Изобретение относится к оптической технике и может быть использовано в оптическом приборостроении.
Известна система переменного увеличения, применяющаяся для имитации дальности до объекта [1], которая содержит двигатель, соединенный через редуктор с валом цилиндрического кулачка с двумя рабочими поверхностями, с которыми контактируют каретки с расположенными на них компонентами оптической системы, потенциометр дальности, соединенный через редуктор с валом цилиндрического кулачка, выход потенциометра дальности соединен с входом блока управления, выход которого соединен с обмотками двигателя.
Наличие датчика положения кулачка и дополнительного редуктора в данном устройстве приводит к увеличению габаритов устройства, что является его существенным недостатком.
Прототипом предлагаемого изобретения является привод панкратического объектива [2].
Устройство содержит шаговый двигатель, связанный через редуктор с кулачком, выполненным в виде цилиндра с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, блок управления, содержащий формирователь коэффициентов, N выходов которого соединены с соответствующими управляющими входами делителя частоты, где N - число скоростей вращения и N≥2, выход делителя частоты соединен с входом сдвигового регистра и информационным входом формирователя коэффициентов, задающий генератор, выход которого соединен с информационным входом делителя частоты, а выходы сдвигового регистра соединены соответственно с первой - четвертой обмотками шагового двигателя.
Устройство работает следующим образом.
При подаче питания на блок управления задающий генератор начинает формировать опорную частоту, при этом формирователь коэффициентов выдает на делитель частоты коэффициент деления K1. С выхода делителя частоты сформированная частота F1 поступает на сдвиговый регистр и вход формирователя коэффициентов. Шаговый двигатель начинает вращаться с частотой ω1, передавая вращение через редуктор на кулачок, который перемещает каретки. Формирователь коэффициентов, отсчитав запрограммированное число периодов частоты F1, выдает на делитель частоты коэффициент К2, сбросив K1. С этого времени двигатель начинает вращаться с частотой ω2. Таким образом, за весь период вращения кулачка скорость вращения кулачка имеет N значений.
Комбинированное управление перемещением кареток за счет кулачкового механизма и изменения скорости вращения шагового двигателя позволяет оптимизировать угол подъема профиля кулачка во всем диапазоне угла поворота кулачка, реализовать большой диапазон скоростей перемещений оптических компонентов при минимальном диаметре кулачка. Применение шагового двигателя дает возможность точно отрабатывать угол поворота кулачка без датчика положения.
Однако дискретное изменение угловой скорости вращения шагового двигателя не дает возможности полностью использовать преимущества управления скоростью двигателя, так как в интервале вращения двигателя с фиксированной скоростью ωn, угол подъема профиля кулачка изменяется в большом диапазоне. Кроме того, при реализации нескольких законов изменения увеличения панкратического объектива в одном приборе, довольно трудно совместить участки вращения с постоянной скоростью, чтобы величина угла подъема профиля кулачка не вышла из допустимого диапазона, для траекторий с разными диапазонами скоростей.
Задачей изобретения является расширение диапазона скоростей перемещения оптических компонент панкратического объектива.
Решение поставленной задачи достигается тем, что в приводе панкратического объектива, содержащем шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически Связанные с кулачком, блок управления с задающим генератором, выход которого соединен с информационным входом делителя частоты и формирователь коэффициентов, информационный вход которого соединен с выходом делителя частоты, а выход с входом установки коэффициентов делителя частоты, формирователь коэффициентов выполнен на двоичном счетчике и запоминающем устройстве, причем информационный вход двоичного счетчика соединен с выходом делителя частоты, а выход с адресным входом запоминающего устройства, выход задания коэффициентов и выход разрешения счета которого соответственно соединены с входом установки коэффициентов и входом разрешения счета делителя частоты, при этом привод снабжен имеющим вход установки траекторий мультиплексором, информационные входы которого соединены с выходами траекторий запоминающего устройства, а выход с четырьмя обмотками шагового двигателя.
В программируемом запоминающем устройстве зашиваются законы изменения во времени сигналов, подаваемых непосредственно на обмотки шагового двигателя. Для управления каждой обмоткой шагового двигателя используется один разряд информационного выхода запоминающего устройства, причем изменение логического уровня информационного выхода соответствует перемещению двигателя на один шаг. Это дает возможность задать во всем диапазоне вращения оптимальный угол подъема профиля кулачка; исходя из этого, рассчитать требуемый закон изменения угла поворота шагового двигателя во времени и зашить в запоминающем устройстве сигналы, формирующие интервалы времени для каждого шага. Изменение частоты опроса запоминающего устройства с помощью установки соответствующего коэффициента деления делителя частоты по мере уменьшения скорости вращения шагового двигателя позволяет более эффективно использовать объем памяти запоминающего устройства.
Указанный прием - зашивка в запоминающем устройстве требуемых законов изменения сигналов, подаваемых на обмотки шагового двигателя, - позволяет максимально облегчить работу кулачкового механизма, значительно расширить диапазон по скорости вращения кулачка и, соответственно, расширить диапазон скоростей перемещения кареток панкратического объектива. Поскольку кулачок выполняется с небольшими перепадами величины угла подъема профиля, обеспечивается возможность реализации в одном устройстве нескольких законов изменения увеличения панкратического объектива, для чего необходимые информационные выходы запоминающего устройства переключаются к обмоткам двигателя с помощью мультиплексора.
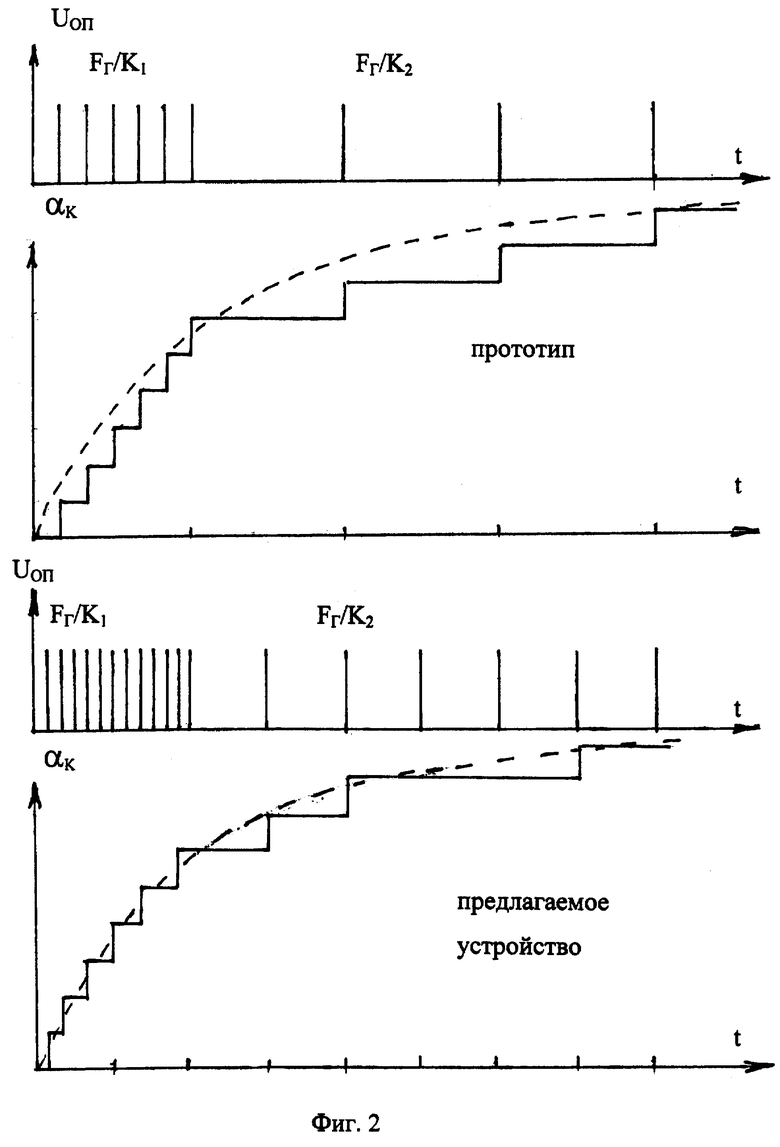
На фиг.1 представлена функционально-кинематическая схема предлагаемого привода панкратического объектива. На фиг.2 представлены графики изменения угла поворота кулачка во времени для прототипа и предлагаемого устройства.
Привод панкратического объектива состоит из шагового двигателя 1, приводящего в движение через редуктор 2 цилиндрический кулачок с профилированными канавками на образующей 3, который кинематически связан с каретками 4, 5, блока управления, содержащего задающий генератор 6, выход которого соединен с информационным входом делителя частоты 7, выход делителя частоты 7 соединен с информационным входом двоичного счетчика 8, выход которого соединен с адресным входом запоминающего устройства 9, выход задания коэффициентов запоминающего устройства 9 соединен с входом установки коэффициентов делителя частоты 7, выход разрешения счета запоминающего устройства 9 соединен с входом разрешения счета делителя частоты 7. Привод содержит мультиплексор 10, информационные входы которого соединены с выходами траекторий запоминающего устройства 9, а выход соединен с четырьмя обмотками шагового двигателя 1; при этом мультиплексор имеет вход установки траекторий.
В предлагаемом устройстве может быть использован шаговый двигатель серии ДШР, редуктор выполняется на паре цилиндрических зубчатых шестерен, цилиндрический кулачок, имеющий две рабочие поверхности, выполняется вращательным с роликовым толкателем, перемещение кареток может быть выполнено по цилиндрическим направляющим.
Блок управления осуществляет регулирование скорости шагового двигателя по программе за счет изменения частоты импульсов напряжения, подаваемого на его обмотки. Задающий генератор может быть реализован на микросхеме К564ГГ1. Делитель частоты может быть выполнен, например, на микросхеме К561 ИЕ11, двоичный счетчик представляет собой каскадное соединение, например, микросхем К561 ИЕ10. В качестве запоминающего устройства могут быть использованы программируемые запоминающие устройства с большой информационной емкостью, например, микросхемы К573 РФ8. Известны мультиплексоры на микросхемах К564 КП1, К564 КП2.
Устройство работает следующим образом.
При подаче питания задающий генератор 6 формирует сигнал опорной частоты, который поступает на информационный вход делителя частоты 7. Делитель частоты 7 начинает выдавать импульсы напряжения, поступающие на информационный вход двоичного счетчика 8, частота которых уменьшена по сравнению с частотой опорных импульсов в соответствии с числом, подаваемым по входу установки коэффициента деления. Число в двоичном коде с выхода двоичного счетчика 8 подается на адресный вход запоминающего устройства 9 - происходит считывание информации о длительности интервала между шагами. Каждое изменение состояния выходов траектории запоминающего устройства 9 соответствует перемещению вала двигателя 1 на один шаг. Задание закона движения шагового двигателя 1 производится установкой соответствующего числа в двоичном коде по входу установки траекторий мультиплексора 10, который подключает соответствующие выходы траекторий запоминающего устройства 9 к обмоткам двигателя. Шаговый двигатель 1 приводит в движение через редуктор 2 цилиндрический кулачок 3, который придает поступательное перемещение кареткам 4 и 5. Движение шагового двигателя 1 по программе происходит до блокировки разрешения счета делителя частоты 7 по сигналу с выхода разрешения счета запоминающего устройства 9. По мере уменьшения скорости вращения цилиндрического кулачка 3 уменьшается и частота изменения информации на выходе траекторий запоминающего устройства 9. Поэтому, для более рационального использования объема памяти запоминающих микросхем, во время движения панкратики уменьшается частота опроса запоминающего устройства 9 за счет изменения числа по входу установки коэффициента деления делителя частоты 7.
На фиг.2 представлены графики, поясняющие формирование временных интервалов между шагами для управления шаговым двигателем. В прототипе применяется способ кусочно-линейной аппроксимации - на каждом участке скорость вращения двигателя постоянна и определяется частотой сигнала с выхода делителя частоты. В предлагаемом устройстве интервалы между шагами выбираются из условия минимальной ошибки отработки желаемой траектории. В данном случае частота сигнала с выхода делителя частоты, которая является частотой опроса выходов траекторий запоминающего устройства, значительно выше, что уменьшает ошибки, обусловленные дискретностью по времени.
Таким образом, предлагаемый привод панкратического объектива позволяет значительно расширить диапазон перемещения оптических компонент по скорости и реализовать в одном устройстве несколько законов изменения увеличения панкратического объектива за счет обеспечения плавного регулирования (с дискретностью одного шага) скорости вращения шагового двигателя и реализации оптимального подъема профиля кулачка во всем диапазоне вращения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Лазарев А.П., Лазарев В.Л. Оптико-электронные приборы управления летательными аппаратами. М.: Машиностроение. 1987.
2. А.с. 1732319 А1, кл. G 02 В 15/14.
3. Фаддеева Л.А. Теория механизмов и детали машин. Л.: Машиностроение. 1983.
4. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. Пер. с англ. М.: Энергоатомиздат. 1987.
5. Шило В.Л. Популярные цифровые микросхемы. Справочник. М.: Радио и связь. 1987.
6. Под редакцией Гордонова А.Ю. и Дьякова Ю.Н. Большие интегральные схемы запоминающих устройств. Справочник. М. Радио и связь. 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПАНКРАТИЧЕСКОГО ОБЪЕКТИВА | 2003 |
|
RU2260826C1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ШЛИФОВАНИЯ ВИНТОВЫХ КАНАВОК РЕЖУЩЕГО ИНСТРУМЕНТА | 1990 |
|
RU2031771C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ТЕЛЕГРАФНЫХ РАДИОСИГНАЛОВ | 1990 |
|
RU2009615C1 |
| СИНХРОННЫЙ АДАПТИВНЫЙ МУЛЬТИПЛЕКСОР | 1993 |
|
RU2078401C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИНФОРМАЦИИ С ФОТОНОСИТЕЛЯ | 1991 |
|
RU2024941C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
Привод панкратического объектива содержит шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, блок управления с задающим генератором, выход которого соединен с информационным входом делителя частоты, и формирователь коэффициентов. Формирователь коэффициентов содержит двоичный счетчик и запоминающее устройство. Информационный вход двоичного счетчика соединен с выходом делителя частоты, а выход - с адресным входом запоминающего устройства, выход задания коэффициентов и выход разрешения счета которого соответственно соединены с входом установки коэффициентов и входом разрешения счета делителя частоты. Привод снабжен имеющим вход установки траекторий мультиплексором, информационные входы которого соединены с информационными выходами запоминающего устройства, а выход - с четырьмя обмотками шагового двигателя. Обеспечивается расширение диапазона скоростей перемещения оптических компонент панкратического объектива. 2 ил.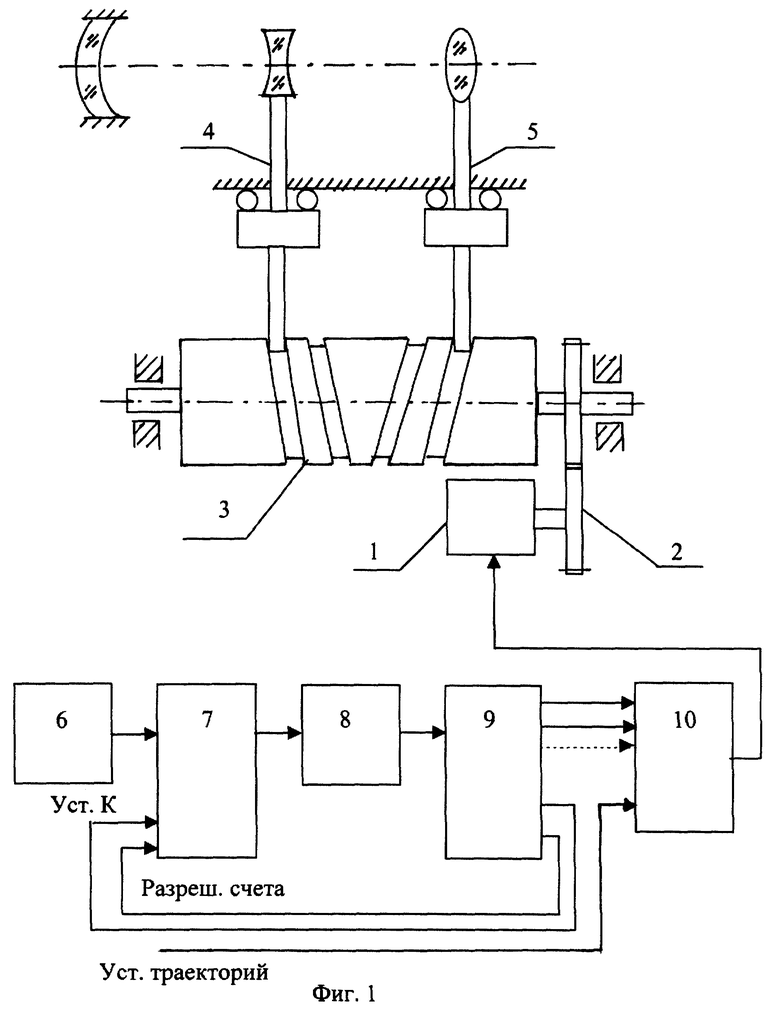
Привод панкратического объектива, содержащий шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, блок управления с задающим генератором, выход которого соединен с информационным входом делителя частоты, и формирователь коэффициентов, отличающийся тем, что формирователь коэффициентов выполнен на двоичном счетчике и запоминающем устройстве, причем информационный вход двоичного счетчика соединен с выходом делителя частоты, а выход - с адресным входом запоминающего устройства, выход задания коэффициентов и выход разрешения счета которого соответственно соединены с входом установки коэффициентов и входом разрешения счета делителя частоты, при этом привод снабжен имеющим вход установки траекторий мультиплексором, информационные входы которого соединены с информационными выходами запоминающего устройства, а выход - с четырьмя обмотками шагового двигателя.
| Привод панкратического объектива | 1990 |
|
SU1732319A1 |

