Изобретение относится к радиоэлектронике, в частности к устройствам компенсации наводимых помех по постоянному току.
Для измерения электрических характеристик подводного кабеля на постоянном токе, находящегося в тенксах кабельных судов, применяют измерительные стрелочные приборы. Подводный кабель на кабельном судне укладывается в тенксах по окружности и называется океанским блоком. Для измерения электрических характеристик кабеля в измерительную комнату выводятся концы подводного кабеля из тенксов кабельного судна, которые и подключаются к измерительным приборам.
При качке судна от силовых линий магнитного поля земли в океанском блоке наводится электродвижущая сила, которая в виде помехи поступает на измерительный прибор и вносит погрешность в его показания.
Известно устройство для компенсации помех в линиях связи [1], которое включает в себя компенсационный провод, усилитель, входы которого подключены к концам резистора, один из выходов усилителя заземлен, а другой подсоединен к компенсационному проводу.
Недостатком устройства-прототипа является то, что он не исключает влияния наводимой электродвижущей силы от магнитного поля земли в океанском блоке подводного кабеля.
Целью изобретения является исключение влияния наводимой электродвижущей силы от земного магнетизма в океанском блоке подводного кабеля.
Поставленная цель достигается тем, что в устройство для компенсации помех, содержащее усилитель, выход которого соединен с компенсационным проводом, дополнительно введена компенсационная катушка индуктивности, соединенная с входом усилителя, а усилитель выполнен в виде регулируемого усилителя постоянного тока, причем компенсационная катушка индуктивности жестко соединена с корпусом судна и размещена в поле постоянного магнита, который установлен на прижимающих пружинных растяжках внутри камеры с незамерзающей жидкостью, например этиленгликолем, причем произведение объема вытесненного постоянного магнита на удельный вес незамерзающей жидкости выбрано равным в точности весу постоянного магнита, при этом передняя часть постоянного магнита соединена с отверстием в камере с помощью сопряженных элементов шаровых поверхностей с зазором между ними, заполненным гермосмазкой, при этом введен блок стабилизации постоянного магнита в пространстве, содержащий гидроскопические датчики положения судна относительно истинного горизонта по курсу M и по траверзу N движения судна, выходы которого подключены к первым входам соответственно косинусного и синусного умножителей, причем к вторым входам этих умножителей подключен датчик угла, образуемого продольно осью судна и направлением на ось магнитного поля земли, а выходы этих умножителей через идентичные усилители тока подключены к исполнительным электромагнитам, которые вытягивают вертикальный и горизонтальный сердечники, подпружинены идентичными пружинами и подвижно соединены с регулировочным рычагом, который выполнен из двух подпружиненных частей с возможностью перемещения их относительно друг друга по продольной оси рычага, для чего первая часть рычага выполнена полой, а вторая часть включает в себя шток, установленный в этой полости, причем обе упомянутые части регулировочного рычага подпружинены цилиндрической пружиной, которая установлена на штоке между торцевыми частями подвижных частей регулировочного рычага, причем первая часть рычага при проходе стенки камеры, вторая часть рычага в соединении с ответной полусферой, которая жестко соединена по продольной оси постоянного магнита с его камерой.
На фиг. 1 представлена функциональная схема работы устройства. Устройство состоит из океанского блока 1, в котором находится подводный кабель 2, уложенный по окружности кабельного тенкса, компенсационной катушки индуктивности 3, помещенный в поле постоянного магнита 5, подвешенного на гироскопическом подвесе 6, второй конец катушки индуктивности соединен с регулируемым усилителем постоянного тока 7, один конец которого подключен к измерительной схеме 8, а второй - к подводному кабелю 2.
Постоянный магнит 5 находится в невесомости и требует для регулировки своего положения в пространстве минимальных усилий. При этом благодаря сочетанию трех шаровых опор, эти усилия возможно передавать независимо в вертикальной и горизонтальной плоскости. Частотный диапазон регулировок расширен существенно вправо по оси частот, что позволяет отслеживать кратковременные (импульсного типа) элементы качки судна как по корме, так и по борту. Это является важным при установке постоянного магнита на малых кабельных судах типа "Эмба", а также на больших судах типа "Ингул".
На фиг. 2 представлена блок-схема подвески постоянного магнита.
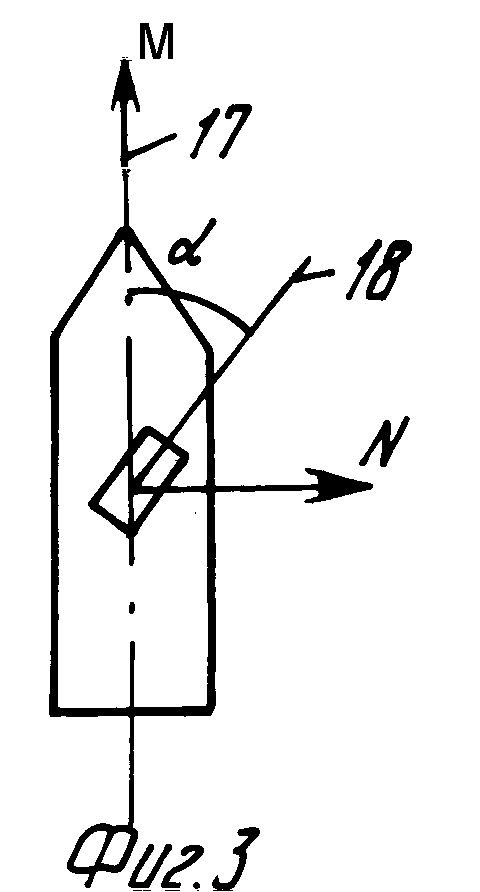
На фиг. 3 пояснены введенные обозначения: направление кормовой качки N, направление бортовой качки M.
На фиг. 4 показано устройство регулировочного рычага с сочленениями.
Постоянный магнит 5 размещен на пружиненных растяжках 9 внутри камеры 10 с незамерзающей жидкостью 11, например этиленгликолем. При этом постоянный магнит 5 имеет нейтральную плавучесть в жидкости 11.
Для работы блока стабилизации служат датчики 12 кормовой качки и датчик 13 бортовой качки. Выходы датчиков 12 и 13 подключены к первым входам соответственно косинусного 14 и синусного 15 умножителей, причем к вторым входам умножителей подключены датчики угла 16, образуемого продольной осью кабельного судна 17 и направлением на ось магнитного поля Земли 18 (фиг. 3).
Выходы умножителей 14 и 15 через идентичные усилители тока 19 и 20 подключены к исполнительным покомпонентным электромагнитам 21 и 22, втягивающие вертикальный 23 и горизонтальный 24 сердечники которых подпружинены пружинами 25 и 26 и подвижно соединены с ближним концом регулировочного рычага 27 (фиг. 4). Этот регулировочный рычаг 27 выполнен из двух подпружиненных частей 28 и 29 с возможностью перемещения их друг относительно друга по продольной оси рычага 27. Для осуществления такого перемещения первая часть 28 рычага 27 выполнена полой, а вторая часть 29 заключает в себя шток 30, установленный в этой полости, причем обе части 28 и 29 рычага 27 подпружинены цилиндрической пружиной 31, которая установлена на штоке 30 между торцевыми частями подвижных частей регулировочного рычага 27. Обе части 28 и 29 рычага 27 содержат в сочленениях шарниры. Первая часть 28 при переходе стенки камеры 10 - это шарнир 32, вторая часть рычага 29 в соединении с ответной полусферой - это шарнир 33, ответная полусфера 34 шарнира 33 жестко соединена по продольной оси постоянного магнита с его камерой 10.
Постоянный магнит 5 на фиг. 2 работает следующим образом. Будучи вывешенным в жидкости 11, постоянный магнит 5 имеет нулевую плавучесть, т.е. приобретает невесомость, а невесомым постоянным магнитом 5 легко управлять, т.е. изменять его положение так, чтобы при качке судна он был стабилизирован в пространстве.
Управляющие сигналы о величине курсовой и боковой качки снимаются с датчиков 12 и 13, в качестве которых используются гироскопы кабельного судна. С учетом того, что продольная ось постоянного магнита в общем случае не будет совпадать ни с курсовым, ни с траверзным направлением (фиг. 3), введены датчик угла 16, который используется в перемножителях 14 и 15 для получения реальных значений истинного горизонта по курсу M и по траверзу N. Эти управляющие сигналы, усиленные в усилителях 19 и 20, подаются на исполнительные электромагниты 21 и 22, которые втягивают сердечники 23 и 24 на расстояния, пропорциональные управляющим сигналам. Заметим, что в отсутствии управляющих сигналов (N=M=O - условия полного штиля) пружины 25 и 26 устанавливают рычаг 27 в нейтральное положение, т.е. точно по оси постоянного магнита. Такой режим легко достигается путем регулировки натяжения пружин 25 и 26. При наличии управляющих сигналов (N≠0, M≠0 - волнующееся море) управляющие усилия от электромагнитов 21 и 22 поступают на рычаг 27, который, вращаясь в шарнире 32 (фиг. 4), передает усилие на шарнир 33, а тот, в свою очередь, заставляет смещаться корпус постоянного магнита 5 относительно продольной оси. При этом пружинные растяжки 9 удерживают постоянный магнит 5 в нейтральном положении при отсутствии управляющих сигналов.
В процессе регулировки положением постоянного магнита относительно его продольной оси рычаг 27 удлиняется, что достигается выдвижением штока 31 из первой части 28 регулировочного рычага 27 за счет механического воздействия пружины 30.
Устройство компенсации помех работает следующим образом.
При качке кабельного судна в океанском блоке 1 наводится электродвижущая сила от магнитного поля Земли, которая поступает на вход измерительного прибора 8. Чтобы этого не произошло, в схему измерительного прибора включена компенсационная катушка индуктивности 3, жестко соединенная с корпусом судна, которая размещена в поле постоянного магнита, установленного на гироскопическом неподвижном подвесе 10, и через регулируемый усилитель 7 соединена с измерительным прибором 8. В зависимости от того, как будет влиять волнение моря на кабельное судно, в океанском блоке 1 наводится определенная величина электродвижущей силы. Для того, чтобы ее скомпенсировать с помощью компенсационной катушки индуктивности 3, включен регулируемый усилитель постоянного тока 7, который и выполняет эту работу.
Предлагаемое устройство позволяет исключить влияние наводимой электродвижущей силы от земного магнетизма в океанском блоке подводного кабеля, что способствует безошибочному измерению электрических характеристик подводного кабеля на постоянном токе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО ИЗМЕРЕНИЙ ПОСТОЯННЫХ МАГНИТНЫХ ПОЛЕЙ | 1996 |
|
RU2136014C1 |
| СПОСОБ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 1995 |
|
RU2065651C1 |
| УСТРОЙСТВО ДЛЯ АВАРИЙНОЙ СВЯЗИ ВОДОЛАЗА С ПОДВОДНОЙ ЛОДКОЙ | 2002 |
|
RU2209151C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЭЛЕКТРОПРОВОДНЫХ ЭЛЕМЕНТОВ ИЗДЕЛИЯ | 1998 |
|
RU2171982C2 |
| УСТРОЙСТВО РЕГИСТРАЦИИ МАГНИТНОГО ПОЛЯ | 1997 |
|
RU2134890C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МЕХАНИЧЕСКИХ РАЗРУШЕНИЙ ЛОПАТОК РОТОРА ТУРБИНЫ | 1998 |
|
RU2151390C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК | 1997 |
|
RU2125276C1 |
| СИСТЕМА ВНУТРИКОРАБЕЛЬНОЙ ГРОМКОГОВОРЯЩЕЙ СВЯЗИ И ТРАНСЛЯЦИИ | 1996 |
|
RU2131168C1 |
| Кабелеизвлекающая машина | 1983 |
|
SU1143809A1 |


Изобретение относится к электротехнике, в частности к устройствам компенсации наводимых помех по постоянному току. Целью изобретения является исключение влияния наводимой электродвижущей силы от земного магнетизма в океанском блоке подводного кабеля. Цель изобретения достигается за счет того, что в измерительную схему включен регулировочный усилитель постоянного тока, вход которого соединен с компенсационной катушкой индуктивности, жестко соединенной с корпусом судна и размещенной в поле постоянного магнита, установленного на гироскопическом неподвижном подвесе. Блок-схема и работа гироскопического подвеса приводится. В результате применения устройства компенсации помех исключается влияние наводимой электродвижущей силы от земного магнетизма в океанском блоке подводного кабеля, что способствует безошибочному измерению электрических характеристик подводного кабеля на постоянном токе. 4 ил.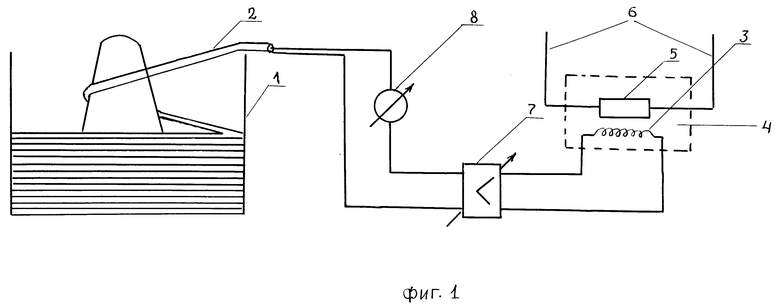
Устройство для компенсации помех, содержащее усилитель, выход которого соединен с компенсационным проводом, отличающееся тем, что введена компенсационная катушка индуктивности, соединенная с входом усилителя, а усилитель выполнен в виде регулируемого усилителя постоянного тока, причем компенсационная катушка индуктивности жестко соединена с корпусом судна и размещена в поле постоянного магнита, который установлен на прижимающих пружинных растяжках внутри камеры с незамерзающей жидкостью, например этиленгликолем, причем произведение объема вытесненного постоянного магнита на удельный вес незамерзающей жидкости выбрано равным в точности весу постоянного магнита, при этом передняя часть постоянного магнита соединена с отверстием в камере с помощью сопряженных элементов шаровых поверхностей, с зазором между ними, заполненным гермосмазкой, при этом введен блок стабилизации постоянного магнита в пространстве, содержащий гироскопические датчики положения судна относительно истинного горизонта по курсу М и по траверзу N движение судна, выходы которого подключены к первым входам соответственно конусного и синусного умножителей, причем к вторым входам этих умножителей подключен датчик угла, образуемого продольной осью судна и направлением на ось магнитного поля земли, а выходы этих умножителей через идентичные усилители тока подключены к исполнительным электромагнитам, которые вытягивают вертикальный и горизонтальный сердечники, которые подпружинены идентичными пружинами и подвижно соединены с регулировочным рычагом, который выполнен из двух подпружиненных частей с возможностью перемещения их друг относительно друга по продольной оси рычага, для чего первая часть рычага выполнена полой, а вторая часть включает в себя шток, установленный в этой полости, причем обе упомянутые части регулировочного рычага подпружинены цилиндрической пружиной, которая установлена на штоке между торцевыми частями подвижных частей регулировочного рычага, причем первая часть рычага при проходе стенки камеры, вторая часть рычага в соединении с ответной полусферой, которая жестко соединена по продольной оси постоянного магнита с его камерой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство 450374, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство 924873, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент 4661753, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| DE, заявка 3142515 кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| GB, патент 1271129, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
