеньев жестко связано с соответствующим приводным звеном, имеющим на внутренней и наружной поверхностях винтовые и шлицевые канавки для взаимодействия через тела качения с опорным и поворотным звеньями, а каждое поворотное звено установлено внутри соответствующего опорного звена, с которым оно связано шарикоподшипниковым соединением, причем поворотные звенья связаны с приводными рычагами и между собой шарикоподшипниковым соединением и установлены с возможностью поворота относительно друг друга и опорных звеньев, которые связаны с рамой транспортного средства.
В таком приводе изменение вариантов адаптационной работы возможно осуществлять за счет изменения взаимодействия промежуточных звеньев.
Если промежуточные звенья связаны между собой шарикоподшипниковым соединением, то работа приводных рычагов полностью синхронизирована и все адаптационные свойства будут направлены на увеличение преимуществ, имеющихся в таком виде движений. Кольцо шарикоподшипникового соединения с двух сторон может быть использовано для взаимодействия с ведущими звеньями через шарики.
Промежуточные звенья могут быть установлены с возможностью одностороннего взаимодействия между собой через тела качения. Такое взаимодействие обеспечивает суммирование действующих приводных сил, а при необходимости и синхронизацию приводных движений, при этом независимое двухстороннее воздействие на каждый приводной рычаг в течение движения до половины максимальной его траектории создает наиболее благоприятные адаптационные режимы работы.
Промежуточные звенья могут быть установлены с возможностью взаимодействия между собой через тела качения и пружину сжатия. Такое взаимодействие обеспечивает самый широкий круг адаптационных свойств и, кроме того, под действием пружины приводные рычаги автоматически возвращаются в начальные положения силовых режимов, что гарантирует получение наивысших крутящих моментов и ускорений в нужный момент.
Промежуточные звенья могут быть также установлены с возможностью взаимодействия между собой через поверхности с трением скольжения. При независимой работе каждой педалью с туклипсой (на рычаг действуют и тянущие, и толкающие силы), когда не нужно синхронизировать движения, такое взаимодействие будет происходить при одностороннем действии на оба рычага, когда их используют в качестве опоры.
Кроме того, промежуточные звенья могут быть установлены с возможностью взаимодействия между собой по поверхностям скольжения или через тела качения и взаимодействия с ведущими звеньями по поверхностям с трением скольжения и/или качения.
Различные варианты взаимодействия промежуточных звеньев обеспечивают изменение адаптационных свойств привода (возможность торможения, использование в качестве опоры).
Промежуточные звенья могут быть установлены с возможностью взаимодействия между собой через упругодеформируемые тела качения, заключенные в сепаратор, перемещающийся по внутренней поверхности ведомых звеньев, и, кроме того, каждое промежуточное звено связано с соответствующим ведущим звеном с возможностью взаимодействия по поверхностям с трением качения и скольжения. Это приводит к возможности односторонней синхронизации приводных движений и торможения под действием односторонних сил.
Промежуточные звенья могут быть связаны с ведущими звеньями через шарики с сепараторами с возможностью взаимодействия по поверхностям с трением скольжения или качения и имеют на внутренних поверхностях винтовые и шлицевые канавки, через которые посредством шариков они связаны с наружными винтовыми канавками опорных звеньев и наружными шлицевыми канавками поворотных звеньев, при этом промежуточные звенья установлены с возможностью взаимодействия между собой по поверхностям с трением скольжения.
В варианте, когда промежуточные звенья двигаются возвратно-поступательно для синхронизации движения и использования рычагов в качестве опоры при обеспечении свободного (инерционного) вращения ведомого звена, промежуточные звенья могут взаимодействовать между собой через поверхности с трением скольжения.
Ведущие звенья могут быть установлены с возможностью взаимодействия между собой по поверхностям с трением скольжения. Независимые преобразующие движения при таком взаимодействии могут обеспечить надежное торможение ведомых звеньев до полной остановки.
В случае, когда промежуточные звенья установлены с возможностью взаимодействия между собой через тела качения, синхронизацию движений от односторонних сил можно осуществлять при различных движениях промежуточных звеньев (возвратно-винтовых или возвратно-поступательных).
Установка промежуточных звеньев с возможностью взаимодействия между собой через пружину сжатия обеспечивает возможность свободного независимого перемещения приводных рычагов в течение всего хода приводных звеньев, при этом на приводные рычаги всегда действует крутящий момент, возвращающий их в исходное положение.
Промежуточные звенья могут быть установлены с возможностью взаимодействия между собой через пружину сжатия и тела качения. Это дает возможность осуществлять независимые перемещения приводных рычагов до половины их хода с последующей синхронизацией движений в течение всего полного хода от однонаправленных, поочередно действующих сил, при этом в любой момент времени рычаги могут вернуться в исходное положение.
Установка промежуточных звеньев с возможностью взаимодействия между собой через шарикоподшипниковое соединение приводит к полной синхронизации движений приводных рычагов, причем на каждый рычаг можно действовать разнонаправленными силами с использованием силы тяжести, при этом использовать приводные рычаги в качестве опоры.
Приводные звенья могут быть жестко соединены с промежуточными звеньями, установленными с возможностью возвратно-поступательного перемещения относительно оси привода и взаимодействия между собой. В этом случае два независимых возвратно-качательных движения поворотных звеньев преобразуются в возвратно-поступательные приводных звеньев с возможной синхронизацией от односторонних сил, которое через ведущие звенья преобразуется в непрерывное инерционное вращательное движение ведомых звеньев.
Для преобразования движения только под действием однонаправленных сил, создающих наибольшие крутящие моменты и ускорения, приводные звенья выполнены за одно целое с промежуточными звеньями и дополнительно взаимодействуют через упругий элемент.
Опорные звенья могут быть жестко связаны с рамой, а приводные рычаги жестко связаны с осью привода, при этом в приводных винтовых парах выполнена одноименная резьба. В этом случае возвратно-качательное движение рычагов и осей преобразуется во возвратно-винтовые движения приводных звеньев, которые с помощью ведущих звеньев преобразуется в непрерывное инерционное вращение ведомых звеньев.
Опорные звенья могут быть жестко связаны с рамой, ось привода выполнена составной, с каждой частью которой жестко связан соответствующий приводной рычаг, при этом части оси установлены с возможностью поворота друг относительно друга, а промежуточные звенья установлены с возможностью взаимодействия между собой через пружину. В такой конструкции независимые движения приводных рычагов будут осуществляться в течение всего полного их хода, включая силовую, среднюю и скоростную зоны, а промежуточные звенья многофункциональны.
Промежуточные звенья могут быть установлены с возможностью взаимодействия между собой и с соответствующими опорными звеньями через пружины сжатия, в результате чего промежуточные звенья возвращаются в исходное положение более мягко (безударно).
Для снижения диаметральных размеров привода и достижения высокой производительности сборки привода промежуточные звенья устанавливают между опорными звеньями в осевом направлении.
Промежуточные звенья могут быть жестко связаны с приводными звеньями, внутри которых они расположены в осевом направлении. Такая конструкция позволяет использовать стандартные подшипниковые изделия и преобразовывать два возвратно-винтовых движения в непрерывное инерционное вращательное.
В одном из вариантов выполнения привода опорные звенья выполнены в виде полуосей, связанных между собой и рамой транспортного средства жестко, при этом по центру указанных полуосей с возможностью свободного вращения установлены ведомые звенья, выполненные за одно целое с минимальным радиусом вращения, а приводные звенья связаны через шарики с опорными звеньями с возможностью регулировки осевого люфта и жестко связаны с приводными рычагами. Такая конструкция позволяет выполнять ведомое звено цельным с минимальным радиусом качения, что приводит к увеличению свободного выбега и снизить до минимума радиальные люфты.
Приводные звенья могут быть жестко связаны с приводными рычагами через регулировочные гайки, а кожухи установлены с возможностью перемещения вдоль ведомых и опорных звеньев. Это позволяет осуществлять независимые и одновременные преобразования в течение всего хода приводных рычагов, педали которых должны иметь туклипсы, при этом задача герметизации привода решается просто.
Для преобразования двух независимых возвратно-винтовых движений в непрерывное инерционное вращение с возможностью торможения в нижнем положении рычагов ведомые звенья целесообразно выполнять составными, а кожухи располагать между рамой и приводными рычагами и выполнять их упругодеформируемыми.
Опорные звенья могут быть жестко связаны с рамой по центру привода, а ведомые звенья, жестко связанные с колесами, установлены между приводными и ведущими звеньями. Такой привод преобразует два независимых возвратно-винтовых движения в два независимых инерционных вращения с возможностью торможения рычагами в верхнем положении после совершения холостого хода, при этом торможение можно осуществлять в любой момент времени.
Приводные рычаги могут быть установлены с возможностью осевого перемещения относительно приводных звеньев с последующей фиксацией, что обеспечивает регулировку зазоров. Конструкция такого привода проста и эффективна за счет многофункционального назначения каждой детали и возможности изменения адаптационных свойств и характеристик привода.
Приводные звенья могут быть жестко связаны между собой посредством торцевых зубьев и резьбовой гайки, взаимодействующей с ведущими звеньями через тела качения с сепараторами. Такая компоновка привода сделает его одним из самых массовых благодаря адаптационным свойствам, позволяющим применять привод практически во всех мускульных транспортных средствах, а также небольшого веса, рациональных и высокопроизводительных технологий изготовления.
Промежуточные звенья могут быть установлены между ведущими и опорными звеньями в осевом направлении. Адаптационные свойства такого привода распространяются не только на преобразование движения, но и на процесс торможения, независимое движение каждого рычага распространяется только на холостой ход.
Промежуточные звенья могут быть установлены с возможностью взаимодействия с приводными звеньями по поверхностям с трением скольжения. Правильным подбором конусных поверхностей (углов конусов) возможно добиться работоспособности привода, приводные движения в котором должны строго сочетаться с холостыми как для преобразования движения, так и для осуществления торможения.
В одном из вариантов выполнения привода ведомые звенья выполнены за одно целое и являются общей осью привода. При этом другие детали привода также просты и технологичны, рассчитаны на массовое производство, а работа привода благодаря его адаптационным свойствам настолько эффективна, что позволяет повысить кпд передачи мускульной энергии человека на механизм до 90-98%, что и является главной задачей изобретения.
В дальнейшем предлагаемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами, на которых:
фиг.1 изображает общий вид адаптационного шариковинтового привода согласно изобретению;
фиг.2 - привод, в котором приводные звенья взаимодействуют с ведущими звеньями по поверхностям с трением скольжения;
фиг.3 - привод со сборным ведомым звеном;
фиг.4 - привод, в котором приводные рычаги находятся снаружи рамы, с которой они образуют шарикоподшипниковое соединение;
фиг.5 - привод, аналогичный изображенному на фиг.2, при этом приводные звенья связаны между собой жестко шлицами;
фиг.6 - привод, с регулируемым зазором между поверхностями с трением скольжения и качения ведущего звена, а приводные звенья соединены жестко с помощью сварки;
фиг.7 - привод, ведомые звенья которого связаны с общим валом;
фиг.8 - привод, ведомые и приводные звенья которого жестко связаны торцевыми шлицами и винтовыми втулками;
фиг.9 - привод с ведущими звеньями, связанными наружным шарикоподшипниковым соединением;
фиг.10 - привод, точность взаимного расположения звеньев которого обеспечена сборным корпусом;
фиг.11 - привод с центральным расположением приводного рычага и с ведомыми звеньями, скорость вращения которых может быть различной;
фиг.12 - то же, но с регулировкой осевых зазоров;
фиг.13 - привод с центральным расположением приводных рычагов и защитными кожухами постоянной формы;
фиг.14 - привод, в котором приводные и поворотные звенья связаны между собой посредством ползушки и дискового кольца;
фиг.15 - привод со звеньями простейших форм;
фиг.16 - привод, ведомые и приводные звенья которого выполнены как единое целое;
фиг.17 - привод, приводные звенья которого выполнены с метрической резьбой;
фиг.18 - привод, сепаратор которого между приводными звеньями выполнен в виде втулки скольжения;
фиг.19 - привод с приводными звеньями, усиленными трубной осью со стандартными подшипниками;
фиг.20 - привод, внутренняя поверхность приводных рычагов которого выполнена со шлицами качения;
фиг.21 - привод с поворотными звеньями, взаимодействующими с приводной винтовой передачей;
фиг.22 - привод, в котором приводные звенья совершают взаимопротивоположные возвратно-поступательные движения, а преобразующие и приводные винтовые пары имеют одноименную резьбу;
фиг.23 - привод, в котором промежуточные звенья жестко прикреплены к приводным звеньям;
фиг.24 - промежуточные звенья, взаимодействующие через подшипники качения (фрагмент);
фиг.25 - промежуточные звенья, взаимодействующие через подшипники качения и пружину сжатия (фрагмент);
фиг.26 - привод, позволяющий синхронизировать движения приводных рычагов и осуществлять торможение;
фиг.27 - привод с независимыми движениями приводных звеньев, а при действии на оба приводных рычага однонаправленными силами можно осуществлять торможение;
фиг.28 - привод, позволяющий осуществлять независимые и синхронизированные движения приводными рычагами;
фиг.29 - то же, но при автоматическом перемещении приводных рычагов в верхнее положение;
фиг.30 - привод с полностью синхронизированными движениями приводных рычагов, позволяющий суммировать разнонаправленные усилия;
фиг.31 - привод, в котором приводные звенья выполнены за одно целое с ползушками, перемещающимися относительно оси и взаимодействующими между собой через пружину сжатия;
фиг.32 - привод, в котором приводные звенья жестко связаны с ползушками, совершающими возвратно-поступательное движение относительно оси;
фиг.33 - привод, приводные звенья которого жестко связаны с промежуточными звеньями и установлены с возможностью взаимодействия между собой через пружину сжатия и взаимодействия через пружину с опорными звеньями;
фиг.34 - привод с улучшенной технологией сборки;
фиг.35 - привод с возвратно-винтовыми движениями приводных рычагов;
фиг.36 - привод с ведомыми звеньями, выполненными как единое целое;
фиг.37 - привод, обеспечивающий минимально возможный радиус качения;
фиг.38 - привод с регулируемыми зазорами между поверхностями с трением скольжения и качения и коническими кожухами;
фиг.39 - привод с расположением ведомого звена между ведущим и приводным звеньями и центральным расположением приводного рычага;
фиг.40 - привод с раздельными защитными кожухами;
фиг.41 - привод с улучшенными адаптационными свойствами, в котором натяг в приводных звеньях обеспечен торцевыми зубьями и резьбовой муфтой;
фиг.42 - привод с повышенными скоростными характеристиками при сокращении осевых размеров;
фиг.43 - привод с промежуточными звеньями, взаимодействующими с приводными звеньями по поверхностям с трением скольжения;
фиг.44 - привод, жесткость которого обеспечивает ведомое звено;
фиг.45 - схему силового режима работы привода;
фиг.46 - схему среднего режима работы привода;
фиг.47 - схему скоростного режима работы привода.
Адаптационный шариковинтовой привод согласно изобретению содержит коаксиально установленные в корпусе 1 (фиг.1) транспортного средства винтовые передачи. Наружная, преобразующая движение винтовая передача содержит два ведущих звена 2 и 3 в виде винтов с многозаходными резьбовыми канавками 4, посредством которых они связаны через шарики 5 с сепараторами 6 через кольцевые канавки с двумя ведомыми звеньями 7 и 8 в виде гаек, жестко связанных между собой. Внутренняя приводная винтовая передача содержит два приводных звена 9 и 10, выполненных в виде гаек, жестко связанных друг с другом, например посредством сварки или выполненных как единое целое, и имеющих многозаходные резьбы одноименного или противоположного направления (левую и правую). Приводная винтовая передача содержит также два соосно установленных друг относительно друга опорных звена 11 и 12 в виде винтов, связанных с приводными звеньями 9 и 10 через тела качения в виде шариков 13. Опорные звенья 11 и 12 посредством шариков 14 с сепараторов 15 образуют с осью 16 шарикоподшипниковые соединения и жестко связаны с рычагами 17 и 18, например шлицевыми соединениями, при этом опорные звенья 11 и 12 установлены с возможностью свободного поворота друг относительно друга и оси 16. Ось 16 с помощью цапф 19 связана с корпусом 1 (или с рамой). Кроме того, опорные звенья 11 и 12 образуют за счет шариков 20 с сепараторами 21 шарикоподшипниковые соединения с ведомыми звеньями 7 и 8, которые жестко связаны с колесом (не показано) с помощью крепежных элементов (винтов, шпилек, штифтов). Приводные звенья 9 и 10 через шарики 22 с сепараторами 23 связаны с ведущими звеньями 2 и 3, установленными с возможностью взаимодействия с ними либо через шарики 22, либо через конические поверхности 24.
На фиг.2 представлен вариант выполнения привода, в котором ведущие звенья 25 и 26 (винты) преобразующей винтовой передачи установлены с возможностью взаимодействия друг с другом через торцевые канавки посредством шариков 27, расположенных в сепараторах 28. Каждое ведущее звено 25 и 26 через коническую поверхность взаимодействует с соответствующим приводным звеном 29 и 30 (гайкой), при этом приводные звенья 29 и 30 связаны друг с другом посредством штифтов 31, как показано на фиг.2, а также с опорными звеньями 32 и 33 через шарики 34. Приводные звенья 29 и 30 должны быть жестко связаны друг с другом с применением “холодной сварки” или с помощью полимеризирующихся составов типа “LOCTITE 620”.
Опорные звенья 32 и 33 взаимодействуют посредством шариков 35 и сепараторов 36 с осью 37. В приводных и опорных звеньях 29, 30 и 32, 33 соответственно установлены кольца 38 и связанные с ними разнообразные упорные элементы, предотвращающие расположенные между ними шарики 34 от выпадения. Опорные звенья 32 и 33 образуют с кольцами 39 и 40 посредством шариков 41 и сепараторов 42 шарикоподшипниковые соединения, через которые они связаны с корпусом 43 транспортного средства.
Ведомые звенья 44 и 45 в виде гаек жестко связаны между собой и колесом (не показано) и образуют с опорными звеньями 32 и 33 шарикоподшипниковые соединения, при этом каждое ведомое звено 44 и 45 имеет по две кольцевые канавки, через которые они посредством шариков 46 и сепараторов 47 связаны с ведущими звеньями 25 и 26.
Опорные звенья 32 и 33 в данном случае посредством шлицевых осей 48 и винтов 49 жестко связаны с рычагами 50, каждый из которых может быть связан с педалями для ног или рукоятями для рук разнообразных конструкций.
На фиг.3 представлен вариант выполнения привода, в котором приводные винтовые передачи выполнены с трением скольжения. Приводные передачи содержат опорные звенья 51 и 52 и приводные звенья 53 54, выполненные как единое целое. Ведомые звенья 55 и 56 выполнены составными с помощью резьбовой муфты 57 и кольцевых дисков 58 и крепежных элементов. С приводными звеньями 53 и 54 с помощью шарикоподшипниковых соединений 59 связаны ведущие звенья 60 и 61.
Отличительной особенностью привода, представленного на фиг.4, является то, что приводные звенья 62 и 63 связаны друг с другом посредством торцевых зубьев и скреплены винтами 64 (или шпильками), что является более технологичным при изготовлении приводов в крупносерийном производстве. Связь привода с рамой 65 транспортного средства осуществляется, например, через шарикоподшипниковое соединение 66 для создания вокруг колеса герметичного кожуха. Опорные звенья 67 и 68 связаны через шарикоподшипниковое соединение 66 с рамой 65, расположенной между ведомыми звеньями 69 и 70 и приводными рычагами 71 и 72.
Привод, показанный на фиг.5, аналогичен приводу, представленному на фиг.2, с тем лишь отличием, что приводные звенья 73 и 74 (гайки) имеют на своих, обращенных друг к другу торцевых поверхностях зубья или шлицы, по которым они сопряжены друг с другом (без люфта или с небольшим люфтом) с возможностью передачи от одного звена к другому крутящего момента. Приводные звенья 73 и 74 и ведущие звенья 75 и 76 установлены друг относительно друга так, что между их коническими сопрягаемыми поверхностями образованы зазоры от 0,1 до 0,4 мм, необходимые для обеспечения работоспособности привода. Приводные звенья 73 и 74 связаны между собой жестко с помощью блокирующих зацепов 77. Такое исполнение соединения приводных звеньев 73 и 74 при массовом производстве привода более технологично как при механической обработке деталей, так и при сборке привода. При массовом производстве приводов ведомые звенья 78 и 79 (гайки) целесообразно изготавливать сборными.
В приводе, показанном на фиг.6, ведомые звенья 80 и 81 в виде гаек, каждая из которых имеет от 1 до 3-4 и более подшипниковых кольцевых канавок, связаны между собой жестко и образуют с опорными звеньями 82 и 83 шарикоподшипниковые соединения посредством шариков 84 и сепараторов 85. Ведущие звенья 86 и 87 (винты) могут быть трех-десяти и более заходными. На пересечениях винтовых канавок ведущих звеньев 86 и 87 и радиальных канавок гаек 80 и 81 размещены шарики 88 и при необходимости (в зависимости от точности изготовления винтовой преобразующей пары) сепараторы 89.
Приводные звенья 90 и 91 (гайки) могут иметь одноименные или разноименные резьбы (левая-правая, левая-левая, правая-правая), установлены друг относительно друга с высокой точностью и соединены жестко сваркой или пайкой. Приводные звенья 90 и 91 могут взаимодействовать с ведущими звеньями 86 и 87 не только своими центральными частями, но и противолежащими торцами через шарики 92, размещенные в сепараторах 93, и подшипниковые кольца 94, зафиксированные с помощью колец 95.
Опорные звенья 82 и 83 образуют посредством шариков 96 и сепараторов 97 шарикоподшипниковые соединения с осью 98, при этом в раму или корпус транспортного средства они устанавливаются посредством шарикоподшипниковых соединений, образованных кольцами 99, шариками 100 и сепараторами 101. Кроме того, опорные звенья 82 и 83 жестко скреплены с педалями или рычагами 102 с помощью шлицевых втулок 103 и винтов 104. Приводные звенья 90 и 91 связаны между собой посредством сварки, при этом приводные звенья 90 и 91 и ведущие звенья 86 и 87 установлены с возможностью взаимодействия между собой по поверхностям с трением качения и скольжения и с возможностью регулировки зазора между указанными поверхностями.
На фиг.7 показан один из вариантов привода, в котором наружной передачей является приводная винтовая передача, а внутренней - преобразующая винтовая передача. Лучшим применением приводов этой модификации являются водные велосипеды, веломобили, велосамокаты. В таком приводе ведомые звенья 105 и 106 связаны с общим валом 107, который установлен в корпусе 108 на шарикоподшипниках. Опорные звенья 109 и 110 образуют с корпусом 108 шарикоподшипниковое соединение 111 и жестко связаны с рычагами 112. Кроме того, опорные звенья 109 и 110 через шарики 113 связаны с приводными звеньями 114 и 115, взаимодействующими с ведущими звеньями 116 и 117, которые связаны с ведомыми звеньями 105 и 106, имеющими левую и правую резьбу.
Каждое опорное звено 109 и 110 охватывает соответствующее ведомое звено 105 и 106 и установлено с возможностью поворота в корпусе 108, в котором размещены с возможностью вращения ведомые звенья 105 и 106, жестко связанные со ступицей 118 колеса посредством общего вала 107.
На фиг.8 представлен привод, приводные звенья 119 и 120 так же, как и ведомые звенья 121 и 122 жестко связаны между собой посредством торцевых шлицевых соединений и резьбовых муфт 123 и 124 соответственно.
В приводе, показанном на фиг.9, приводные звенья 125 и 126 выполнены как единое целое с возможностью взаимодействия по поверхностям с трением скольжения с ведущими звеньями 127 и 128, а по резьбе с трением скольжения - с опорными звеньями 129 и 130. Ведущие звенья 127 и 128 связаны между собой наружным шарикоподшипниковым соединением 131. Ведомые звенья 132 и 133 и опорные звенья 129 и 130 установлены в разъемном корпусе 134, выполненном за одно целое с рамой.
Корпус 135 (фиг.10) может быть выполнен сборным и жестким, что исключает применение общей оси.
На фиг.11 представлен привод, в котором приводные рычаги 136 закреплены по центру привода к жестко соединенным между собой опорным звеньям 137 и 138, служащими осью. На опорных звеньях 137 и 138 с возможностью свободного инерционного вращения с минимально возможным радиусом установлены раздельно друг от друга ведомые звенья 139 и 140, которые выполнены с кольцевыми канавками, при этом ведущие звенья 141 и 142 выполнены в виде кольцевых винтов с наружной резьбой.
На фиг.12 представлен привод с раздельной установкой преобразующих и приводных винтовых передач и с центральным размещением приводных рычагов 143 и минимально возможным радиусом качения ведомых звеньев 144 и 145 относительно опорных звеньев 146 и 147, при этом ведущими звеньями 148 и 149 являются кольцевые втулки с наружными кольцевыми канавками. Ведущие звенья 148 и 149 и приводные звенья 150 и 151 установлены с возможностью взаимодействия по их поверхностям с трением качения и скольжения с регулированием зазоров между указанными поверхностями посредством перемещения рамы 152 привода, жестко связанной с приводными звеньями 150 и 151.
Приводные рычаги 153 (фиг.13) транспортного средства, размещенные по центру привода, дополнительно связаны с ведомыми звеньями 154 и 155 посредством упорных шарикоподшипников 156. Ведомые звенья 154 и 155 и опорные звенья 157 и 158 защищены подвижными кожухами 159 и 160, которые имеют постоянную форму.
В приводе, показанном на фиг.14, приводные звенья 161 и 162 жестко связаны между собой посредством промежуточного звена 163, которое связано с ползушкой 164, установленной на оси 165 с возможностью возвратно-поступательного движения. Ось 165 выполнена разрезной и связана с рамой 166, при этом опорные звенья 167 и 168, которые установлены на оси 165, связаны с приводными рычагами 169.
На фиг.15 представлен вариант привода, в котором приводные звенья 170 и 171 выполнены как единое целое, связаны с опорными звеньями 172 и 173, которые выполнены за одно целое с приводными рычагами 174 и 175. Приводные рычаги 174 и 175 установлены в корпусе рамы 176, связанном через подшипниковые соединения 177 с ведомыми звеньями 178 и 179, выполненными как единое целое.
Приводные звенья 180 и 181 (фиг.16) могут быть выполнены как единое целое и связаны с опорными звеньями 182 и 183, которые выполнены за одно целое с приводными рычагами 184 и 185. Опорные звенья 182 и 183 установлены в корпусе 186 рамы, связанном через подшипниковое соединение 187 с ведомыми звеньями 188 и 189, которые выполнены как единое целое. Ведущие звенья 190 и 191 связаны с приводными звеньями 180 и 181 через шарики с сепараторами и взаимодействуют через шарики 192 с ведомыми звеньями 188 и 189. Связь приводных и опорных звеньев 180, 181 и 182, 183 может быть осуществлена через резьбу скольжения.
Представленный на фиг.17 привод содержит приводные звенья 193 и 194, жестко связанные между собой посредством шлицев 195, винта 196 и гайки 197 и установлены с возможностью взаимодействия с ведущими звеньями 198 и 199. Приводные винтовые передачи - опорные звенья 200 и 201, выполненные за одно целое с приводными рычагами 202 и 203, и приводные звенья 193 и 194 взаимодействуют друг с другом через поверхности 204 с трением скольжения.
Приводные звенья 205 и 206 (фиг.18) установлены с возможностью взаимодействия друг с другом через тела 207 качения, которые заключены в сепаратор 208, выполненный в виде втулки скольжения. При этом каждое приводное звено 205 и 206, имеющее левую или правую резьбу, через шарики 209 взаимодействует с соответствующим опорным звеном 210 и 211 и связано со своим ведущим звеном 212 и 213, имеющим левую или правую резьбу. Ведущие звенья 212 и 213 через шарики 214 связаны с ведомыми звеньями 215 и 216, выполненными как единое целое.
Как показано на фиг.19, приводные звенья 217 и 218 могут быть связаны друг с другом полой осью 219 в виде трубы и стандартными подшипниками 220 качения. Ведущие и ведомые звенья 221, 222 и 223, 224 преобразующей передачи, а также приводные и опорные звенья 217, 218 и 225 и 226 приводной передачи имеют по существу один и тот же диаметральный размер.
На фиг.20 представлен привод, у которого опорные звенья 227 и 228 выполнены как единое целое с приводными рычагами 229 и 230 и имеют шлицы 231 качения, через которые с помощью шариков 232 они связаны с приводными звеньями 233 и 234, установленными с возможностью взаимодействия между собой через тела 235 качения. Кроме того, приводные звенья 233 и 234 связаны своими внутренними резьбами качения с соответствующими резьбами разрезной оси 236, которая установлена неподвижно и связана с рамой 237.
Привод может быть снабжен поворотными звеньями 238 и 239 (фиг.21), которые взаимодействуют посредством шлиц 240 качения с приводными звеньями 241 и 242. Опорные звенья 243 и 244 связаны друг с другом жестко и неподвижны относительно корпуса транспортного средства. Каждое приводное звено 240 и 241 связано со своим ведущим звеном 245 и 246 через поверхности 247 и 248 с трением качения и скольжения соответственно, а между собой - через тела 249 качения.
Приводные звенья 250 и 251 (фиг.22) установлены с возможностью совместного вращательного движения и/или возвратно-поступательного движения во взаимно противоположных направлениях. При этом они имеют одноименные резьбы качения, через которые связаны с опорными звеньями 252 и 253, связанными с приводными рычагами 254 и 255. Опорные звенья 252 и 253 шарикоподшипниковыми соединениями связаны с цельной осью 256. Приводные звенья 250 и 251 связаны между собой подвижными штифтами 257, причем на каждое из них установлено ведущее звено 258 и 259 соответственно, которое взаимодействует с соответствующим ведомым звеном 260 и 261. Ведомые звенья 260 и 261 могут быть выполнены как единое целое, поскольку имеют резьбы одного направления.
На фиг.23 представлен один из оптимальных вариантов адаптационного шариковинтового привода мускульных транспортных средств нового поколения, в котором благодаря незначительным конструктивным изменениям можно добиться существенных изменений в работе приводных рычагов с разной степенью адаптации к передаче мускульной энергии человеком. Кроме того, детали привода технологичны в изготовлении и многофункциональны.
Привод снабжен промежуточными звеньями 262 и 263, установленными между ведущими звеньями 264 и 265 и опорными звеньями 266 и 267 с возможностью взаимодействия с ведущими звеньями 264 и 265 по поверхностям с трением скольжения и качения. Каждое из промежуточных звеньев 262 или 263 жестко связано с соответствующим приводным звеном 268 или 269, имеющим на внутренней и наружной поверхностях винтовые и шлицевые канавки для взаимодействия через тела качения с опорными звеньями 266 и 267 и с поворотными звеньями 270 и 271. Каждое из поворотных звеньев 270 или 271 установлено внутри соответствующего опорного звена 266 или 267, с которым оно связано шарикоподшипниковым соединением 272. Кроме того, поворотные звенья 270 и 271 связаны между собой шарикоподшипниковым соединением 273 и установлены с возможностью поворота друг относительно друга и опорных звеньев 266 и 267, которые связаны с рамой 274.
Ведомые звенья 275 и 276 выполнены в виде гаек с шестизаходной левой и правой резьбой и жестко связаны между собой и с корпусом 277, который выполнен в виде обоймы колеса. Ведомые звенья 275 и 276 связаны через шарики 278 диаметром 5 мм с ведущими звеньями 264 и 265, имеющими по две пары наружных кольцевых канавок и установленными с возможностью взаимодействия между собой через двухрядные сепараторы 279 с шариками 280 и подшипниковое кольцо 281, связывающее через шарики 282 промежуточные звенья 262 и 263. Однако промежуточные звенья 262 и 263 могут быть установлены с возможностью взаимодействия между собой через поверхности с трением скольжения.
Шлицы качения приводных звеньев 268 и 269 и поворотных звеньев 270 и 271, которые взаимодействуют друг с другом через шарики 283, служат для крепления посредством штифтов 284 промежуточных звеньев 262 и 263 и приводных рычагов 285.
Промежуточные звенья 262 и 263 могут быть установлены с возможностью взаимодействия между собой по поверхностям с трением скольжения или с возможностью взаимодействия, например, посредством шарикоподшипникового соединения.
Промежуточные звенья 262 и 263 могут взаимодействовать между собой через подшипниковые кольца 286 и 287 (фиг.24), с которые они связаны через тела 288 качения, например шарики. Между указанными подшипниковыми кольцами 286 и 287 может быть установлена пружина 289 сжатия (фиг.25).
На фиг.26 показан привод, содержащий два штампованных стакана 290 и 291, служащих ступицей спицевого или дискового колеса транспортного средства. Стаканы 290 и 291 жестко связаны между собой и с ведомыми звеньями 292 и 293 в виде резьбовых втулок с многозаходной левой и правой резьбой посредством стандартных крепежных элементов. Стаканы 290 и 291 через кольца 294, шарики 295 и сепараторы 296 образуют шарикоподшипниковые соединения с опорными звеньями 297 и 298 в виде гаек, которые через шлицевые или другие соединения жестко связаны с рамой 299, а посредством своих винтовых канавок и шариков 300 они связаны с приводными звеньями 301 и 302, имеющими шлицевые канавки качения на внутренних поверхностях и винтовые канавки качения на наружных поверхностях.
Приводные звенья 301 и 302 через шарики 303 связаны с поворотными звеньями 304 и 305, образующими между собой торцевое шарикоподшипниковое соединение с шариками 306 и сепараторами 307. Кроме того, приводные звенья 301 и 302 соединены жестко с промежуточными звеньями 308 и 309, каждое из которых установлено с возможностью взаимодействия с ведущими звеньями 310 и 311 (кольцами) по сопрягаемым поверхностям, а также через шарики 312 с сепараторами 313 и кольца 314 и 315. Ведущие звенья 310 и 311 через свои кольцевые канавки посредством шариков 316 с сепараторами 317 связаны с ведомыми звеньями 292 и 293.
Между промежуточными звеньями 308 и 309 в сборных сепараторах 318, удерживающих шарики 319 от выпадения, центрирующихся по внутренней поверхности ведомых звеньев 292 и 293 (гаек), находятся шарики 320 из упругодеформируемого материала или стальные.
Опорные звенья 297 и 298 с многозаходными левой или правой резьбами через двойные шарикоподшипниковые соединения, образованные шариками 321, сепараторами 322 и кольцами 323, связаны с поворотными звеньями 304 и 305, которые через шлицевые канавки 324 с помощью штифтов 325 связаны с приводными рычагами 326.
На фиг.27-30 представлены конструкции приводов с различными адаптационными свойствами. Ведомые звенья 327 и 328 преобразующей винтовой передачи связаны жестко между собой ступицей 329 колеса, а ведущие звенья 330 и 331 подвижно связаны с ведомыми звеньями 327 и 328 через шарики 332 и при необходимости через сепараторы 333.
Каждый из этих приводов снабжен двумя промежуточными звеньями 334 и 335, каждое из которых установлено между опорным звеном 336 или 337 и ведущим звеном 330 или 331 соответственно с возможностью взаимодействия с ведущим звеном 330 или 331 по конической поверхности с трением скольжения, а также через шарикоподшипниковое соединение: шарики 338 и сепараторы 339.
На внутренних поверхностях промежуточных звеньев 334 и 335 выполнены винтовые канавки 340 качения, через которые посредством шариков 341 они связаны с наружными канавками опорных звеньев 336 и 337, которые жестко связаны с рамой 342. Кроме того, на внутренних поверхностях промежуточных звеньев 334 и 335 выполнены шлицевые канавки 343, через которые посредством шариков 344 промежуточные звенья 334 и 335 взаимодействуют с поворотными звеньями 345 и 346.
Поворотные звенья 345 и 346 связаны между собой подвижно шарикоподшипниковым соединением, образованным шариками 347, сепараторами 348 и кольцами 349. Также подвижно через шарики 350 и сепараторы 351 поворотные звенья 345 и 346 связаны с опорными звеньями 336 и 337, а через торцевые шлицы или зубья с помощью болтов 352 они жестко связаны с рычагами 353.
Промежуточные звенья 334 и 335 могут быть установлены с возможностью взаимодействия между собой по поверхностям с трением скольжения, как показано на фиг.27, или с возможностью взаимодействия, например, посредством шарикоподшипникового соединения, образованного шариками 354 (фиг.28) и сепараторами 355.
Между промежуточными звеньями 334 и 335 (фиг.29) могут находиться шарики 356 и сепараторы 357, а также пружины 358 сжатия.
Промежуточные звенья 334 и 335 могут взаимодействовать друг с другом посредством шарикоподшипникового соединения, образованного кольцом 359 (фиг.30), шариками 360 с сепараторами 361.
На фиг.31 представлен привод, в котором приводные звенья 362 и 363 выполнены за одно целое с промежуточными звеньями 364 и 365, которые установлены с возможностью возвратно-поступательного перемещения относительно оси 366 привода и взаимодействия между собой. Кроме того, указанные звенья дополнительно взаимодействуют через упругий элемент 367, например пружину сжатия. Каждое приводное звено 362 и 363 взаимодействует с внутренней стороны с соответствующим опорным звеном 368 и 369, а с наружной стороны - с ведущим звеном 370 и 371. Опорные звенья 368 и 369 через шарикоподшипниковые соединения 372 и 373 связаны с осью 366 и жестко - с приводными рычагами 374. Промежуточные звенья 364 и 365 выполнены как ползушки с возможностью перемещения по плоскости оси 366. Ведущие звенья 370 и 371 через шарики 375 взаимодействуют с ведомыми звеньями 376 и 377, выполненными в виде гаек с резьбой разного направления.
Опорные звенья 368 и 369 могут быть жестко связаны с рамой 378, а приводные рычаги 374 жестко связаны с осью 366, при этом в приводных винтовых парах может быть выполнена одноименная резьба.
Показанный на фиг.32 привод содержит опорные звенья 379 и 380, жестко связанные с рамой 381. Ось привода выполнена составной из частей 382 и 383, установленных с возможностью поворота друг относительно друга. При этом с каждой частью 382 и 383 оси жестко связан соответствующий приводной рычаг 384. Промежуточные звенья 385 и 386 установлены с возможностью взаимодействия между собой через пружину 387 и жестко связаны с приводными звеньями 388 и 389.
Промежуточные звенья 390 и 391 (фиг.33) могут быть установлены с возможностью взаимодействия между собой и соответствующими приводными звеньями 392 и 393 через пружину 394 сжатия. Дополнительно между промежуточными звеньями 390 и 391 и опорными звеньями 395 и 396 установлены пружины 397 и 398.
Представленный на фиг.34 привод позволяет осуществлять независимую и одновременную работу сразу двумя приводными рычагами 399 и 400, которые связаны с поворотными звеньями 401 и 402, образующими между собой торцевое шарикоподшипниковое соединение 403. Каждое поворотное звено 401 и 402 связано через шарикоподшипниковое соединение 404 с соответствующим опорным звеном 405 и 406. Каждое поворотное звено 401 и 402 через шарики 407 образуют шлицевое подвижное соединение с приводными звеньями 408 и 409, на которые напрессованы промежуточные звенья 410 и 411, расположенные между опорными звеньями 405 и 406 в осевом направлении. Каждое промежуточное звено 410 и 411 связано с соответствующим ведущим звеном 412 и 413 через кольца 414, шарики 415 и конические поверхности.
На фиг.35 показан привод, содержащий два стакана 416 и 417, жестко связанных между собой и образующих шарикоподшипниковые соединения посредством шариков 418 и сепараторов 419 с ведущими звеньями 420 и 421 в виде гаек с левой и правой резьбой, связанных через шарики 422 с приводными звеньями 423 и 424 в виде винтов. Промежуточные звенья 425 и 426 связаны жестко с приводными звеньями 423 и 424 и подвижно между собой посредством шарикоподшипникового блока, состоящего из упорного подшипника 427 и двух радиально-упорных подшипников 428, связанных осью 429. Приводные звенья 423 и 424 образуют шариковинтовые передачи с опорными звеньями 430 и 431, которые жестко связаны с рамой 432 и образуют шарикоподшипниковые соединения 433 и 434 со стаканами 416 и 417. Промежуточные звенья 425 и 426, находящиеся внутри приводных звеньев 423 и 424 в осевом направлении, жестко связаны с приводными рычагами 435, которые связаны с рамой 432 посредством эластичных кожухов 436.
Представленный на фиг.36 привод содержит опорные звенья 437 и 438, выполненные в виде полуосей, связанных между собой и рамой 439 транспортного средства жестко. По центру указанных полуосей с возможностью свободного вращения установлены ведомые звенья 440 и 441, выполненные за одно целое с минимальным радиусом вращения. Приводные звенья 442 и 443 образуют винтовые передачи качения с опорными звеньями 437 и 438, а с ведущими звеньями 444 и 445 они связаны с возможностью регулировки осевого люфта и жестко связаны с приводными рычагами 446. Между приводными рычагами 446 и рамой 439 расположены защитные кожухи 447.
Приводные звенья 448 и 449 (фиг.37) могут быть связаны жестко с приводными рычагами 450 через регулировочные гайки 451 и кожухи 452, которые установлены с возможностью перемещения вдоль ведомых и опорных звеньев 453, 454 и 455, 456 соответственно.
Ведомые звенья 457 и 458 (фиг.38) могут быть выполнены составными, а кожухи 459 расположены между рамой 460 и приводными рычагами 461 и выполнены упругодеформируемыми.
На фиг.39 показан привод, у которого опорные звенья 462 и 463 жестко связаны с рамой 464, установленной по центру привода. Ведомые звенья 465 и 466, жестко связанные с колесами 467, установлены между приводными и ведущими звеньями 468, 469 и 470, 471.
Приводные рычаги 472 и 473 (фиг.40) могут быть установлены на приводных звеньях 474 и 475 с возможностью осевого перемещения и последующей жесткой их фиксацией.
На фиг.41 представлен привод, в котором приводные звенья 476 и 477 жестко связаны между собой посредством торцевых зубьев 478 и резьбовой гайки 479, взаимодействующей с ведущими звеньями 480 и 481 через тела 482 качения с сепараторами 483.
Промежуточные звенья 484 и 485 (фиг.42) могут быть установлены в приводе между ведущими и опорными звеньями 486, 487 и 488, 489 соответственно в осевом положении.
Кроме того, промежуточные звенья 490 и 491 (фиг.43) могут быть установлены с возможностью взаимодействия с приводными звеньями 492 и 493 по поверхностям 494 с трением скольжения.
Ведомые звенья 495 и 496 (фиг.44) могут быть выполнены за одно целое и являться общей осью привода.
Под адаптационными свойствами привода следует понимать высокую степень приспособления его работы к удобной высокоэффективной (высокий КПД) передаче мускульной энергии человека в строгом соответствии с законом движения рук, ног, спины с использованием собственного веса при свободном выборе режимов работы привода в зависимости от условий разгона и движения транспортного средства.
Этот процесс является двухсторонним. С одной стороны, привод только за счет возможности восприятия оптимальных силовых импульсов способен выдавать все необходимые параметры движения - ускорение, скорость, крутящий момент. При этом также необходимо, чтобы привод свободно изменял параметры приводных движений - амплитуду, частоту и диапазон. С другой стороны, благодаря этому у человека появляется возможность выбора из множества различных вариантов работы именно такого, какой ему требуется в данный момент времени. Главное, что человек по своему желанию определяет, выбирает и действует на привод с необходимой силой в сочетании с наиболее удобными для данного взаимодействия движениями - амплитудой, частотой, диапазоном (свободно изменяющиеся - ход, количество движений, положения тела, ног), в котором происходят движения.
Предлагаемые конструкции приводов позволяют выбирать самые экономичные режимы работы человека на мускульных транспортных средствах, т.е. наилучшим образом использовать активные (динамические) и пассивные (статические) мускульные силы человека для обеспечения движения транспортного средства с мускульным приводом в различных режимах. При использовании предлагаемого привода, например, на велосипеде можно условно выделить три режима его работы - силовой, средний и скоростной.
1. Силовой режим характеризуется тем, что осуществляется при наибольшем плече L (фиг.45) каждого приводного рычага А, практически равном его длине R. Угол α разворота рычагов А составляет от 5 до 30-40°, при этом величина h вертикального перемещения в зависимости от длины R рычагов А может составлять от 30 до 120-150 мм. Частота движений в минуту может составлять от 15-30 до 60-120, а в некоторых случаях до 180-220, при этом крутящий момент в таком режиме может быть в пределах 40-15 кг/м, а скорость - от 0 до 15-20 км/час. Ускорения, вызываемые постоянно действующей силой тяжести, толкающими и тянущими силами, также могут быть значительными.
2. Средний режим работы привода происходит при плече L (фиг.46) рычагов А от 100 до 75%. Угол α разворота рычагов А такой же, как и при силовом режиме, т.е. 30-40°. Величина h вертикального перемещения находится также в пределах 120-150 мм. Частота движений в минуту может варьироваться в пределах от 30 до 120 и выше, при этом крутящий момент 15-5 кг/м, а скорость - от 15 до 30-50 км/час.
3. При скоростном режиме работы привода плечи L (фиг.47) рычагов А могут меняться от 75% до нуля или от 100% до нуля, т.е. в конце хода действует инерционная сила. Относительный угол α разворота рычагов А может составлять 75-120°. Величина h вертикального перемещения находится в пределах от 150 до 250-300 мм. Частота движений в минуту может варьироваться в пределах от 30 до 120 и выше, а скорость может достигать 75 км/час и выше.
Деление работы привода на три режима условное, в действительности переход от силового режима с минимальными перемещениями к скоростному режиму с максимальными или оптимальными перемещениями происходит плавно и постепенно. Следует отметить, что при инерционном движении, т.е. во время отдыха, человек может устанавливать педали в наиболее удобном нижнем положении для лучшего расслабления ног, из которого педали для продолжения работы в любой момент могут быть перемещены в необходимое положение.
Предлагаемый адаптационный шариковинтовой привод транспортного средства работает следующим образом.
При действии на педали и/или рукояти (на фиг.1 не показаны) ногами и/или руками во взаимно противоположных направлениях (если приводные винтовые передачи выполнены с левой и правой многозаходной резьбой) рычаги 17 и 18 поворачивают связанные с ними опорные звенья 11 и 12 во взаимно противоположные стороны и через промежуточные шарики 13 действуют на приводные звенья 9 и 10, которые совершают поступательное движение вдоль оси, при этом они при движении в каждую сторону действуют соответствующими своими коническими поверхностями на конические поверхности ведущих звеньев 2 и 3. Сила взаимодействия и момент трения, возникающий на конических поверхностях, позволяют преобразовать поступательное движение ведущих звеньев 2 и 3 через шарики 5 во вращательное движение в одну сторону ведомых звеньев 7 и 8 и связанных с ними колес. Причем, когда одна винтовая передача (например, приводное звено 9, ведущее звено 2, ведомое звено 7) преобразует поступательное движение во вращательное, приводное звено 10 другой винтовой передачи действует на ведущее звено 3 под действием шарикоподшипникового соединения, образованного шариками 22 и сепараторами 23, при наличии зазора между коническими поверхностями совершает ускоренное винтовое движение с направлением вращения, совпадающим с направлением вращения ведомых звеньев 7 и 8. Для этого зазоры (осевые люфты) между поверхностями с трением качения и скольжения между приводными звеньями 9, 10 и ведущими звеньями 2, 3 должны быть минимально возможными и обеспечивать их надежное взаимодействие при движении в каждую сторону. Следует также отметить, что энергия холостого хода ведущих звеньев 2, 3 (винтовое движение с ускоренным вращением) всегда передается ведомым звеньям 7 и 8, в результате чего происходит выравнивание их скоростей вращения, причем это всегда сопровождается автоматическим образованием зазора между поверхностями с трением скольжения.
Преобразование движения будет происходить при перемещении рычагов 17, 18 друг относительно друга во взаимно противоположных направлениях, при этом каждый рычаг 17, 18 может перемещаться со скоростью от V=0 до Vmax=gt, где g=9,8 м/сек2.
Преобразование будет также происходить, если двигать каким-то одним рычагом 17 или 18, при этом другой рычаг 18 или 17 будет оставаться на месте. Предлагаемая конструкция привода обеспечивает большое количество вариантов перемещения рычагов 17, 18 с плавным переходом от скоростного режима работы привода в силовой режим с симметричными и/или асимметричными движениями руками и ногами, т.е. адаптационные свойства привода позволяют эффективно работать на нем и физически подготовленным людям и людям, имеющим изъяны физического развития, и даже инвалидам без руки и/или ноги.
Кроме того, существенным отличием предлагаемого привода от известных конструкций является то, что при необходимости возможно свободно перемещать оба рычага 17, 18 в какую-либо сторону, при этом желательно, чтобы скорость поворота рычагов 17 и 18 была одинаковой, или можно действовать на рычаги 17 и 18 с небольшим усилием, чтобы незначительное осевое перемещение, которое может возникнуть и следствием которого может быть подтормаживание, было как можно меньше.
Конструкция этого привода позволяет совершать симметричные и асимметричные приводные движения с постоянной и/или изменяющейся амплитудой и частотой движений с плавным переходом этих движений из одного режима в другой (силовой - средний - скоростной), что позволяет эффективно передавать энергию движения от человека на привод мускульного транспортного средства.
Если приводные винтовые передачи выполнены с одноименной многозаходной резьбой (левая - левая или правая - правая), то преобразование будет происходить при движении обоих рычагов 17, 18 в одном и том же направлении. Такие возможности привода позволяют создать большое количество разнообразных конструкций мускульных транспортных средств, у которых передаточное отношение привода легко изменяется в автоматическом плавном режиме.
Привод, представленный на фиг.1, может быть использован на различных транспортных средствах, в основном наземных и водных, обладает широким набором адаптационных свойств и автоматически выполняет главное - чистое инерционное вращение колеса после прекращения действия сил в одном направлении и автоматически предотвращает вращение в противоположном направлении - тормоз на горке. При торможении заклинивания и огранки шариков 5 происходить не будет, поэтому долговечность привода будет очень высокой.
Работа привода, представленного на фиг.2, отличается тем, что, когда приводные звенья 29 и 30 под действием опорных звеньев 32, 33 перемещаются, например, влево, то приводное звено 30 своей конической поверхностью взаимодействует с конической поверхностью ведущего звена 26, которое через шарики 46 приводит во вращение ведомое звено 45 и связанное с ним звено 44. Одновременно с этим образовавшийся при движении влево зазор между коническими поверхностями ведущего и приводного звеньев 25 и 29 соответственно позволяет ведущему звену 26 под действием шариков 27 перемещать другое ведущее звено 25 влево. При этом ведущее звено 25 вращается относительно звена 26 и совершает винтовое движение относительно ведомого звена 44 благодаря наличию собственных винтовых канавок и кольцевых канавок ведомого звена 44, между которыми катятся и вертятся шарики 46.
Следует подчеркнуть, что вращение ведущего звена 25 происходит благодаря передаче части крутящего момента от вращающихся ведомых звеньев 44 и 45, при этом их направления вращения совпадают, поскольку создаваемый в это время преобразующими звеньями 30 и 26 крутящий момент значительно больше.
Кроме того, всегда при создании крутящего момента и скорости вращения одним ведущим звеном другое ведущее звено будет совершать винтовое холостое движение со значительно меньшим крутящим моментом, но со скоростью, значительно превышающей скорость вращения ведомых звеньев. Поэтому очень важен тот факт, что накопленная энергия винтового (главным образом вращательного) движения ведущего звена по прекращению действия преобразующих сил передается на ведомые, то есть суммируется энергия вращения ведомых звеньев 44 и 45 с энергией вращения холостого хода ведущего звена 25. В данном приводе энергия холостого хода ведущего звена незначительна, но важен факт возврата энергии (энергия не теряется, а возвращается). Суммирование этих энергий происходит автоматически до того момента, пока их скорости вращения не станут одинаковыми. После этого до нового преобразующего движения ведомые звенья 44 и 45 через свои канавки и шарики 46 действуют на винтовые канавки ведущих звеньев 25 и 26 так, что они поджимаются друг к другу через шарики, автоматически образуя при этом зазоры между коническими поверхностями ведущих и приводных звеньев 25, 26 и 29, 30 соответственно. Так образуется свободный ход (инерционное вращение) привода, при этом никаких заклиниваний и трений между рабочими поверхностями и шариками не происходит. При инерционном вращении колеса (вместе с ним вращаются ведомые звенья 44 и 45, ведущие звенья 25 и 26 и шарики 46 и 47) легко переместить оба приводных рычага, поворачивая их одновременно в ту или иную сторону, при этом вместе с ними будут поворачиваться опорные и приводные звенья 32, 33 и 29, 30 соответственно.
Работа привода, показанного на фиг.3, идентична работе привода по фиг.1, но его КПД несколько ниже, так как приводные винтовые передачи выполнены с трением скольжения. Однако благодаря использованию современных консистентных смазок такой привод более надежный и долговечный.
Использование в приводе, представленном на фиг.4, рамы 65 с кожухом, расположенным между колесом и приводными рычагами 71 и 72, делает работу на нем более комфортной как при преобразовании движений, так и при свободном перемещении.
Работа приводов на фиг.5 и 6, несмотря на некоторые конструктивные отличия, связанные с технологическими изменениями при изготовлении и сборке, практически остается такой же. Менее жесткая установка опорных звеньев практически не сказывается на высоком уровне работоспособности.
На фиг.7-10 представлены приводы, работа которых такая же, как и предыдущих приводов. Некоторые их конструктивно-технологические изменения направлены на применение их для транспортных средств различных конструкций, для которых именно такие конструктивные решения наиболее рациональны. Из этой группы приводов особенно выделяется привод, показанный на фиг.7, поскольку в нем ведомые и ведущие звенья находятся внутри привода, а приводные винтовые пары расположены снаружи. Одним из наиболее важных преимуществ такого привода является то, что радиус взаимодействия конических (приводных) поверхностей увеличен, а приводные рычаги 112 располагаются вдоль радиальной оси симметрии по центру. Такая конструкция применима во многих транспортных средствах, таких как водный велосипед, веломобили, грузовые велосипеды, специальные самокаты. Разнообразные варианты приводов для мускульных транспортных средств дают возможность для создания еще большего количества разнообразных и специальных транспортных средств и других устройств.
В приводе, представленном на фиг.11, приводные рычаги 136, выполненные с разнообразными площадками (качалками), могут совершать возвратно-качательные движения со свободным изменением амплитуды, частоты, диапазона. Так, при повороте винтовой оси, жестко связанной с рычагами 136 (площадками), состоящей из двух опорных звеньев 137 и 138, приводные звенья 137а, 138а, совершая поступательные движения, действуют на конические поверхности ведущих звеньев 141 и 142, которые и создают независимые вращения ведомых звеньев 139 и 140. Наличие двух колес на ведомых звеньях с независимым вращением придают приводу устойчивость и обеспечивают возможность поворота в любую сторону как при движении под действием сил, так и при инерционном движении. Приводные винтовые пары могут быть выполнены с различными сочетаниям резьб (левая - правая, правая - левая, левая - левая, правая - правая). В зависимости от этого и движения на приводе можно получать различные: непрерывное инерционное; одностороннее инерционное с вращением в одну или другую сторону.
Работа привода, показанного на фиг.12, аналогична вышеописанному приводу. Выполнение ведомых звеньев с резьбой, а ведущих - с кольцевыми канавками может повлиять на то, что при тех же самых размерах привода и диаметрах шариков, применяемых в преобразующих парах, передаточное отношение будет другим (скорость вращения и крутящий момент). В некоторых конструкциях целесообразно, чтобы приводные рычаги 143 выполняли функцию рамы, а рама выполняла функции двух рычагов, к которым через педали и/или рукояти человек будет прикладывать силы и которыми он будет действовать абсолютно независимо, выбирая наилучшие адаптационные режимы.
В приводе на фиг.13 также возможен обмен функциями рамы и приводных рычагов. Но в данном варианте лучшая работоспособность обеспечивается лучшей герметичностью и жесткостью. Следует также заметить, что когда приводные рычаги 153 совмещены, происходит преобразование возвратно-качательного движения во вращательное. В случае, когда рычаги 153 становятся рамой, происходит преобразование двух независимых возвратно-винтовых движений в непрерывное вращение.
Работа привода на фиг.14 также возможна в случае, когда приводные рычаги 169 будут совершать возвратно-качательные движения, асинхронные и синхронные в каждую сторону (в зависимости от направлений резьб), при этом ведомые звенья 161 и 162 будут совершать возвратно-поступательные движения, которые преобразуются во вращательное движение. Таким образом, такая конструкция дает возможность использовать в приводных и преобразующих винтовых передачах резьбы различных направлений и в зависимости от этого получать различные сочетания движений приводными рычагами. Если приводные рычаги 169 поменять местами с рамой 166, то при возвратно-качательных движениях рычагов 169 приводные звенья 161 и 162 будут совершать только возвратно-винтовые движения, которые преобразуются во вращательное. Тем самым можно иметь различные выходные технические характеристики привода только за счет того, что можно менять функции приводных рычагов и рамы.
Привод, представленный на фиг.15, преобразует строго определенные движения, которыми человек будет действовать только на приводные рычаги 174 и 175. Это более простой вариант привода на фиг.1, который работает точно так же при условии, если ведущие звенья, как и приводные, выполнены с резьбой разного направления, а на приводные рычаги действуют строго разнонаправленными силами. В этом случае получают непрерывное вращение ведомых звеньев с инерционным эффектом. При действии на рычаги 174 и 175 однонаправленными силами преобразования движения не происходит, рычаги только перемещаются. Возможны варианты работы, когда разнонаправленными силами оказывают большое давление на коническую поверхность ведущего звена и при таком воздействии поворачивают оба рычага в одну сторону с разными угловыми скоростями. Благодаря этому получают широкий спектр технических характеристик привода, который хорошо использовать при разгоне и/или езде в гору. Адаптационные свойства привода и дают возможность человеку приспособиться к работе механизма, который выдает необходимые для движения характеристики.
Приводы на фиг.16 и 17 способны работать аналогично приводам, приведенным на фиг.1 и 15, и имеют различные технические характеристики в зависимости от угла наклона винтовых передач с трением скольжения и качения.
Привод, представленный на фиг.18, выполнен так, что работа на нем может производиться каждым рычагом как независимо друг от друга, так и синхронизированно от тянущих сил, то есть, когда, например, приводное звено 205 совершает холостой ход (действует на ведущее звено через тела качения), одновременно с этим оно действует через шарики 207 на приводное звено 206, которое совершает рабочий ход, действуя на коническую поверхность ведущего звена 213. Таким образом, два возвратно-винтовых движения, синхронизированных или независимых, под действием тянущих и толкающих усилий преобразуются в непрерывное инерционное движение ведомых звеньев 215 и 216. При одновременном действии толкающими силами на рычаги они могут быть использованы как опора. Возможно также действовать на привод только толкающими силами и при этом синхронизировать движения рычагов, передавая рабочие усилия через шарики 207, то есть преобразование будет происходить под действием рычага, поднимающегося вверх. Такое разнообразие действий и взаимодействий возможно на фоне свободного изменения амплитуды, частоты, диапазона движений приводными рычагами. Для получения определенного вида работы на приводе приводные и преобразующие винтовые передачи необходимо выполнять с определенным направлением резьбы, а для получения исходных технических характеристик необходимо правильно выбирать число заходов, угол наклона, количество шариков и их диаметр.
На фиг.19 изображен привод, который полностью синхронизирует движения приводных звеньев 217 и 218, а значит и приводных рычагов, которые могут совершать возвратно-винтовые движения с поворотами во взаимно противоположные стороны или в какую-либо одну сторону в зависимости от того, резьба какого направления будет выполнена на приводных парах. Для того чтобы получить одностороннее непрерывное вращение, ведомые звенья 223 и 224 так же, как и приводные звенья, должны иметь резьбы разного направления (левая, правая). При их взаимном расположении должно учитываться минимальное значение соотношения крутящего момента и скорости вращения.
При работе приводов, представленных на фиг.18 и 19, ноги и/или руки вместе с приводными рычагами должны совершать возвратно-винтовые движения (поворот от 0 до 150° с одновременным возвратно-осевым перемещением до 20-50 мм), которые при увеличении частоты движений становятся неудобными и менее эффективными. Устранить это позволяет привод, показанный на фиг.20. Для совершения строго возвратно-качательных движений рычаги 229 и 230 установлены в корпусе рамы на подшипниках и имеют шлицы качения, через которые они с помощью шариков взаимодействуют с соответствующими наружными шлицами приводных звеньев 233 и 234. Совершая качательные движения, рычаги 229 и 230 приводят во возвратно-винтовые движения приводные звенья 233 и 234, которые могут взаимодействовать между собой через торцевой подшипник (служащий для синхронизации движений приводных рычагов), а с ведущими звеньями - по коническим поверхностям для получения вращения. На таком приводе очень удобно работать собственным весом, перенося его с ноги на ногу.
Аналогичным образом работает привод на фиг.21. Отличие заключается в том, что ведущие звенья 245 и 246 выполнены с резьбой и связаны каждый со своим приводным звеном 241 и 241 через шарикоподшипниковые соединения 247, а перемещаются приводные звенья по винтовой оси 243, 244, которая жестко связана с рамой. В этом приводе возможно также осуществлять приводные движения осью 243, 244, которая в этом случае связывается с приводными рычагами, а звенья 238, 239 - с рамой.
Очень интересные варианты приводов (фиг.22) получаются при использовании в приводных и преобразующих винтовых передачах резьб одного направления. В случае, когда приводные винтовые передачи имеют резьбу одного направления (левая - левая, правая - правая), и для того чтобы приводные звенья 250 и 251 совершали поступательные движения под действием опорных звеньев 252 и 253, их необходимо связать между собой, например, подвижными штифтами 257. Теперь при воздействии на рычаги 254 и 255 взаимно противоположными силами приводные звенья 250 и 251 будут совершать поступательные движения во взаимно противоположных направлениях. В этом случае связанные с ними ведущие звенья 258, 259 будут перемещаться относительно ведомого звена, имеющего резьбу одного направления, и будут создавать непрерывное инерционное вращение. То есть в этих вариантах можно иметь общее ведомое звено с левой или правой резьбой.
При одновременном повороте обоих рычагов в какую-либо сторону преобразования движения происходить не будет, то есть так же, как и приводов на фиг.1, появляется возможность свободного перемещения их для правильного выбора режима работы.
Привод, представленный на фиг.23, содержит промежуточные звенья, изменение взаимодействия между которыми приводит к изменению адаптационных свойств механизма и появлению новых свойств. Когда промежуточные звенья 262 и 263 связаны подшипниковым кольцом 281 с шариками, установленным в сепараторы различных конструкций, то движения приводных рычагов 285 будут полностью синхронизированы и на каждый из них можно оказывать двухстороннее воздействие, при этом в любой момент времени они могут быть использованы в качестве упора с сохранением инерционного вращения ведомых звеньев 275 и 276 со ступицей 277. Два возвратно-качательных движения приводных рычагов 285 с поворотными звеньями 270 и 271 преобразуются во взаимно противоположные винтовые движения приводных звеньев 268 и 269 вместе с промежуточными звеньями 262 и 263, под действием которых через ведущие звенья 264 и 265 и получается непрерывное инерционное ступицы 277.
Если кольцо 281 заменить двумя кольцами 286 и 287 (фиг.24), то характер работы привода существенно изменится с сохранением возможности синхронизированного движения приводными рычагами под действием односторонних сил в течение всего максимального хода (полная амплитуда движений), то есть такие движения целесообразны для достижения и поддержания максимальной скорости движения транспортного средства при свободно меняющейся частоте. Однако в начальные моменты движения (разгон) и /или при езде в гору возможно совершать независимые одновременные и/или переменные движения из положения, при которых длины плеч рычагов максимальны. Такие движения можно совершать до середины полного хода рычагов, изменяя амплитуду и частоту движений, а в дальнейшем плавно переходить на полный ход (максимальная амплитуда движений), но с попеременным движением каждого рычага с возможностью синхронизации от одностороннего действия сил.
Еще более разнообразные взаимодействия приводных и преобразующих передач можно получить, если между кольцами 286 и 287 (фиг.25) установить пружину 289. За счет постоянного действия пружины 289 через параллельные цепочки звеньев приводные рычаги всегда возвращаются в положения, при которых они имеют наибольшее плечо (для различных транспортных средств определенная их установка). Поэтому кроме тех свойств, которыми обладает привод на фиг.24, в данном приводе обеспечивается автоматический возврат рычагов в исходное положение под действием пружины. Для данного типа привода адаптационные свойства наиболее ярко могут быть проявлены благодаря одностороннему воздействию пружины на каждый рычаг.
Ускорение транспортного средства находится в прямой зависимости от времени действия силы на рычаг с наибольшим плечом. Быстрое повышение скорости приводит к возможному увеличению частоты движений, чтобы длина плеча рычага в каждый момент времени была наибольшей, и приложению (действию) максимальных сил. По мере разгона транспортного средства дальнейшее приращение скорости может обеспечиваться меньшими силовыми импульсами Ft, поскольку в данных конструкциях привода время t действия может быть const, то изменения силового импульса происходят только с силой F, которая от статической переходит в динамическую с ее разными значениями.
Об адаптационных свойствах механизма может идти речь лишь тогда, когда у человека появляется возможность выбирать из различных вариантов работы наиболее рациональный, при котором затрачивается наименьшее количество энергии, и он является наиболее удобным при данном режиме работы. Кроме того, привод может обеспечить эффективное торможение при одновременном действии двумя однонаправленными силами, как, например, привод на фиг.26.
Этот привод, как и показанный на фиг.23, может работать в большом количестве режимов с различным набором адаптационных свойств, а при синхронизированной работе приводными рычагами, которая достигается поочередным односторонним действием на каждый рычаг, можно получать высокие скорости вращения. Но, если действовать при таком режиме сразу на два рычага, то произойдет торможение ведущих, а вместе с ними и ведомых звеньев. Это становится возможным благодаря использованию упругодеформируемых шариков 318, упругости которых достаточно для передачи усилий для организации холостого хода движения каждой половины преобразователя. Но при одностороннем воздействии на оба рычага шарики 318 деформируются и цепочка деталей, находящихся между ведущими звеньями 310 и 311, смыкается и при соприкосновении конических поверхностей промежуточных и ведущих звеньев 308, 309 и 310, 311 соответственно происходит торможение.
Привод фиг.27 и последующие аналогичные конструкции имеют те же адаптационные свойства, что и приводы, представленные на фиг.23-25, но имеют улучшенные технические показатели (увеличенный свободный выбег) благодаря уменьшению диаметра (22-30 мм) подшипников ведомых звеньев (ступицы колеса).
В приводах, изображенных на фиг.27-30, в зависимости от применения резьб приводных и преобразующих винтовых пар (левая - левая; правая - правая) и соответственно в другом варианте (левая - правая; правая - левая) можно иметь различные технические характеристики, то есть соотношение числа оборотов к крутящему моменту будет различным при действии одной и той же силы и при одном и том же перемещении. Это соотношение в зависимости от угла наклона винтовых линий в передачах может быть значительным. Так, если на приводной (звено 336) и преобразующей (звено 330 и соответственно звенья 337 и 331) винтовых передачах направление резьбы одинаковое, то за одно полное двойное движение рычагов 353 ведомое звено 328 может совершить 1-1,5 оборота. Однако, если эти передачи будут иметь разноименные резьбы с теми же углами наклона резьбы, то так же за одно полное двойное движение рычагов 353 ведомое звено 328 совершит 2,5-3,5 оборота. В этих случаях привод работает следующим образом. Два возвратно-качательных движения рычагов 353 и поворотных звеньев 345 и 346 преобразуются в два возвратно-винтовых движения промежуточных звеньев 334 и 335 относительно опорных звеньев 336 и 337, движения которых через ведущие звенья 330 и 331 преобразуются в непрерывное инерционное движение ведомых звеньев 327 и 328. Данный привод (фиг.27) может иметь еще одну техническую характеристику при одной и той же конструкции. Для этого необходимо приводные движения осуществлять опорными звеньями 336 и 337, под действием которых, с учетом, что поворотные звенья 346 и 345 будут неподвижны и связаны с рамой, промежуточные звенья 334 и 335 будут совершать возвратно-поступательные движения, при которых они будут воздействовать на ведущие звенья. В этом случае ведомые звенья будут вращаться со скоростью 2-3 оборота за одно полное двойное движение рычагов, жестко связанных с опорными звеньями 336 и 337. Таким образом, приводы с одними и теми же деталями подобной конструкции могут преобразовывать возвратно-качательные движения со свободно изменяемой амплитудой, частотой и диапазоном движения в непрерывное вращение, которое может иметь три различные технические характеристики в зависимости от относительной установки между собой деталей в приводе. При этом на педали рычагов (длина рычагов может быть постоянна и равна 200-300 мм или телескопически изменяться) при рабочем ходе можно действовать силой от 70 до 120 кг и выше. И, кроме этого, в зависимости оттого, какие звенья будут соприкасаться при смыкании внутренних подвижных блоков - ведущие звенья 330 и 331 или промежуточные звенья 334 и 335 рычаги будут использованы как опоры или как тормоз при одностороннем одновременном действии на эти рычаги. За счет создания разных вариантов взаимодействия промежуточных звеньев 334 и 335 описанные свойства могут быть изменены или дополнены, обеспечивая целый набор адаптационных свойств привода. Установка шариков 354 и сепараторов 355 позволяет синхронизировать приводные движения (при действии на один рычаг получаем вращение ведомого звена и подъем второго рычага). Установкой пружины 358 добиваются возвращения рычагов в исходное положение. Связь промежуточных звеньев 334 и 335 шарикоподшипниковым соединением 359, 360 и 361 обеспечивает полную синхронизацию движений обоих рычагов в обе стороны с передачей на них двухсторонних сил, действия которых суммируются.
В вариантах приводов, представленных на фиг.31 и 32, приводные звенья 362, 363 или 388, 389 обладают свойствами ползушек, перемещающихся поступательно относительно оси 366 или 383, имеют возможность совершать независимые рабочие движения под действием поворотных звеньев 368, 369 и рычагов 374 и холостые перемещения под действием пружины 367. Возможно также получать непрерывное вращение за счет возвратно-качательного движения оси 366 или 382 и 383 при неподвижных приводных звеньях 368, 369 или 380, 379.
На фиг.33 показан привод, в котором возвратно-винтовые движения приводных звеньев 392, 393 при неподвижных опорных звеньях 395 и 396 или возвратно-качательные движения опорных звеньев 395 и 396 при поступательно перемещающихся приводных звеньях 392 и 393 преобразуются во вращательное. Такой привод обладает повышенной мягкостью холостого хода.
Привод на фиг.34, имея рациональную конструкцию с уменьшенными диаметральными размерами, может быть использован в детских транспортных средствах и в разнообразных конструкциях, включая спортивного характера. Данная конструкция лучше всего будет работать в режиме независимых приводных движений с возможностью создания максимального крутящего момента, возникающего сразу от одновременного действия двух рычагов, перемещающихся из верхнего исходного положения под действием собственного веса гонщика. Для независимых движений рычагов желательно, чтобы педали были оснащены туклипсами. Если подобным образом действовать и на привод, представленный на фиг.35, установленный, например, на грузовые 3- и более колесные транспортные средства, скоростные качества которых играют второстепенную роль, то для полностью синхронизированных движений рычагов 435, совершающих возвратно-винтовые перемещения под действием силы тяжести (веса), а также тянущих и толкающих усилий, которые суммируются, работа будет вполне приемлемой.
Увеличение мощности как раз и будет происходить при суммировании всех действующих сил, хотя для эффективной работы вполне достаточно веса человека, который попеременно действует на каждую педаль.
В приводах (фиг.36-40) с полностью независимыми движениями приводных рычагов предполагается наличие туклипсы на каждой педали. К главным достоинствам их конструкций относятся, в первую очередь, минимальные радиусы качения (вращения) ведомых звеньев, которые могут составлять 6-25 мм. Центральное расположение подвижной опоры ведомых звеньев предполагает работу рычагами как внутри рамы, так и снаружи, при этом также возможно, чтобы приводные рычаги для осуществления преобразования движений были связаны с приводными или опорными звеньями. Возможность преобразования движений приводных или опорных звеньев в непрерывное инерционное вращательное позволит создавать большое количество разнообразных конструкций транспортных средств.
Особенности конструкции привода, изображенного на фиг.41, делают его более совершенным: при меньших его размерах технические характеристики выше. В первую очередь, ведущие звенья 481 и 480 выполнены не с резьбовыми, а с кольцевыми канавками, благодаря чему на 1/3 сокращается осевой размер привода и/или имеется возможность увеличить число оборотов и нагрузочную способность. Приводные звенья также имеют меньшие осевые размеры и могут быть изготовлены наиболее производительной поточной технологией. Резьбовая гайка (муфта) 479 с натягом соединяет между собой приводные звенья 476 и 477 и прекрасно организует поверхности с трением качения после своего стопорения. Особенности в работе привода обусловливают его применение во многих транспортных средствах, но в первую очередь для гоночных велосипедов и веломобилей. Это объясняется тем, что при использовании такого типа привода очень эффективно и с достижением высоких результатов можно использовать большой запас мощности спортсменов. При установке на велосипеде такого привода к действию взаимно противоположных сил, сумма которых при малой амплитуде движений может составлять 200-350 кг, добавляется вес велосипедиста. Такой привод дает возможность плавно переходить от силовых режимов работы к скоростным, при которых величина вертикального перемещения будет оставаться оптимальной и составлять 100-250 мм, а также отдыхать спортсмену во время инерционного движения более интенсивно, так как ему можно занимать расслабляющие симметричные позы при распрямленных ногах. Для дальнейшего передвижения возможно параллельное перемещение обоих рычагов в необходимую рабочую зону и возобновление работы с оптимальной амплитудой и частотой движений.
Более эффективная работа привода возможна на веломобиле, где к силовым воздействиям ног добавляется работа рук. Спортсмен (или любой человек), удобно находясь в кресле со спинкой с заплечиками, расположение которого меняется по отношению к оси привода так, что при вертикальном положении спинки работа ног происходит в силовой зоне и по мере опускания спинки кресла оно подвигается и стопорится так, что работа рук и ног переходит в скоростную зону, при этом тело принимает полулежачее положение (а для особо скоростных транспортных средств и лежачее положение). При этом может происходить трансформация формы кузова, направленная на изменение коэффициента лобового сопротивления, то есть транспортное средство по мере увеличения скорости движения принимает более обтекаемую форму. Таким образом коленно-рычажный механизм ног человека позволяет создавать силовые импульсы разной величины очень экономично (с малыми затратами мышечной энергии) так, что создаваемая сила обратно пропорциональна ходу ног (амплитуды движения). При малых перемещениях (5-10 мм) возможно создавать малыми затратами силы, значительно превышающие вес человека (от G до 2-3 G и выше). При значительных перемещениях (250-300 мм) в скоростном режиме при взаимном расположении голени и бедра под углом 100-110° в начале хода можно действовать силой 3-5 кг с дальнейшим увеличением силы.
Еще два варианта привода, преимущественно для веломобилей, показаны на фиг.42-43. Здесь возможна только синхронизированная работа приводными рычагами, длину которых в начальные моменты разгона и/или езде в гору очень просто увеличить в полтора-два раза, а по мере разгона, когда может быть уменьшена сила действия, уменьшается длина рычага и изменяется траектория движения ноги, направленная на приближение к закону коленно-рычажного механизма.
На фиг.44 представлен еще один вариант универсального привода с очень малыми радиальными и осевыми размерами, который особенно предпочтителен для детских транспортных средств. Педали такого привода должны быть обязательно выполнены с пряжками для осуществления двухстороннего взаимодействия.
Таким образом, адаптационные свойства механизмов приводов позволяют выбирать самые экономичные режимы работы человека на мускульных транспортных средствах, не производя при этом никаких переключений, направленных на изменение передаточного отношения самого привода, а только благодаря целесообразным изменениям работы ног и/или рук (амплитуды, частоты и диапазона их движений) получать весь спектр характеристик, необходимых для движения транспортного средства - крутящий момент, скорость и ускорение. Это становится возможным благодаря предлагаемому шариковинтовому приводу, размещенному в ступице колеса (или другого исполнительного механизма), связанного с рамой (стойкой), приводным звеном которого является педаль разнообразных конструкций и рычаг постоянной и/или изменяемой длины. Такая работа А=S×F привода становится возможной благодаря увеличению в несколько раз (n~5-10 и больше) силы, действующей в самом механизме (благодаря его высокой нагрузочной способности), - n×F и сокращении в такое же количество раз перемещения  для получения одного оборота ведомого звена, то есть
для получения одного оборота ведомого звена, то есть  Поэтому силовые импульсы F×t=m×V, переходящие в количество движений, наилучшим образом передаются на привод через рычаг, имеющий определенную траекторию движения, то есть такой же закон движения, как и мускульно-рычажная система ног и рук человека (коленно-рычажные механизмы ног и рук). Таким образом, КПД передачи мускульной энергии на привод очень высок, при этом в зависимости от назначения транспортного средства возможны различные варианты адаптационной работы самого привода.
Поэтому силовые импульсы F×t=m×V, переходящие в количество движений, наилучшим образом передаются на привод через рычаг, имеющий определенную траекторию движения, то есть такой же закон движения, как и мускульно-рычажная система ног и рук человека (коленно-рычажные механизмы ног и рук). Таким образом, КПД передачи мускульной энергии на привод очень высок, при этом в зависимости от назначения транспортного средства возможны различные варианты адаптационной работы самого привода.
1. Приводами, имеющими лучшие адаптационные свойства, следует считать изображенные на фиг.1-7, 41, поскольку можно работать сразу двумя приводными рычагами, совместно перемещая их, свободно выбирая нужные силовые нагрузки для передачи силовых импульсов при минимальных перемещениях ног и/или рук. При этом на рычаги можно передавать тянущие и толкающие взаимно противоположные усилия при использовании собственного веса. При движении транспортного средства по инерции рычаги могут занимать любые удобные для ног или рук положения: например, для велосипедиста - это самое нижнее положение педалей, которые можно использовать в качестве опоры. Рычаги совместно могут быть перемещены в любое нужное положение в зависимости от условий движения и рельефа местности. При использовании такого привода на велосипедах педали должны быть обязательно оснащены туклипсами для силового перемещения их вверх. Лучшее использование таких приводов следует ожидать на веломобилях всех типов, особенно скоростных, использующих для движения усилия ног и рук.
2. Привод с синхронизированными взаимно противоположными движениями рычагов может быть с успехом использован для скоростных велосипедов, особенно трековых. Зона действия рычагов для передачи максимальных тянущих и толкающих усилий с использованием собственного веса может быть увеличена до 150° для того, чтобы в силовом режиме иметь наибольшие плечи рычагов при совмещенном их среднем положении. Чтобы передать максимальную мощность от человека на привод, педали также должны быть оснащены туклипсами. Одним из главных преимуществ такого привода является то, что педали в любом положении могут быть использованы в качестве опоры для сохранения равновесия или при кратковременном отдыхе, на инерционном вращении колеса такие действия не отражаются. Более удобной работа на приводе будет, если использовать собственный вес и/или толкающие усилия, не используя тянущие усилия. При этом, нажимая на одну педаль рычага, другой рычаг автоматически поднимается вверх (движется в противоположную сторону), поднимая вместе с тем расслабленную, отдыхающую ногу. Также очень удобно использовать собственный вес в начальные моменты разгона, перемещая из стороны в сторону центр тяжести, имея под ногами симметричную надежную опору. Такой тип привода может быть использован во многих видах мускульных транспортных средств, в первую очередь велосипедах, веломобилях, инвалидных колясках, водных велосипедах и других.
3. К третьему типу приводов относятся такие, в которых движения каждого рычага в силовом режиме независимы друг от друга и остаются таким до середины хода рычагов. При увеличении хода рычагов больше, чем на половину, они могут быть синхронизированными до максимальной амплитуды (хода) педалей. При этом педали в любой момент могут быть переведены в силовой режим работы. Удобное среднее симметричное расположение рычагов может быть также использовано в качестве опоры при инерционном движении и/или при преодолении неровностей дороги.
4. К четвертому типу приводов могут быть отнесены приводы третьего типа, при этом каждый рычаг возвращается в исходное положение под действием пружины.
5. К пятому типу относятся приводы с независимыми движениями рычагов на протяжении всего хода.
6. Приводы с независимыми движениями рычагов и обратным ходом, который осуществляется за счет пружины, относятся к шестому типу.
7. К седьмому типу относятся приводы, в которых для получения одинакового крутящего момента тянущие усилия могут быть значительно меньше (в 2,3 - 5 раз) толкающих. Такие приводы особенно пригодны для инвалидных колясок, при езде в гору.
8. Приводы 2, 3, 4, 5 и 6 типа, в которых движения рычагов в каждую сторону происходят совместно, относятся к восьмому типу.
Каждый тип приводов может осуществлять возвратно-качательные движения рычагов.
Таким образом, привод, выполненный согласно изобретению, оптимизирует процесс передачи на него мускульной энергии человека, его силовых импульсов. Оптимизация указанного процесса включает:
- приведение в соответствие закона изменения мускульных сил человека при движениях рук, ног или других частей тела в зависимости от амплитуды, частоты движений и конечных положений и требуемого закона движения транспортного средства, который характеризуется непрерывными изменениями крутящего момента, скорости и ускорения в течение одного цикла движений;
- плавное изменение передаточного отношения привода в автоматическом режиме с учетом последующего режима движения;
- использование возникающих при движениях инерционных сил;
- суммирование симметричных и асимметричных мускульных сил человека;
- синхронизацию симметричных и асимметричных движений ног и/или рук;
- обеспечение функционального торможения в любом положении педалей за счет изменения направления действия на одну из педалей и/или на обе педали.
Эффективное использование энергии стало возможным благодаря использованию:
1. Винтовых инерционных приводов с линейной зависимостью их входных и выходных параметров. К ним относятся приводы, у которых преобразующие винтовые передачи имеют резьбу с постоянным шагом и в течение каждого цикла приводных движений силовая и скоростная характеристики меняются посредством приводных рычагов или рычажной системы.
2. Винтовых инерционных приводов с нелинейной зависимостью их входных и выходных параметров, которая обеспечивается за счет применения в преобразующих винтовых передачах резьбы с непрерывно изменяемым шагом.
3. Винтовых инерционных приводов с нелинейной зависимостью их входных и выходных параметров, которая обеспечивается за счет применения в преобразующих винтовых передачах резьбы с переменным шагом и за счет изменения приводных движений посредством приводных рычагов или рычажной системы.
Использования вышеуказанных приводов в конструкциях велосипедов, веломобилей, инвалидных колясок и т.д. станут более рациональными, так как привод располагается в ступице ведущего колеса, а движения осуществляются по благоприятной траектории без мертвых точек. У велосипедиста появляется возможность более эффективно использовать собственный вес при разгоне и езде в гору, суммировать тянущие и толкающие движения ног при их синхронизации, уменьшить амплитуду движений, производить торможение в любом положении педалей.
В конструкциях велосипедов становится возможным плавно регулировать передаточное отношение и характеристики крутящего момента, скорости и ускорения за счет изменения амплитуды, частоты и диапазона движений.
Использование приводов предлагаемых конструкций позволяет:
- сократить расстояние между колесами, облегчить и упростить раму;
- увеличить диаметр ведущего колеса при сокращении общей длины велосипеда;
- изменить конструкцию руля;
- сделать абсолютно симметричным и более жестким и устойчивым ведущее колесо;
- устанавливать привод симметрично продольной оси велосипеда;
- заменить в некоторых конструкциях седло на профилированную поверхность цельной рамы;
- изменять техническую характеристику привода (имеющего одни и те же детали) за счет перестановки (при сборке) деталей с различными направлениями резьбы и/или перемены функций опорных и поворотных звеньев.
При одновременном действии рук и ног веломобилиста управление веломобилем осуществляется за счет наклона туловища при движении в сторону поворота. Использование привода в веломобилях, инвалидных колясках, водных велосипедах позволит создать большое количество разнообразных их конструкций.


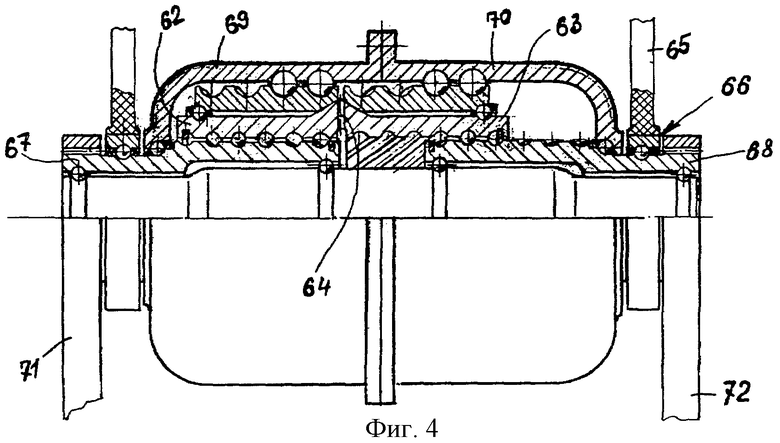
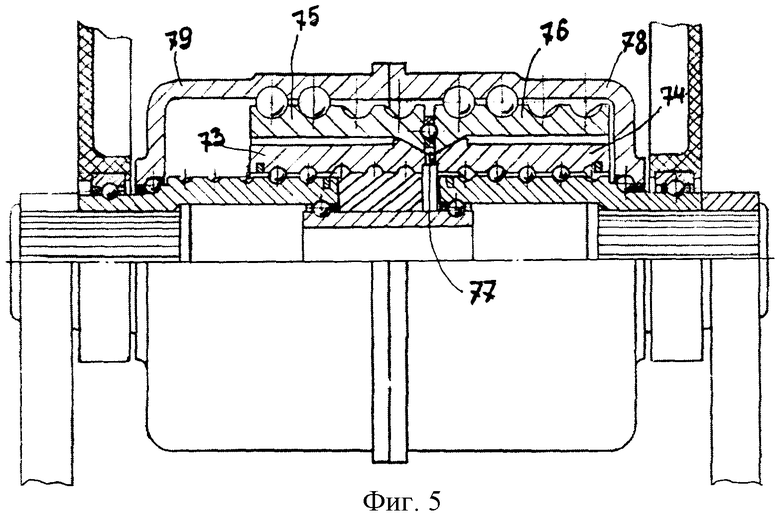
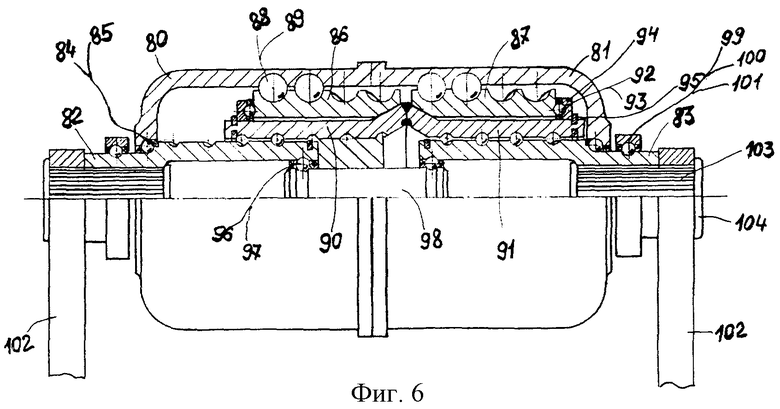

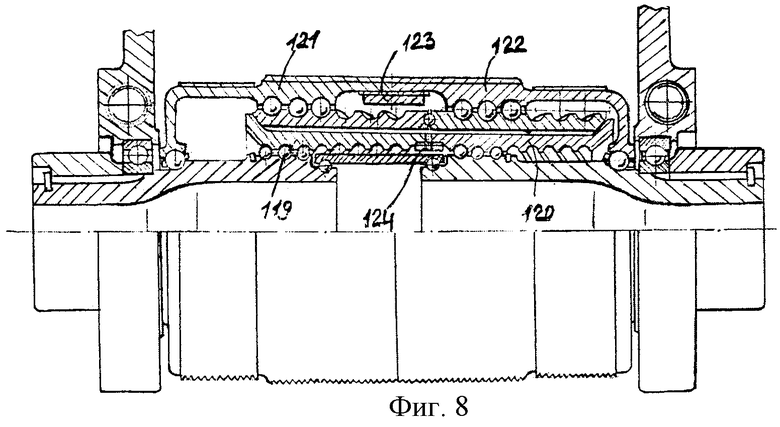

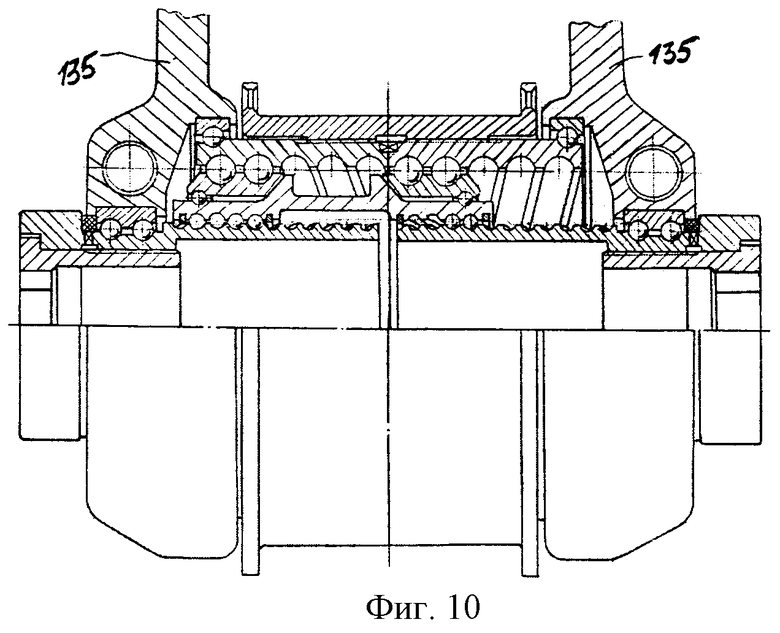




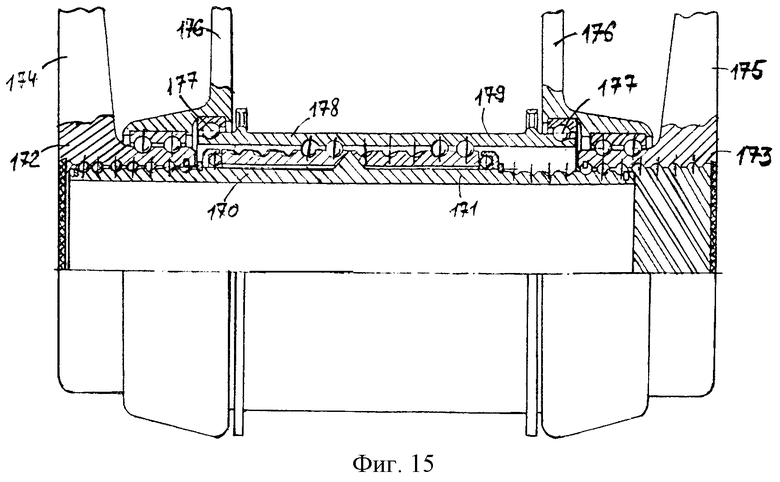


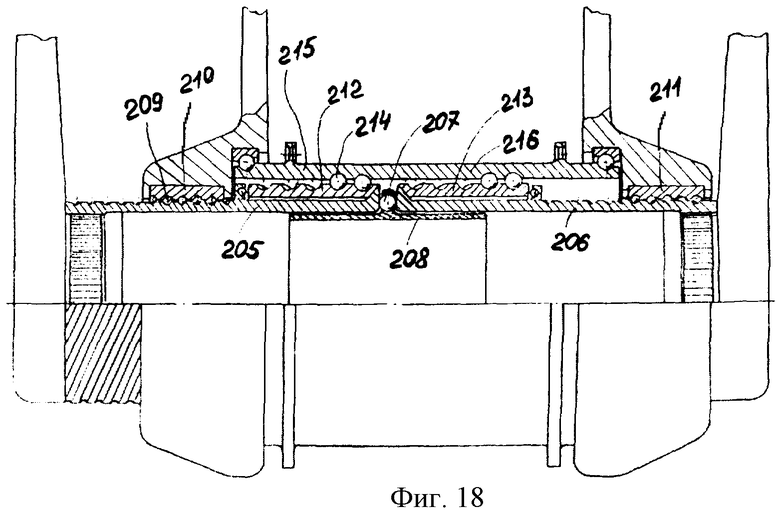
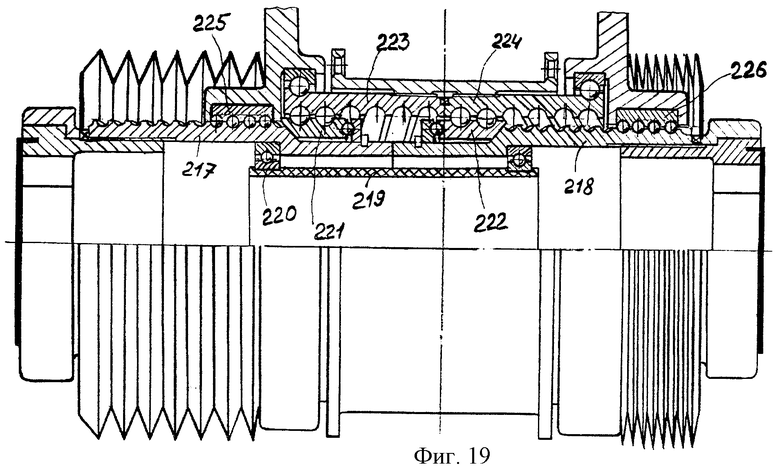

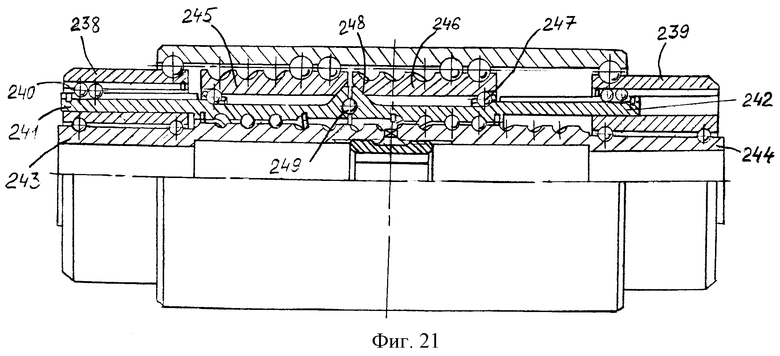
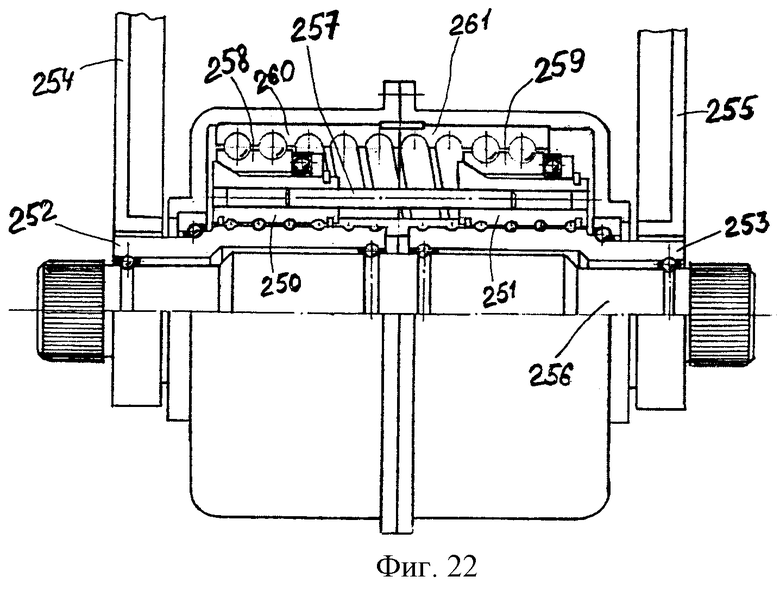
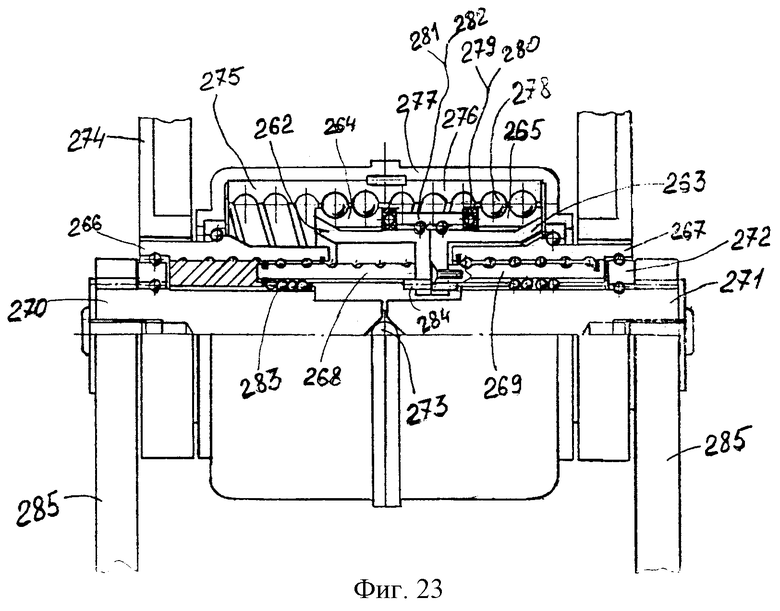
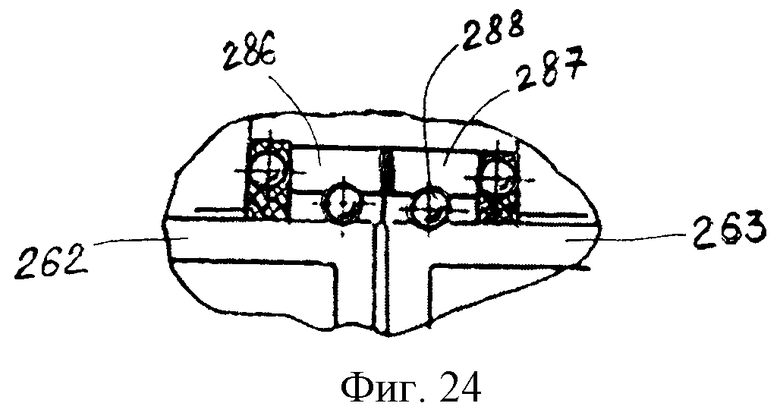


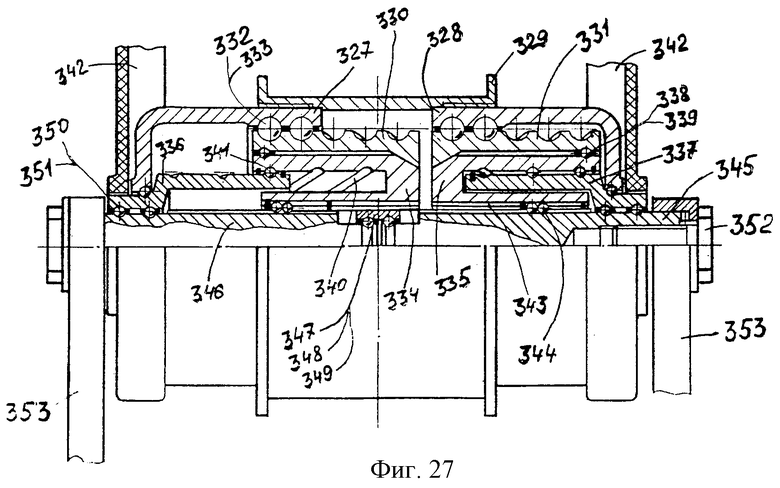


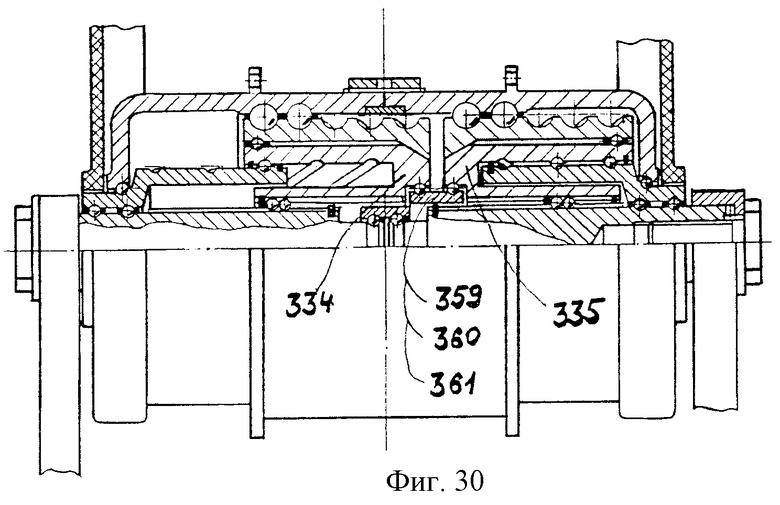









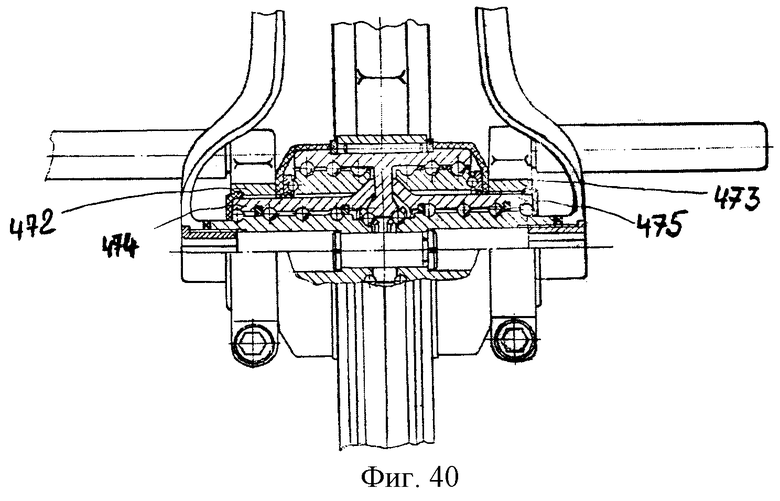
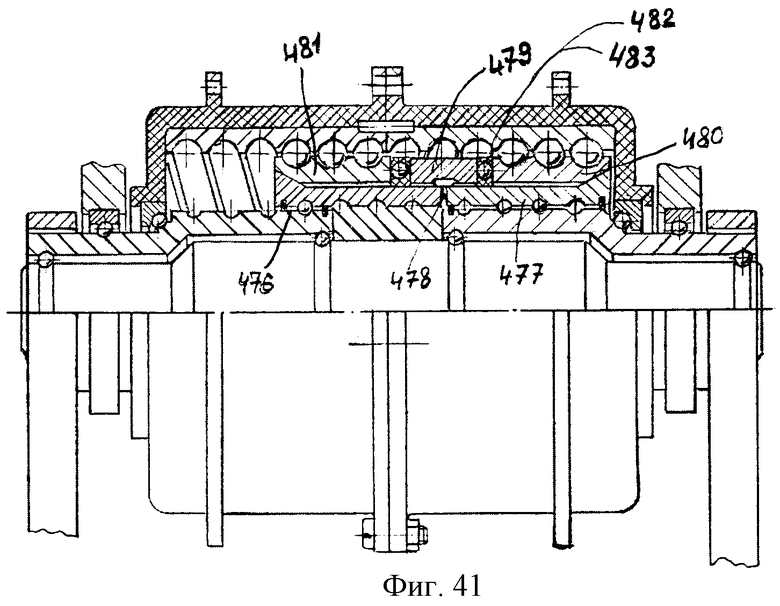

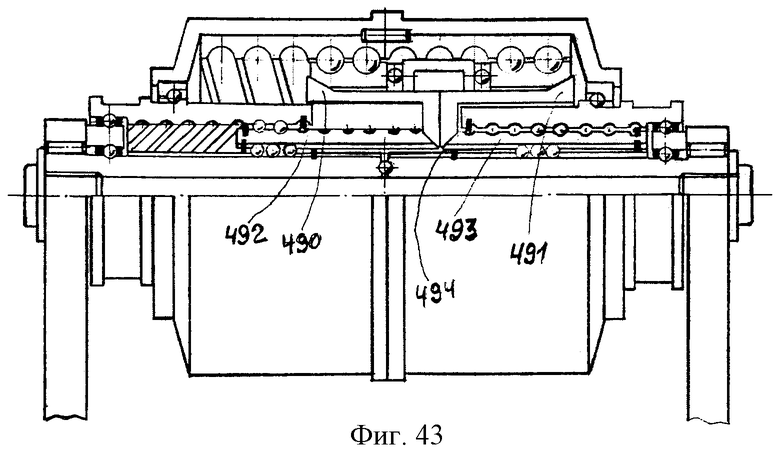
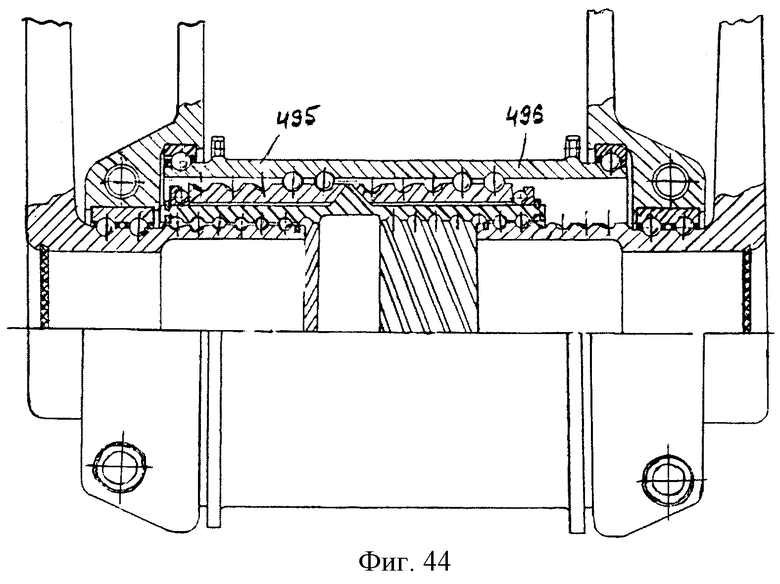

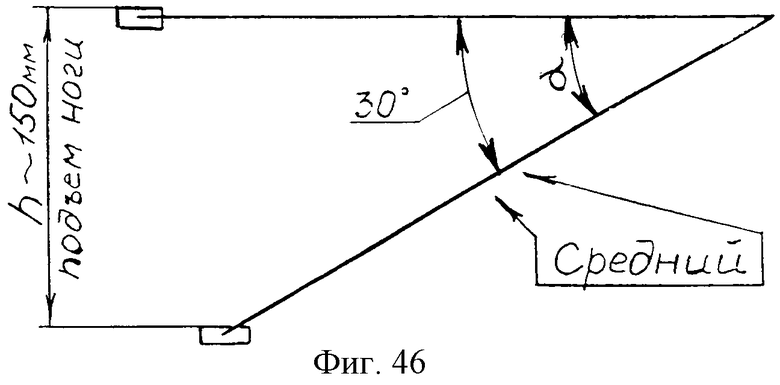

Изобретение относится к технике сообщения объекту вращательного движения, а более конкретно к адаптационному преобразователю механических движений. Устройство содержит коаксиально установленные винтовые передачи, две из которых являются преобразующими движение и содержат ведущие звенья и связанные с ними через тела качения ведомые звенья, одни из которых выполнены с винтовыми канавками, а другие - с кольцевыми канавками. Ведомые звенья жестко связаны между собой и со ступицей колеса транспортного средства, установлены с возможностью вращения вокруг своей оси и связаны с рамой транспортного средства. Две другие винтовые передачи с приводными рычагами, являющиеся приводными и служащие механизмом создания осевой силы и обеспечивающие создание крутящего момента и ускорения, содержат два приводных звена и два опорных звена, попарно связанных между собой посредством тел качения. Приводные звенья установлены с возможностью взаимодействия с ведущими звеньями преобразующих винтовых передач по поверхностям с трением качения и/или скольжения и связаны между собой с возможностью совместного движения. Опорные звенья связаны с приводными рычагами и установлены с возможностью поворота относительно оси привода и друг друга. Технический результат заключается в обеспечении выбора необходимых силовых режимов привода с наивысшим кпд передачи мускульной энергии от человека на привод. 55 з. п. ф-лы, 47 ил.
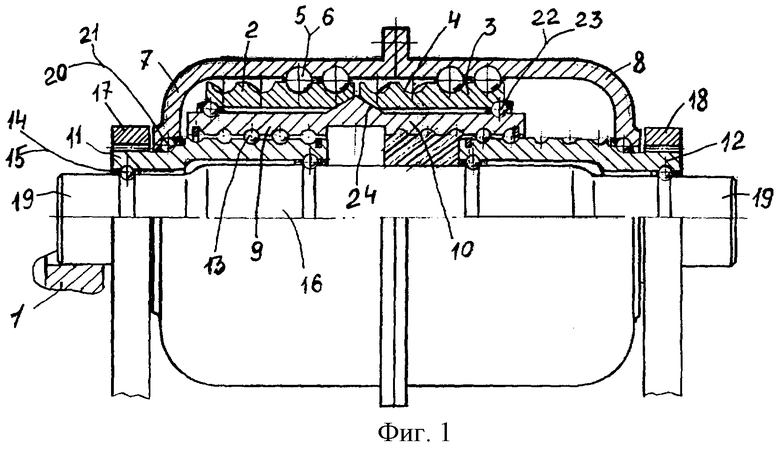
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1994 |
|
RU2083895C1 |
| US 4829841, 16.05.1989 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВАФЕЛЬ С КОФЕЙНЫМ АРОМАТОМ И ВКУСОМ (ВАРИАНТЫ) | 2010 |
|
RU2429662C1 |

