Изобретение относится к авиастроению в частности к управляемым летательным аппаратам (ЛА) - вертолетам, самолетам, крылатым ракетам.
Известны авиационные комплексы, обеспечивающие управление полетом и наведение ЛА по заданному (программному) параметру полета (Михалев И.А. и др. Системы автоматического управления самолетами, М.: Машиностроение, 1976, с. 255-253) а также принимаемый в качестве прототипа (3агайнов Г.И., Гуськов Ю. И. Управление полетом самолетов, М.: Машиностроение, 1980, с. 161) комплекс, содержащий блок формирования программного параметра движения(БФППД), блок управления (БУ), блок датчиков параметров движения (БДПД). На один и второй входы БУ поступают соответственно сигнал программного параметра xп с выхода БФППД, сигнал измеренного текущего параметра x с выхода БДПД. БУ через ЛА отрабатывает разность программного и измеренного текущего параметров (xп-x) и действующие возмущения f (например, порывы ветра) с учетом передаточной функции ЛА
где
T - постоянная времени, p - оператор дифференцирования,  - полиномы степеней α и β соответственно, β > α, ai, bi - близкие к постоянным коэффициенты.
- полиномы степеней α и β соответственно, β > α, ai, bi - близкие к постоянным коэффициенты.
В замкнутом контуре будет иметь место движение (полет) по текущему параметру при a = 1, r1 = 1, R1 = 1, N = 1
x(r + TRp) = xпr + TfR
Например, при r = 1, R = 1 + b1p + b2p2,
x(1 + Tp + b1Tp2 + b2Tp3) = xп + fT(1 + b1p + b2p2),
откуда следует, что при действии возмущений f = 10 м/с, T = 2 с имеет место погрешность Δx = 20 м; при заданном программном сигнале xп= Asinωt текущий параметр отрабатывается с изменением амплитуды
(здесь A - амплитуда, ω - частота, t - время) и искажением по фазе, что приводит к погрешностям при выполнении маловысотного полета с облетом рельефа местности, выполнении специальных программных пространственно-временных маневров. Техническим результатом, достигаемым при использовании предлагаемого решения, является обеспечение заданного качества управления и повышение точности наведения по программным траекториям при действии возмущений.
Достигаемый технический результат отличается тем, что в комплекс наведения и управления полетом летательных аппаратов, содержащий блок формирования программного параметра, блок управления, блок датчиков параметров движения, дополнительно введены первый блок формирования сигналов интерполяционного многочлена, формирующий сигнал, обеспечивающий точное наведение на сложные программные траектории, и второй блок формирования интерполяционного многочлена, формирующий сигнал, компенсирующий возмущающие воздействия, при этом первый и второй блоки формирования интерполяционного многочлена выполнены на К блоках запаздывания, суммирующем усилителе и блоке формирования коэффициентов.
На фиг. 1 представлена блок-схема предлагаемого комплекса, содержащего: 1 - блок формирования программного параметра движения БФППД; 2 - первый блок формирования сигналов интерполяционного многочлена БФИМ1; 3 - блок управления БУ; 4 - блок датчиков параметров движения БДПД; 5 - блок датчиков возмущающего воздействия БДВВ; 6 - второй блок формирования интерполяционного многочлена БФИМ2.
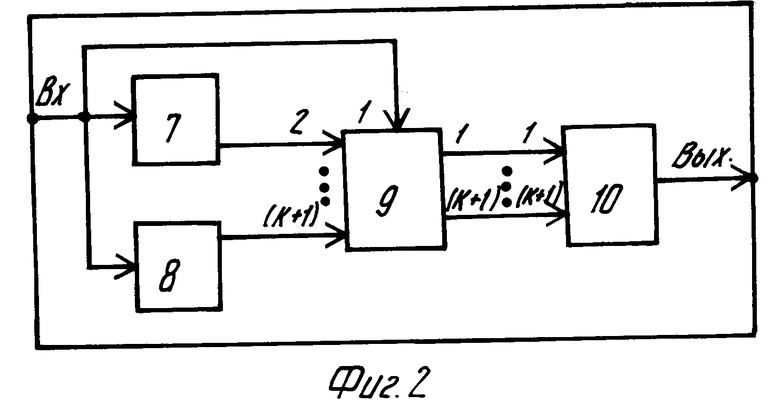
На фиг. 2 представлена блок-схема БФИМ1(2), содержащего: 7 - первый блок запаздывания Б31,...; 8 - блок запаздывания БЗК; 9 - блок формирования коэффициентов БФК; 10 - суммирующий усилитель СУ.
Комплекс наведения и управления полетом летательных аппаратов работает следующим образом.
В БФППД1 формируется сигнал программного параметра xп = xп(t), поступающий на вход БФИМ1(2). Сигнал xп может задаваться летчиком или оператором на наземных и воздушных пунктах командного управления при наведении на цели через бортовые средства связи, формироваться по данным бортовых систем навигации по рельефу местности, бортовых радиолокационных и оптиколокационных средств ([2], с. 165).
В БДПД 4 формируется сигнал измеренного текущего параметра x(t) (текущая высота полета, боковое отклонение). В БДВВ5 формируется сигнал измеренного возмущающего воздействия f(t) (например, порывы скорости ветра).
БДПД4 является комплексом навигационно-пилотажных датчиков, измеряющих параметры состояния летательного аппарата.
БДВВ5 является комплексом датчиков, измеряющих состояния воздушной среды (например, возмущающее воздействие ветра). Примеры технического выполнения БДПД4 и БДВВ5 приведены в книге (Помыкаев И.И. и др., Навигационные приборы и системы, М.: Машиностроение, 1983, с. 385-398).
С выхода БДПД4 сигнал измеренного текущего параметра поступает на первый вход БУЗ, на третий и второй входы которого поступают соответственно сигнал x1 с выхода БФИМ1(2) и сигнал x2 с выхода БФИМ2(6).
БУЗ является физически реализуемым линейным звеном с передаточной функцией  , где a - коэффициент усиления,
, где a - коэффициент усиления,
Пример технической реализации БУЗ приведен в книге (Тетельбаум И.М., Шнейдер Ю.Р., 400 схем для АВМ, М.: Энергия, 1978, с. 25).
Сигнал управления  с выхода БУЗ и действующие возмущения f отрабатываются ЛА в соответствии с уравнением движения (полета):
с выхода БУЗ и действующие возмущения f отрабатываются ЛА в соответствии с уравнением движения (полета):
где
T - постоянная времени.
При выборе коэффициентов ci = bi, di = ai, a = T/T1 будет R1 = R, r1 = r соответственно
xp = (x1 - x2 - x)•1/T1N + f, или
Выбором коэффициентов T
В БФИМ1(2) (фиг.2) входной сигнал xп(t) поступает на первый вход БФК9 и на входы Б31(7),..., БЗК (8), в которых формируются сигналы xп1= xп(t-τ1), ... , xпк= xп(t-τк), (здесь τ1, ...,τк - постоянные времени запаздывания) поступающие соответственно на второй,..... (K+1)-й входы БФК9.
При представлении xп(t) в виде многочлена
xп(t) = A0 + A1t + ... + Aktk
будут иметь место производные

соответственно в каждый момент времени t = 0
В БФК9 по поступившим сигналам xп(t),
xп1= xп(t-τп),...,xпк= xп(t-τк)
(здесь τ1,τ2,...,τк - постоянные времени запаздывания) формируются коэффициенты интерполяционного многочлена A0, A1, A2, ..., Ak, которые с первого, . ..., (K+1)-й входы СУ10, в котором при известных параметрах T
следовательно по сигналу наведения x1 текущий параметр отслеживает во времени программный параметр xп
Примеры технической реализации блоков СУ и БЗ приведены в книге (Тетельбаум И. М., Шнайдер Ю.Р., 400 схем для АВМ, М.: Энергия, 1978, с. 8, с. 49). Пример реализации БФК9 приведен (Бронштейн И.Н., Семендяев К.А., Справочник по математике, М.: Наука, 1986, с. 503).
Сигнал измеренного возмущения f(t) с выхода БДВВ5 поступает на вход БФИМ2(6), который по техническому исполнению аналогичен БФИМ1(2).
При представлении f(t) в виде многочлена
f(t) = B0 + B1t + ... + mBmtm
будут иметь место производные
соответственно в каждый момент времени t = 0
На выходе БФИМ2(6) при известных величинах T1, li в каждый момент времени формируется сигнал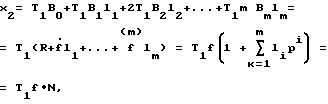
откуда следует, что сигнал x2 = T1fN компенсирует влияние возмущений fT1N, в итоге после обработки начальных условий текущий параметр x(t) = xп•(t), т. е. x(t) точно отслеживает программный параметр xп(t), что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГРУППОВОГО ВОЖДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1997 |
|
RU2123171C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2120885C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ВЕРТОЛЕТА ВСЕПОГОДНОГО И КРУГЛОСУТОЧНОГО ПРИМЕНЕНИЯ | 1997 |
|
RU2119646C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ВОЗДУШНОГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2102713C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТЕЙ И ЛОНЖЕРОНОВ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ДРУГИХ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1996 |
|
RU2115594C1 |
| ГИБКИЙ ТРУБОПРОВОД | 1995 |
|
RU2097643C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПРИБОРНОГО ОБОРУДОВАНИЯ И ТРАНСПАРАНТОВ СВЕТОВОЙ СИГНАЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НАБЛЮДЕНИИ ИХ ЧЕРЕЗ ПИЛОТАЖНЫЕ ОЧКИ НОЧНОГО ВИДЕНИЯ | 1998 |
|
RU2133973C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ДЛИННОМЕРНЫХ ПОЛЫХ КОНСТРУКЦИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ, НАПРИМЕР ЛОНЖЕРОНА ЛОПАСТИ ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2084853C1 |
| НАРУЖНАЯ ГРУЗОВАЯ ПОДВЕСКА | 1995 |
|
RU2091273C1 |
Комплекс наведения и управления полетом летательных аппаратов содержит блок управления, блок формирования программного параметра движения, блок датчиков параметров движения, блок датчиков возмущающего воздействия, два блока формирования интерполяционного многочлена, которые выполнены на блоках запаздывания, блоке формирования коэффициентов и суммирующем усилителе. Комплекс обеспечивает отработку начальных условий с заданным качеством управления и точное выполнение полета по пространственно-временным траекториям при возмущающих воздействиях 1 з.п.ф-лы, 2 ил.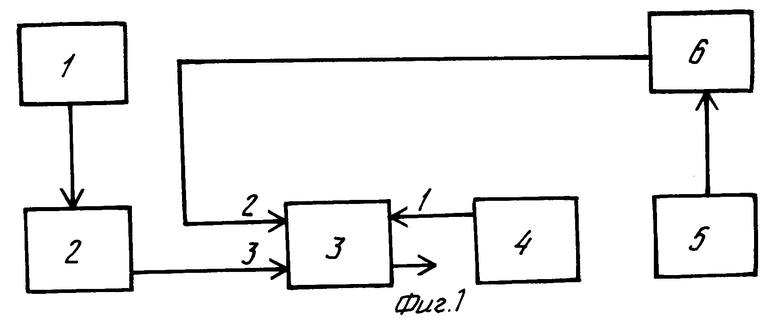
| Загайнов Г.И., Гуськов Ю.И | |||
| Управление полетом самолетов | |||
| - М.: Машиностроение, 1980, с.161. |
