Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с исполнительными двигателями постоянного тока или с синхронными машинами, работающими в режимах вентильного двигателя или бесколлекторного двигателя постоянного тока.
Наиболее близким по технической сущности является структурно-минимальный электропривод (см. Галицков С.Я., Галицков К.С. Многоконтурные системы управления с одной измеряемой координатой. - Самара: СГАСУ, 2004. - С.64-65), содержащий блок задания, первый и второй сумматор, блок дифференцирования, пропорциональное звено, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель и датчик положения.
Недостаток наиболее близкого по технической сущности следящего электропривода заключается в том, что он обладает малой полосой пропускания частот, составляющей порядка 30-40 Гц.
Сущность изобретения состоит в том, что следящий электропривод, содержащий блок задания, первый и второй сумматор, первый блок дифференцирования, пропорциональное звено, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель с исполнительным механизмом и датчик положения, причем выход блока задания соединен с первым входом первого сумматора и входом первого блока дифференцирования, выход которого соединен с вторым входом первого сумматора и входом пропорционального звена, выход первого сумматора соединен с первым входом интегрального регулятора, выход которого соединен с первым входом второго сумматора, выход пропорционального звена соединен с вторым входом второго сумматора, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, выход которого соединен с электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторым входом интегрального регулятора, дополнительно снабжен пропорциональным регулятором и вторым блоком дифференцирования, причем выход второго сумматора соединен с первым входом пропорционального регулятора, выход которого соединен с первым входом пропорционально-дифференциального регулятора, выход датчика положения соединен с вторым входом пропорционального регулятора и входом второго блока дифференцирования, выход которого соединен с вторым входом пропорционально-дифференциального регулятора.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет увеличить полосу пропускания частот следящего электропривода.
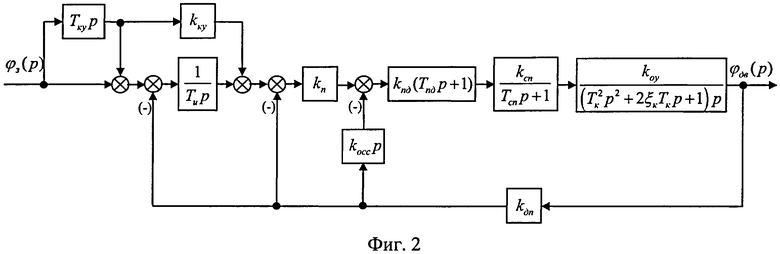
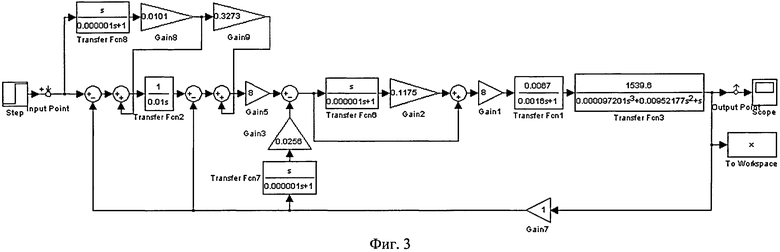
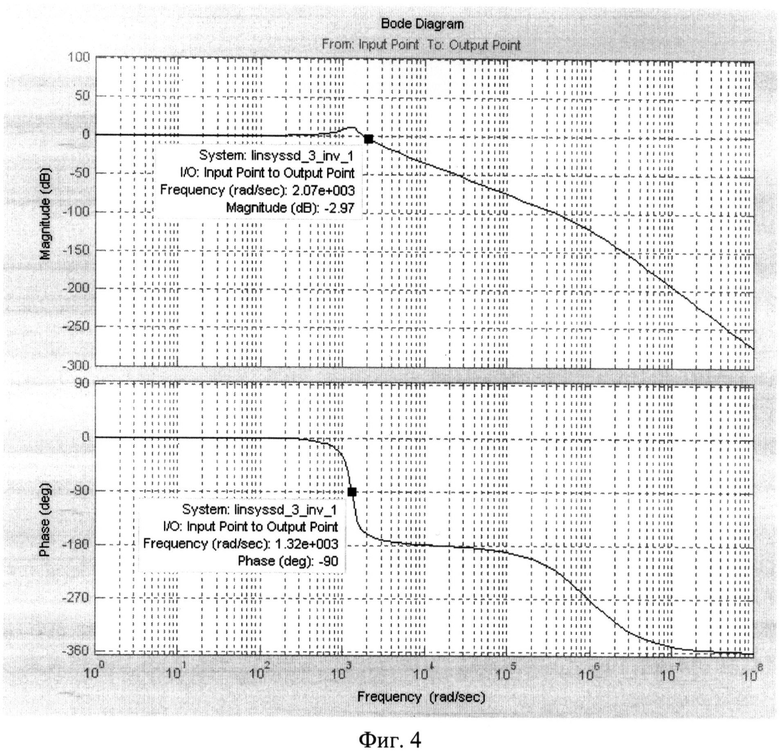
На фиг.1 приведена функциональная схема следящего электропривода; на фиг.2 - структурная схема следящего электропривода, на фиг.3 - расчетная модель следящего электропривода; на фиг.4 - частотные характеристики следящего электропривода.
Следящий электропривод (фиг.1) содержит блок 1 задания, сумматоры 2 и 3, блоки 4 и 5 дифференцирования, пропорциональное звено 6, интегральный регулятор 7, пропорциональный регулятор 8, пропорционально-дифференциальный регулятор 9, силовой преобразователь 10, электродвигатель 11 с исполнительным механизмом 12 и датчик 13 положения.
Выход блока 1 задания соединен с первым входом сумматора 2 и входом блока 4 дифференцирования, выход которого соединен с вторым входом первого сумматора 2 и входом пропорционального звена 6. Выход сумматора 2 соединен с первым (прямым) входом интегрального регулятора 7, выход которого соединен с первым входом сумматора 3. Выход пропорционального звена 6 соединен с вторым входом сумматора 3. Выход пропорционально-дифференциального регулятора 9 соединен с входом силового преобразователя 10, выход которого соединен с электродвигателем 11. Электродвигатель 11 кинематически связан с исполнительным механизмом 12, оснащенным датчиком положения 13. Выход сумматора 3 соединен с первым (прямым) входом пропорционального регулятора 8, выход которого соединен с первым (прямым) входом пропорционально-дифференциального регулятора 9. Выход датчика 13 положения соединен с вторыми (инверсными) входами интегрального регулятора 7 и пропорционального регулятора 8 и входом блока дифференцирования 5, выход которого соединен с вторым (инверсным) входом пропорционально-дифференциального регулятора 9.
Блок 1 задания параметров может быть выполнен, например, на микросхемах К555ТМ8, разрядные входы которых подключаются с помощью переключателей к логическим нулям или единицам. Сумматоры 2 и 3 могут быть реализованы, например, на микросхемах К555ИМ6. Блоки 4 и 5 дифференцирования, пропорциональное звено 6, интегральный регулятор 7, пропорциональный регулятор 8 и пропорционально-дифференциальный регулятор 9 могут быть выполнены, например, по а.с. СССР №1649501, опубл. 15.05.91, Бюл. №18 и реализованы, например, на микросхемах серии К555. Силовой преобразователь 10 для электродвигателя постоянного тока, например, реализован в виде цифрового широтно-импульсного модулятора по а.с. СССР №1748241, опубл. 15.07.92, Бюл. №26, с силовым транзисторным мостом на выходе. Для синхронной машины, работающей в режиме вентильного двигателя силовой преобразователь 4 может быть выполнен, например, в виде цифрового модулятора по а.с. СССР №1798907, опубл. 28.02.93, Бюл. №8, с силовым трехфазным транзисторным мостом на выходе. В качестве электродвигателя 11 может быть использован, например, любой электродвигатель постоянного тока или синхронная машина с датчиком положения ротора, например, 4СХ2П100L8. Исполнительный механизм 12, например, может представлять собой стол координатно-расточного станка, соединенный с помощью ходового винта и муфты с валом электродвигателя 11. В качестве датчика 13 положения, например, может быть использована фотооптическая линейка BE 162 с соответствующим устройством оцифровки ее выходного сигнала. Электропривод может быть также замкнут и по датчику угла поворота вала двигателя, например, BE 178.
Следует также отметить, что блок 1 задания, сумматоры 2 и 3, блоки 4 и 5 дифференцирования, пропорциональное звено 6, интегральный регулятор 7, пропорциональный регулятор 8 и пропорционально-дифференциальный регулятор 9 могут быть реализованы также программно на микропроцессорном контроллере.
Следящий электропривод работает следующим образом. В соответствии с величиной задающего сигнала, поступающего с выхода блока 1 задания, и сигнала датчика 13 положения сумматоры 2 и 3, блоки 4 и 5 дифференцирования, пропорциональное звено 6, интегральный регулятор 7, пропорциональный регулятор 8 и пропорционально-дифференциальный регулятор 9 формируют сигнал на входе силового преобразователя 10. Силовой преобразователь 10 преобразует этот сигнал в напряжение на якоре электродвигателя 11 постоянного тока (статоре синхронной машины). При этом вал электродвигателя 11 начинает вращаться и приводит в движение исполнительный механизм 12, перемещение которого измеряется датчиком 13 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 13 положения не сравняется с величиной задающего сигнала, поступающего с выхода блока 1 задания. Интегральный регулятор 7 компенсирует действие всех помех, охваченных датчиком 13. Блок 5 дифференцирования, пропорциональный регулятор 8, и пропорционально-дифференциальный регулятор 3 обеспечивают компенсацию основных инерционностей электродвигателя 11 и исполнительного механизма 12. Сумматоры 2 и 3, блок 4 дифференцирования и пропорциональное звено 6 форсируют сигналы на входе интегрального регулятора 7 и пропорционального регулятора 8, расширяя полосу пропускания частот следящего электропривода.
Для подтверждения высокого быстродействия предлагаемого следящего электропривода рассмотрим его структурную схему (фиг.2). Она содержит три контура: внутренний контур скорости и два контура положения. Для организации обратной связи по скорости сигнал безинерционного датчика положения с коэффициентом передачи k∂n дифференцируется звеном с передаточной функцией
Wocc(p)=koccp
где kocc - коэффициент передачи по скорости (постоянная времени дифференцирования).
Приведенная структурная схема соответствует случаю, когда в качестве электродвигателя используется синхронная машина, работающая в режиме бесколлекторного двигателя постоянного тока, а следящий электропривод замкнут по датчику угла поворота вала двигателя. В этом случае объект управления (двигатель с исполнительным механизмом) описывается передаточной функцией:
где koy - коэффициент передачи объекта; Тк - постоянная времени колебательного звена; ξк - его коэффициент демпфирования.
Силовой преобразователь представлен апериодическим звеном с передаточной функцией
где kcn и Tcn - коэффициент передачи и постоянная времени силового преобразователя соответственно.
Пропорционально-дифференциальный регулятор первого (внутреннего) контура описан передаточной функцией:
Wn∂(p)=kn∂(Tn∂p+1),
где kn∂ - коэффициент передачи, а Tn∂ - постоянная времени регулятора. Пропорциональный регулятор второго контура имеет коэффициент передачи kn. Интегральный регулятор третьего (внешнего) контура представлен передаточной функцией
где Tu - постоянная времени интегрирования.
Дополнительно введенный в электропривод блок дифференцирования изображен на структурной схеме в виде передаточной функции:
Wку1(p)=Tкуp,
а пропорциональное звено представлено коэффициентом передачи kкy.
Промоделируем рассматриваемый следящий электропривод в среде «MATLAB SIMULINK» для конкретной технической реализации, когда он оснащен синхронным исполнительным двигателем 5FK70605AF71. В этом случае объект управления характеризуется постоянной времени Тк=9,859·10-3 с и коэффициентом демпфирования ξк=0,4829.
Рассматриваемый синхронный электродвигатель оснащен датчиком положения ротора, выдающим 2048 дискрет на оборот. Полагая, что задание положения в следящем электроприводе производится в дискретах датчика, логично принять коэффициент передачи датчика положения равным k∂n=1, а его разрешающую способность учесть в общем коэффициенте передачи объекта управления. Поэтому в расчетах принят kоу=1,5396·103 дискрет/Вс, и передаточная функция объекта управления принимает следующие численные значения:
Рассмотрим случай, когда для управления синхронной машиной, работающей в режиме бесколлекторного двигателя постоянного тока, используется 15 - разрядный цифровой широтно-импульсный преобразователь. Тогда коэффициент передачи силового преобразователя

За постоянную времени силового преобразователя принята половина периода смены информации на его входе:
Tcn=0,0016 с.
В расчетах взяты следующие параметры настройки регуляторов: kn∂=8; Tn∂=0,1175 с; kn=8; Tu=0,01 с; kocc=0,0256 с; Tкy=0,0101 с; kкy=0,3273.
Расчетная модель, приведенная на фиг.3, учитывает все эти параметры и позволяет построить частотные характеристики предлагаемого следящего электропривода (фиг.4). Анализ построенных графиков показывает, что если судить по фазовому сдвигу -90° (а именно так определялась частота в устройстве, взятом за прототип), полоса частот пропускания следящего электропривода составляет 1320 рад/с или 210 Гц. Полученные результаты позволяют сказать, что рассматриваемый следящий электропривод практически в 5 раз превосходит по полосе пропускания частот устройство, взятое за прототип.
Таким образом, предлагаемый следящий электропривод позволяет увеличить полосу пропускания частот при отработке гармонического сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2605948C2 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2226739C2 |
| ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2110882C1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с исполнительными двигателями постоянного тока или с синхронными машинами, работающими в режимах вентильного двигателя или бесколлекторного двигателя постоянного тока. Следящий электропривод (фиг.1) содержит блок (1) задания, сумматоры (2) и (3), блоки (4) и (5) дифференцирования, пропорциональное звено (6), интегральный регулятор (7), пропорциональный регулятор (8), пропорционально-дифференциальный регулятор (9), силовой преобразователь (10), электродвигатель (11) с исполнительным механизмом (12) и датчик (13) положения. Предлагаемый следящий электропривод позволяет получить технический результат - увеличить полосу пропускания частот при отработке гармонического сигнала. 4 ил.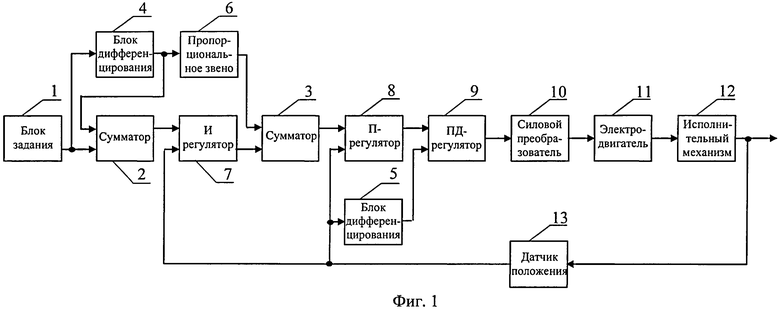
Следящий электропривод, содержащий блок задания, первый и второй сумматоры, первый блок дифференцирования, пропорциональное звено, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель с исполнительным механизмом и датчик положения, причем выход блока задания соединен с первым входом первого сумматора и входом первого блока дифференцирования, выход которого соединен с вторым входом первого сумматора и входом пропорционального звена, выход первого сумматора соединен с первым входом интегрального регулятора, выход которого соединен с первым входом второго сумматора, выход пропорционального звена соединен с вторым входом второго сумматора, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, выход которого соединен с электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторым входом интегрального регулятора, отличающийся тем, что он дополнительно снабжен пропорциональным регулятором и вторым блоком дифференцирования, причем выход второго сумматора соединен с первым входом пропорционального регулятора, выход которого соединен с первым входом пропорционально-дифференциального регулятора, выход датчика положения соединен с вторым входом пропорционального регулятора и входом второго блока дифференцирования, выход которого соединен с вторым входом пропорционально-дифференциального регулятора.
| РЕГУЛЯТОР УГЛА ПОДАЧИ ИМПУЛЬСОВ ТОКА В ФАЗНЫЕ ОБМОТКИ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2088040C1 |
| US 4933620 A1, 12.06.1990 | |||
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |

