Изобретение относится к области машиностроения, в частности к способам и устройствам для преобразования возвратно-поступательного движения в одностороннее вращательное, что особенно используется в транспортном и энергетическом машиностроении.
Широко известен способ преобразования возвратно-поступательного движения в одностороннее вращательное, реализуемый в механизме типа "Юлы" посредством винтового механизма.
Этот способ заключается в том, что ведущее звено винтового механизма - винт стопорят в исходном положении, исключая его вращение, и перемещают вдоль оси вниз на величину хода. Тем самым преобразуют его поступательное движение во вращательное движение ведомого звена-гайки, при этом гайку стопорят под действием той же осевой приводной силы относительно корпуса, передавая ему вращение. После этого осуществляют возврат ведущего звена в исходное положение с перемещением его относительно ведомого под действием противоположно направленной осевой приводной силы. При этом ведомое звено под действием силы тяжести свинчивается вниз. При достижении ведущим звеном исходного верхнего положения цикл повторяют до достижения вращения ведомым звеном корпуса с заданными параметрами и расстопоряют ведущее звено.
Известное устройство для преобразования возвратно-поступательного движения в одностороннее вращательное типа "Юлы" - детский волчок содержит корпус, в котором вертикально установлен несамотормозящийся винтовой механизм, его ведущее звено-винт снабжен рукояткой, через которую на винт воздействуют осевой приводной силой; ведомое звено выполнено в виде легкой гайки, размещенной на винте с возможностью взаимодействия с корпусом. При движении винта вниз его поступательное перемещение преобразуется во вращательное движение гайки, которое передается и корпусу. В это время (рабочий ход) момент трения (сцепление) между корпусом и гайкой больше, чем крутящий момент, возникающий между винтом и гайкой, а в винтовой паре нет самоторможения.
Перемещением винта вверх приводят его в исходное положение, осуществляя холостой ход, во время которого гайка за счет инерции собственного веса опускается по винту (свинчивается) вниз до соприкосновения с корпусом, то есть вращается относительно корпуса в противоположную сторону, тем самым возвращает гайку в исходное положение для последующего взаимодействия с винтом.
Оптимальная скорость движения винта вверх при холостом ходе должна быть приблизительно равна скорости, с которой гайка опускается вниз. Если скорость перемещения винта вверх меньше скорости перемещения гайки вниз, то гайка препятствует свободному вращению корпуса. Если скорость перемещения винта вверх больше скорости перемещения гайки вниз, то гайка не успевает опуститься до поверхности взаимодействия с корпусом и поэтому при движении винта часть его хода будет холостым и скорость перемещения винта при холостом ходе ограничена скоростью схода гайки по винту.
Таким образом, возвратно-поступательное вертикальное перемещение винта за счет взаимодействующей с ним гайки преобразуется в одностороннее вращательное движение корпуса. Работоспособность этого устройства определяется цикличностью возвратно-поступательных движений. Поскольку возврат гайки по винту происходит за счет ее силы тяжести, то данная конструкция работает только в вертикальном положении и не обеспечивает получения непрерывного одностороннего вращения ведомого звена при любом пространственном расположении винтового механизма.
Задачей изобретения является разработка способа и устройства, обеспечивающих упрощение преобразования движения и расширение кинематических возможностей винтового механизма.
Поставленная задача решается тем, что в устройстве, содержащем корпус, установленный в нем несамотормозящийся винтовой механизм, включающий ведущее звено, связанное с элементом приложения осевой силы, и ведомое звено, установленное с возможностью вращения вокруг осевой оси, согласно изобретению ведомое звено на своей наружной поверхности имеет резьбу одного направления, а устройство снабжено шариками с наружными кольцами, по меньшей мере одним дополнительным ведущим звеном, дополнительным элементом приложения осевой силы, связанным с дополнительным ведущим звеном, причем элементы приложения осевых сил ведущих звеньев связаны с приводом с возможностью из перемещения по ведомому звену в противоположных направлениях, каждый элемент приложения осевой силы выполнен в виде корпуса, в котором соосно установлено соответствующее ведущее звено с возможностью свободного осевого перемещения, свободного вращения и стопорения, торцевые поверхности каждого ведущего звена и соответствующего элемента приложения осевой силы, обращенные одна к другой и предназначенные для взаимодействия одна с другой, выполнены фрикционными, а наружная поверхность каждого ведущего звена, расположенная параллельно его продольной оси и обращенная к внутренней поверхности соответствующего элемента приложения осевой силы, имеет канавки с осевой разбивкой, в которых расположены шарики с наружными кольцами, предназначенные для взаимодействия этих поверхностей как опорных.
Поставленная задача решается также тем, что в способе преобразования возвратно-поступательного движения в одностороннее вращательное, осуществляемом посредством несамотормозящегося винтового механизма стопорят в исходном положении и перемещают вдоль оси винтового механизма на величину хода, затем осуществляют возврат ведущего звена в исходное положение, после чего циклы повторяются до достижения вращения с заданными параметрами и производят расстопорение ведущего звена, согласно изобретению поочередно под действием противоположно направленных двух осевых сил осуществляют стопорение и перемещение основного ведущего звена с односторонним расстопорением и принудительным возвратом в исходное положение дополнительного ведущего звена и расстопорение и принудительный возврат в исходное положение основного ведущего звена с одновременным стопорением и перемещением дополнительного ведущего звена, при этом ведущие звенья перемещают по одному ведомому звену во взаимопротивоположных направлениях.
Предлагаемое изобретение дает возможность преобразования возвратно-поступательного перемещения в одностороннее непрерывное вращательное при любом пространственном расположении винтового механизма. Устройство позволяет получать непрерывное одностороннее вращение ведомого звена за счет одновременного действия на два ведущих звена противоположно направленными осевыми силами при одном ведомом. В конечном итоге изобретение позволяет создать приводы исполнительных механизмов, особенно в транспортном и энергетическом машиностроении, с повышенным КПД преобразования.
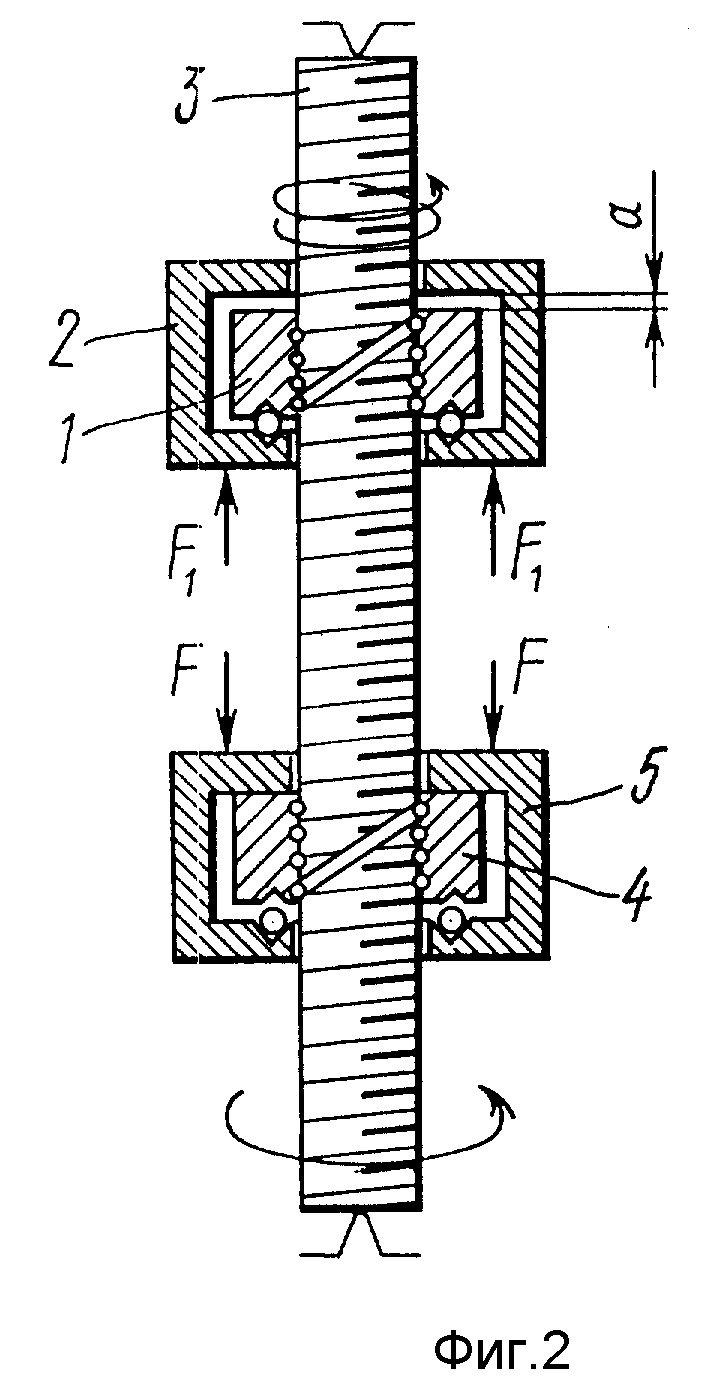
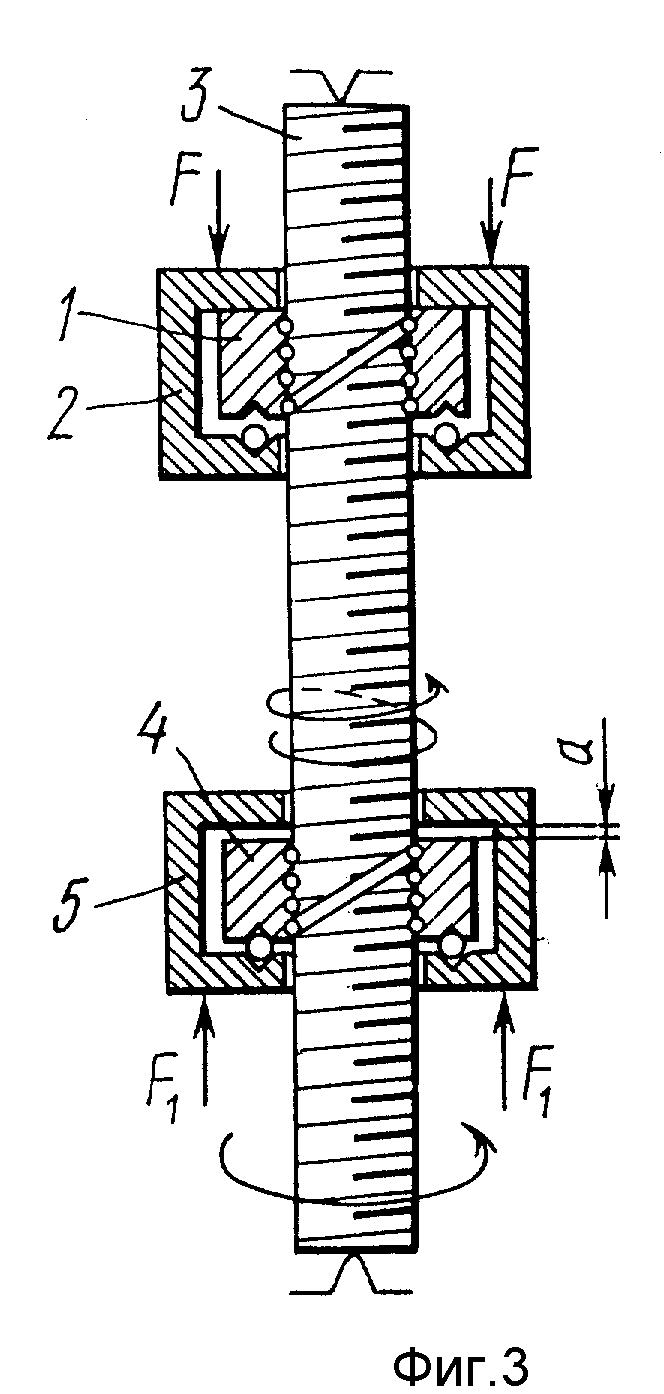
На фиг. 1 изображена конструкция устройства для преобразования возвратно-поступательного движения в непрерывное одностороннее инерционное вращение ведомого звена с резьбой одного направления по всей его длине, продольный разрез; на фиг. 2 - схема преобразования движений для получения непрерывного вращения ведомого звена при воздействии на ведущие звенья двух осевых сил, направленных друг от друга; на фиг. 3 - схема преобразования движений для получения непрерывного вращения ведомого звена при воздействии на ведущие звенья двух осевых сил, направленных друг к другу.
Устройство для преобразования возвратно-поступательного движения во вращательное выполнено в виде несамотормозящегося винтового механизма, в качестве которого могут быть использованы винтовые передачи с малым трением скольжения или винтовые передачи качения. Для получения вращения ведомого звена с высокими скоростями и небольшими крутящими моментами предпочтительно использовать винтовые передачи, выполненные шарикоподшипниковыми.
Винтовой механизм (фиг. 1) содержит ведущее звено 1 в виде гайки с элементом 2 приложения осевой силы, ведомое звено 3 в виде винта. Кроме того, это устройство снабжено дополнительным ведущим звеном 4 с индивидуальным элементом 5 приложения осевой силы. Это дополнительное ведущее звено 4 выполнено идентично ведущему звену 1 и соосно и зеркально с ним установлено на ведомом звене 3.
Каждый элемент 2 и 5 имеет закрепленные в корпусе 6 цапфы 7 для его связи с приводом (на фиг. не показан), обеспечивающим возвратно-поступательное перемещение ведущих звеньев 1 и 4 во взаимно противоположных направлениях по ведомому звену 3, имеющему на наружной поверхности по всей длине резьбу одного направления. Каждый из элементов 2 и 5 содержит установленные в корпусе 6 подшипники 8 качения (снабжены телами качения), кольца которых имеют канавки с осевой разбивкой. Наружные кольца подшипников 8 установлены в корпусе 6 неподвижно, а внутренними кольцами являются сами ведущие звенья 1 и 4, точнее их наружные поверхности "C", кольцевые канавки которых выполнены также с осевой разбивкой. Каждое ведущее звено 1 и 4 имеет выступ 9, при этом торцевые поверхности "A" выступа 9 и корпуса 6 элемента 2 или 5, обращенные друг к другу, выполнены фрикционными. Ведомое звено 3 установлено в корпусе 10 посредством подшипников 11 и связано с исполнительным органом 12.
Устройство с двумя ведущими звеньями 1 и 4 (фиг. 1) при одном ведомом звене 3 в виде винта с резьбой одного направления по всей его длине работает следующим образом.
На элементы 2 и 5 одновременно действуют двумя силами F и F1, направленными от центра в разные стороны. При этом действие силы F от элемента 5 передается на ведущее звено 4 через его фрикционную поверхность "A", перемещая его в направлении от центра. При действии силы F1 на элемент 2 его корпус 6 вместе с закрепленными на нем кольцами подшипника 8 за счет осевой разбивки из канавок в начальный момент прокатывается по шарикам, образуя между стопорными поверхностями элемента 2 и ведущего звена 1 зазор "m", в результате чего в дальнейшем действие силы F1 передается на ведущее звено 1 через его "скользкую" поверхность "C", образуемую радиально-упорным шарикоподшипником 8. Под действием силы F1 ведущее звено 1 будет совершать винтовое движение относительно вращающегося ведомого звена 3. Затем меняют направление действия сил F и F1, при этом происходит стопорение ведущего звена 1, которое начинает поступательно перемещаться вдоль ведомого звена 3, вращая его, и расстопорение ведущего звена 4, которое начинает совершать ускоренное винтовое движение по вращающемуся ведомому звену 3, перемещаясь в исходное положение. Таким образом, обеспечивая возвратно-поступательное перемещение ведущих звеньев 1 и 4 во взаимопротивоположных направлениях, получают одностороннее непрерывное вращение ведомого звена 3 с требуемой скоростью.
Способ преобразования возвратно-поступательного движения в непрерывное одностороннее вращение осуществляют с помощью предлагаемого устройства следующим образом.
Для получения непрерывного одностороннего вращения ведомого звена 3 (фиг. 2), имеющего резьбу одного направления, осевыми силами F и F1 действует одновременно на два ведущих звена 1 и 4. Эти силы F и F1 равны по величине и направлены в противоположные стороны. Возможно и воздействие на ведущие звенья 1 и 4 силами разной величины. Под действием этих сил F и F1 элементы 2 и 5 для приложения осевых сил действуют одновременно на соответствующие ведущие звенья 1 и 4: на ведущее звено 1 - по "скользкой" поверхности "C", то есть осуществляют его расстопорение и винтовое перемещение вверх относительно ведомого звена 3, тем самым совершая возврат в исходное положение ведущего звена 1, а на ведущее звено 4 - по фрикционной поверхности "A", то есть осуществляют его стопорение и одновременное перемещение его вниз, тем самым преобразуя поступательное движение ведущего звена 1 во вращательное движение ведомого звена 3. После этого меняют направление действующих осевых сил F и F1 (фиг. 3), при этом осевая сила F1, требуемая для возврата ведущего звена 1 или 4 в исходное положение, может быть много меньше силы F, поскольку статический момент инерций возвращаемого ведущего звена 1 или 4 мал. В результате этого ведущее звено 1 осуществляет вращение ведомого звена 3, в то время как ведущее звено 4 возвращается в исходное положение. Цикл повторяется до достижения вращения с заданными параметрами.
Таким образом, поочередно под действием противоположно направленных двух осевых сил осуществляют стопорение и перемещение основного ведущего звена 1 с одновременным расстопорением и принудительным возвратом в исходное положение дополнительного ведущего звена 4 при обеспечении его винтового движения относительно вращающегося ведомого звена 3, а также расстопорение и принудительный возврат в исходное положение основного ведущего звена 1 при обеспечении его винтового движения относительно вращающегося ведомого звена 3 с одновременным стопорением и перемещением дополнительного ведущего звена 4, при этом ведущие звенья 1 и 4 перемещаются по одному ведомому звену 3 во взаимопротивоположных направлениях.
При этом осуществляют непрерывное вращение ведомого звена 3 с требуемыми параметрами. За счет действия осевых сил F и F1, различных по направлению и величине, возможно использование предлагаемого способа при применении с различными приводами.
Способ и устройство относятся к области преобразования возвратно-поступательного движения в одностороннее вращательное. Ведущее звено 1 винтового механизма связано с узлом 2 приложения осевых сил и взаимодействует с ним по фрикционной поверхности или через тела качения. Под действием противоположно направленных двух осевых сил поочередно стопорят ведущее звено 1 и перемещают его на величину хода с одновременным расстоянием и принудительным возвратом в исходное положение дополнительного ведущего звена 4. При этом ведущие звенья 1 и 4 перемещают по одному ведомому звену 3 во взаимно противоположных направлениях. Величину осевой силы выбирают так, что реактивный момент инерции ведущего звена меньше статического и динамического момента инерции ведомого звена 3, что позволяет получать непрерывное одностороннее вращение с возможностью инерционного вращения ведомого звена 3, винта или гайки, при этом свободный ход образуется автоматически. 2 с.п. ф-лы, 3 ил.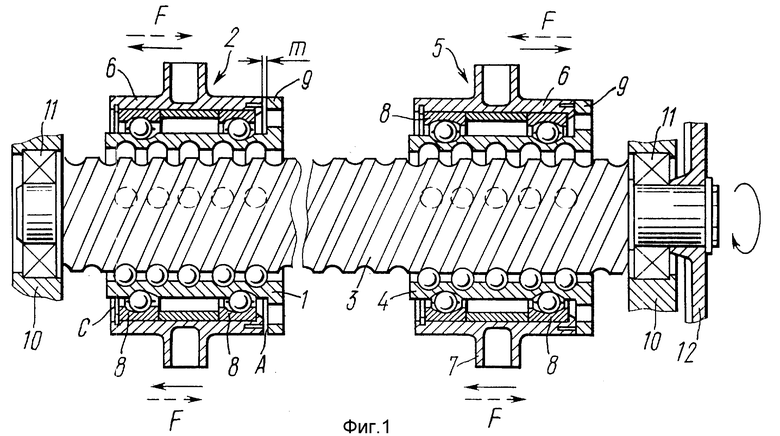
| Юла | |||
| Детский волчок | |||
| Регенеративный приемник | 1923 |
|
SU490A1 |
