Изобретение относится к области машиностроения, в частности к способам и устройствам для преобразования возвратно-поступательного движения в одностороннее вращательное, что особенно используется в транспортном и энергетическом машиностроении.
Широко известен способ преобразования возвратно-поступательного движения в одностороннее вращательное, реализуемый в механизме типа "Юлы" посредством винтового механизма.
Этот способ заключается в том, что ведущее звено винтового механизма - винт стопорят в исходном положении, исключая его вращение, и перемещают вдоль оси вниз на величину хода. Тем самым преобразуют его поступательное движение во вращательное движение ведомого звена-гайки, при этом гайку стопорят под действием той же осевой приводной силы относительно корпуса, передавая ему вращение. После этого осуществляют возврат ведущего звена в исходное положение с перемещением его относительно ведомого под действием противоположно направленной осевой приводной силы. При этом ведомое звено под действием силы тяжести свинчивается вниз. При достижении ведущим звеном исходного верхнего положения цикл повторяют до достижения вращения ведомым звеном корпуса с заданными параметрами и расстопоряют ведущее звено.
Известное устройство для преобразования возвратно-поступательного движения в одностороннее вращательное типа "Юлы" (детский волчок БА-490-085, 1920 г. - прототип) содержит корпус, в котором вертикально установлен несамотормозящийся винтовой механизм. Его ведущее звено-винт снабжен рукояткой, через которую на винт воздействуют осевой приводной силой, ведомое звено выполнено в виде легкой гайки, размещенной на винте с возможностью взаимодействия с корпусом. При движении винта вниз его поступательное перемещение преобразуется во вращательное движение гайки, которое передается и корпусу. В это время (рабочий ход) момент трения (сцепление) между корпусом и гайкой больше, чем крутящий момент, возникающий между винтом и гайкой, а в винтовой паре нет самоторможения.
Перемещение винта вверх приводят его в исходное положение, осуществляя холостой ход, во время которого гайка за счет инерции в первоначальный момент вместе с винтом, а затем под действием собственного веса опускается по винту (свинчивается) вниз до соприкосновения с корпусом, то есть вращается относительно корпуса в противоположную сторону, тем самым возвращают гайку в исходное положение для последующего взаимодействия с винтом.
Оптимальная скорость движения винта вверх при холостом ходе должна быть приблизительно равна скорости, с которой гайка опускается вниз. Если скорость перемещения винта вверх меньше скорости перемещения гайки вниз, то гайка препятствует свободному вращению корпуса. Если скорость перемещения винта вверх больше скорости перемещения гайки вниз, то гайка не успевает опуститься до поверхности взаимодействия с корпусом и поэтому при движении винта часть его хода будет холостым, в результате скорость перемещения винта при холостом ходе ограничена скоростью схода гайки по винту.
Таким образом, возвратно-поступательное вертикальное перемещение винта за счет взаимодействующей с ним гайки преобразуется в одностороннее вращательное движение корпуса. Работоспособность этого устройства определяется цикличностью возвратно-поступательных движений. Поскольку возврат гайки по винту происходит за счет ее силы тяжести, то данная конструкция работает только в вертикальном положении и не обеспечивает способ получения непрерывного одностороннего вращения ведомого звена при любом пространственном расположении винтового механизма.
Задачей настоящего изобретения является разработка способа и устройства, обеспечивающих упрощение преобразования движения и расширение кинематических возможностей винтового механизма.
Поставленная задача решается тем, что в устройстве для преобразования возвратно-поступательного перемещения в одностороннее вращательное, содержащем корпус, установленный в нем несамотормозящийся винтовой механизм, ведущее звено которого связано с элементом приложения осевой силы, и ведомое звено, установленное с возможностью вращения вокруг своей оси, согласно изобретению, элемент приложения осевой силы выполнен в виде связанного с приводом дополнительного корпуса, устройство снабжено установленными в последнем соосно и зеркально основному дополнительным ведущим звеном и дополнительным элементом приложения осевой силы в виде втулки, связанной с дополнительным ведущим звеном, шариками и наружными кольцами по числу шариков, каждый элемент приложения осевой силы связан со своим ведущим звеном с возможностью свободного осевого перемещения вращения и стопорения, а ведомое звено имеет по меньшей мере два участка с резьбовой разного направления, при этом торцевые поверхности каждого ведущего звена и соответствующего элемента приложения осевой силы, обращенные одна к другой, выполнены фрикционными, а на наружной поверхности каждого ведущего звена, расположенной параллельно его продольной оси и обращенной к внутренней поверхности соответствующего элемента приложения осевой силы, выполнены канавки, в которых размещены шарики и наружные кольца.
Целесообразно, чтобы элементы приложения осевой силы ведущих звеньев были жестко закреплены в корпусе, а устройство было бы снабжено вторым дополнительным элементом приложения осевой силы, связанным с ведомым звеном, установленным с возможностью свободного вращения.
Устройство может быть снабжено механизмом для изменения осевой силы, связанным со вторым дополнительным элементом приложения осевой силы ведомого звена и выполненным либо в виде шарнирно-рычажной системы с плавным изменением соотношения плеч рычага, либо в виде управляемого силового цилиндра.
Поставленная задача решается также тем, что в способе преобразования возвратно-поступательного движения в одностороннее вращательное, осуществляемое посредством несамотормозящегося винтового механизма и заключающемся в том, что ведущее звено винтового механизма стопорят в исходном положении и перемещают вдоль оси винтового механизма на величину хода, затем осуществляют возврат ведущего звена в исходное положение, после чего цикл повторяют до достижения вращения с заданными параметрами и производят расстопорение ведущего звена, согласно изобретению, поочередно осуществляют стопорение и перемещение основного ведущего звена с одновременным расстопорением и принудительным возвратом в исходное положение дополнительного ведущего звена под действием одной осевой силы и расстопорение и принудительный возврат в исходное положение основного ведущего звена с одновременным стопорением и перемещением дополнительного ведущего звена под действием другой, противоположно направленной силы, при этом ведущие звенья перемещают по одному ведомому звену в одном направлении.
Предлагаемое изобретение дает возможность преобразования возвратно-поступательного перемещения в одностороннее непрерывное вращательное при любом пространственном расположении винтового механизма; получать один оборот ведомого звена при малых линейных перемещениях ведущего звена; изменять величину возвратно-поступательного перемещения ведущего звена в пределах его хода в любой момент времени и любом его положении с любой допустимой скоростью.
В конечном итоге изобретение позволит создавать приводы исполнительных механизмов, особенно в транспортном и энергетическом машиностроении, с повышенным КПД преобразования.
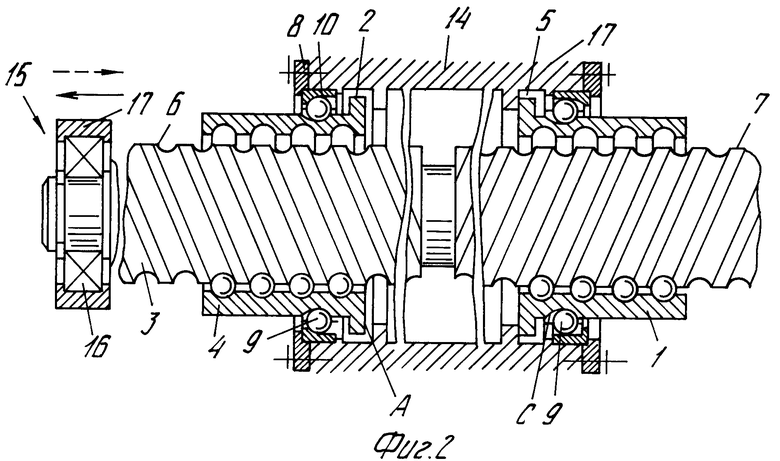
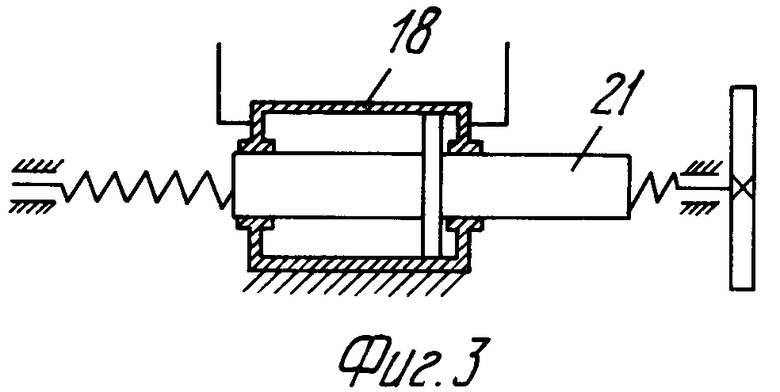
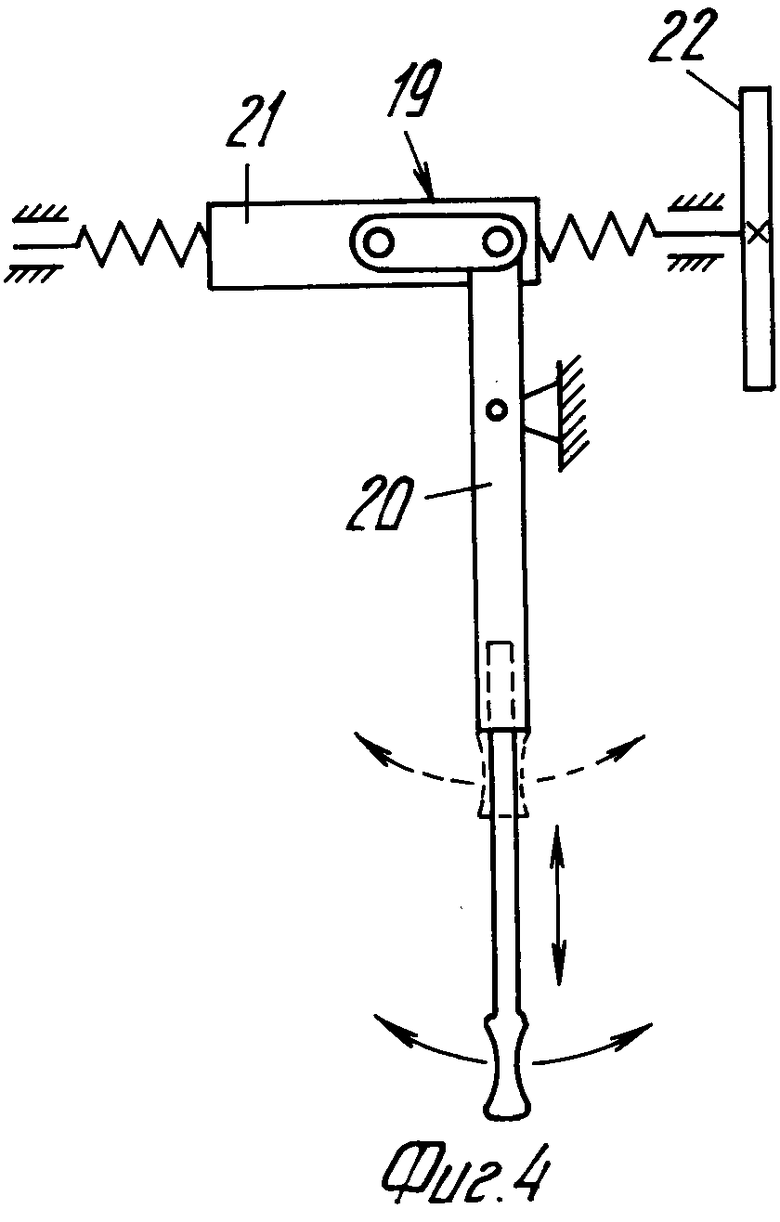
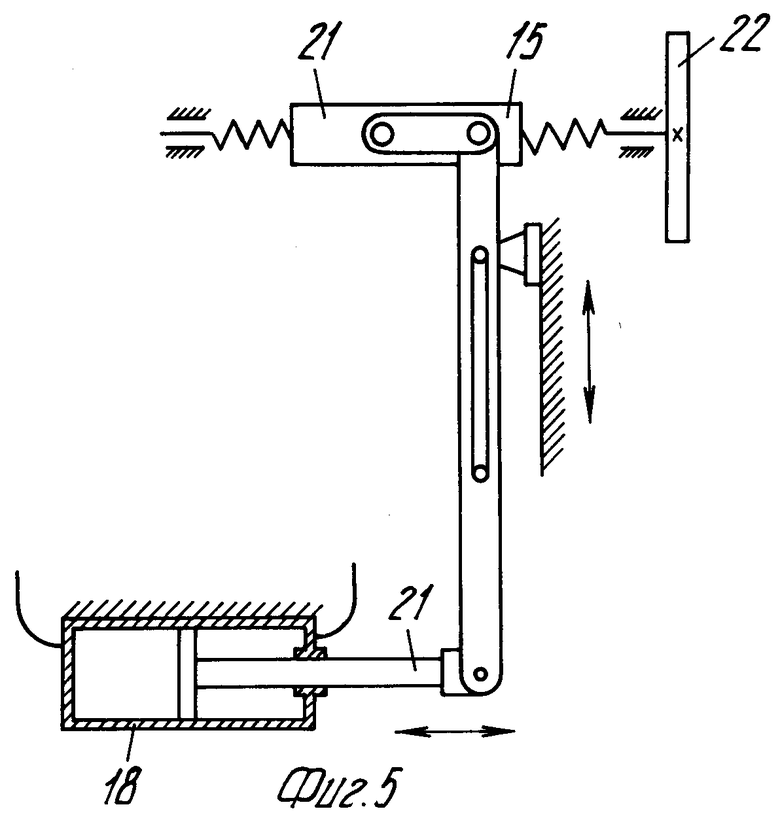
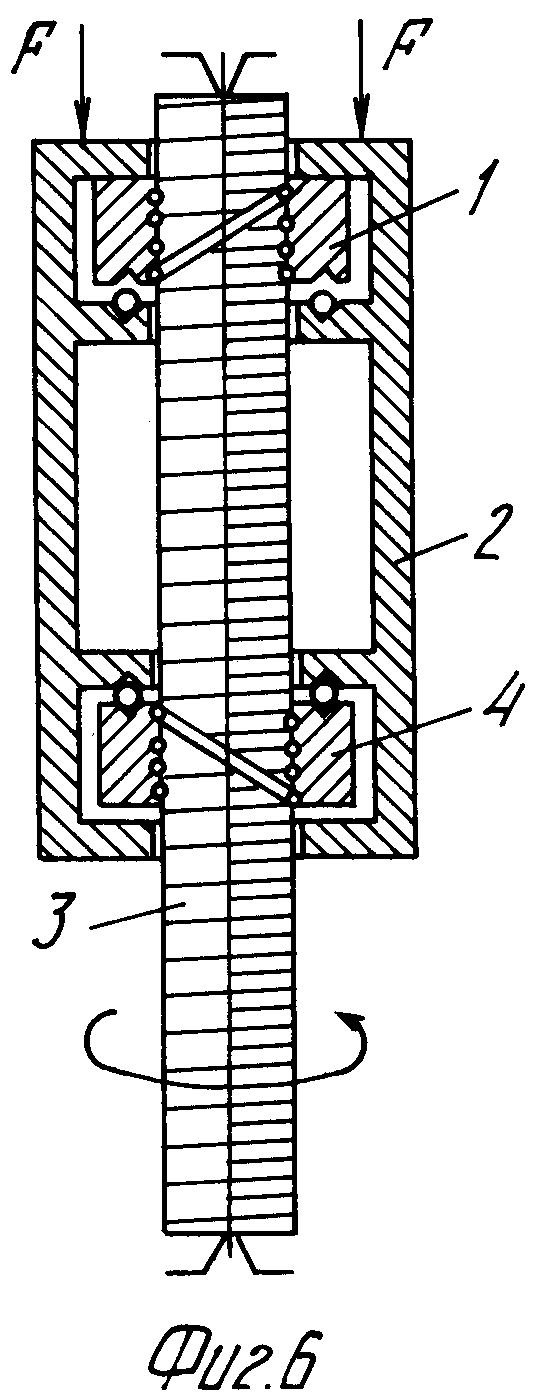
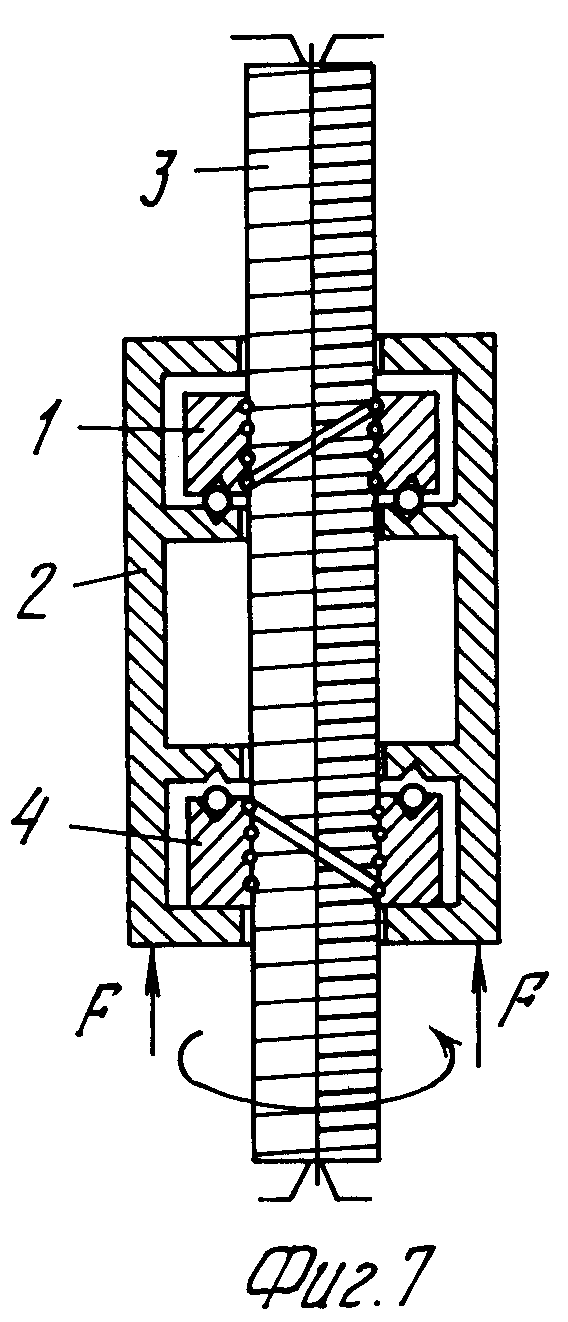
Изобретение поясняется чертежами, где на фиг. 1 изображена конструкция устройства для преобразования возвратно-поступательного движения в непрерывное одностороннее инерционное вращение ведомого звена, имеющего участки с резьбой разного направления, продольный разрез; на фиг. 2 - конструкция устройства для преобразования возвратно-поступательного движения в непрерывное возвратно-винтовое движение с односторонним вращением ведомого звена, продольный разрез; на фиг. 3 - один вариант выполнения механизма для изменения осевой силы в виде силового цилиндра; на фиг. 4 - другой вариант выполнения механизма для изменения осевой силы в виде шарнирно-рычажной системы; на фиг. 5 - третий вариант выполнения механизма для изменения осевой силы в виде шарнирно-рычажной системы с плавным изменением соотношений плеч рычага; на фиг. 6 - схема преобразования движения для получения непрерывного вращения ведомого звена при воздействии на ведущие звенья одной осевой силы при одном ее направлении; на фиг. 7 - схема преобразования движения для получения непрерывного вращения ведомого звена при воздействии на ведущие звенья одной осевой силы при другом ее направлении.
Устройство для преобразования возвратно-поступательного перемещения в одностороннее вращательное в виде установленного в корпусе несамотормозящегося винтового механизма содержит ведущее звено 1 (фиг. 1) с элементом 2 приложения осевой силы и ведомое звено 3, установленное с возможностью вращения вокруг своей оси. Устройство снабжено по меньшей мере одним дополнительным ведущим звеном 4 с индивидуальным элементом 5 приложения осевой силы в виде втулки. Ведомое звено 3 имеет не менее двух участков 6 и 7 с резьбой разного направления для перемещения ведущих звеньев 1 и 4 в одну сторону. Каждое ведущее звено 1 и 4 связано со своим элементом 2 и 5 приложения осевой силы с возможностью свободного осевого перемещения, свободного вращения и стопорения. Элементы 2 и 5 жестко связаны между собой и установлены в общем корпусе 8, связанным с приводом, который обеспечивает перемещение ведущих звеньев 1 и 4 по ведомому звену 3 одновременно в одном направлении.
Торцевые поверхности "A" каждого ведущего звена 1 и 4 и соответствующего элемента 2 и 5 приложения осевой силы, обращенные друг к другу для взаимодействия, выполнены фрикционными, а наружная поверхность "C" каждого ведущего звена 1 и 4, расположенная параллельно его продольной оси и обращенная к внутренней поверхности соответствующего элемента 2 и 5 приложения осевой силы, снабжена шариками 9 (телами качения) с наружными кольцами 10 (подшипников качения), предназначенными для взаимодействия между этими поверхностями, как опорными, и имеет по числу шариков 9 соответствующие канавки с осевой разбивкой.
Ведомое звено 3 установлено в корпусе 11 посредством подшипников 12 и связано с исполнительным органом 13. Кроме того, ведомое звено 3 может быть снабжено элементом 14 приложения осевой силы, выполненным в виде подшипника 15, установленного в корпусе 16, при этом элементы 2 и 5 приложения осевой силы жестко закреплены на стойке 17.
Для изменения параметров вращения ведомого звена 3 необходимо изменять величину действующей на него силы. Для этого в устройстве используют механизм изменения осевой силы, конструкции которого представлены на фиг. 3-5. Он может быть выполнен в виде либо управляемого силового цилиндра 18 (фиг. 3), либо в виде шарнирно-рычажной системы 19 (фиг. 4) с плавным изменением соотношений плеч рычага 20, который может быть шарнирно связан с подвижным элементом, например штоком 21 силового привода 22 (фиг. 5).
Предлагаемое устройство работает следующим образом.
Выполнение на наружной поверхности ведомого звена 3 (фиг. 1, 2) двух участков 6, 7 с резьбой разного направления и жесткое соединение элементов 2 и 5 ведущих звеньев 1 и 4 позволяет использовать воздействие одной осевой силы F, приводящее к совместному движению ведущих звеньев 1 и 4 в одном направлении, при котором одно из ведущих звеньев, например звено 4, застопорено и совершает поступательное движение, а другое, например звено 1, расстопорено и совершает винтовое движение по ведомому звену 3. Это дает возможность разместить элементы 2 и 5 в общем корпусе 8, при этом количество подшипников 9 для создания "скользких" поверхностей может быть сокращено до двух, а крепление их наружных колец 10 может быть выполнено как у цанги.
При правильно выбранном угле наклона винтовой линии, а также при соответствующем диаметре фрикционных поверхностей, в качестве материала стопорных поверхностей может служить сталь, из которой выполнено само ведущее звено 3. В качестве "скользких" поверхностей выбраны подшипники качения, хотя для других конструкций для создания "скользких" поверхностей могут быть использованы магнитная подушка, пневмоподушка, гидроопора и так далее.
Предлагаемый способ осуществляют с помощью вышеописанного устройства следующим образом. Получают непрерывное вращение ведомого звена 3 за счет воздействия одной осевой силой F (фиг. 6, 7) одновременно на два ведущих звена 1 и 4 при их движении в каждом направлении. При получении непрерывного вращения ведомого звена 3 его связь с инерционным элементом необязательна.
В устройстве поочередно осуществляют стопорение и перемещение основного ведущего звена 1 с одновременным расстопорением и принудительным возвратом в исходное положение дополнительного ведущего звена 4 при обеспечении его винтового движения относительно вращающегося ведомого звена 3 под действием одной осевой силы и расстопорение и принудительный возврат в исходное положение основного ведущего звена 1 при обеспечении его винтового движения относительно вращающегося ведомого звена 3 с одновременным стопорением и перемещением дополнительного ведущего звена 4 под действием другой, противоположно направленной осевой силы, при этом ведущие звенья 4 перемещаются по одному ведомому звену 3.
Величину каждой осевой силы F или F1 возможно изменять по заданному закону, который выбирают в зависимости от требуемых выходных характеристик вращения ведомого звена 3 - скорости вращения и крутящего момента.
Способ и устройство предназначены для преобразования осевого перемещения во вращательное. Ведущее звено 1 винтового механизма связано с возможностью свободного осевого перемещения и свободного вращения с узлом 2 приложения осевых сил и взаимодействует с ним по фрикционной поверхности или через тела качения. Под действием одной осевой силы поочередно осуществляют стопорение и перемещение основного ведущего звена с одновременным расстопорением и принудительным возвратом в исходное положение основного ведущего звена 1 с одновременным стопорением и перемещением дополнительного ведущего звена 4 - под действием другой, противоположно направленной осевой силы, что позволяет получать непрерывное одностороннее вращение с возможностью инерционного вращения ведомого звена, т.е. винта, или гайки, причем свободный ход образуется автоматически, 2 с. и 4 з.п.ф-лы, 7 ил.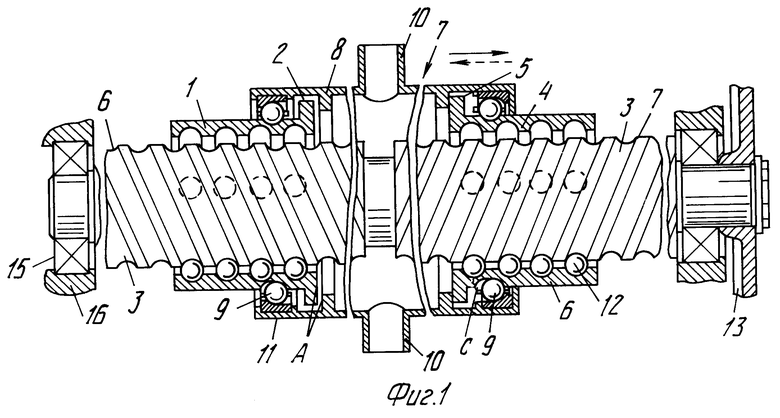
| Юла | |||
| Детский волчок | |||
| Регенеративный приемник | 1923 |
|
SU490A1 |
| Контактный детектор | 1924 |
|
SU1920A1 |
