Изобретение относится к технике извлечения из грунта кабелей связи и энергоснабжения временного пользования. Известны устройства для извлечени кабелей из грунта, содержащие базовы тягач, рабочий орган, аппаратуру для определения местоположения кабеля и электрогидросистему для наведения тягача и рабочего органа на трассу извлекаемого кабеля, В.указанных уст ройствах аппаратура содержит генератор переменного напряжения, индуктив ные датчики: курса транспортного средства, трассы рабочего органа, глубины и опорного напряжения, блок обработки и электрогидросистему для удержания тягача и рабочего органа на трассе кабеля, а рабочего органа кроме того - на заданном расстоянии над извлекаемым кабелем 1 и 2J . Недостатком указанных устройств является то, что величина зоны нечувствительности аппаратуры (зоны отработки систем наведения) изменяется при изменении силы тока, проходящего по извлекаемому кабелю. При этом сила тока зависит от состояния грунта (сухой, влажный) и от длины извлекаемого кабеля. При этом сила тока может изменяться в десятки раз Это вызьгеает изменение зоны нечувствительности обратно пропорционально изменению силь тока. При этом увеличение силы тока в кабеле приводит к частым отработкам систем наведения и к преждевременному их износу, а уменьшение приводит к сходам рабочего органа с трассы кабеля, а также к уменьшению защитного слоя грунта над извлекаемьм кабелем и его повреж дению или к образованию петель и к обрыву кабеля, при этом снижаются темпы демонтажа и возрастают физические нагрузки на членов экипажа. Известно устройство для определения глубины залегания кабеля, повышающее точность удержания рабочего органа над извлекаемым кабелем при постоянстве величины тока, протекающего по извлекаемому кабелю от генератора, установленного на кабеле извлекающей машины. При этом один полюс генератора переменного напряжения соединен с корпусом кабелеукладчика, а второй подключен к жилам (экрану) извлекаемого кабеля t3. В зависимости от категории грунта по электропроводимости и длины извлекаемого кабеля резко меняется переходное сопротивление гусеница тягачагрунт и кабель-грунт, что приводит к резкому измерению силы тока Из практики известно, что ток в кабеле в зависимости от категории грунта и-длины кабеля при постоянстве выходного напряжения изменяется от 2 мА до 50-80 мА, что вызывает соответствующее изменение и зоны отработки: чем больше ток в кабеле, тем меньше зона отработки и наоборот, чем меньше ток в кабеле, тем больше зона отработки. Отработка систем управления по курсу транспортного средства и трасса рабочего органа будет зависить от разности напряжений опорного датчика и датчика курса (трассы) и направления сдвига фазы +П или -П. При этом, чем меньше ток в кабеле, тем меньше амплитуды.наводимых ЭДС. Это приводит к увеличению зоны нечувствительности величины смещения с трассы и к сходу тягача и рабочего органа с трассы кабеля. При наведении рабочего органа на трассу по глубине используют только разность напряжений. При уменьшении силы тока в кабеле зона нечувствительности увеличивается, т.е. рабочий орган приближается к извлекаемому кабелю весьма близко и повреждает его или удаляется на большое расстояние, защитный слой rpjTHTa становится большим и д плотных грунтах кабель «брьшается. Известна также кабелеизйЭтекающая машина, содержащая базовьй тягач, контуры управления рабочим органом по глубине, курсу и трассе, каждый из которых имеет фазочувствительный детектор, исполнительные реле, соединенные с электрогидрозолотниками управления рабочим органом, и последовательно соединенные соответствующий датчик к регулируемый усилительдетектор, а контур управления рабочим органом по глубине дополнительно содержит сумматор, фазовращатель и последовательно соединенные опорный датчик и второй регулируемый усилительдетектор, при этом выход фазовращателя подключен к первым входам фазочувствительных детекторов всех контуров управления 4 . Однако известное устройство также имеет низкую точность наведания тягача и рабочего органа на трассу извлекаемого кабеля при изменении в нем силы тока в широких пределах.
Цель изобретения - повышение точности наведения тягача и рабочего органа на трассу извлекаемого кабеля при изменении в нем силы тока в широких пределах.
Поставленная цель достигается темчто кабелеизвлекающая машина, содержащая базовый тягач, контуры управления рабочим органом по глубине, курсу и трассе, каждый из которых имеет фазочзгаствительный детектор, исполнительные реле, соединенные с электрогидрозолотниками управления рабочи юрганом, и последовательно соединенные соответствующий датчик и регулируемый усилитель-детектор, а контур управления рабочим органом по глубине дополнительно содержит сумматор, фазовращатель и последовательно соединенные опорный датчик и второй регулируемый усилитель-детектор, при этом выход фазовращателя подключен к первьм входам фазочувствительных iдетекторов всех контуров управления, снабжена реле защиты, сигнализатором последовательно соединенными датчиком эталонного напряжения, регулятором уровня эталонного напряжения и делителем, каждый контур управления рабочим органом по курсу и по трассе снабжен умножителем, вход которого подключен к соответствундаему усилителю-детектору, а выход к соответствующему фазовому детектору, контур управления рабочим органом по глубине снабжен первьм и вторым умножителями и дополнительным регулируемым усилителем-детектором, вход которого соединен с опорным датчиком а выход подключен к входу реле защиты и к вторсжу входу делителя, выходы первого и второго регулируемых усилителей-детекторов подключены соответственно к входам первого и второго умножителей, выход первого умножителя и первый выход второго умножителя подключены через сумматор к второму входу фазочувствительного детектора, при этом выход делителя подключен ко вторым входам умножителей всех контуров, а в цепь сигнализатора и между фазочувствительньми детекторами и исполнительными реле во всех контурах включены замыкающие .контакты реле защиты.
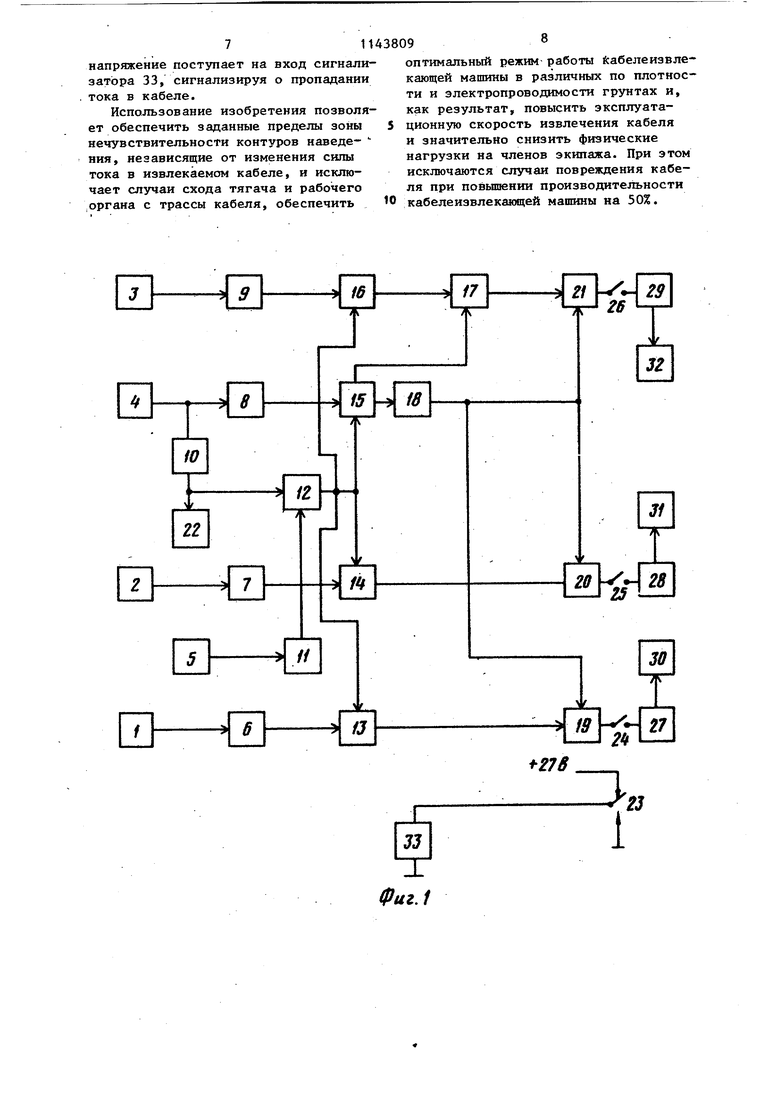
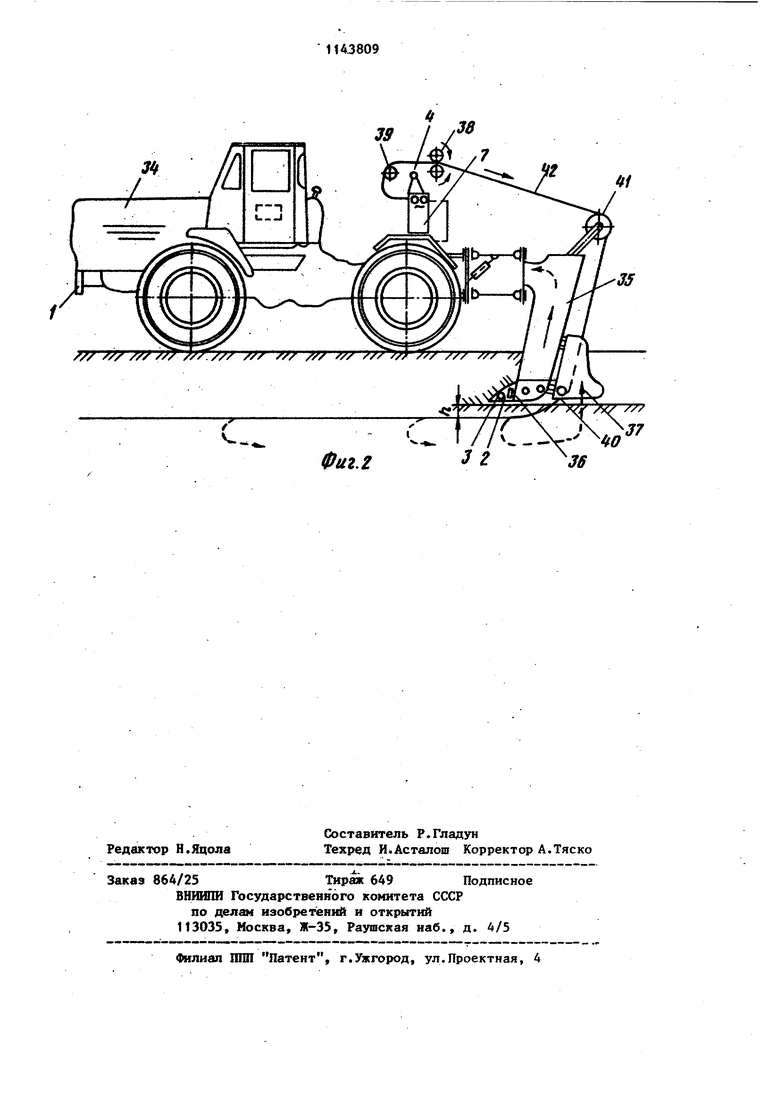
На фиг. 1 представлен блок-схема устройства, на фиг. 2 - схема размещения.датчиков.
Устройство содержит датчик 1 курса, датчик 2 трассы, датчик 3 глубины, опорный датчик 4, датчик 5 эталонного напряжения, регулируемые усилители-детекторы 6-10, регулятор 11 уровня эталонного напряжения, делитель 12, умножители 13-16, сумматор 17, фазовращатель 18, фазовые детекторы 19-21, реле 22 защиты, контакты 23-26 реле защиты, исполнительные рели 27-29 включения электрогидрозолотников 30-32, сигнализатор 33, тягач 34, рабочий орган 35, долото 36, приеьгную кассету 37, приемные ролики 38, направлякнцие ролики 39-41, извлекаемый кабель 42. Элементы 3,4,8,9,10,15,16,17,18,21,29 и 32 образуют контур управления рабочим органом по глубине, элементы 2, 7, 14, 20 и 28 - контур управления рабочим органом по трассе, элементы 1,6,13,19,27 и 30 - контур управления рабочим органом по курсу.
Кабелеизвлекшощая машина работает следукядим образом.
Уменьшение тока в кабеле приводит к пропорциональному увеличению сигнала на выходе делителя, в котором эталонное напряжение делят на опорно напряжение. Во сколько раз уменьшится ток в кабеле и соответственно напряжение на датчике, во столько раз увеличится напряжение на выходе делителя. Это напряжение поступает на йходы умножителей каналов ивыходные напряжения на их выходах остаются такими же, какими были до изменения силы тока в кабеле, при там же положении рабочего органа и тягача относительно извлекаемого кабеля. Это приводит к неизменности величины зоны отработки (чувствительности систем наведения).
Величину зоны защитного слоя грунта над извлекаемым кабелем устанавливают регулировкой усиления сигнала датчика глубины, устанавливаемого в долоте рабочего органа в нижней его части у носка. При этом нижнюю полость долота зак1ХФают диэлектри ческой пластиной (текстолит и т.п.). Ось катушки устанавливают горизонтално и ортогонально продольной оси рабочего органа Катушку курса устанав,ливают в передней части тягача на ег 11 продольной оси ортогонально поверхности земли, катушку трассы рабочего органа устанавливают в долото рабочего органа ортогонально поверхности земли совместно с катушкой датчика глубины. Величину зоны отработки каждого канала устанавливают изменением усиления усилителей 6-9 каналов Тягач и рабочий орган устанавливают на трассу извлекаемого кабеля, к свободному концу кабеля подключают генератор и перемещают кабель вправо или влево на величину, когда произойдет отработка систем курса и трассы, в это время срабатывают реле курса и трассы. Если зоны отработки велики или малы, изменением усиления усилителей этих каналов добиваются заданной величины этих зон, затем устанавливают величину защитного слоя грунта над извлекаемым кабелем. Устанав лив.ают кабель под его продольной осью на заданное расстояние и изменением усиления усилителя 9 добивают ся нулевого уровня сигнала. Затем заглубляют рабочий орган и начинают движение. При смещении тягача и рабо чего органа с трассы кабеля в пределах заданной ширины появляется напряжение, величина которого определяется величиной смещения, а фаза направлением смещения. Напряжение с выходов датчиков 1 и 2 поступает через усилители 6 и 7 на входы умножителей 13 и 14, на вторые входы которых поступает опорное напряжение через усилитель-детектор 10 и делитель 12, при этом на выходе усилителя-детектора 10 напряжение равно где К - коэффициент пропорционально I - ток в кабеле; - частота L - индуктивность катушки 4; Гр - расстояние от катушки 4 до извлекаемого кабеля. На выходе делителя 12 получают напряжение На выходе умножителя 13 получают s HirlVo KU,,(u)t.bj т.е. на выходе умножителя 13 получа напряжение, независимое от величины 9 тока в кабеле. Аналогично на выходе умножителей 1 А-16 получают напряжения, независимые от величины тока в кабеле, а зависимые только от расстояния между датчиками и кабелем, а для датчика курса и трассы фаза напряжения зависят от направления смещения. Работа систем наведения тягача и рабочего органа на трассу кабеля аналогичны. При смещении тягача (рабочего органа) с трассы в ту или другую сторону происходит и смещение оси катушки с оси кабеля, и на ней наводится ЭДС, величина которой зависит от величины смещения, а фаза от - направления смещения. Эти напряжения поступают на входы фазовых детекторов. Величина напряжения зависит от величины смещения (при изменении силы тока в кабеле,, широких пределах), а полярность (знак напряжения) - от напряжения смещения. Система удержания рабочего органа на заданном расстоянии работает следующим образом. При приближении рабочего органа к извлекаемому кабелю величина наводимого напряжения на датчике увеличивается. На сумматоре это напряжение Сравнивают с опорным, сдвинутым по фазе на 90°. I.... На выходе сумматора получают напряжение, фаза которого лежит в пределах О - (+90 ) или О - 90 . На выходе фазового детектора получают положительное или отрицательное напряжение, пропорциональное амплитуде и фазе принятого сигнала. Напряжение с выхода фазового, детектора через замкнутые контакты реле 22 поступает на реле включения электрогидрозолотников. В зависимости от полярности поступившего напряжения тягач и рабочий орган перемещаются вправо или влево до получения на выходе фазовогй детектора нулевого уровня, а рабочий орган по сигналу с выхода детчика глубины, кроме того, вверх или вниз. При обрыве кабеля на вькоде опорного датчика 4 напряжение равно нулю, реле 22 отпускает и размыкает контакты 24-26, тягач и рабочий орган кабелеукладчика находится в таком поло1жении, в каком они находились до об|рьгоа. Контакты 25 реле замкнуты и напряжение поступает на вход сигнализатора 33, сигнализируя о пропадании тока в кабеле. Использование изобретения позволяет обеспечить заданные пределы зоны нечувствительности контуров наведе- ния, независящие от изменения сипы тока в извлекаемом кабеле, и исключает случаи схода тягача и рабочего .органа с трассы кабеля, обеспечить 11 9 оптимальный режим работы йабелеизвлекающей машины в различных по плотности и электропроводимости грунтах и, как результат, повысить эксплуатационную скорость извлечения кабеля и значительно снизить физические нагрузки на членов экипажа. При этом исключаются случаи повреждения кабеля при повышении производительности кабелеизвлекающей машины на 50%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления кабелеизвлекающей машиной | 1988 |
|
SU1594251A1 |
| Кабелеукладчик | 1980 |
|
SU943954A1 |
| Кабелеукладчик | 1980 |
|
SU861501A1 |
| Кабелеизвлекающая машина | 1984 |
|
SU1187232A1 |
| Кабелеукладчик | 1976 |
|
SU703631A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ХОДОМ РАБОЧЕГО ОРГАНА КАБЕЛЕИЗВЛЕКАЮЩЕЙ МАШИНЫ | 1970 |
|
SU277048A1 |
| Система управления влажностью жил на бумагомассной машине | 1988 |
|
SU1644105A1 |
| Система автоматической стабилизации поперечного наклона рабочего органа землеройной машины | 1980 |
|
SU899808A1 |
| ПРИБОР ДЛЯ ИНДУКЦИОННОГО КАРОТАЖА СКВАЖИН | 1966 |
|
SU187170A1 |
| Металлоискатель | 1980 |
|
SU911416A1 |
КАБЕЛЕИЗВЛЕКАЮЩАЯ МАШИНА, содержащая базовый тягач, контуры управления рабочим органом по глубине, курсу и трассе, каждый из которых имеет фазочувствительный детектор, исполнительные реле, соединенные с электрогидрозолотниками управления рабочим органом, и последовательно соединенные соответствующий датчик и регулируемый усилитель-детектор, а контур управления рабочим органом по глубине дополнительно содержит сумматор, фазовращатель и последовательно соединенные опорный датчик и второй регулируемый усилитель-детектор, выход фазовращателя подключен к первым входам фазочувствительных детекторов всех контуров управления, отличающаяся тем, что, с целью повьппения точности наведе1ния тягача и рабочего органа на трассу извлекаемого кабеля при изменении в нем силы тока в широких пределах, :она снабжена реле защиты, сигнализатором, последовательно соединенными датчиком эталонного напряжения, регулятором уровня эталонного напряжения и делителем, каждый контур управления рабочим органом по курсу и по трассе снабжен умножителем, вход которого подключен к соответствующему усилителю-детектору, а выход - к соответствующему фазовому детектору, контур управления рабочим органом по глубине снабжен первым и вторьм умножителями и дополнительньм регулируемым усилителем-детектором, вход (Л которого соединен с ойорным датчиком, а выход подключен к входу реле защиты и к второму входу делителя, выходы первого и второго регулируемых усилителей-детекторов подключены соответственно к входам первого и второго умножителей, выход первого ум4 ножителя и первый выход второго умноС 00 О жителя подключены через сумматор к второму входу фазочувствительного детектора, при этом выход делителя подключен к вторьм входам умножитесо 1лей всех контуров, а в цепь сигнал1гзатора и между фазочувствительными детекторами и исполнительными реле всех контуров включены замыкающие контакты реле защиты.
1-276
yjr JJ ±
Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кабелеукладчики | |||
| М., Машиностроение, 1974, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
