Для того чтобы управлять транспортным средством в тумане при отсутствии видимости, недостаточно иметь аппаратуру, сигнализирующую только о наличии препятствий или свободного пути перед транспортным средством, даже укомплектованную индикацией минимального расстояния между препятствиями и транспортным средством. Однако необходимо знать их местоположение с большими подробностями, чтобы возможным было принимать решения относительно маневров, которые следует выполнить, особенно в непосредственной близости от поворотов дороги, или чтобы обгонять, если впереди имеется слишком медленно идущее транспортное средство. Поэтому требуется индицировать геометрию свободного пространства впереди транспортного средства посредством двумерного квадранта, состоящего, например, из многочисленных световых пятен, которые сверкают красным или зеленым светом в каждом узком секторе впереди, если имеется или не имеется препятствие /фиг. 1/. Такой квадрант мог бы располагаться на приборном щитке таким образом, чтобы светящееся изображение отражалось передним ветровым стеклом в направлении водителя, позволяя ему наблюдать за изображением вместе с дорогой.
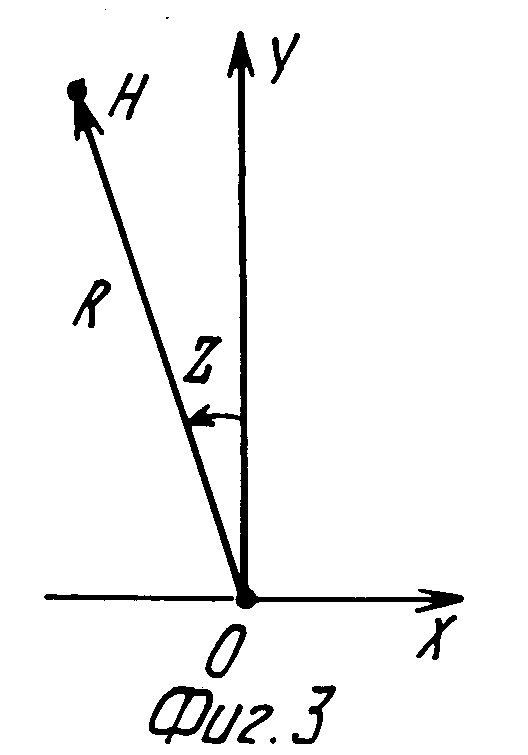
Другими словами, проблема состоит в том, чтобы измерять координаты возможных препятствий. Здесь будут использоваться полярные координаты (см. фиг. 3); расстояние (от препятствия) - мера радиус-вектора R=OH, наклон - угол Z, образованный радиус-вектором и вертикальной осью Y.
Мера R может выводиться из меры времени t, требуемого электромагнитным излучением, чтобы распространяться от антенны, расположенной в O, вплоть до препятствия H, отраженным от H и обратно в O. При данной скорости распространения C получаем: R=C•t/2.
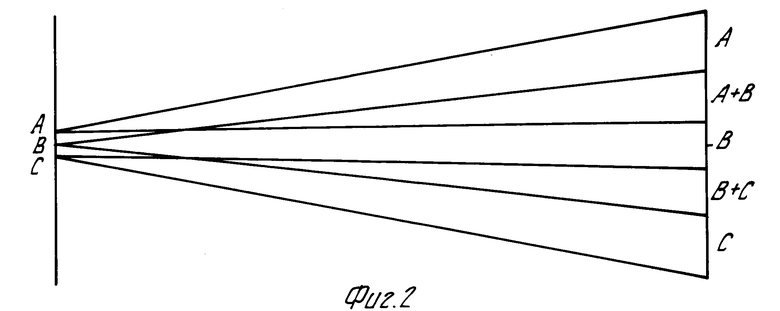
Для измерения угла Z используется n микроволновых лучей, испускаемых компактными неподвижными антеннами, слегка расходящимися для исследования участков, принадлежащих секторам 2n - 1 (например показано на фиг. 2, где n= 3). На фиг. 2 различаются угловые секторы и поэтому квантовать угол Z в пяти частях: если, например, препятствие располагается на центровой линии сектора B, таковое будет детектироваться только через луч B; если препятствие располагаться в промежуточном положении, например, в секторе A + B, таковое будет детектироваться как лучом A, так и лучом B.
Этот технический прием, который определяется в качестве "амплитудной дискриминации", кажется напоминающим принцип работы моноимпульсной РЛС, используемой в автоматических системах слежения /сопровождения/, но это не совсем точно; фактически такие системы являются эффективными, когда имеется только одна цель, однако являются менее эффективными, когда целей бывает больше, особенно если цели равноудалены от РЛС и сгруппированы. Напротив, имеется в виду сигнализировать относительно каждого отдельного препятствия с точностью, которая является удовлетворительной для большинства практически возможных конфигураций препятствий. Наиболее трудными конфигурациями, которые должны правильно распознаваться, являются конфигурации с препятствиями, когда они все выставлены по прямой на одинаковом расстоянии R от антенн, но за исключением определенных случаев, которые однако не уменьшают безопасность, обеспечиваемую системой, таковая все же снабжает достаточной информацией для предусмотрительного управления транспортным средством.
Методика, которая должна приниматься, является следующей. Допустим, для простоты n= 3 /фиг. 2/: три луча принадлежат трем антеннам A, B, C, которые являются одновременно передающими и принимающими и поэтому соединенными с соответствующими передатчиками и приемниками. Короткий радиочастотный импульс испускается по одному за один раз каждым из трех передатчиков, между тем как три приемника всегда являются одновременно готовыми к работе. Предположим, что импульс испускается только антенной A и что имеется только одно препятствие, постоянно расположенное в секторе A /см. фиг. 2/, на расстоянии R от антенны: после определенного периода времени эхо-сигнал, являющийся результатом отражения на препятствии, принимается антенной A, а не антеннами B и C; если препятствие находится в секторе A + B, эхо-сигнал принимается антеннами A и B, но не антенной C. Следующий импульс испускается антенной B: то же самое препятствие в секторе A + B будет отражать эхо-сигнал, принятый практически в тот же самый момент антеннами B и A, а не антенной C; однако, если препятствие располагается в секторе B, оно будет отражать эхо-сигнал, принятый только антенной B.
Понимается, что два и также три отдельных выравненных по одной прямой препятствия, расположенных на одинаковом расстоянии P от антенн и заключенных одно в секторе A, другое в секторе B и третье в секторе C без затрагивания сектора A + B или сектора B + C, могут отдельно распознаваться этим устройством, так как система принимает в первый момент времени эхо-сигнал только антенной A, во второй момент времени - антенной B и в третьей момент времени - только антенной C, но никогда одновременно антеннами A и B или антеннами B и C.
Одновременный прием случается по геометрическим соображениям, когда препятствие располагается в одном из общих секторов, например в секторе A + B и на расстоянии R от антенн. Фактически импульс, переданный антенной A, перехватывает препятствие и возвращается в качестве эхо-сигнала к обеим антеннам A и B и наоборот, импульс, переданный антенной B, перехватывает препятствие и возвращается в качестве эхо-сигнала к обеим антеннам B и A. Это случается независимо от того, являются ли сектор A или сектор B как по отдельности, так и в совокупности свободными или несвободными от препятствий, так как не представляется возможным распознать, являются ли также секторы A и B занятыми или не занятыми препятствиями на одинаковом расстоянии R, за исключением дальнейшей работы с сигналами, чтобы позволять указанное распознавание. Чтобы избежать такой работы с сигналами, приемлемо предположить худший случай, подобный тому, что секторы A и B также заключают в себя препятствия, выравненные по одной линии с препятствием в секторе A + B на том же расстоянии R: поэтому необходимо давать эквивалент сигнализации отдельному препятствию на расстоянии R с диапазоном, перекрывающим все три сектора A, A + B и B. Выбор этой сигнализации не составляет значительное ограничение системы: не нужно забывать, что фактически управление транспортным средством происходит в тумане, где все равно нужно совершать опасные маневры.
В секторе C на том же самом расстоянии R предполагается другое препятствие, но нет препятствия в секторе B + C: тогда сектор B + C будет показываться свободным от препятствий, между тем как сектор C будет давать сигнал относительно препятствия. В заключение при описанных лучах получается полная угловая информация относительно того, каким образом продолжать свои действия в тумане. Определяющие границы автомобильной дороги, дорожные ограждения или другие детектируемые поверхности, показанные на дисплее, будут представлять полное изображение пространства впереди водителя; фактически для полностью безопасного управления транспортным средством необходимо обеспечение отражающих микроволновое излучение поверхностей на краях дорог и транзитных зон, где таковое пропадает, чтобы избегать попадания в канавы, овраги и т.п.
Когда препятствие обнаруживается, например, в секторе A на расстоянии R = 50 м, можно предвидеть, что не только его предупредительный световой сигнал будет светиться, а также все световые сигналы, кроме него, на увеличивающихся расстояниях будут светиться, подобно показанным на фиг. 1 для всех световых пятен, имеющих отношение к сектору A на расстояниях R = 50, 60, 70. . . м. Это отражает тот факт, что препятствие маскирует все, что находится в его теневом конусе, как это обычно случается в оптических устройствах. Эта система также имеет преимущество в том, что обладает способностью превращать в необходимость избыток сигнализации, ранее описанный в связи с одновременным приемом.
Функционирование этой аппаратуры требует три фазы: первая фаза относится к исследованию распространения электромагнитных волн и выбору микроволновых устройств из n передающих-принимающих устройств с соответствующими антеннами. Вторая фаза относится ко всем тем схемам, которые возбуждают наиболее адекватные модуляции, усиления и комбинации излученных и принятых сигналов при возможностях получить данные, требуемые для вычислений R и Z. Третья фаза состоит в цифровом уточнении множества различных данных (R и Z), связанных не только с отдельным препятствиям, а также со сложными конфигурациями препятствий, которые должны индицироваться на дисплее; фактически слабые эхо-сигналы, прибывающие к приемникам, после адекватного усиления должны обязательно интерпретироваться в соответствии с описанным выше критерием посредством специализированной схемы, которая может быть цифрового типа и обладать способностью быстродействия и в уточнении: таковая является осуществимой без трудностей при более или менее уточненных технических решениях, имея в виду требуемое качество функционирования, таким образом никакого исполнения здесь не детализируется. Уточнение может давать в результате двумерное отображение, например, как показано на фиг. 1. Таким же образом, бесполезно отвлекаться на усиление слабых эхо-сигналов от приемников, так как эти виды функционирования являются известными согласно современной технике; аналогичные суждения могут быть высказаны относительно передатчиков и антенн. Подробности функционирования упомянутых выше частей могут пространно варьироваться от одной конструкции к другой, оставаясь в любом случае в пределах идеи данного изобретения.
Теперь раскрываются в качестве существенного примерного представления определенные наборы, приспособленные, чтобы обеспечивать простой прототип, который может подтвердить обоснованность нашей системы. Используем образователь сети Ганна трех идентичных объемных резонаторах с частотой 10 ГГц, (thrce identical resonant cavitios gunnplexer at 10 GHZ), каждый из которых обладает способностью генерировать и модулировать радиочастотный сигнал посредством диода Ганна и варактора, и детектировать эхо-сигнал посредством диода Шотки. Малогабаритные и направленные антенны рупорного типа подводятся к резонаторам так, чтобы образовывать три узких расходящихся луча (см. фиг. 2). Диоды Ганна питаются и резонаторы подвергаются калибровке к той же самой частоте f1. Соответствующая схема, называемая модулятором, генерирует очень короткие импульсы напряжения длительностью τ порядка нескольких десятых долей наносекунд каждый и обеспечивает возможность посылать их по одному за один раз каждому из трех варакторов в последовательности; таким образом, каждый резонатор в свое время совершает колебания в течение короткого периода времени τ с частотой f2 = f1 + fb, где fb определяется в зависимости от импульса напряжения, поданного к варактору. Поэтому последовательность микроволновых импульсов с частотой f2 излучается в течение периода времени τ одной из антенн, накрывает возможное препятствие, расположенное на расстоянии R, и малая отраженная часть возвращается в одну или более антенн после периода времени t = 2•R/C (причем C представляет скорость распространения волнового пакета); от этих антенн последовательность импульсов передается в соответствующие принимающие диоды Шотки. Но тем временем резонатор, который уже передал короткое колебание с частотой f2, возобновил колебания с частотой f1 и малая часть этого колебания также посылается его собственному диоду Шотки, который последовательно получает произведение этих двух упомянутых выше колебаний при частотах f2 и f1. На выводе диода Шотки упомянутого резонатора присутствует в течение периода времени τ сигнал следующего далее типа:
где r (t) представляет сигнал, обусловленный эхо-сигналом, am (t) - величину, обусловленную локальным колебанием f1, и (A2•A1/2) = A.
Эта результирующая функция U(t) называется биением двух сигналов r(t) и m(t) и состоит из двух составляющих одинаковой амплитуды A; однако если f1≅ f2≡ 10GH, первая составляющая имеет частоту примерно 20 ГГц, которая не представляет интерес, и поэтому будет отфильтровываться, в противоположность этому вторая составляющая, имеющая много более низкую частоту, составляет один из трех полезных сигналов, получающихся из микроволновых отражений на препятствии. Фактически также остальные два резонатора образуют колебания частотой f1, как мы уже говорили, и также для них - в случае приема эхо-сигналов с частотой f2, что случается, если препятствие находится в секторе A + B или B + C - является действительным эффектом биений. В заключение, из измерения периода времени между мгновением, когда испускается короткое колебание частотой f2, и мгновением, когда колебание частотой fb возникает от одного из диодов Шотки, можно просто получить расстояние R между резонатором и препятствием, пользуясь уравнением R = c•t/2. Использование сигналов импульсного типа для передачи позволяет дискриминировать в глубину, имея в виду, что можно идентифицировать и отличать друг от друга последовательно несколько более дальних препятствий с разрешающей способностью, r, которая связывается с длительностью импульса τ уравнением: ┌ =c•τ/2. .
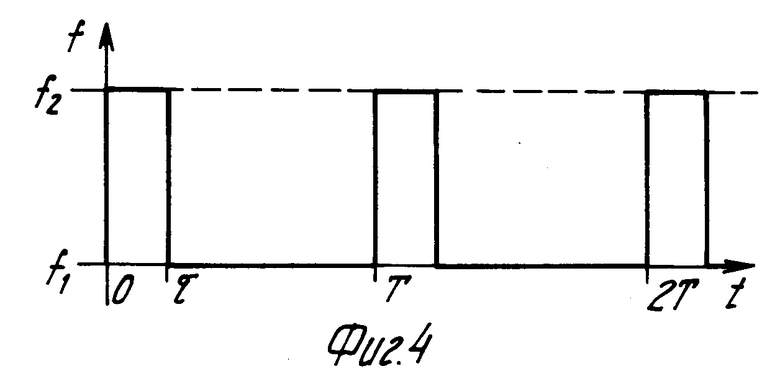
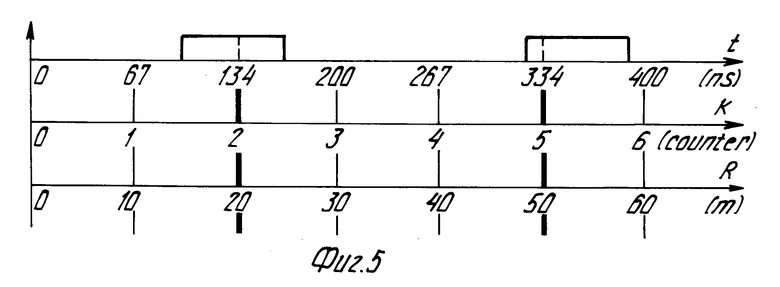
Максимальное расстояние /дальность действия/ Rmax, имеющее значение, чтобы обнаруживать препятствия, устанавливает частоту повторения импульсов (P. P. F), или хронирование /синхронизацию/ импульсов T(T=I/P.P.F), в соответствии с уравнением: Tmax = Rmax/с. Для того чтобы избегать невыгодных наложений эхо-сигналов /второй раз обернувшихся эхо-сигналов/, необходимо использовать величины T, по меньшей мере представляющие величину, равную удвоенной величине Tmax. Таким образом, предвидя для прототипа по настоящей заявке дальность действия Rmax = 100 м, выбирается величина T, равная 2 мкс. На фиг. 4 показаны взаимосвязи среди f1, f2, τ, T.
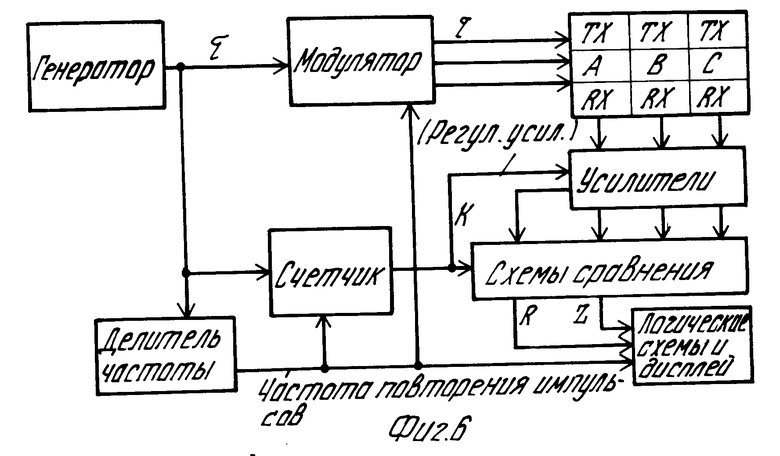
Выбранное подразделение Rmax на сегменты из 10 нс каждый является достаточным, чтобы распознавать зоны, свободные от препятствий на различных расстояниях (фиг. 1). Для того чтобы обеспечивать различимость среди препятствий при расстояниях обратной глубины /т.е. в направлении R/ порядка по меньшей мере 10 м, требуется разрешение по расстоянию r = 10 м, это означает, что следует работать с длительностью импульсов, которая не превышает τ = 67 нс. Поэтому имеются фиксированные интервалы порядка 67 нс, эквивалентные ходу волны порядка 20 м между источником и возвратом и мы можем сканировать их посредством счетчика. Благодаря величине интервала k полученной счетчиком от мгновения t = 0 волновой генерации при частоте f2, до мгновения, в которое эхо-сигнал детектируется соответствующими схемами сравнения /фиг. 6/, мы, таким образом, находимся в состоянии, чтобы оценивать квантованное расстояние R до препятствия. На фиг. 5 видим схематически индицированное присутствие двух препятствий на расстоянии 20 и 50 м. Зная, что интенсивность эхо-сигналов убывает, когда увеличивается расстояние до препятствия, пользуемся приемниками, коэффициенты усиления которых увеличиваются с расстоянием, т. е. с k. Таким образом, получаем первую ступень в направлении нормализации амплитуд эхо-сигналов; это является существенным для всех следующих далее схем. Блок-схема совокупности устройств, которая выполняет те функции, которые описаны выше, связанные с измерениями R и Z, показана на фиг. 6.
Генератор колебаний посылает прямоугольную волну/волну в виде меандра/ с периодом τ модулятору, счетчику и делителю частоты, от последнего является доступной частота повторения импульсов I/T, которая посылается счетчику, модулятору и совмещенным с дисплеем логическим схемам. Модулятор на основе двух принятых сигналов посылает в последовательности по одному за один раз импульс напряжения (τ) каждому резонатору A, B, C, выходные сигналы которых, полученные в зависимости от принятых эхо-сигналов, посылаются усилителями, которые принимают также сигнал регулирования коэффициента усиления от счетчика. Затем усиленные сигналы поступают в схемы сравнения, которые обеспечивают идентификацию углов Z и расстояний R, используя цифровой выходной сигнал счетчика. Три сигнала - повторения импульсов (P.R.F.), угла Z и расстояния R - собираются и уточняются соответствующими логическими схемами для окончательного представления на дисплее.
Важной характеристикой этой системы является то, что она должна давать результат, который не подвержен воздействию создаваемых автомобилями помех, поэтому для электромагнитных крайностей существенно, чтобы передаваемая форма сигнала не была амплитудно-модулированной /короткими импульсами/, а она должна быть частотно-модулированной. Поэтому цель состояла в том, чтобы применять частотно-импульсную модуляцию и получать таковую посредством объемных резонаторов, между тем как объемные резонаторы, как известно, являются предназначенными, чтобы приводиться в действие непрерывными волнами и нормально использоваться в средствах дальней связи или в доплеровских радиолокационных системах.
В заключение необходимо внести ясность в то, что функциональная схема является на практике полностью отличающейся от таковой существующих в настоящее время РЛС; фактически здесь не излучаются радиочастотные импульсы большой мощности (образованные клистронами, магнетронами и т.п.), чередуемые с периодами бездействия, в течение которых передатчик является выключенным, а эхо-сигналы внимательно прослеживаются; более того, для определения угла Z исключается необходимость применения саморегулирующейся антенны /которая могла бы быть громоздкой, слабой и неприглядной/ или антенны в виде фазированной решетки /очень дорогостоящей и малонаправленной/. Вместо этого предусмотрены отличающиеся новизной признаки, которые состоят в следующем:
/a/ передача непрерывных, но частотно-модулированных волн /короткими импульсами τ /, посредством использования более простых и более экономически выгодных устройств /объемных резонаторов/ с возможностью использования антенн с высоким усилением и остронаправленных антенн /рупорного типа или параболического типа/,
/b/ принятие технических приемов "амплитудной дискриминации", основанных на лучах, расходящихся и фиксированных, для определения угла Z. Поэтому данная система не является аналогичной моноимпульсной РЛС сопровождения с амплитудным сравнением, которая использует перекрывающиеся диаграммы направленности антенн, чтобы получить угловую ошибку. Эта система не представляет собой копию радиомаяка /радиоответчика/, т.к. настоящая система является полностью автономной и не требует приемоответчиков, установленных, например, на других транспортных средствах. Эта система также не представляет собой продолжение разработки радиовысотомера, основанного на эффекте Доплера, т.к. эффект Доплера здесь не используется; фактически нет необходимости делать только одно измерение, как расстояние самолет-земля, а должны выполнять столько много и отличных от других измерений, сколько препятствий в непрерывных движениях впереди водителя, включая измерение их углового положения Z, для получения полной фронтальной карты свободного пространства и занятого пространства, как это ясно показано на фиг. 1.
Понимается, что система в соответствии с этим изобретением может модифицироваться специалистами в данной области техники, чтобы приспосабливать ее к любому типу транспортного средства для применения на земле, в море или в воздухе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539914C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486538C2 |
| СПОСОБ СОЕДИНЕНИЯ КРАЕВ ВЯЗАНОГО ТРУБЧАТОГО ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085637C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486537C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
Радиолокационная система для предотвращения столкновения транспортных средств предназначена для обнаружения препятствия впереди находящегося в движении транспортного средства и обеспечения отображения информации об угловом положении и дальности препятствия впереди транспортного средства на экране дисплея, который может располагаться на приборном щитке. Пространство впереди транспортного средства облучается в секторах (A-G) совокупностью радиолокационных устройств на твердотельных элементах с непрерывным излучением, установленных в качестве антенной решетки поперек части транспортного средства так, что прилежащие лепестки диаграммы направленности каждого радиолокационного луча могут перекрываться. Радиолокационный сигнал непрерывного излучения, прямоугольный, модулированный, длительностью τ с периодом Т образует импульсы, которые, отражаясь от препятствия в пределах соответствующих секторов (A-G), детектируются смесительными диодами приемных каналов, включающих приемопередающие антенны параболического или рупорного типа, усилитель, блок сравнения и логический элемент, причем диод Ганна и диод Шотки подключены к соответствующей приемопередающей антенне. Расстояние до препятствия определяют по измеренной временной задержке. 6 з.п. ф-лы, 6 ил.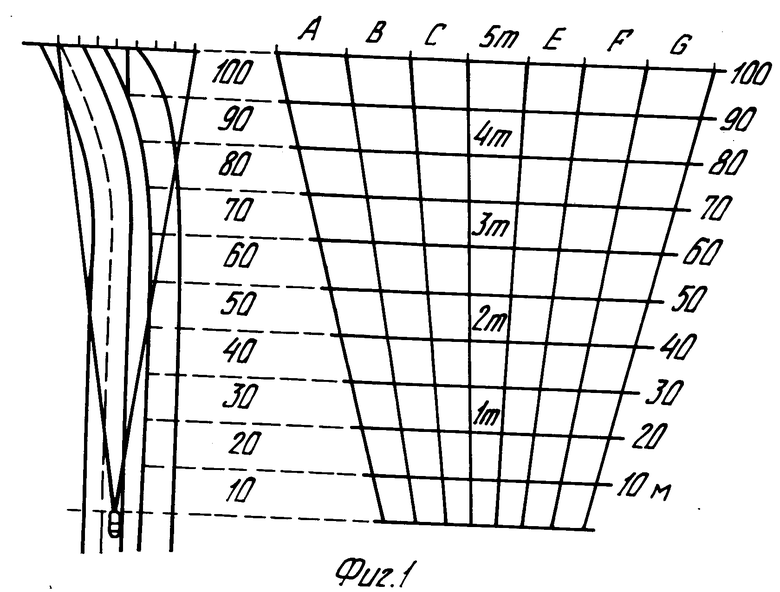
| US, патент, 4349823, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
