Изобретение - привод панкратической системы относится к ракетной технике, медицине, геологии, промышленной технике, используется, например, при дистанционном управлении сложных производственных процессов, работе роботов, в видеотехнике и других отраслях народного хозяйства.
Из аналогов известен привод панкратической системы [1], применяемый для лучевых систем наведения, использующий программное устройство в виде кулачка [2].
Кулачковый механизм содержит цилиндрический кулачок с рабочими поверхностями в виде паза, в который помещен подшипник, установленный на толкателе (оси), жестко соединенном с кареткой с возможностью продольного перемещения относительно неподвижного звена (направляющей).
Перемещение линз панкратического объектива в зависимости от времени, имеет резко нелинейную характеристику, поэтому применение цилиндрического кулачка, выполненного с рабочими поверхностями в виде широкого паза, по которому контактирует подшипник, позволяет конструктивно изготовить программу не более чем на одном обороте цилиндрического кулачка, при этом рабочие поверхности цилиндрического кулачка сначала, как правило, имеют небольшой угол подъема, а к концу программы он достигает значительной величины.
Привод с таким конструктивным решением не сможет отработать резко нелинейную программу.
Описанная выше проблема приводит к множеству всевозможных вариантов разработок привода линз панкратического объектива при создании лучевых систем наведения.
Описанная конструкция привода с цилиндрическим программным кулачком имеет значительный вес, так как паз под подшипник необходимо изготавливать глубоким. При изготовлении сквозного паза программный кулачок теряет прочность, жесткость, что является недостатком конструкции.
Изготовление программных кулачков на каждую лазерную систему наведения методом механической обработки нетехнологично и требует значительной трудоемкости, так как необходима высокая точность изготовления. Поэтому такие программные кулачки сложны в изготовлении и имеют значительный вес.
Расположение программного цилиндрического кулачка не соосно оптической оси лазерной системы наведения приводит к увеличению габаритов и веса привода линз панкратического объектива.
Наиболее близким по технической сути является привод линз панкратического объектива, описанный в [3].
В техническом решении используется двухлинзовый объектив панкратической системы.
Привод панкратической системы включает в себя каретки с осями, установленные в продольных направлениях, при этом в каждой оправе каретки жестко закреплены линзы.
Для отработки программы применен двухпрограммный цилиндрический кулачок, обеспечивающий перемещение каретки с линзами панкратического объектива.
При этом цилиндрический кулачок, выполненный с двумя программами, вращается с одинаковой угловой скоростью, а выполненная в виде наклонных прорезей программа на цилиндрическом кулачок обеспечивает поступательное перемещение оправ с линзами с разной скоростью в соответствии с расчетной программой.
Привод панкратической системы с использованием цилиндрического кулачка с наклонными прорезями приводит к сложности изготовления, понижению точности изготовления программного кулачка, к увеличению габаритов и веса привода панкратической системы.
Цель изобретения - повышение точности программного кулачка, а также уменьшение габаритов, веса и упрощение конструкции привода панкратической системы.
Поставленная цель достигается тем, что привод панкратической системы содержит линзы панкратической системы, жестко закрепленные в оправах кареток с осями, установленными в продольных направляющих; программный кулачок, выполненный в виде полого цилиндра с рабочими поверхностями в виде многовиткового внутреннего выступа и установленный соосно оптической оси, а на каждую ось кареток установлен вкладыш, на котором закреплены две оси, преимущественно под углом 90o, на которые установлены подшипники, контактирующие с рабочими поверхностями программного кулачка.
Описанная конструкция выполненная с рабочими поверхностями кулачка в форме V совместно с применением вкладышей позволяет установить и совместить ось программного кулачка с оптической осью лучевой системы наведения с обеспечением большого числа витков программы, что делает конструкцию малогабаритной, простой и компактной.
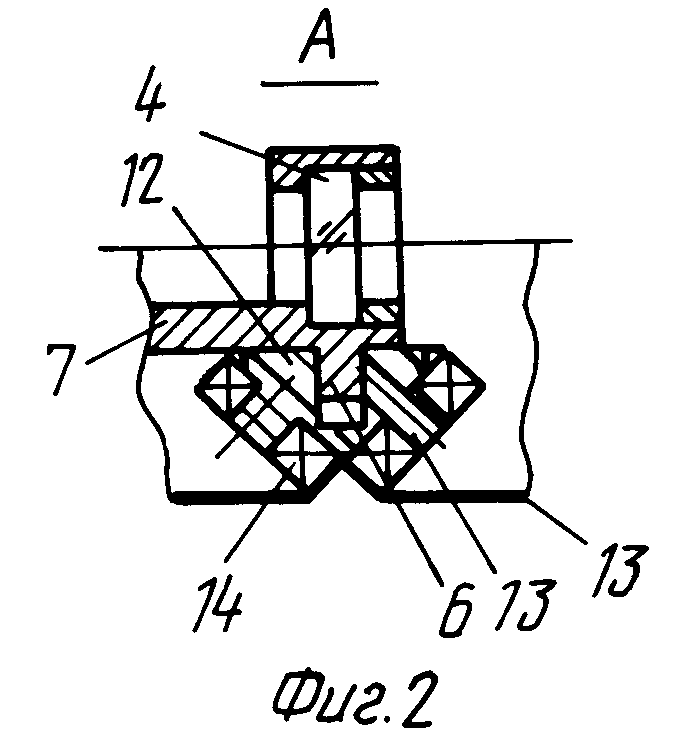
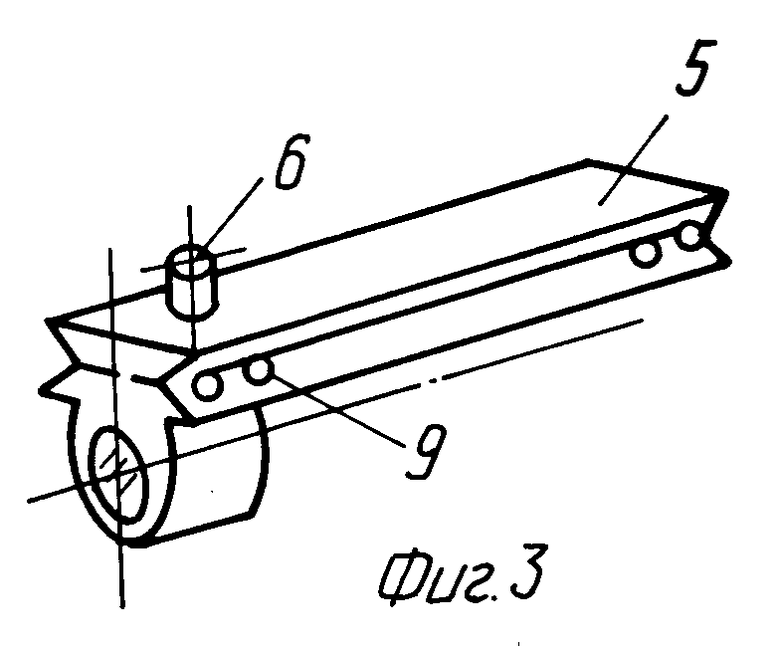
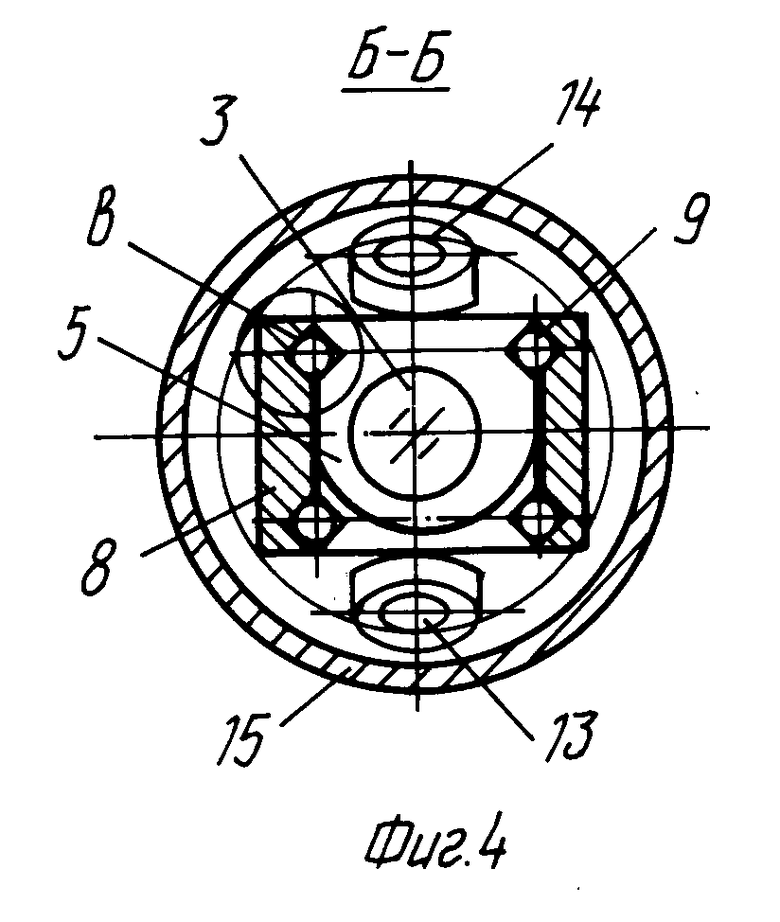
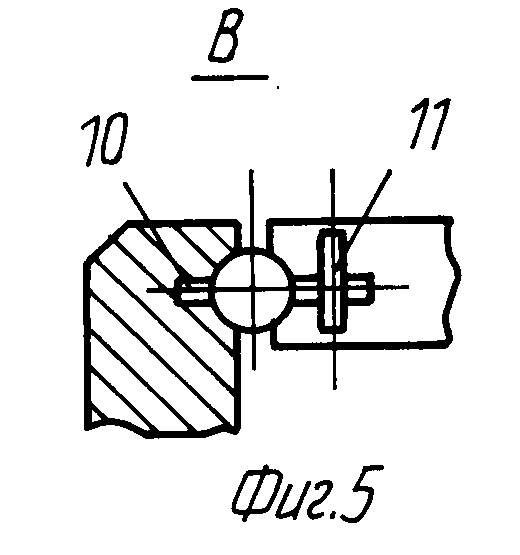
На фиг. 1 изображен привод панкратической системы; на фиг. 2 - привод панкратической системы, узел А на фиг. 1; на фиг. 3 - привод панкратической системы (каретка); на фиг. 4 - привод панкратической системы, разрез Б-Б на фиг. 1; на фиг. 5 - привод панкратической системы, узел В на фиг. 4; на фиг. 6 - привод панкратической системы (второй вариант).
Привод панкратической системы содержит корпус 1, объектив 2, отрицательную (рассеивающую) линзу 3, положительную (собирающую) линзу 4 панкратического объектива, конденсатор и лазер (не показано), каретку 5 с осью 6 (см. фиг. 3) и жестко закрепленной линзой 4, направляющую 8, причем каретки 5, 7 установлены в направляющих 8, через стальные шарики 9 с сепаратором 10 см. фиг. 5), удерживающиеся с помощью штифтов 11, вкладыши 12 с осям 13, на которых установлены подшипники 14, причем вкладыши 12 установлены на осях 6 кареток 5, 7, цилиндрический блочный многовитковый программный кулачок 15 с внутренними рабочими поверхностями, выполненными в форме V, на которые опираются подшипники 14 вкладышей 12, подшипники 16, установленные в программном кулачке 15 относительно корпуса 1, шестерню 17, жестко закрепленную на программном кулачке 15.
Конструкция привода панкратической системы, представленная в графических материалах, проста в изготовлении, имеет малый вес и габариты, рабочие внутренние поверхности программного кулачка в форме V с применением вкладышей 12 позволить многовитковой программный кулачок с большим числом витков (4 витка), тем самым отработать самые нелинейные программы полета ракеты (практическим любую программу), а ось кулачка совместить с оптической осью панкратического объектива, что обеспечивает малогабаритность привода панкратической системы.
Технология изготовления программного кулачка лучевой системы наведения включает механическую обработку в виде дискретных проходов инструментом по программе на заготовке, механическую обработку дискретных участков до плавного перехода программы рабочей поверхности кулачка (цилиндрической, дисковой, многовитковой, блочной), при этом для изготовления цилиндрического программного кулачка кулачок-заготовка изготавливается сборной в виде нескольких секторов (для изготовления дискового программного кулачка кулачок-заготовку изготавливают в виде одной детали), рабочие поверхности кулачка-заготовки совмещают с тонкостенной трубой или листом (цилиндрический или дисковый программный кулачок) будущего программного кулачка с противоположной не рабочей поверхности тонкостенной трубы (листа), создают давление, которое воспринимает рабочая поверхность кулачка (рабочим телом может быть полиуретан, жидкость, газ и т.п.) до плотного прилегания тонкостенной трубы (листа) к поверхности кулачка-заготовки, с последующим его демонтажом и удалением из программного кулачка.
Изготовление программного кулачка, описанного выше, может быть выполнено из очень тонкого материала для более точного получения программы полета ракеты, для этого программному кулачку необходимо придать прочность (жесткость), поэтому на него необходимо на нерабочую поверхность устанавливать и закреплять тонкостенную заготовку 18 с наполнителем 19 (см. фиг. 6), например, используя компаунд ВК-9.
При работе лучевой системы наведения лазерный луч генерируется поочередно двумя полупроводниковыми генераторами (ПКГ), причем одна излучающая полоска ПКГ используется при наведении ракеты по горизонтали, а другая - по вертикали.
Включаются сканирующее устройство с датчиком положения луча, привод панкратического объектива. При этом привод осуществляется через шестерню 17, программное устройство, выполненное в виде цилиндрического, внутреннего многовиткового, блочного кулачка 15.
Рабочие поверхности программного кулачка 15, выполненные в форме V, через вкладыши 12 с осями 13 и подшипниками 14 передают поступательное движение осям 6 с каретками 5, 7, которые перемещаются совместно с жестко закрепленными в них линзами 3, 4 по направляющей 8.
Цикл поочередного сканирования плоского луча по горизонтали и вертикали повторяется непрерывно.
Изображение излучающих полосок ПКГ по горизонтали и вертикали непрерывно формируется в плоскости ракеты с помощью программного перемещения подвижных элементов панкратического объектива.
Принцип действия системы управления основан на использовании время-импульсной модуляции. При использовании лазера с непрерывным излучением, используют модулирующий диск и блок выделения координат (электронный блок), с помощью которых получают частотную модуляцию для управления ракетой.
Рабочие внутренние поверхности кулачка в форме V с применением вкладышей позволяют установить и совместить ось программного кулачка с оптической осью лучевой системы наведения, а также изготовить внутренние выступы (витки) цилиндрического, многовиткового, блочного программного кулачка с большим числом витков и обеспечить минимальный шаг программы, тем самым отработать резко нелинейную программу, поэтому предлагаемый привод панкратической системы найдет широкое применение в народном хозяйстве и заменит множество электромеханических, следящих систем с программным устройством, так как прост в изготовлении, имеет малые габариты, вес и способен отработать практически любую резко нелинейную программу.
Источники информации
1. Лазерный излучатель для системы наведения ракет, патент США N 677636, опублик. 05.09.78.
2. Фадеева Л. А. Теория механизмов и детали приборов. Машиностроение, 1983,- с. 22, рис. 3.1. Схема кулачкового механизма.
3. Чуриловский В. Н. Теория оптических приборов. М.: Машиностроение, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩЕЕ УСТРОЙСТВО ЛУЧЕВОЙ СИСТЕМЫ НАВЕДЕНИЯ | 1995 |
|
RU2107880C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 1996 |
|
RU2108531C1 |
| ПРИВОД ПАНКРАТИЧЕСКОГО ОБЪЕКТИВА | 2003 |
|
RU2260826C1 |
| ПРИВОД ПАНКРАТИЧЕСКОГО ОБЪЕКТИВА | 2003 |
|
RU2260827C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ И СПОСОБ ЮСТИРОВКИ ПАРАЛЛЕЛЬНОСТИ ОПТИЧЕСКИХ ОСЕЙ ИНФОРМАЦИОННОГО И ВИЗИРНОГО КАНАЛОВ | 2003 |
|
RU2249782C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ И СПОСОБ ЮСТИРОВКИ ПАРАЛЛЕЛЬНОСТИ ОПТИЧЕСКИХ ОСЕЙ ИНФОРМАЦИОННОГО И ВИЗИРНОГО КАНАЛОВ | 2003 |
|
RU2255292C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2000 |
|
RU2188380C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ ЮСТИРОВКИ ИЗЛУЧАТЕЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ПРИЦЕЛ-ПРИБОРА НАВЕДЕНИЯ | 1999 |
|
RU2148234C1 |
Использование: для управляемых ракетных комплексов, в медицине, геологии, промышленной технике, например при дистанционном управлении сложными производственными процессами для работы роботов, в видеотехнике и других отраслях народного хозяйства. Сущность изобретения: привод панкратической системы содержит двухлинзовый панкратический объектив 2, в котором линзы жестко закреплены в опорах кареток 5 с осями, установленными в продольных направляющих 8. Программный кулачок 15 с рабочими поверхностями выполнен в виде полого цилиндра с рабочими поверхностями в виде многовиткового внутреннего выступа и установлен соосно оптической оси. На каждую ось 6 каретки 5, 7 установлен вкладыш 12, на котором закреплены две оси, преимущественно под углом 90o, на которых установлены подшипники 14, контактирующие с рабочими поверхностями программного кулачка 15. 6 ил.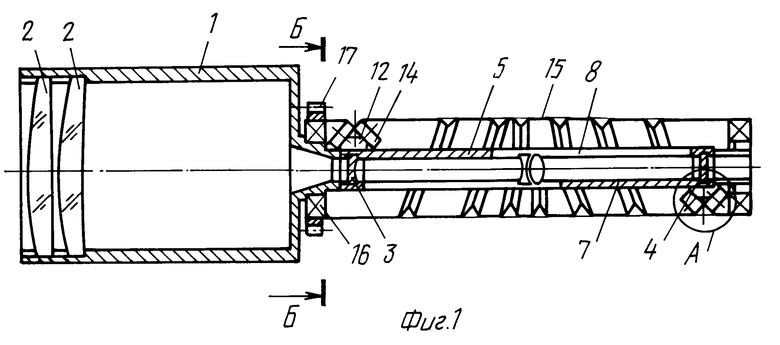
Привод панкратической системы, содержащий каретки, установленные в продольных направляющих, и несущие оправы, в которых жестко закреплены линзы панкратической системы, программный кулачок с рабочими поверхностями и оси, закрепленные на каретках для взаимодействия с рабочими поверхностями программного кулачка, отличающийся тем, что он снабжен вкладышами, на каждом из которых закреплено по две оси, преимущественно под углом 90o, и подшипниками, при этом программный кулачок выполнен в виде полого цилиндра с рабочими поверхностями в виде многовиткового внутреннего выступа и установлен соосно оптической оси, причем вкладыши закреплены на осях кареток, а подшипники установлены на осях вкладышей с возможностью взаимодействия с рабочими поверхностями программного кулачка.
| Чуриловский В.Н | |||
| Теория оптических приборов.-М.: Машиностроение, 1966, с.387. |
