Изобретение относится к машиностроению и может быть использовано в приводах различных машин, преимущественно в транспортных средствах.
Существует множество различных конструкций дифференциалов.
Наиболее распространенным является автомобильный дифференциал, выполненный с коническим зацеплением центральных зубчатых колес с сателлитами. Однако их изготовление сложно и требует специализированного оборудования. Диаметр дифференциалов, из-за необходимости располагать оси сателлитов перпендикулярно к осям центральных колес, достаточно велик, что является основной причиной применения у транспортных ведущих колес большого диаметра.
Известны более простые в изготовлении дифференциалы со сдвоенными цилиндрическими сателлитами, которые выполняют такую же механическую работу распределения крутящего момента с водила на два колеса.
Например, зубчатый механизм дифференциала с цилиндрическими колесами внешнего зацепления, изображенный в справочном пособии И.И. Артоболевского "Механизмы в современной технике". т. IV "Наука", 1980, с. 516 по а.с. N 579480.
Дифференциальная передача, содержащая два планетарных ряда с общим водилом и сателлитами одинакового диаметра, равномерно расположенными в каждом ряду по окружности водила и через один находящихся в зацеплении с солнечными шестернями (центральными колесами) и эпициклами, в которой каждый из сателлитов одного ряда взаимодействует с двух сторон с соседними сателлитами другого ряда.
Техническое решение по а. с. N 579480 наиболее близко предлагаемому техническому решению. Этот механизм принимаем за прототип.
Недостатком этого механизма является то, что каждый сателлит имеет четыре полюса зацепления. В т.ч. зацепление с эпициклами - внутреннее.
Такое обилие полюсов зацеплений определяет сложность исполнения фиксированного положения для оси каждого сателлита, т.к. для каждого из них должно быть определено и в любой момент строго выдержано четыре межосевых расстояния.
В соотношении числа зубьев центрального колеса с числом зубьев у сателлита существует зависимость, связанная с числом самих сателлитов: ,
,
где
Zц - число зубьев у центрального колеса или эпицикла;
Zс - число зубьев у сателлита;
n - число сателлитов в каждом ряду;
α - коэффициент коррекции.
Здесь знак плюс для зацеплений с эпициклами, а знак минус для зацеплений с центральным колесом.
Из этой зависимости следует, что только при n=3 равенство может быть выражено целым числом с коэффициентом коррекции α . Т.е. только при трех сателлитах в каждом ряду также зацепления могут быть осуществлены без модификации профиля зубьев в зацеплениях, но с обязательным учетом возможности взаимных зацеплений между собой без интерференции зубьев при их малом количестве на шестерне.
Как отмечено в описании к а.с. N 579480, число зубьев у центрального колеса, соответственно и у эпицикла, должно быть кратно числу сателлитов в ряду. Но кроме того, вследствие кратности числа зубьев эпициклов и центральных колес числу самих сателлитов, разность также будет кратна числу сателлитов. А отсюда - число зубьев на сателлитах тоже должно быть кратно числу сателлитов.
Для эвольвентных зацеплений существуют ограничения по минимальному количеству зубьев у шестерни взаимодействующих пар. Например, в соответствие с учебником ТММ И.И. Артоболевского, с. 454, табл. 6, следует, что с зубьями нормального профиля и числом менее 18 из-за интерференции зуба вообще невозможно внутреннее зацепление.
Приведенные зависимости ограничивают возможность конструктивного выбора числа сателлитов и синтеза их зубчатых зацеплений в требуемых габаритных размерах.
Предлагаемое техническое решение позволяет значительно уменьшить степень влияния этих ограничений на конструктивный выбор количества сателлитов в планетарном ряду. Этим решением для каждого сателлита выполнено только три полюса зацеплений. Два с сопряженными с ним двумя сателлитами другого ряда и один с центральным колесом внешнего или внутреннего зацепления. Это дает возможность конструктивно увеличивать число сателлитов, уменьшать их модуль, а соответственно и диаметр, не связывая число зубьев с числом самих сателлитов в ряду.
Этим обеспечивается конструктивная возможность осуществлять зацепление сателлитов между собой, расположенных в разных рядах без коррекции межосевого расстояния. Межосевое расстояние между осями сателлитов и осью центрального колеса, равное радиусу окружности, на которой размещены оси сателлитов, при нормальном профиле зубьев и замкнутой цепи зацеплений сателлитов вокруг центрального колеса, не может быть выражено целым числом, кроме случая при n=3, и определяется по формуле
К тому, же, число зубьев у центрального колеса должно быть кратно числу сателлитов в ряду, а межосевое расстояние представлять собой сумму
Вследствие этого диаметр центрального колеса необходимо корригировать, профиль его зубья модифицировать. Этим обеспечивается возможность применения увеличенного числа сателлитов малого диаметра с минимально возможным числом зубьев и не обязательно кратным числу самих сателлитов, как у прототипа.
Это не исключает возможность корригировать зацепления за счет межосевых расстоянии между сателлитами путем изменения диаметра сателлитов и модификации профиля его зубьев. А также коррекцию диаметра сателлитов и диаметра центральных колес одновременно.
Увеличенное количество сателлитов равномернее распределяет силовой поток от водила по зубьям центральных колес, снижая контактные напряжения, обеспечивая возможность уменьшать модуль зацепления и тем уменьшать диаметр сателлитов и общий диаметр механизма.
При передаче силового потока на зубья центральных колес нагрузка по сателлитам самораспределяется, т.к. рабочие зазоры на осях сателлитов всегда больше погрешностей шага маломодульных зацеплений, а каждая пара зацепленных между собой сателлитов представляет собой самокомпенсирующуюся систему при взаимодействии с третьим звеном.
Вышеперечисленные преимущества предлагаемого технического решения конструктивно легко реализуются.
Это достигается тем, что множество сателлитов обоих рядов свободно посажены на параллельные оси, которые закреплены по окружности на одном водиле для обоих рядов. Водило представляет собой две торцовые стенки, соединенные между собой стержнями и скрепленные ими в жесткую пространственную конструкцию. Каждый стержень, находящийся внутри между стенками, имеет проточку по диаметру отверстия в сателлите. Сателлит на проточке стержня может свободно вращаться и удерживает его от этого только зацепление с другими сателлитами и центральным колесом. Проточки на стержнях выполнены таким образом, что каждый сателлит, зацепленный с двумя смежными с ним сателлитами другого ряда, сдвинут вдоль оси относительно их, а в зацеплении остается только один конец сателлита. Сателлиты на стержнях удерживаются от осевого смещения торцовыми стенками, закрепленными стержнями же. Множественность стержней, крепящих торцовые стенки, обеспечивает конструкции необходимую жесткость, образуя пространственную решетку из стержней и торцовых стенок, передающую силовой поток от водила на сателлиты.
Соотношение числа зубьев у зубчатых колес и сателлитов, как и у прототипа, связаны между собой зависимостью:
Но, как указано выше, в отличие от прототипа, здесь не обязательна кратность числа зубьев сателлита числу самих сателлитов в ряду.
Привод водилу может быть осуществлен любым известным в механике способом. Например, клиноременной или цепной передачей, червячным или зубчатым зацеплением, электромагнитным или другим способом.
Конструктивно водило и его торцовые стенки могут быть снабжены дополнительными устройствами. Например, дополнить торцовые стенки распорной обечайкой, образуя вокруг сателлитов вращающийся вместе с водилом защитный кожух. Или снабдить торцовые стенки ступицами для опорных подшипников. Выполнить на распорной обечайке зубчатый венец, звездочку для цепной передачи, или выполнить эти элементы на торцевых стенках и т.д. и т.п.
Исключительная простота формы сателлита, свобода выбора для него количества зубьев, легкость его встраивания и механизм обеспечивает возможность унификации его типоразмеров для применения каждого из них в дифференциалах разного назначения, на разные нагрузки, с разным числом сателлитов в конструкции. Подобное абсолютно невозможно для ныне используемых в автомобилестроении дифференциалов с коническими сателлитами. Соответственно и оси в предлагаемом механизме также просто унифицируются.
Изложенное выше техническое решение изображено на прилагаемых чертежах, где изображены продольные разрезы разных вариантов исполнения дифференциалов с нечетным множеством сателлитов в ряду. Такими же будут продольные разрезы дифференциалов и с четным множеством сателлитов в ряду, если разрез выполнить по плоскостям, проходящим по оси центральных колес и осям сателлитов обоих рядов.
На фиг. 1 изображен пример исполнения дифференциала с четырьмя сателлитами в каждом ряду. Здесь: центральное колесо 1, совмещенное с выходным валом (ведомой осью), стяжной стержень (ось сателлита) 3, торцовые стенки 4, ведущее звено (привод водила) 5, обечайка-кожух 6. Стяжные стержни и сателлиты обоих рядов взаимозаменяемы.
На фиг. 2 изображен пример исполнения дифференциала с восемью такими же сателлитами в ряду. Здесь сателлиты и оси сателлитов (стяжные стержни) такие же, как и у дифференциала на фиг. 1. Центральные колеса выполнены со шлицевыми отверстиями под выходные валы. Все обозначения такие же, как на фиг. 1.
На фиг. 3 изображен пример исполнения дифференциала, аналогичного дифференциалу фиг. 2 с восемью сателлитами в каждом ряду, но с приводным звеном 5, выполненным посередине между торцовыми стенками 4. Здесь: сателлиты 2 такие же, как на фиг. 1, 2 оси сателлитов 3 укорочены и крепят ведущее звено 5 к торцовым стенкам 4 стяжными стержнями (осям сателлитов) 3 каждого ряда поочередно изнутри.
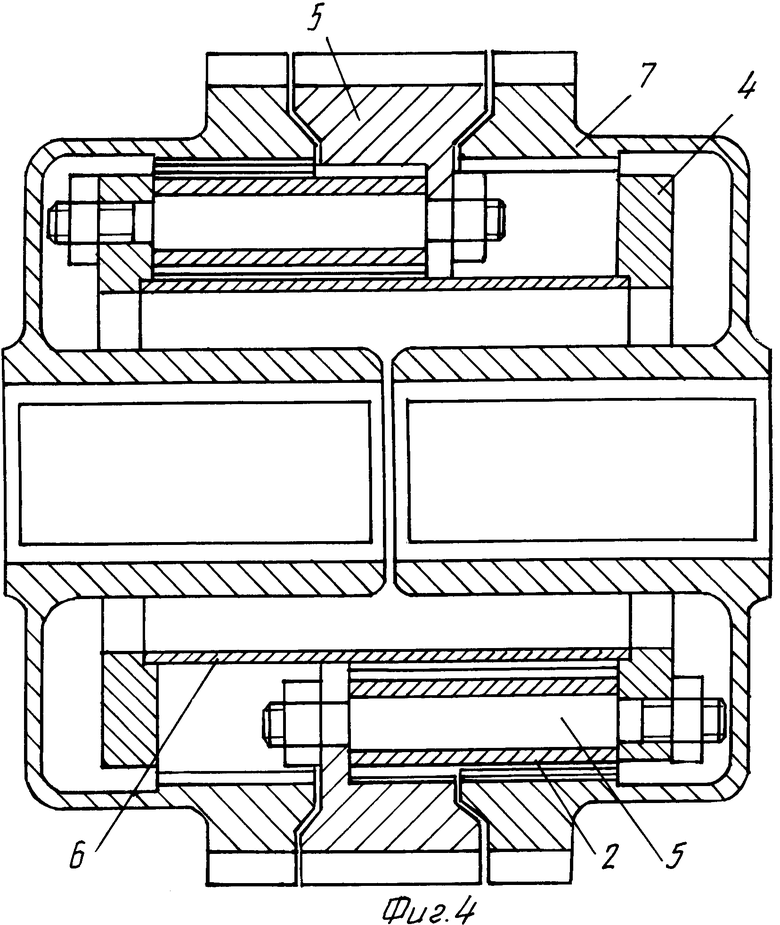
На фиг. 4 изображен пример исполнения дифференциала, аналогичного дифференциалу фиг. 3, но с центральными колесами внутреннего зацепления 7, обечайка-кожух 6 выполнена внутри. Остальные обозначения такие же, как и на предыдущих фигурах.
Этими вариантами не исчерпываются конструктивные возможности предлагаемого технического решения. Но для любого исполнения сохраняется простейшая форма его деталей и простота монтажа при высокой монтажной плотности.
Работает предлагаемый дифференциальный механизм следующим образом.
При равном сопротивлении на обоих центральных колесах, крутящий момент с водила 5, распределяется сателлитами 2 по центральным колесам 1 поровну. Сателлиты при этом на осях остаются неподвижными. Зубья, зацепленные в этот момент с центральными колесами, работают как многошлицевое соединение.
При возрастании сопротивления на одном из центральных колес, до величин превышающих внутреннее сопротивление дифференциала, это колесо замедляет свое вращение. Сателлиты, зацепленные с ним, начинают обкатываться по нему, вращаясь на своих осях. Зацепленные с ними сателлиты другого ряда начинают вращаться в другую сторону, сообщая зацепленному с ними другому центральному колесу дополнительную угловую скорость. При выравнивании сопротивлений на центральных колесах обработка сателлитов прекращается. Прекращается и передача дополнительной скорости вращения другому колесу.
В любой момент времени сохраняется соотношение оборотов
где
nв - число оборотов водила;
nцл и nцп - число оборотов левого и правого колес.
Эффективность предлагаемого технического решения обусловлена тем, что силовой поток с водила на центральные колеса расщепляется на множество параллельных ветвей по сателлитам, снижая уделенную нагрузку на них. Этим создается возможность уменьшать модуль зацепления и за счет этого уменьшать межосевые расстояния в зацеплениях и тем уменьшать габариты механизма, повысить монтажную плотность, снизить металлоемкость и трудоемкость при изготовлении, уменьшить массу механизма относительно к передаваемой мощности.
Исключительная простота форм деталей позволяет легко автоматизировать их изготовление и сборку механизма. Снизить себестоимость его производства без снижения потребительских свойств.
Пространственная решетка из множества стержней с сателлитами в предлагаемом механизме, кроме основной функции, способна исполнять функцию сепаратора и роликов двухрядного роликового подшипника качения, осуществляющего подвижную опору между водилом и зубчатыми поверхностями центральных колес.
Предлагаемый механизм конструктивно просто агрегатируется с другими механизмами транспортных средств. Например, силовыми редукторами, механизмами блокировки дифференциала и т.д.
Конструктивная многовариантность возможного применения технического решения создает предпосылки к его использованию в достаточно широком диапазоне приводов для транспортных средств и в других отраслях хозяйства.
Реализация предлагаемого технического решения обеспечит снижение металлоемкости, увеличение монтажной плотности, уменьшение общих габаритов и массы механизма на единицу передаваемых мощностей при исключительной простоте форм деталей его составляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| РАЗДАТОЧНАЯ КОРОБКА ТРАНСПОРТНОГО СРЕДСТВА С МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2011 |
|
RU2462372C1 |
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2093374C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ДИФФЕРЕНЦИАЛ | 2008 |
|
RU2397390C1 |
| Дифференциальная передача | 1977 |
|
SU624027A1 |
Дифференциальный механизм предназначен для упрощения и уменьшения габаритов конструкции. Общее водило двух планетарных рядов дифференциального механизма выполнено в виде двух торцовых стенок, скрепленных стержнями, каждый из которых является осью для сателлита. Сателлит каждого ряда введен в зацепление с центральным колесом своего ряда и двумя сателлитами другого ряда и установлен на стержне с возможностью вращения. Для сопряжения с внешним приводом механизм может иметь звено, расположенное посередине между торцовыми стенками и скрепленное с ними стержнями. 1 з.п. ф-лы, 4 ил.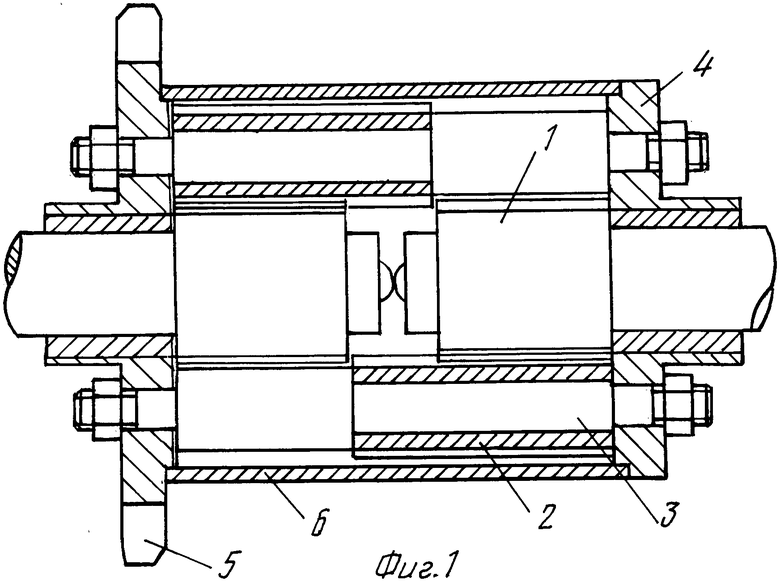
| Автоболевский И.И | |||
| Механизмы в современной технике | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 579480, F 16 H 3/62, 1977. | |||
