Изобретение относится к электротехнике, в частности к позиционным электроприводам постоянного тока, и может быть использовано для автоматизации металлорежущих станков, электромеханических роботов и других механизмов.
Известен позиционный электропривод, содержащий электродвигатель постоянного тока, подключенный к преобразователю, блок задания, интегратор и регулятор, выход которого подключен к входу преобразователя, и сумматор (авт. св. СССР N 1367120).
Недостатком описанного позиционного электропривода является его сравнительно низкое быстродействие по отношению к управляющему воздействию и наличие динамической ошибки в переходных режимах вследствие аппроксимации передаточной функции позиционного электропривода динамическим звеном второго порядка.
Сущность изобретения заключается в том, что в позиционный электропривод, содержащий электродвигатель постоянного тока, подключенный к силовому преобразователю, блок ввода задания, интегратор и пропорционально-дифференциальный регулятор, выход которого подключен к входу силового преобразователя, датчик положения, выход которого соединен с первыми входами интегратора и пропорционально-дифференциального регулятора, два сумматора и дифференциальное звено, причем выход блока ввода задания соединен с входом дифференциального звена и первым входом первого сумматора, выход интегратора соединен с первым входом второго сумматора, дополнительно введено форсирующее звено, причем его вход соединен с дифференциальным звеном, а выход подключен к второму входу второго сумматора, выход которого соединен с вторым входом первого сумматора, выход которого подключен к второму входу пропориционально-дифференциального регулятора, а выход блока ввода задания соединен с вторым входом интегратора.
Существенные отличия находят свое выражение в новой совокупности связей между отдельными блоками устройства. Указанная совокупность связей позволяет повысить быстродействие позиционного электропривода по управляющему воздействию и точность его работы в динамических режимах.
На фиг. 1 приведена функциональная схема позиционного электропривода; на фиг. 2 - структурные схемы позиционного электропривода.
Позиционный электропривод (фиг. 1) содержит блок ввода задания 1, дифференциальное 2 и форсирующее 3 звенья, интегратор 4, первый 6 и второй 5 сумматоры, последовательно соединенные пропорционально-дифференциальный регулятор 7, силовой преобразователь 8, электровигатель постоянного тока с исполнительным механизмом 9, датчик положения 10, выход которого соединен с первыми входами интегратора 4 и пропорционально-дифференциального регулятора 7. Выход блока ввода задания 1 соединен с первым входом первого сумматора 6, с входом дифференциального звена 2 и вторым входом интегратора 4. Выход дифференциального звена 2 через форсирующее звено 3 соединен с вторым входом второго сумматора 5. Выход интегратора 4 соединен с первым входом второго сумматора 5, выход которого подключен к второму входу первого сумматора 6. Выход сумматора 6 соединен с вторым входом пропорционально-дифференциального регулятора 7.
Позиционный электропривод может быть реализован следующим образом. Блок ввода задания 1, например, выполнен на регистрах К155ТМ8, к информационным входам которых подключены переключатели, например, типа П2К. Сумматоры 5 и 6, например, выполнены на микросхемах 155ИМ3. Интегратор 4, форсирующее звено 3 и пропорционально-дифференциальный регулятор 7, например, реализованы по авт. св. СССР N 938253 ( Б.И. N 23, 1982 г.). Силовой преобразователь 8, например, представляет собой широтно-импульсный модулятор, например, по авт. св. СССР N 1095385 (Б.И. N 20, 1984 г.), который работает на транзисторный мост. Электродвигатель 9 постоянного тока, например, типа ДПУ-240. Датчик положения 10, например, типа IRC-III с соответствующим преобразователем последовательностей импульсов в код. Дифференциальное звено 2, например, реализовано по авт. св. СССР N 1515988 (приоритет 10.03.88 г.).
Анализ структурной схемы позиционного электропривода (фиг. 2а) показывает, что связь между его выходным Xвых и входным Xвх сигналами безинерционна. Действительно, электродвигатель постоянного тока с исполнительным механизмом можно представить передаточной функцией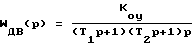
где
T1 и T2 - постоянные времени, являющиеся функциями активного сопротивления Rя, индуктивности Lя якорной цепи, моментов инерции Jдв двигателя и Jим исполнительного механизма, причем, для определенности, T1>T2;
p - оператор Лапласа;
Kоу - коэффициент передачи двигателя с исполнительным механизмом.
Силовой преобразователь, работающий по принципу широтно-импульсной модуляции, с частотой коммутации более 1 кГц, можно представить безинерционным звеном Wсп(p) = Kсп.
Передаточная функция пропорционально-дифференциального регулятора
Wпд(p) = Кпд(Tпд(p) + 1)
Дифференциальное и форсирующее звенья описываются соответствующими передаточными функциями: Wд(p) = KдP; Wф(p) = Tфp + 1
После структурных преобразований (фиг. 2б) получаем следующий вывод, что передаточная функция позиционного электропривода по управлению имеет вид безинерционного звена:
W(p) = 1/ Kдп (1).
При этом передаточная функция прототипа
где
K1 - добротность внутреннего контура, K1 = KпдKспKоуKдп.
Сравнение выражений (1) и (2) показывает, что, например, при подаче на вход задающего воздействия типа Xзад(p) = a2/pз (изменение входного воздействия с постоянной скоростью a2 изменения ускорения) ошибка в предложенном позиционном электропривода равна нулю, а в прототипе
при этом значение установившейся ошибки
εуст = TиT2K
Кроме того, выражения (1) и (2) показывают, что быстродействие предложенного позиционного электропривода при подаче единичного ступенчатого воздействия стремится к бесконечности, а в прототипе определяется соотношением постоянных времени э
э
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПЛОСКОЙ ЗАГОТОВКИ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1991 |
|
RU2032996C1 |

Использование: для автоматизации металлорежущих станков, электромеханических роботов и других механизмов. Сущность: позиционный электропривод содержит блок ввода задания, дифференциальное и форсирующие звенья, интегратор, сумматоры и последовательно соединенные пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель постоянного тока с исполнительным механизмом и датчик положения. Это позволяет повысить быстродействие по управляющему воздействию и точность работы в динамических режимах позиционного электропривода. 2 ил.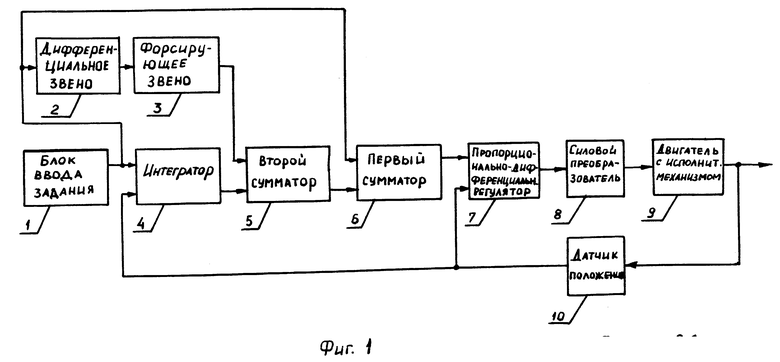
Позиционный электропривод, содержащий электродвигатель постоянного тока, подключенный к силовому преобразователю, блок ввода задания, интегратор, пропорционально-дифференциальный регулятор, выход которого подключен к входу силового преобразователя, датчик положения, выход которого соединен с первыми входами интегратора и пропорционально-дифференциального регулятора, два сумматора и дифференциальное звено, причем выход блока ввода задания подключен к входу дифференциального звена и первому входу первого сумматора, выход интегратора соединен с первым входом второго сумматора, отличающийся тем, что в него дополнительно введено форсирующее звено, вход которого соединен с выходом дифференциального звена, а его выход подключен к второму входу второго сумматора, выход которого соединен с вторым входом первого сумматора, выход которого подключен к второму входу пропорционально-дифференциального регулятора, а выход блока ввода задания соединен с вторым входом интегратора.
| SU, авторское свидетельство, 1367120, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
