Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
В настоящее время известен способ формирования оптического поля для телеориентирования управляемых объектов и устройства для его осуществления [1] .
Указанный способ включает в себя излучение оптического потока и заполнение им зоны в окрестности оптической оси визира, при этом заполнение зоны производится путем ее сканирования плоскими лучами, отклоняемыми со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира.
Известное устройство для осуществления этого способа содержит установленные соосно визир и прожектор, выполненный в виде как минимум одной пары аналогичных ветвей, каждая из которых содержит схему запуска, а также последовательно установленные инжекционный лазер, отклоняющий оптический элемент и объектив, при этом лазер установлен вблизи фокальной плоскости системы, образуемой объективом и отклоняющим оптическим элементом, излучающие области лазеров установлены перпендикулярно осям измеряемых координат, отклоняющие оптические элементы выполнены в виде цилиндрических линз, закрепленных в общей рамке, установленной на коленчатых валиках с возможностью плоскопараллельного движения по окружности, при этом оси цилиндрических поверхностен линз параллельны излучающим областям лазеров, входы схем запуска соединены с выходами формирователя импульсов, входы которых подсоединены к выходам блока модуляции, входы которого соединены с приводом рамки и первым выходом программного устройства, выходы схем запуска соединены с лазером, второй выход программного устройства соединен с приводом рамки.
Недостатком данного устройства является то, что в нем используются как минимум два отклоняющих оптических элемента на общей рамке с единым приводом и единым каналом синхронизации работы лазеров с фазой вращения рамки. В этом случае требуется высокая точность фазового расположения отклоняющих цилиндрических линз в рамке, т.е. например, при крайнем отклонении цилиндрической линзы ветви, осуществляющей кодирование горизонтальной координаты, вправо (влево) относительно оптической оси ветви цилиндрическая линза другой ветви должна находиться строго вверху (внизу) относительно оптической ветви своего канала. В случае нарушения данного условия возникают ошибки кодирования координат на частоте вращения рамки, обусловленные разницей передаваемых в луче координат при прямом ходе сканирующего луча (например, снизу - вверх или слева - направо) и обратном ходе (например, сверху - вниз или слева - направо). Данный недостаток устраняется при использовании единого отклоняющего оптического элемента для обоих лазерных каналов, как в наиболее близком по технической сущности к предлагаемому изобретению оптическом прицеле системы наведения управляемого снаряда [2], содержащем два инжекционных лазера, излучающие области которых установлены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, на которой последовательно установлены оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью панкратического объектива.
В данном устройстве исключены ошибки кодирования, присущие устройству [1] , однако, т.к. в нем сканирование поочередно производится различными частями плоских лучей, то при погрешностях установки излучающих областей лазеров перпендикулярно осям измеряемых координат так же возникают ошибки кодирования на частоте вращения сканера ("двоение" прямого и обратного хода луча).
Задачей данного изобретения является повышение точности кодирования координат при формировании оптического поля по способу [1].
Поставленная задача достигается тем, что в оптический прицел системы наведения, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, введена непрозрачная шторка, установленная на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов, при этом шторка выполнена в виде непрозрачного сектора с углом разворота 180o, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие оптических осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90o, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам формирователя импульсов, первый и второй выходы которого подключены соответственно ко входам первого и второго лазеров, а схемы задержки имеют возможность регулировки времени задержки в диапазоне от 0 до Tα/π: где Т - период вращения призмы; α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора.
При этом формирователь импульсов содержит опорный генератор, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, счетчик времени, постоянное запоминающее устройство (ПЗУ), преобразователь код-время и коммутатор. Первый и второй входы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также первый и второй входы ПЗУ подключены соответственно к первым и вторым входам формирователя импульсов, выход схемы ИСКЛЮЧЕНИЕ ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен ко входу преобразователя код-время, выход которого подключен ко второму входу коммутатора каналов, первый и второй выходы которого подключены соответственно к первому и второму выходам формирователя импульсов, при этом вторые входы счетчика времени и преобразователя код-время подключены к выходу опорного генератора.
На фиг. 1 представлена структурная схема прожектора.
На фиг. 2 представлена функциональная схема формирователя импульсов.
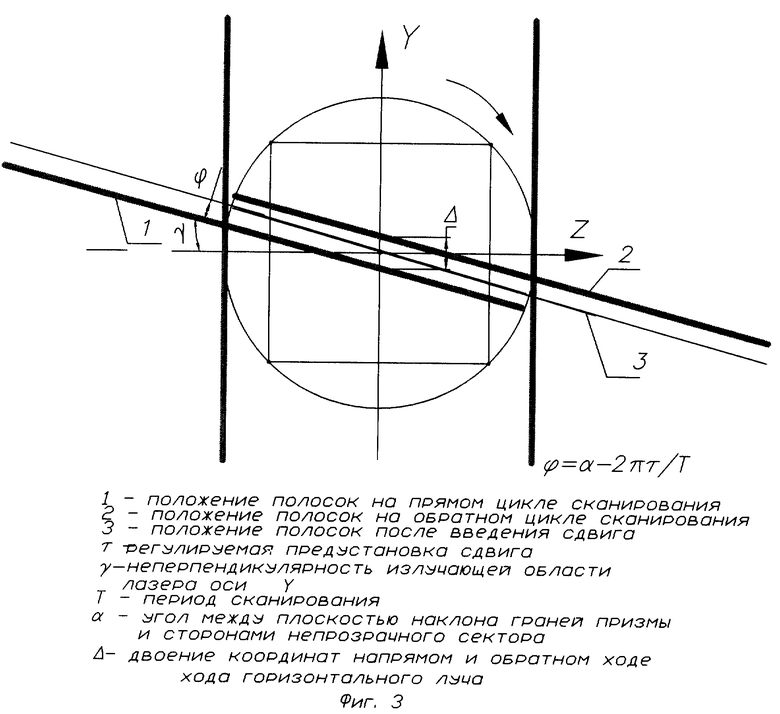
На фиг. 3 показан принцип компенсации неперпендикулярности излучающей области лазера одной из измеряемых координат.
На фиг. 4 представлены эпюры сигналов на одном цикле сканирования.
Примером реализации данного устройства служит прожектор (фиг. 1), содержащий два инжекционных лазера 1 и 2, систему вывода излучения лазеров на единую оптическую ось, выполненную, например, в виде поляризационного кубика 3, оптический сканер 4, состоящий из вращающейся призмы 5, оправа которой выполнена в виде непрозрачного полудиска 6, двух неподвижных оптронных датчиков 7 и 8, панкратического объектива 9, а также двух схем задержки 10 и 11 и формирователя импульсов. При этом ось вращающей призмы 5 совмещена с оптической осью панкратического объектива 9, а оптические оси лазеров 1 и 2 после прохождения через кубик 3 также сопряжены с оптической осью объектива 9. Формирователь импульсов 12 содержит схему ИСКЛЮЧАЮЩЕЕ ИЛИ 13, счетчик времени 14, постоянное запоминающее устройство 15, преобразователь код-время 16, коммутатор каналов 17 и опорный генератор 18.
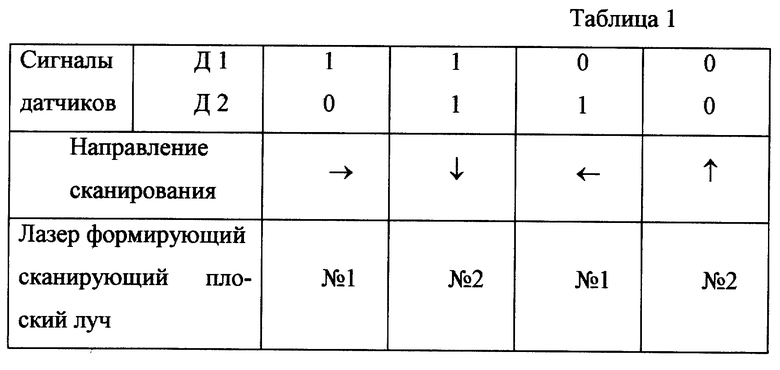
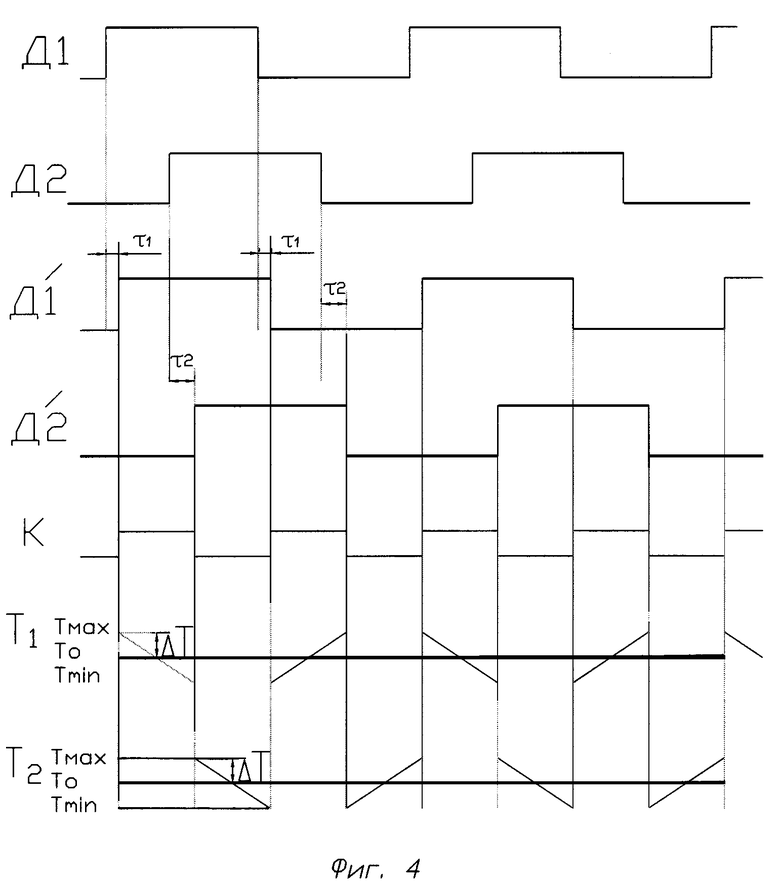
Представленный прожектор работает следующим образом. Вращающаяся призма 5 производит нутационное сканирование плоскими лучами лазеров 1 и 2 по формируемому полю, на дальности управляемого снаряда (см. фиг. 3). Радиус траектории сканирования на дальности управляемого снаряда поддерживается постоянным за счет изменения фокусного расстояния панкратического объектива 9. При этом в ходе вращения призмы 5 полудиск 6 производит последовательное прерывание сигнала в оптронных датчиках 7 и 8, на выходе которых формируются сигналы, представленные на фиг. 4 Д1 и Д2. При этом каждому из четырех комбинаций сигналов Д1 и Д2 соответствует определенное направление сканирования определенного плоского луча по формируемому полю (например, в соответствии с таблицей 1)
Сигналы датчиков Д1 и Д2, пройдя через схемы задержки 10 и 11, получают временной сдвиг в зависимости от предварительной настройки каждой из схем. Сигнал Д1' и Д2' на выходе схем задержки (см. фиг. 4) поступает на входы блока кодирования 12, в котором они поступают на адресные входы ПЗУ 15 и входы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 13, на выходе которой формируется сигнал К (см. фиг. 4), состояние "1" которого соответствует работе одного из каналов (например, сканирование по вертикальной координате), а состояние "0" - другого (например, по горизонтальной координате). От момента каждой смены уровня сигнала "К" счетчик времени 14 синхронно с частотой опорного генератора 18 формирует на своем выходе код, пропорциональный текущему времени, который подается на соответствующие адресные входы ПЗУ 15. В зависимости от состояния адресных входов ПЗУ 15 формирует на своем выходе код, в соответствии с которым преобразователь код-время 16 формирует парные импульсы, временной интервал между импульсами в паре при этом соответствует установленной комбинации входов Д1 и Д2 формирователя импульсов, а частота повторения посылок линейно меняется во времени, начиная с момента возникновения соответствующей комбинации.
Программа изменения частоты при этом обеспечивается постоянным запоминающим устройством 15 и может быть реализована, например, в соответствии с таблицей 2.
Сформированные парные импульсы подаются на коммутатор каналов 17, который в зависимости от состояния сигнала "К" (см. фиг. 4) подает их на первый или второй выходы формирователя импульсов, при этом период посылок на выходах блока будет соответствовать функциям T1 и T2 (см. фиг. 4).
Сигналы с выходов формирователя импульсов 12 подаются на входы соответствующих лазеров 1 и 2, которые синхронно с этими импульсами формируют импульсы лазерного излучения, которые проходят через поляризационный кубик 3, обеспечивающий отражение излучения лазера 2 от склейки и пропускание излучения лазера 1, используя эффект поляризации света вдоль областей накачки лазеров, которые взаимно перпендикулярны у лазеров 1 и 2.
Посылки лазерных импульсов, формируемые поочередно на каждой четверти оборота призмы 5, пройдя через оптическую схему, состоящую из вращающейся призмы 5 и панкратического объектива 9, формирует оптическое поле в соответствии со способом 1.
Представленные в данном устройстве новые блоки могут быть реализованы по широко известным схемам, так, например, счетчик времени и преобразователь код-время на базе двоичных счетчиков, коммутатор каналов на базе схем совпадения, а схемы задержки на базе триггера с задающей длительность задержки RC-цепью, в которой резистор R выполнен переменным для регулировки времени задержки в диапазоне от 0 до Tα/π, где T - период вращения призмы.
При работе данного устройства возможно возникновение пульсаций кодируемых координат на частоте вращения призмы, связанных с погрешностями установки перпендикулярности излучающих областей лазеров 1 и 2 относительно осей измеряемых координат, что показано на фиг. 3.
В этом случае при наличии неперпендикулярности ± γ области накачки лазера относительно координатной оси Y возникает двоение координат на прямом (при сканировании сверху - вниз) и обратном (снизу - вверх) ходе плоского луча по формируемому полю величиной Δ.
Однако, если при настройке прожектора отрегулировать соответствующую данному каналу схему задержки так, чтобы она обеспечивала временное запаздывание сигнала датчика на τ = (α±γ)• T/2n, то при прохождении через любую точку формируемого поля плоским лучом будет передаваться одинаковая частота посылок как на прямом, так и на обратном ходе данного луча. При этом предварительный разворот α шторки относительно плоскости наклона граней призмы необходим для того, чтобы компенсировать угловые ошибки γ любого знака.
Это позволяет снизить жесткость требований по перпендикулярности излучающих тел лазеров осям кодируемых координат и обеспечить при настройке прожектора высокую точность кодирования формируемого поля, исключив из спектра ошибок координат составляющую на частоте сканирования.
Наличие двух независимых каналов синхронизации модуляции лазеров с фазой поворота призмы позволяет отдельно настроить по минимуму ошибок кодирования каждую из координат формируемого поля. При этом величина разворота шторки 6 α и соответствующие ему диапазоны регулировки временного сдвига в схемах задержки 10 и 11 определяется, исходя из допусков на неперпендикулярность рабочих тел лазеров осям координат, угловых погрешностей установки самих оптронных пар 7 и 8, а также угловых погрешностей установки призмы относительно самой шторки 6. Во всех случаях регулировкой времени сдвига в каждом канале будет обеспечена компенсация влияния данных погрешностей на точность кодирования координат, если эквивалентная суммарная фазовая ошибка за счет всех перечисленных погрешностей не превысит выбранного угла α.
Таким образом повышается точность кодирования координат при формировании оптического поля, что является задачей предлагаемого технического решения.
Источники информации:
1. Патент РФ N2100745, МКИ F 41 G 7/26, 02.07.96.
2. Патент США N 4111385, НКИ 244-3.13, 05.09.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |


Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Техническим результатом изобретения является повышение точности кодирования координат при формировании оптического поля. Сущность изобретения заключается в том, что в оптический прицел введена непрозрачная шторка, установленная на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов. Шторка выполнена в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие оптических осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат. Причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам формирователя импульсов, первый и второй выходы которого подключены соответственно ко входам первого и второго лазеров, а схемы задержки имеют возможность регулирования времени задержки в диапазоне от 0 до Тα/π, где Т - период вращения призмы, α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора. 1 з.п. ф-лы, 4 ил., 2 табл.
| US 4111385, 05.09.1978 | |||
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| US 4330099, 18.05.1982 | |||
| Станция орбитальная заправочная криогенная | 2019 |
|
RU2729748C1 |
| DE 3441921 A1, 28.05.1986. | |||

