Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с асинхронными исполнительными двигателями.
Наиболее близким по технической сущности является регулируемый электропривод переменного тока (см. патент РФ №2226739, опубл. в БИ №10, 2004), содержащий блок задания параметров, интегральный регулятор, пропорциональный регулятор, блок дифференцирования, блок умножения, первый и второй сумматоры, автономный инвертор напряжения, асинхронный электродвигатель, блок выделения модуля, блок деления, коммутатор, блок сравнения и датчик скорости.
Недостаток наиболее близкого по технической сущности электропривода с асинхронным электродвигателем заключается в том, что он не может работать в режимах позиционирования и слежения за заданной координатой перемещения исполнительного механизма.
Сущность изобретения состоит в том, что следящий электропривод с асинхронным электродвигателем, содержащий блок задания параметров, интегральный регулятор, пропорциональный регулятор, блок дифференцирования, блок умножения, первый и второй сумматор, автономный инвертор напряжения, асинхронный электродвигатель с исполнительным механизмом, датчик положения, блок выделения модуля, блок деления, коммутатор и блок сравнения, причем первый выход блока задания параметров соединен с первым входом интегрального регулятора, выход которого соединен с первым входом пропорционального регулятора, выход пропорционального регулятора соединен с входом блока дифференцирования и первым входом первого сумматора, выход которого соединен с входом автономного инвертора напряжения, выход блока дифференцирования соединен с первым входом блока умножения, выход которого соединен с вторым входом первого сумматора, выход блока выделения модуля соединен с первыми входами блока сравнения и второго сумматора, выход которого соединен с первым входом блока деления, второй выход блока задания параметров соединен с вторым входом второго сумматора, третий выход блока задания параметров соединен с вторым входом блока деления, выход которого соединен с первым входом коммутатора, четвертый выход блока задания параметров соединен с вторым входом коммутатора, выход которого соединен с вторым входом блока умножения, пятый выход блока задания параметров соединен с вторым входом блока сравнения, выход которого соединен с третьим входом коммутатора, выход автономного инвертора напряжения соединен с асинхронным электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторыми входами интегрального и пропорционального регуляторов, дополнительно снабжен вторым блоком дифференцирования, причем выход датчика положения соединен с входом блока дифференцирования, выход которого соединен с входом блока выделения модуля.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет обеспечить работу электропривода с асинхронным исполнительным двигателем в режимах позиционирования и слежения за заданной координатой перемещения исполнительного механизма.
На чертеже приведена функциональная схема следящего электропривода с асинхронным электродвигателем.
Следящий электропривод с асинхронным электродвигателем (чертеж) содержит блок 1 задания параметров, интегральный регулятор 2, пропорциональный регулятор 3, блоки 4 и 5 дифференцирования, блок 6 умножения, сумматоры 7 и 8, автономный инвертор 9 напряжения, асинхронный электродвигатель 10 с исполнительным механизмом 11, блок 12 выделения модуля, блок 13 деления, коммутатор 14, блок 15 сравнения и датчик 16 положения.
Первый выход блока 1 задания параметров соединен с первым входом интегрального регулятора 2, выход которого соединен с первым входом пропорционального регулятора 3. Выход пропорционального регулятора соединен с входом блока 4 дифференцирования и первым входом сумматора 7, выход которого соединен с входом автономного инвертора 9 напряжения. Выход блока 4 дифференцирования соединен с первым входом блока 6 умножения, выход которого соединен с вторым входом сумматора 7. Выход блока 12 выделения модуля соединен с первыми входами блока 15 сравнения и сумматора 8, выход которого соединен с первым входом блока 13 деления. Второй выход блока 1 задания параметров соединен с вторым входом сумматора 8. Третий выход блока 1 задания параметров соединен с вторым входом блока 13 деления, выход которого соединен с первым входом коммутатора 14. Четвертый выход блока 1 задания параметров соединен с вторым входом коммутатора 14, выход которого соединен с вторым входом блока 6 умножения. Пятый выход блока 1 задания параметров соединен с вторым входом блока 15 сравнения, выход которого соединен с третьим входом коммутатора 14. Выход автономного инвертора напряжения соединен с асинхронным электродвигателем 10, кинематически связанным с исполнительным механизмом 11, оснащенным датчиком 16 положения. Выход датчика 16 положения соединен с вторыми входами интегрального 2 и пропорционального 3 регуляторов и входом блока 5 дифференцирования, выход которого соединен с входом блока 12 выделения модуля.
Блок 1 задания параметров может быть выполнен, например, на микросхемах К555ТМ8, разрядные входы которых подключаются с помощью переключателей к логическим нулям или единицам. Интегральный 2 и пропорциональный 3 регуляторы и блоки 4 и 5 дифференцирования могут быть реализованы, например, по а.с. СССР №1649501, опубл. 15.05.91, БИ №18 и выполнены, например, на микросхемах серии К555. Блок 6 умножения и блок 13 деления, например, реализованы на микропроцессоре К1801ВМ2, имеющем встроенные функции умножения и деления. Сумматоры 7 и 8, например, выполнены на микросхемах К555ИМ6. Автономный инвертор 9 напряжения, например, реализован в виде цифрового модулятора по патенту РФ №2111608, опубл. 20.05.98, БИ №14, с силовым трехфазным транзисторным мостом на выходе. В качестве асинхронного электродвигателя 9 может быть использован любой выпускаемый промышленностью электродвигатель с короткозамкнутым ротором. Исполнительный механизм 11, например, может представлять собой стол координатно-расточного станка, соединенный с помощью ходового винта и муфты с валом асинхронного электродвигателя. Блок 12 выделения модуля может быть реализован в виде композиции коммутатора, управляемого знаком входного сигнала, на один информационный вход которого входной сигнал подается непосредственно, а на другой - через инверторы. Коммутатор 14, например, может быть реализован на микросхемах К555КП13. Блок 15 сравнения, например, выполнен на сумматорах К555ИМ6. В качестве датчика 16 положения, например, может быть использована фотооптическая линейка BE 162 с соответствующим устройством оцифровки ее выходного сигнала.
Следует также отметить, что блок 1 задания параметров, интегральный регулятор 2, пропорциональный регулятор 3, блоки 4 и 5 дифференцирования, блок 6 умножения, сумматоры 7 и 8, блок 12 выделения модуля, блок 13 деления, коммутатор 14 и блок 15 сравнения могут быть также выполнены программно на микропроцессорном контроллере.
Следящий электропривод с асинхронным электродвигателем работает следующим образом. В соответствии с величиной задающего сигнала, поступающего с первого выхода блока 1 задания параметров, и сигнала датчика 16 положения интегральный регулятор 2 в совокупности с пропорциональным регулятором 3, блоками 4 и 5 дифференцирования, блоком 6 умножения, сумматорами 7 и 8, блоком 12 выделения модуля, блоком 13 деления, коммутатором 14 и блоком 15 сравнения формируют сигнал на входе автономного инвертора 9 напряжения. Автономный инвертор 8 напряжения преобразует этот сигнал в частоту и амплитуду напряжения на статоре асинхронного электродвигателя 10. При этом вал асинхронного электродвигателя начинает вращаться и приводит в движение исполнительный механизм 11, перемещение которого измеряется датчиком 16 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 16 положения не сравняется с величиной задающего сигнала, поступающего с первого выхода блока 1 задания параметров. Интегральный регулятор 2 компенсирует действие всех помех, охваченных датчиком 16. Пропорциональный регулятор 3, блоки 4 и 5 дифференцирования, блок 6 умножения, сумматоры 7 и 8, блок 12 выделения модуля, блок 13 деления, коммутатор 14 и блок 15 сравнения представляют собой регулятор внутреннего контура и обеспечивают компенсацию основных инерционностей асинхронного электродвигателя 10.
В общем случае динамические свойства асинхронного электродвигателя описываются системой нелинейных дифференциальных уравнений (см. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. - М.: Машиностроение, 1990. С.194). Но в первом приближении при линеаризации этих уравнений можно получить передаточную функцию асинхронного электродвигателя по отношению, например, к управляющему воздействию - скорости вращения магнитного поля ω0 (см. Стариков А.В. Линеаризованная математическая модель асинхронного электродвигателя как объекта системы частотного управления // Вестник Самарского государственного технического университета. Серия Физико-математические науки. Выпуск 16, 2002. С.175-180)

где приняты следующие обозначения: ω(р) - изображение скорости вращения вала асинхронного электродвигателя;
 - коэффициент передачи двигателя по управляющему воздействию;
- коэффициент передачи двигателя по управляющему воздействию;
 ,
,  - электромагнитные постоянные времени цепей статора и ротора; L1 и R1 - индуктивность и активное сопротивление цепи статора;
- электромагнитные постоянные времени цепей статора и ротора; L1 и R1 - индуктивность и активное сопротивление цепи статора;  и
и  - приведенные индуктивность и активное сопротивление цепи ротора;
- приведенные индуктивность и активное сопротивление цепи ротора;  ; L0 - взаимная индуктивность; ψ1X0, ψ1Y0, ψ2X0 и ψ2Y0 - значения в определенной рабочей точке проекций векторов потокосцеплений статора и ротора в ортогональной системе координат x-y, вращающейся со скоростью магнитного поля;
; L0 - взаимная индуктивность; ψ1X0, ψ1Y0, ψ2X0 и ψ2Y0 - значения в определенной рабочей точке проекций векторов потокосцеплений статора и ротора в ортогональной системе координат x-y, вращающейся со скоростью магнитного поля;
 - условное обозначение постоянной времени второго порядка, зависящей от J - приведенного момента инерции ротора; m - числа фаз электродвигателя; ZП - числа пар полюсов и значений проекций потокосцеплений в выбранной рабочей точке.
- условное обозначение постоянной времени второго порядка, зависящей от J - приведенного момента инерции ротора; m - числа фаз электродвигателя; ZП - числа пар полюсов и значений проекций потокосцеплений в выбранной рабочей точке.
С изменением частоты вращения магнитного поля ω0 и скорости вращения ω вала асинхронного электродвигателя параметры рабочей точки, а именно проекции векторов потокосцеплений и, следовательно, параметры передаточной функции (1) будут меняться. Тем не менее расчеты показывают, что при любых скоростях ω передаточную функцию (1) можно представить в виде

где ТФ - постоянная времени форсирующей составляющей; ТА - постоянная времени апериодической составляющей; ТК - постоянная времени колебательной составляющей; ξ - коэффициент демпфирования.
Выбирая постоянную времени регулятора внутреннего контура по следующему закону
можно достичь устойчивой работы следящего электропривода с асинхронным электродвигателем.
Расчеты показывают, что постоянная времени ТПД регулятора по выражению (3) должна меняться в зависимости от скорости вращения вала асинхронного электродвигателя. Причем при изменении скорости асинхронного электродвигателя вниз от номинальной до некоторой скорости ωn сумма  практически не меняется. При скоростях ниже ωn изменение суммы
практически не меняется. При скоростях ниже ωn изменение суммы  происходит по закону, близкому к обратно пропорциональному.
происходит по закону, близкому к обратно пропорциональному.
Перестройку регулятора осуществляют блок 5 дифференцирования, блок 6 умножения, сумматор 8, блок 12 выделения модуля, блок 13 деления, коммутатор 14 и блок 15 сравнения. Перестройка производится в пределах от нулевой скорости до значения скорости ωn, задаваемого с пятого выхода блока 1 задания параметров. При скоростях вращения больше ωn на вход блока 6 умножения с четвертого выхода блока 1 задания параметров через коммутатор 14 подается некоторое базовое заранее заданное значение постоянной времени ТПД0 регулятора внутреннего контура. Определение ситуаций, когда скорость асинхронного электродвигателя превышает по абсолютной величине значение ωn, и управление коммутатором 14 осуществляет блок 15 сравнения, на входы которого поступают сигналы с блока 12 выделения модуля и с пятого выхода блока 1 задания параметров. При скоростях ниже ωn на вход блока 6 умножения подается значение постоянной времени
регулятора внутреннего контура. Здесь величина приращения Δω скорости задается с второго выхода, а произведение ТПД0ω0 - с третьего выхода блока 1 задания параметров. С помощью блока 5 дифференцирования, блока 12 выделения модуля, сумматора 8 и блока 13 деления производится вычисление текущего значения постоянной времени ТПД регулятора внутреннего контура. Величина Δω вводится в рассмотрение с целью ограничения на определенном уровне максимального значения постоянной времени ТПД. В результате динамику следящего электропривода с асинхронным электродвигателем во всех режимах работы можно приближенно описать передаточной функцией с переменными параметрами
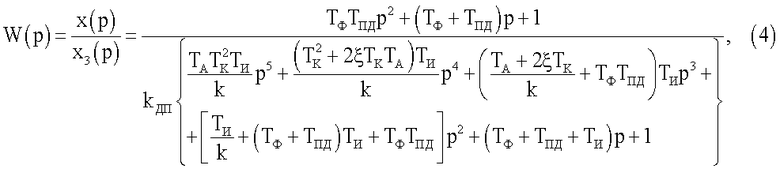
где x(p) - изображение выходной координаты следящего электропривода; xЗ(p) - изображение задающего сигнала; kДП - коэффициент передачи датчика положения; ТИ - постоянная времени интегрального регулятора; k=kПДkСПkДУkИМkДП - коэффициент передачи внутреннего контура следящего электропривода; kПД - коэффициент передачи пропорционального регулятора; kСП - коэффициент передачи силового преобразователя (автономного инвертора напряжения); kИМ - коэффициент передачи исполнительного механизма.
Подбор соответствующих значений постоянной времени ТИ интегрального регулятора и коэффициента kПД передачи пропорционального регулятора позволяет настроить следящий электропривод с асинхронным электродвигателем на работу с высокой точностью и быстродействием.
Таким образом, предлагаемый электропривод с асинхронным электродвигателем позволяет обеспечить режимы позиционирования и слежения за заданной координатой перемещения исполнительного механизма с высоким быстродействием и точностью, определяемой дискретностью и точностью датчика положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2226739C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2605948C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2010 |
|
RU2442024C2 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с асинхронными исполнительными двигателями. Технический результат заключается в обеспечении режимов позиционирования и слежения за заданной координатой перемещения исполнительного механизма с высоким быстродействием и точностью, определяемой дискретностью и точностью датчика положения. Следящий электропривод с асинхронным электродвигателем содержит блок задания параметров, интегральный регулятор, пропорциональный регулятор, два блока дифференцирования, блок умножения, два сумматора, автономный инвертор напряжения, асинхронный электродвигатель с исполнительным механизмом, блок выделения модуля, блок деления, коммутатор, блок сравнения и датчик положения. 1 ил.
Следящий электропривод с асинхронным электродвигателем, содержащий блок задания параметров, интегральный регулятор, пропорциональный регулятор, блок дифференцирования, блок умножения, первый и второй сумматоры, автономный инвертор напряжения, асинхронный электродвигатель с исполнительным механизмом, датчик положения, блок выделения модуля, блок деления, коммутатор и блок сравнения, причем первый выход блока задания параметров соединен с первым входом интегрального регулятора, выход которого соединен с первым входом пропорционального регулятора, выход пропорционального регулятора соединен с входом блока дифференцирования и первым входом первого сумматора, выход которого соединен с входом автономного инвертора напряжения, выход блока дифференцирования соединен с первым входом блока умножения, выход которого соединен с вторым входом первого сумматора, выход блока выделения модуля соединен с первыми входами блока сравнения и второго сумматора, выход которого соединен с первым входом блока деления, второй выход блока задания параметров соединен с вторым входом второго сумматора, третий выход блока задания параметров соединен с вторым входом блока деления, выход которого соединен с первым входом коммутатора, четвертый выход блока задания параметров соединен с вторым входом коммутатора, выход которого соединен с вторым входом блока умножения, пятый выход блока задания параметров соединен с вторым входом блока сравнения, выход которого соединен с третьим входом коммутатора, выход автономного инвертора напряжения соединен с асинхронным электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторыми входами интегрального и пропорционального регуляторов, отличающийся тем, что он дополнительно снабжен вторым блоком дифференцирования, причем выход датчика положения соединен с входом блока дифференцирования, выход которого соединен с входом блока выделения модуля.
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2226739C2 |
| ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2110882C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод переменного тока | 1980 |
|
SU1007169A1 |
| US 4437051 A, 13.03.1984. | |||

