Изобретение относится к области авиастроения, в частности к комплексам бортового оборудования, обеспечивающего навигацию, выполнение прицельных задач и пуска средств поражения, индикацию и управление летательных аппаратов, особенно вертолетов и самолетов фронтового назначения.
Из известных аналогов наиболее близким по технической сущности является выбираемый в качестве прототипа комплекс бортового оборудования, описание которого приведено в книге [1] Гришутина А.Г. Лекции по авиационным прицельным системам стрельбы.- Киев: КВВАИУ, 1980 г., стр. 355-385. Данный комплекс содержит навигационную систему, прицельную систему, устройство коррекции параметров движения, систему управления средствами поражения, систему индикации и систему задания исходных данных.
Навигационные параметры, измеряемые навигационной системой с погрешностями, являющимися медленно меняющимися процессами (см. книгу [2] Помыкаева И. И. Навигационные приборы и системы.- М.: Машиностроение, 1983 г. стр. 323-343). В зависимости от типов корректирующих средств погрешности навигационной системы по курсу составляют 0,5-3o, а погрешности по координатам местоположения находятся в пределах от нескольких десятков метров до нескольких километров.
Прицельные параметры, например, координаты летательного аппарата относительно цели, измеряются прицельной системой с погрешностями, являющимися обычно флюктуационными быстро меняющимися центрированными процессами; в зависимости от типов локационных средств (см. книгу [3] Малашина М.С. и др. Основы проектирования лазерных локационных систем.- М.: Высшая школа, 1983 г. стр. 129) погрешности относительных координат могут находиться в пределах от единиц метров до нескольких десятков метров. Наличие вышеуказанных погрешностей является недостатком прототипа.
Технический результат, достигаемый при использовании предлагаемого технического решения, - повышение точности работы комплекса и как следствие этого повышение эффективности применения летательных аппаратов.
Достигается этот результат тем, что в состав комплекса бортового оборудования, содержащего взаимосвязанные навигационную систему, устройство коррекции параметров движения, прицельную систему, систему задания исходных данных, систему управления летательным аппаратом, систему индикации, систему управления средствами поражения, дополнительно введено устройство формирования параметров движения, формирующее параметры движения и функции их погрешностей для оптимальной коррекции в устройстве коррекции параметров движения, на основе параметров, измеряемых навигационной и прицельной системами в режимах одновременной локации наземных неподвижных целей с известными координатами, при этом устройство формирования параметров движения содержит блок ввода-вывода, блок преобразования координат, блок разности, блок деления, блок умножения, блок формирования арктангенса и блок суммирования, причем первый и второй входы устройства формирования параметров движения являются соответственно первым и вторым входами блока ввода-вывода, на третий - седьмой входы которого подключены соответственно первый выход блока деления, выход блока суммирования, первый, второй и третий выходы блока умножения; выходом устройства формирования параметров движения является первый выход блока ввода-вывода, второй - седьмой выходы которого подключены соответственно к первому входу блока деления, первому - пятому входам блока преобразования координат, третий выход блока ввода-вывода подключен также ко второму входу блока деления, на третий вход которого подключен первый выход блока преобразования координат, второй - девятый выходы которого подключены соответственно к первому - восьмому входам блока разности, первый и второй выходы которого подключены соответственно к четвертому и пятому входам блока деления, четвертый выход блока ввода-вывода подключен также к первому входу блока умножения, на второй, третий и четвертый входы которого подключены соответственно третий и четвертый выходы блока разности и второй выход блока деления, третий выход которого подключен ко входу блока формирования арктангенса, выход которого подключен к первому входу блока суммирования, на второй вход которого подключен седьмой выход блока ввода-вывода.
На фиг. 1 представлена блок-схема предлагаемого комплекса бортового оборудования, содержащего: 1 - навигационная система НС, 2 - система задания исходных данных СИД, 3 - прицельная система ПС, 4 - система управления летательным аппаратом СУЛА, 5 - система индикации СИ, 6 - система управления средствами поражения СУСП, 7 - устройство формирования параметров движения УФПД, 8 - устройство коррекции параметров движения УКПД.
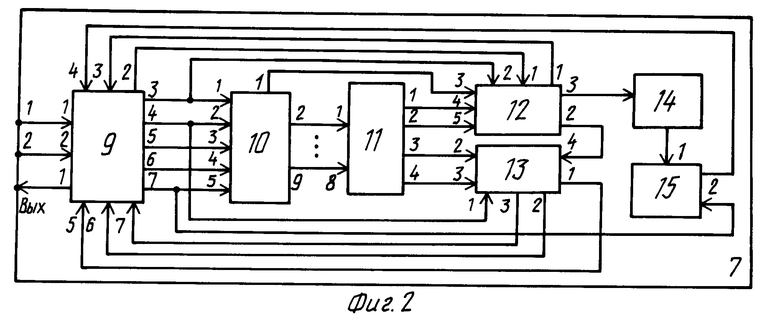
На фиг. 2 представлена блок-схема УФПД7, содержащего 9 - блок ввода-вывода БВВ, 10 - блок преобразования координат БПК, 11 - блок разности БР, 12 - блок деления БД, 13 - блок умножения БУ, 14 - блок формирования арктангенса БФА, 15 - блок суммирования БС.
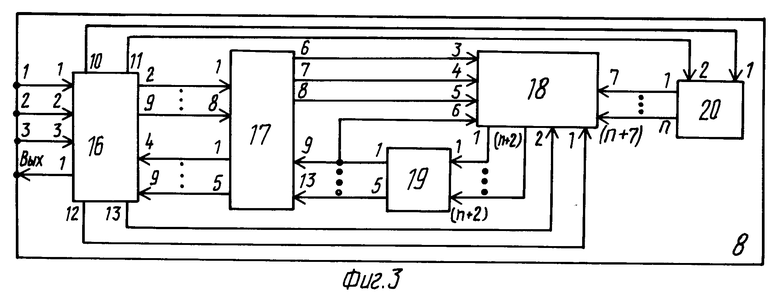
На фиг. 3 представлена блок-схема УКПД8 содержащего 16 - блок ввода-вывода БВВ, 17 - блок разности БР, 18 - блок умножения БУ, 19 - блок суммирующих интеграторов БСИ, 20 - блок формирования коэффициентов коррекции БФКК.
Связи комплекса выполнены по однопроводным линиям, например, последовательного кода или мультиплексного информационного обмена.
Комплекс работает следующим образом.
С выхода СИД2 поступают юстировочные характеристики и исходные данные для всех систем - координаты целей и ориентиров для НС1 и ПС3, баллистические характеристики средств поражения для ПС3, номенклатура и количество средств поражения для СУСП6, балансировочные характеристики и величины ограничений сигналов управления для СУЛА4.
Примеры технического исполнения СИД2 приведены, например, в книге [4] Джанджгавы Г.И. и др. Основы навигации по географическим полям.- М.: Наука, 1985 г. Выход СИД2 подключен к первым входам НС1, ПС3, СУЛА4, СУСП6, УФПД7, УКПД8.
В НС1 формируются навигационные параметры: координаты местоположения, углы и составляющие скорости движения летательного аппарата с учетом данных, поступивших по первому входу с СИД2 и по второму входу с ПС3. С выхода НС1 навигационные данные поступают на вторые входы ПС3, СУЛА4, СИ5, УКПД8. Примеры технического выполнения НС1 приведены в [2].
В ПС3 с учетом данных, поступивших по первому входу с выхода СИД2 и по второму входу с выхода НС1, формируются прицельные параметры - полярные и прямоугольные координаты целей и ориентиров относительно летательного аппарата, разовые команды на подготовку и пуск средств поражения, заданные сигналы управления летательным аппаратом, которые с выхода ПС 3 поступают на вторые входы СУСП6, УФПД7, НС2 и на третьи входы СУЛА4, СИ5. Примеры технического выполнения ПС3 приведены в [1].
В СУЛА4 по заданным сигналам, поступившим на первый, второй и третий входы, формируются сигналы автоматического управления и сигналы индикации экипажу для осуществления ручного, полуавтоматического и автоматического управления летательным аппаратом, которые с выхода СУЛА4 поступают на первый вход СИ5 и на органы управления летательного аппарата.
Примеры технического выполнения СУЛА4 приведены, например, в книге [5] Боднера В.А. Теория автоматического управления полетом.- М.: Наука, 1964 г.
В СУСП6 по сигналам, поступившим на первый и второй входы формируются сигналы индикации экипажу по командам для ручного пуска средств поражения, которые с выхода СУСП6 поступают на четвертый вход СИ5 и на входы средств поражения для обеспечения их подготовки и автоматического пуска.
Примеры технического выполнения СУСП6 приведены в [1].
В СИ5 по сигналам, поступившим на первый, второй, третий и четвертый входы, осуществляется индикация навигационных, пилотажных, прицельных данных для осуществления экипажем навигации, управления, пуска средств поражения. Примеры технического выполнения СИ 5 приведены в книге [6] Костюка В.И. Системы отображения информации и инженерная психология.- Киев: Вища школа, 1977 г.
При фиксации посредством ПС3 двух наземных неподвижных целей (одна из них может быть ориентиром) с известными (запрограммированными) координатами, введенными перед полетом или в полете в СИД2, полярные координаты этих целей D1, D2, ϕ1, ϕ2 (здесь Di - дальность, ϕi - угол визирования цели) с выхода ПС3 поступают на второй вход УФПД7, на первый вход которого с выхода СИД2 поступают сигналы S - расстояние между целями, ϕ - угол между линией, соединяющей точки целей, и параллелью (в земной географической системе координат).
При малой высоте полета в горизонтальной плоскости определяются угол текущего курса ψп и координаты местоположения летательного аппарата относительно первой цели xоп, Yоп: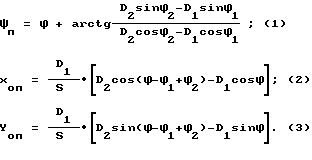
При этом погрешности, определяемые погрешностями измерений Di, ϕi, имеют вид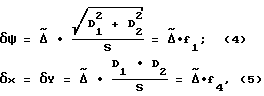
здесь центрированная флюктуационная погрешность, близкая к белому шуму.
центрированная флюктуационная погрешность, близкая к белому шуму.
В КФПД (см. фиг. 2) первый и второй входы подключен к первому и второму входам БВВ9, осуществляющего выборку параметров D1, D2, ϕ1, ϕ2, S, ϕ. Со второго выхода БВВ9 сигнал S поступает на первый вход БД12. С третьего - седьмого выходов БВВ9 сигналы D1, D2, ϕ1, ϕ2, ϕ поступают соответственно на первый - пятый входы БПК10, при этом третий выход БВВ9 подключен ко второму входу БД12, четвертый выход БВВ9 подключен к первому входу БУ13, а седьмой выход БВВ9 подключен ко второму входу БС15.
БПК10 является преобразователем координат.
На первом выходе БПК10 формируется сигнал  поступающий на третий вход БД12.
поступающий на третий вход БД12.
На втором - девятом выходах БПК10 формируются сигналы
поступающие на первый - восьмой входы БР11, выполненного на четырех элементах разности, на которых формируются сигналы:
F1 = D2sinϕ2 - D1sinϕ1;
F2 = D2cosϕ2 - D1cosϕ1;
F3 = D2cos(ϕ-ϕ1+ϕ2) - D1cosϕ;
F4 = D2sin(ϕ-ϕ1+ϕ2) - D1sinϕ.
Сигналы F1 и F2 с первого и второго выходов БР11 поступают соответственно на четвертый и пятый входы БД12. Сигналы F3 и F4 с третьего и четвертого выходов БР11 поступают соответственно на второй и третий входы БУ13. БД12 выполнен на трех элементах деления, на которых формируются сигналы 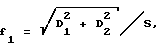 f2= F1/F2, f3=D1/S. Реализующей зависимости (4) сигнал f1 с первого выхода БД12 поступает на третий вход БВВ9. Сигнал f2 с третьего выхода БД12 поступает на вход БФА14, где формируется сигнал arctgf2, который с выхода БФА14 поступает на первый вход БС15, где формируется реализующий зависимость (1) сигнал географического курса ψп = ϕ + arctgf2, который с выхода БС15, поступает на четвертый вход БВВ9. Сигнал f3 со второго выхода БД12 поступает на четвертый вход БУ13, выполненного на трех элементах умножения, на которых формируются реализующие зависимости (2), (3), (5), сигналы xоп= f3•F3; Yоп=f3•F4; f4=f3•D2, которые с первого, второго и третьего выходов БУ13 поступают соответственно на пятый, шестой и седьмой входы БВВ9, с первого выхода (последовательный код) которого сигналы ψп, xоп, Yоп, f1, f4 поступают через выход УФПД7 на третий вход УКПД8, на первый и второй входы которого подключены выходы СИД2 и НС1 соответственно.
f2= F1/F2, f3=D1/S. Реализующей зависимости (4) сигнал f1 с первого выхода БД12 поступает на третий вход БВВ9. Сигнал f2 с третьего выхода БД12 поступает на вход БФА14, где формируется сигнал arctgf2, который с выхода БФА14 поступает на первый вход БС15, где формируется реализующий зависимость (1) сигнал географического курса ψп = ϕ + arctgf2, который с выхода БС15, поступает на четвертый вход БВВ9. Сигнал f3 со второго выхода БД12 поступает на четвертый вход БУ13, выполненного на трех элементах умножения, на которых формируются реализующие зависимости (2), (3), (5), сигналы xоп= f3•F3; Yоп=f3•F4; f4=f3•D2, которые с первого, второго и третьего выходов БУ13 поступают соответственно на пятый, шестой и седьмой входы БВВ9, с первого выхода (последовательный код) которого сигналы ψп, xоп, Yоп, f1, f4 поступают через выход УФПД7 на третий вход УКПД8, на первый и второй входы которого подключены выходы СИД2 и НС1 соответственно.
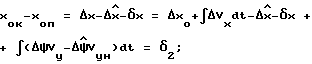
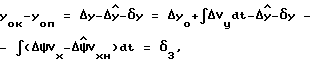
В УКПД8 первый, второй и третий входы подключены соответственно к первому, второму и третьему входам БВВ16, осуществляющего выборку параметров ψп, xоп, Yоп, f1, f4, поступивших по третьему входу; параметров ψн, xсн, Yсн, vxн, vyн, поступивших по второму входу; параметров x01, y01, поступивших по первому входу.
Здесь ψн = ψ + Δψ - географический курс, измеренный НС1, ψ - действительное значение курса, Δψ - медленно меняющая погрешность; xсн = xс + Δx, Yсн = Yc + ΔY - координаты местоположения летательного аппарата определяемые НС1,  Δy - медленно меняющиеся погрешности; Vхн = Vх+ΔVх+Δψ•Vу; Vун = Vу+ΔVу-Δψ•Vx - составляющие путевой скорости, измеренные НС1, ΔVх, ΔVу - медленно меняющиеся погрешности, x01, y01 - координаты первой цели, xc, yc - действительные координаты местоположения летательного аппарата.
Δy - медленно меняющиеся погрешности; Vхн = Vх+ΔVх+Δψ•Vу; Vун = Vу+ΔVу-Δψ•Vx - составляющие путевой скорости, измеренные НС1, ΔVх, ΔVу - медленно меняющиеся погрешности, x01, y01 - координаты первой цели, xc, yc - действительные координаты местоположения летательного аппарата.
В БВВ16 параметры ψп, xоп, yоп, ψн, xсн, yсн, x01, y01 со второго - девятого выходов БВВ16 поступают на первый - восьмой входы БП17. С десятого и одиннадцатого выходов БВВ16 сигналы f1, f4 поступают соответственно на первый и второй входы БФКК20. С двенадцатого и тринадцатого выходов БВВ16 сигналы vxн, vyн поступают на первый и второй входы БУ18.
В БСИ19 формируются сигналы оценок погрешностей  и корректирующие сигналы
и корректирующие сигналы 
 которые с первого - пятого выходов БСИ19 поступают на девятый - тринадцатый входы БР17.
которые с первого - пятого выходов БСИ19 поступают на девятый - тринадцатый входы БР17.
БР17 выполнен на восьми элементах разности, на которых формируются откорректированные сигналы 
 x0k=xck-x01; y0k=yck-y01, поступающие на первый - пятый выходы БР17 и сигналы
x0k=xck-x01; y0k=yck-y01, поступающие на первый - пятый выходы БР17 и сигналы
(здесь Δxo, Δyo - погрешности координаты местоположения в начале коррекции), поступающие на шестой, седьмой и восьмой выходы БР17, подключенные к третьему, четвертому и пятому входам БУ18, на шестой вход которого поступает сигнал  с первого выхода БСИ19.
с первого выхода БСИ19.
Если 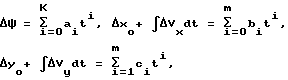 (здесь ai=const, bi=const, ci= const, t - время),
(здесь ai=const, bi=const, ci= const, t - время),  в БФКК20 по известным зависимостям (см. книгу [7] Сейджа 3. Теория оценивания и ее применение в связи с управлении. - М.: Связь, 1976 г., стр. 288) формируются коэффициенты коррекции
в БФКК20 по известным зависимостям (см. книгу [7] Сейджа 3. Теория оценивания и ее применение в связи с управлении. - М.: Связь, 1976 г., стр. 288) формируются коэффициенты коррекции  Kx0(f4),...,Kxm(f4), Ky0(f4),...,Kym(f4), которые с первого - n-го выходов (здесь n= k+2m+3) БФКК20 поступают на седьмой - (n+7)-й входы БУ18. БУ18 выполнен на (n+2)-х элементах умножения, на которых реализуются сигналы
Kx0(f4),...,Kxm(f4), Ky0(f4),...,Kym(f4), которые с первого - n-го выходов (здесь n= k+2m+3) БФКК20 поступают на седьмой - (n+7)-й входы БУ18. БУ18 выполнен на (n+2)-х элементах умножения, на которых реализуются сигналы
которые с первого - (n+2)-го выходов БУ18 поступают на первый - (n+2)-й входы БСИ19.
БСИ19 выполнен на (n+2)-х суммирующих интеграторах, на которых формируются сигналы оценок погрешностей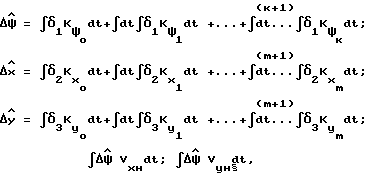
которые с первого - пятого выходов БСИ19 поступают на девятый - тринадцатый входы БР17, в котором формируются откорректированные сигналы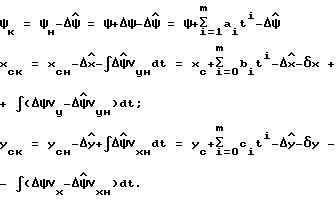
Например, при  σ2 - спектральная плотность сигнала
σ2 - спектральная плотность сигнала  типа белого шума,
типа белого шума, 
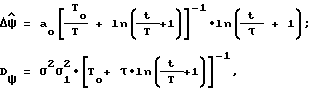
(здесь
Dψ - дисперсия сигнала оценки, 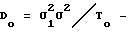 начальное значение дисперсии), отсюда следует, что с течением времени
начальное значение дисперсии), отсюда следует, что с течением времени  т. е. откорректированное значение географического курса стремится к действительному значению, а флюктуационная погрешность стремится к нулю. Соответственно с точностью до величин второго порядка малости после компенсации погрешности по курсу
т. е. откорректированное значение географического курса стремится к действительному значению, а флюктуационная погрешность стремится к нулю. Соответственно с точностью до величин второго порядка малости после компенсации погрешности по курсу 
x0к=xcк-x01; y0к=ycк-y01, тогда, например, при b0=const, c0=const, b1=.. . = bm= 0, c1= . ..=cm=0,  будут иметь место оценки при
будут иметь место оценки при  Dx0=Dy0
Dx0=Dy0
Откуда следует, что  соответственно xcк ---> xc, ycк ---> yc, xoк ---> xc-x01, yoк ---> yc-y01, т.е. откорректированные значения координат местоположения летательного аппарата стремятся к действительным значениям. Сигналы ψк, x0к, ycк, x0к, yoк с первого - пятого выходов БР17 поступают на четвертый - девятый входы БВВ16, с первого выхода которого эти сигналы, например в последовательном коде поступают на выход БВВ16.
соответственно xcк ---> xc, ycк ---> yc, xoк ---> xc-x01, yoк ---> yc-y01, т.е. откорректированные значения координат местоположения летательного аппарата стремятся к действительным значениям. Сигналы ψк, x0к, ycк, x0к, yoк с первого - пятого выходов БР17 поступают на четвертый - девятый входы БВВ16, с первого выхода которого эти сигналы, например в последовательном коде поступают на выход БВВ16.
Примеры технической реализации блоков БР, БД, БУ, БФА, БС, БСИ, БПК приведены в книге [8] Тетельбаума И.М. 400 схем для АВМ.- М.: Энергия 1978 г. , пример реализации БФКК приведен в [7] на стр. 288, примеры технической реализации БВВ приведены в книге [9] Преснухина Л.Н. "Цифровые вычислительные машины", Москва, Высшая школа, 1981, стр. 394-406. Блоки УФПД7 и УКПД8 могут быть реализованы в вычислительных модулях бортовых вычислительных машин, [10] "Бортовая цифровая вычислительная машина БЦВМ-386", Регламент по эксплуатации, г. Раменское, Московской области, АО РПКБ, 1995 г. С выхода УКПД8 сигналы откорректированных параметров поступают на третий вход НС1, и на третий вход ПС3.
В НС1 откорректированные сигналы ψк, x0к, ycк, обеспечивают повышение точности самолетовождения и, соответственно, управления и индикации; в ПС3 откорректированные сигналы x0к, y0к обеспечивают повышение точности решения прицельных задач и соответственно управления, индикации и пуска средств поражения.
Таким образом, на примерах реализации показано достижение технического результата - повышение точности работы комплекса бортового оборудования при решении задач навигации, управления, индикации, задач прицельного пуска средств поражения и как следствие этого повышение эффективности применения летательных аппаратов, особенно вертолетов и самолетов фронтового назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС НАВЕДЕНИЯ И УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2112268C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ВЕРТОЛЕТА ВСЕПОГОДНОГО И КРУГЛОСУТОЧНОГО ПРИМЕНЕНИЯ | 1997 |
|
RU2119646C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ВОЗДУШНОГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2102713C1 |
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПРИБОРНОГО ОБОРУДОВАНИЯ И ТРАНСПАРАНТОВ СВЕТОВОЙ СИГНАЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НАБЛЮДЕНИИ ИХ ЧЕРЕЗ ПИЛОТАЖНЫЕ ОЧКИ НОЧНОГО ВИДЕНИЯ | 1998 |
|
RU2133973C1 |
| СИСТЕМА ГРУППОВОГО ВОЖДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1997 |
|
RU2123171C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТЕЙ И ЛОНЖЕРОНОВ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ДРУГИХ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1996 |
|
RU2115594C1 |
| ГИБКИЙ ТРУБОПРОВОД | 1995 |
|
RU2097643C1 |
| КОМПЛЕКС ГРУППОВОГО БОЕВОГО ВЗАИМОДЕЙСТВИЯ ВЕРТОЛЕТОВ АВИАЦИИ СУХОПУТНЫХ ВОЙСК | 1998 |
|
RU2141625C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
Используется в пилотируемых летательных аппаратах - вертолетах и самолетах фронтовой авиации. Комплекс бортового оборудования содержит взаимосвязанные навигационную систему, систему задания исходных данных, прицельную систему, систему управления летательным аппаратом, систему управления средствами поражения, систему индикации, устройство коррекции параметров движения, устройство формирования параметров движения, формирующее в режиме локации наземных неподвижных целей информационные сигналы режима оптимальной коррекции навигационных и прицельных параметров, и обеспечивает повышение точности навигации, управления и индикации, повышение точности применения средств поражения и, как следствие этого, повышение боевой эффективности оборудованных предлагаемым комплексом бортового оборудования, летательных аппаратов, особенно вертолетов и самолетов фронтового назначения. 3 ил.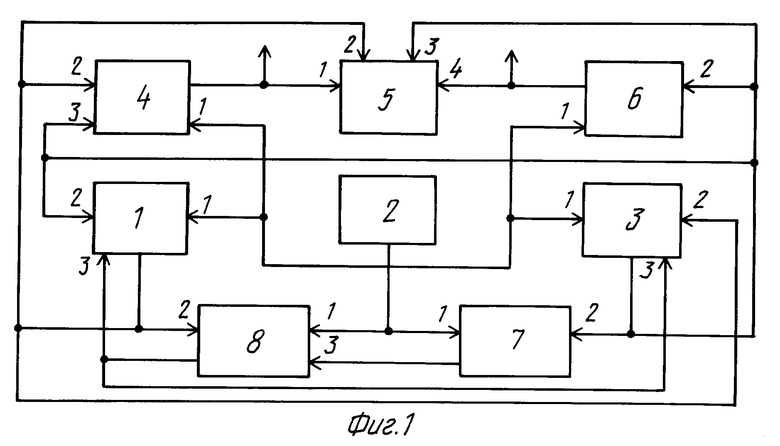
Комплекс бортового оборудования летательного аппарата, содержащий навигационную систему, систему задания исходных данных, прицельную систему, систему управления летательным аппаратом, систему индикации, систему управления средствами поражения и устройство коррекции параметров движения, при этом выход системы задания исходных данных подключен к первым входам навигационной системы, прицельной системы, систему управления летательным аппаратом, системы управления средствами поражения, устройства коррекции параметров движения, выход навигационной системы подключен к вторым входам прицельной системы, системы управления летательным аппаратом, системы индикации, устройства коррекции параметров движения, выход прицельной системы подключен к вторым входам навигационной системы и системы управления средствами поражения и к третьим входам системы управления летательным аппаратом и системы индикации, на четвертый вход которой подключен выход системы управления средствами поражения, выход устройства коррекции параметров движения подключен к третьим входам навигационной системы и прицельной системы, отличающийся тем, что в него дополнительно введено подключенное выходом к третьему входу устройства коррекции параметров движения устройство формирования параметров движения, на первый и второй входы которого подключены соответственно выходы системы задания исходных данных и прицельной системы, при этом
устройство формирования параметров движения содержит блок ввода-вывода, блок преобразования координат, блок разности, блок деления, блок умножения, блок формирования арктангенса и блок суммирования, причем первый и второй входы устройства формирования параметров движения являются соответственно первым и вторым входами блока ввода-вывода, на третий - седьмой входы которого подключены соответственно первый выход блока деления, выход блока суммирования, первый, второй и третий выходы блока умножения, выходом устройства формирования параметров движения является первый выход блока ввода-вывода, второй - седьмой выходы которого подключены соответственно к первому входу блока деления, первому - пятому входам блока преобразования координат, третий выход блока ввода-вывода подключен также к второму входу блока деления, на третий вход которого подключен первый выход блока преобразования координат, второй - девятый выходы которого подключены соответственно к первому - восьмому входам блока разности, первый и второй выходы которого подключены соответственно к четвертому и пятому входам блока деления, четвертый выход блока ввода-вывода подключен также к первому входу блока умножения, на второй, третий и четвертый входы которого подключены соответственно третий и четвертый выходы блока разности и второй выход блока деления, третий выход которого подключен к входу блока формирования арктангенса, выход которого подключен к первому входу блока суммирования, на второй вход которого подключен седьмой выход блока ввода-вывода.
| Грищутин В.Г | |||
| Лекции по авиационным прицельным системам стрельбы | |||
| - Киев: КВВАИУ, 1980, с | |||
| Приспособление для увеличения сцепной силы тяги паровозов и других повозок | 1919 |
|
SU355A1 |
| Селезнев В.П | |||
| Навигационные устройства | |||
| - М.: Машиностроение, 1974, р | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Джанджгава Г.И | |||
| и др | |||
| Основы навигации по географическим полям | |||
| - М.: Наука, 1985, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
