Изобретение относится к области ракетной техники и может найти широкое применение для управляемых ракетных комплексов, а также, например, для дистанционного управления сложных производственных процессов, работы роботов, процессах, связанных с вредным для здоровья производством, и других нужд народного хозяйства.
Известно сканирующее устройство лазерного излучателя [1], который включает в себя объектив, панкратическую систему, два полупроводниковых квантовых генератора (ПКГ), два гальванометра, обеспечивающих последовательное сканирование лазерных лучей в горизонтальной и вертикальной плоскостях; светоделительную пластину.
В техническом решении просканированное излучение излучающих полосок лазеров пропускают через светоделительную пластину, которая в поле зрения уменьшает энергетические характеристики системы в два раза.
Наиболее близким по технической сути является техническое решение сканирующего устройства лазерного излучателя [2], которое содержит приемник света, установленный на летательном аппарате, светоизлучатель, расположенный в районе запуска летательного аппарата для создания неподвижного относительно тонкого светового луча, сканирующее приспособление для развертки светового луча, имеющее два плоских зеркала, короткофокусную и длиннофокусную линзы. Устройство содержит блок увеличения диаметра неподвижного луча в несколько раз и направления увеличенного луча на первое плоское зеркало; блок перемещения второго плоского зеркала относительно первого зеркала; блок качания первого и второго зеркал вокруг взаимно перпендикулярных осей, совершающих синусоидальное и косинусоидальное смещение так, что спирально сканирующий луч отражается от второго плоского зеркала. Имеется блок направления спирально сканирующего луча в сторону приемника света на летательном аппарате через короткофокусную и длиннофокусную линзы в указанной последовательности и блок управления углом излучения сканирующего светового луча в зависимости от промежутка времени, прошедшего после запуска летательного аппарата, который позволяет сохранить постоянной площадь развертки сканирующего луча на приемнике света.
В техническом решении применяются для сканирования светового луча два плоских зеркала, которым требуется высокая точность изготовления.
Механизмам сканирования плоскими зеркалами требуется также повышенная точность и сложность изготовления, так как имеют малые углы поворота плоскими зеркалами, что ограничивает их применение из-за высокой трудоемкости по сравнению со сканированием светового луча светопропускающими плоскопараллельными пластинами.
Цель изобретения - упрощение сканирующего устройства с одновременным увеличением точности изготовления лучевой системы наведения.
Поставленные цели достигаются тем, что сканирующее устройство лучевой системы наведения содержит светопропускающие плоскопараллельные пластины, жестко закрепленные в оправах, например, с подшипником и установленные на осях в корпусе во взаимно перпендикулярных плоскостях с приводом, датчик положения луча, а привод выполнен в виде кулачков, преимущественно цилиндрических, с рабочими поверхностями, выполненными на половине цилиндра каждого кулачка и смещенными на 90o относительно друг друга, при этом каждый кулачок взаимодействует с соответствующей подпружиненной к упору оправой, причем упоры выполнены в виде выступов на корпусе или в виде цилиндрических не рабочих зон кулачков.
Сканирующее устройство лучевой системы позволило применить светопропускающие плоскопараллельные пластины, которые обеспечивают простоту изготовления и точность привода сканирующего устройства при пропускании полной длины излучающих полосок в поле зрения.
Устройство блочного полого кулачка на оптической оси позволяет конструктивно выполнит привод сканирующего устройства малогабаритным и компактным.
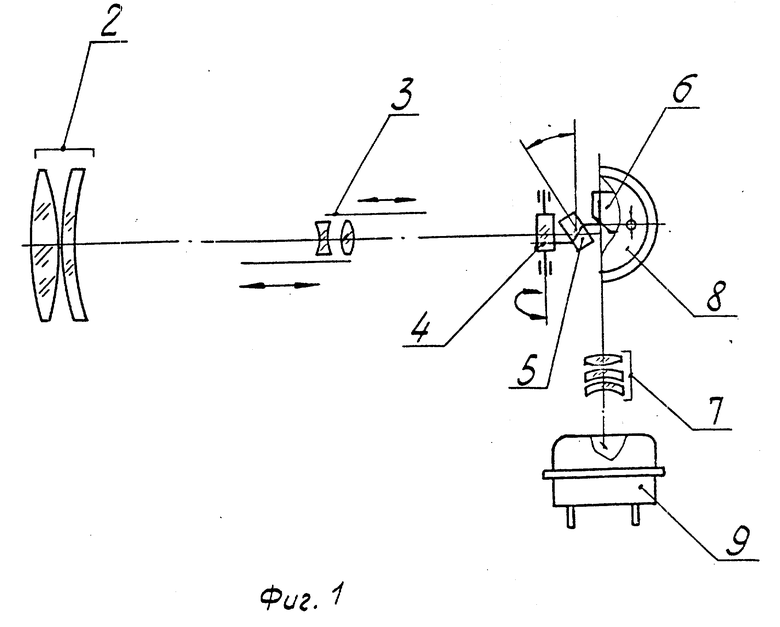
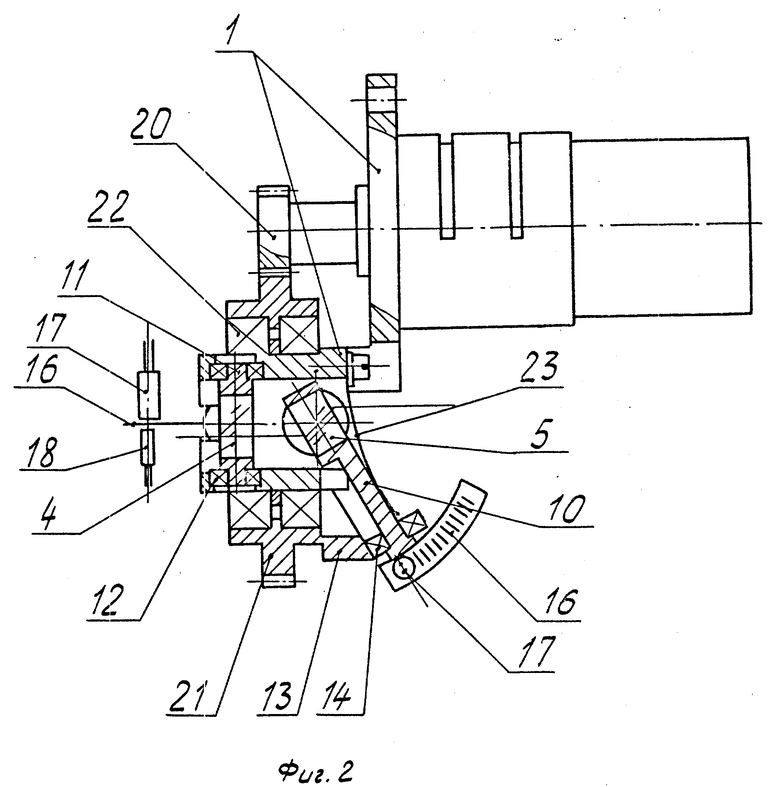
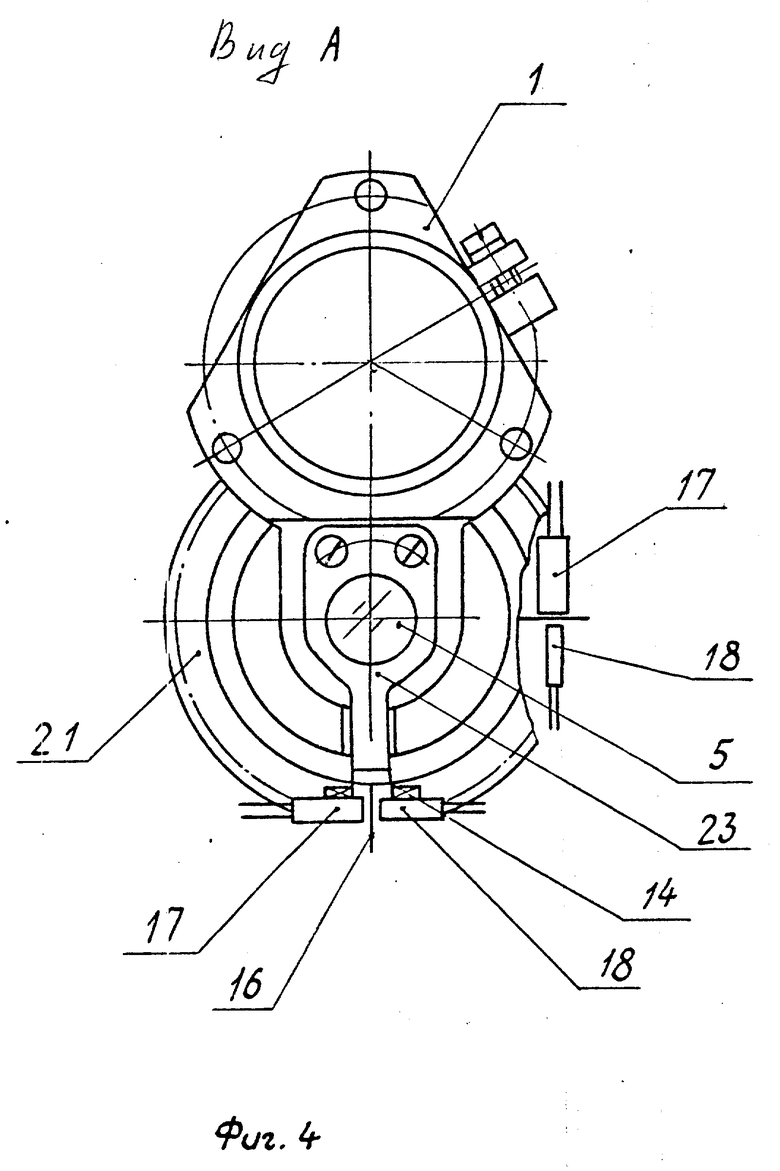
На фиг. 1 изображена оптическая схема лучевой системы наведения; на фиг. 2 - сканирующее устройство лучевой системы наведения; на фиг. 3 - сканирующее устройство лучевой системы наведения с повернутым блочным кулачком на 90o; на фиг. 4 - сканирующее устройство лучевой системы наведения, вид А на фиг. 3.
Лучевая система наведения содержит корпус 1 и последовательно установленные на оптической оси лучевой системы наведения объектив 2, панкратический объектив 3 панкратической системы, светопропускающие плоскопараллельные пластины 4, 5 сканирующего устройства лучевой системы наведения, установленные в корпусе 1 во взаимно перпендикулярных плоскостях, призму 6 с отражающими зеркальными поверхностями, выполненными на призме в виде фасок под углом 45o к оптической оси, конденсаторы 7, два полупроводниковых квантовых генератора 8, 9 (ПКГ), работающих по горизонтали и вертикали в импульсном режиме, при этом излучение полупроводниковых квантовых генераторов 8, 9 представляет узкую излучающую полоску, развернутую в корпусе 1 до Г-образного излучения на зеркалах призмы 6, при этом сканирующее устройство лучевой системы наведения содержит светопропускающую плоскопараллельную пластину 4, обеспечивающую сканирование плоского луча в поле зрения, например, по горизонтали и вторую светопропускающую плоскопараллельную пластину 5 - по вертикали, причем каждая светопропускающая плоскопараллельная пластина 4, 5 закреплена жестко в своей оправе 1, они через оси 11 установлены в корпусе 1, через подшипник 12 с возможностью поворота во взаимно перпендикулярных плоскостях, блочный, например, цилиндрический кулачок 13, рабочие поверхности которого размещены на половине цилиндра кулачка и совмещены со второй половиной цилиндра не рабочей зоной, причем кулачки смещены один относительно другого на 90o, а рабочие зоны кулачков совмещены с подшипниками 14 (стальным шариком), оси 15, которые закреплены на оправах 10 светопропускающих пластин 4, 5, при этом на оправах 10 жестко закреплены пластины 16 датчика положения луча с прозрачными окнами, размещенными между фотодиодами 17 и светодиодами 18, электродвигатель 19, шестерню 20, закрепленную на оси электродвигателя 19 и зацепленную с шестерней 21 блочного кулачка 13, установленного на корпусе 1 на подшипниках 22, при этом каждая оправа 10 подпружинена упругим элементом 23 к упорам на корпусе 1, а между не рабочими зонами блочного кулачка 13 и подшипниками 14 имеется зазор.
Светопропускающие плоскопараллельные пластины 4, 5 могут располагаться перпендикулярно оптической оси сканирующего устройства лучевой системы наведения двумя вариантами.
Первый вариант описан (см. выше), а второй вариант заключается в том, что подшипники 14 (стальные шарики) оправ 10 подпружинены упругим элементом 22 к не рабочим зонам блочного кулачка 13, при этом не рабочие зоны блочного кулачка 13 изготавливаются с высокой точностью, а на корпусе 1 нет упоров, так как подшипники 14 оправ 10 контактируют по рабочим поверхностям и не рабочим зонам блочного кулачка 13.
При работе сканирующего устройства лучевой системы наведения лазерный луч генерируется поочередно двумя полупроводниковыми квантовыми генераторами 8, 9, причем одна излучающая полоска ПКГ8 используется при наведении ракеты по горизонтали, а другая - по вертикали.
Включаются привода панкратического объектива 3 светопропускающих плоскопараллельных пластин 4, 5 (подается электрический сигнал на электродвигатели), включают датчик положения луча, включают полупроводниковый квантовый генератор 9 по вертикали, излучение через конденсатор 7, зеркало призмы 6, светопропускающие плоскопараллельные пластины 5, 4, панкратический объектив 3, объектив 2 поступает на цель, образуя начало поля зрения сканирования по вертикали.
При вращении вала электродвигателя 19 шестерня 20 передает вращение шестерне 21 блочного кулачка 13, рабочая поверхность которого поворачивает оправу 10 и жестко закрепленную на ней светопропускающую плоскопаралльную пластину 5 до ее поворота перпендикулярно оптической оси, при этом пластина 16 датчика положения луча перемещается относительно фотодиода 17 и светодиода 18, дает информацию положения лазерного луча в поле зрения.
При заканчивании рабочей поверхности блочного копира 13 по вертикали, оправа 10 с помощью пружины 23 становится на упор корпуса 1 (во втором варианте технического решения подшипник 14 обкатывается по не рабочей зоне блочного кулачка 13, при этом не рабочая зона является упором для оправ 10 со светопропускающими плоскопараллельными пластинами 4, 5), при этом подшипник 14 не контактирует с не рабочей зоной блочного кулачка 13. А светопропускающая плоскопараллельная пластина 5 становится перпендикулярно оптической оси лучевой системы наведения.
При заканчивании рабочей поверхности одного кулачка начинается рабочая поверхность другого кулачка, для поворота второй светопропускающей плоскопараллельной пластины 4 по горизонтали, при этом рабочая поверхность второго кулачка через подшипник 14, оправу 10 поворачивает светопропускающую плоскопараллельную пластину 4 из положения перпендикулярного оптической оси лучевой системы наведения до максимального (рассчитанного в оптической схеме) угла поворота и обратно в положение перпендикулярно оптической оси.
При этом цикл поочередного сканирования двух светопропускающих плоскопараллельных пластин 4, 5 по вертикали и горизонтали повторяется непрерывно. При полете ракеты изображения излучающих полосок ПКГ8 по горизонтали и ПКГ9 по вертикали непрерывно формируется в плоскости ракеты с помощью программного перемещения подвижных элементов панкратического объектива 3 (оптическая панкратическая система).
На фотодиодах 17 по горизонтали и вертикали датчика положения луча вырабатываются сигналы о пространственном положении каждого луча относительно среднего значения, совпадающего с линией визирования.
Принцип действия системы управления основан на использовании время импульсной модуляции.
В предлагаемом техническом решении по сравнение с известным прототипом увеличивается точность наведения с одновременным упрощением сканирующего устройства лучевой системы наведения, так как угол поворота светопропускающими плоскопараллельными пластинами значительно больше, чем при сканировании плоскими зеркалами.
Сканирующее устройство лучевой системы наведения позволяет в поле зрения использовать всю длину излучающих полосок лазеров при симметричном сканировании относительно оптической оси лучевой системы наведения, сохранить при этом высокие энергетические характеристики лучевой системы наведения.
Предполагается, что сканирующее устройство лучевой системы наведения найдет широкое применение в разных областях науки и техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПАНКРАТИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2111440C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2000 |
|
RU2188380C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ И СПОСОБ ЮСТИРОВКИ ПАРАЛЛЕЛЬНОСТИ ОПТИЧЕСКИХ ОСЕЙ ИНФОРМАЦИОННОГО И ВИЗИРНОГО КАНАЛОВ | 2003 |
|
RU2249782C2 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436033C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 1996 |
|
RU2108531C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
Сканирующее устройство лучевой системы наведения может быть использовано для управляемых ракетных комплексов, дистанционного управления сложных производственных процессов, работы роботов, процессах, связанных с вредным для здоровья производством и других нужд народного хозяйства. Светопропускающие плоскопараллельные пластины 4 жестко закреплены в оправах 10 и установлены на осях 11 в корпусе 1 во взаимно перпендикулярных плоскостях с приводом. Привод выполнен в виде кулачков 13, преимущественно цилиндрических. Рабочие поверхности кулачков выполнены на половине цилиндра каждого кулачка 13 и смещены на 90o относительно друг друга. Каждый кулачок 13 взаимодействует с соответствующей подпружиненной к упору оправой 10 через установленный на оправе подшипник 14. Упоры 10 выполнены в виде выступов на корпусе или в виде цилиндрических нерабочих зон кулачков. 2 з.п.ф-лы, 4 ил.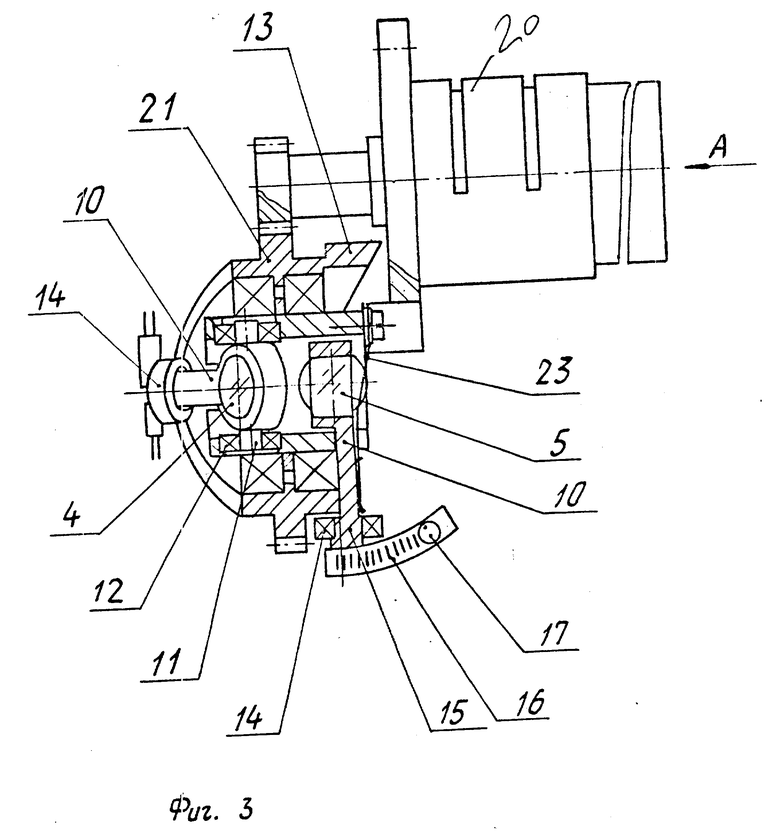
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4111383, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 4330099, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
