Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов.
Известен [1] автоколебательный рулевой привод управляемого снаряда по заявке N 93032538 (аналог), по которой получено положительное решение [2] о выдаче патента на изобретение.
Наиболее близким [3] к изобретению является известный автоколебательный автопилот управляемого снаряда по заявке N 93000704 (прототип), по которой получено положительное решение [4] о выдаче патента на изобретение. Автоколебательный автопилот содержит последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний с ограничительными элементами, выполненный на операционном усилителе, нелинейный (релейный) элемент, усилитель мощности и рулевую машину, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания. Вследствие наличия отрицательной обратной связи и релейного элемента рули работают в автоколебательном режиме.
В функционировании известного автоколебательного автопилота с импульсными сигналами управления можно выделить два режима: режим отработки большого входного ступенчатого воздействия и режим согласования и удержания нулевого положения при отсутствии (отключении) на входе автопилота импульсного сигнала управления.
Первый режим характеризуется функционированием автопилота на предельных ускорениях и скоростях, определяющим критерием качества при этом является минимальное время поворота рулей из нулевого положения на максимальный угол.
Критерием эффективности в режиме согласования и удержания нулевого положения является минимальное время перемещения рулей с упора в нулевое положение, перерегулирование и статическая точность удержания рулей в нулевом положении.
Недостатком известного автоколебательного автопилота управляемого снаряда является низкое быстродействие (большое время поворота рулей из нулевого положения на максимальный угол) при функционировании автопилота в первом режиме из-за ограничения выходного напряжения и инерционности корректирующего фильтра.
Введение корректирующего фильтра интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний и ограничительных элементов в нем позволили обеспечить критерии эффективности (статическую точность удержания рулей в нулевом положении и минимальное время перемещения рулей с упора в нулевое положение) при функционировании автопилота во втором режиме. Ограничение выходного напряжения в фильтре за счет введенных в него ограничительных элементов является эффективным техническим средством в части уменьшения времени переходного процесса при отработке заднего фронта импульса управления при функционировании автопилота в этом режиме, причем чем меньше уровень ограничения, тем меньше время переходного процесса. Однако эта необходимая минимальная величина ограничения в фильтре для нормального функционирования автопилота во втором режиме входит в противоречие с потребной максимальной величиной ограничения для нормального функционирования автопилота в первом режиме при отработке переднего фронта импульса управления.
Цель изобретения - повышение быстродействия автопилота (уменьшение времени поворота рулей из нулевого положения на максимальный угол) и обеспечение максимального угла поворота рулей (по упорам) при отработке автопилотом импульсных сигналов управления, т.е. при функционировании автопилота в первом режиме.
Это достигается тем, что в автоколебательном автопилоте, содержащем последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний с ограничительными элементами, выполненный на операционном усилителе, релейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, согласно изобретению вход задания автопилота соединен с дополнительным управляющим входом релейного элемента.
На фиг. 1 представлен автоколебательный автопилот, состоящий из блока 1 вычитания (БВ), корректирующего фильтра (КФ) 2 с ограничениями, релейного элемента (РЭ) 3, усилителя мощности (УМ) 4, рулевой машины (РМ) 5 в составе управляющего электромагнита (УЭМ) 6, исполнительного двигателя (ИД) 7, связанного с рулями, датчика обратной связи (ДОС) 8, подключенного к сравнивающему входу блока вычитания (БВ) 1.
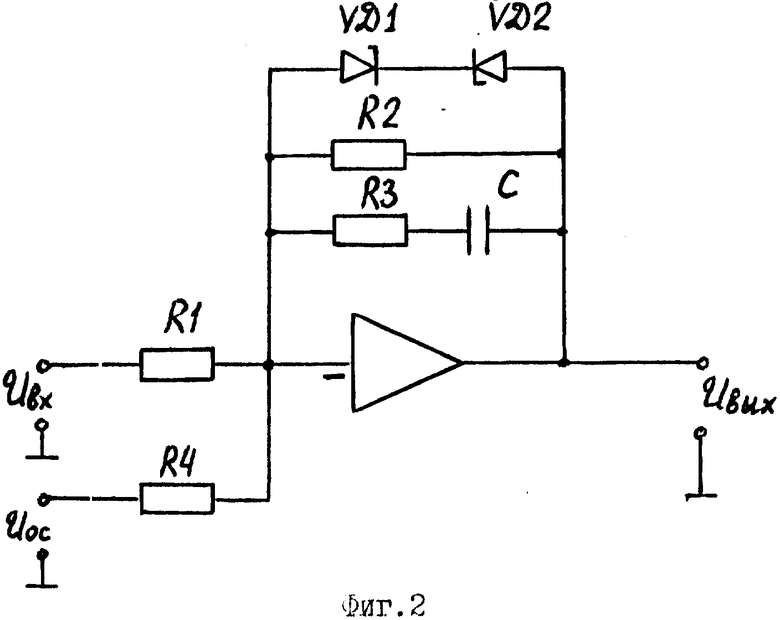
Принципиальная электрическая схема корректирующего фильтра с ограничительными элементами (встречно включенными стабилитронами VD1, VD2) выполнена на операционном усилителе и приведена на фиг. 2, причем блок вычитания (БВ) 1 схемно совмещен с корректирующим фильтром.
На фиг. 1 и 2 представлены Uвх - сигнал управления (задания) автопилота; δ - угол поворота рулей; Uос - сигнал обратной связи автопилота; Uвых - сигнал на выходе корректирующего фильтра.
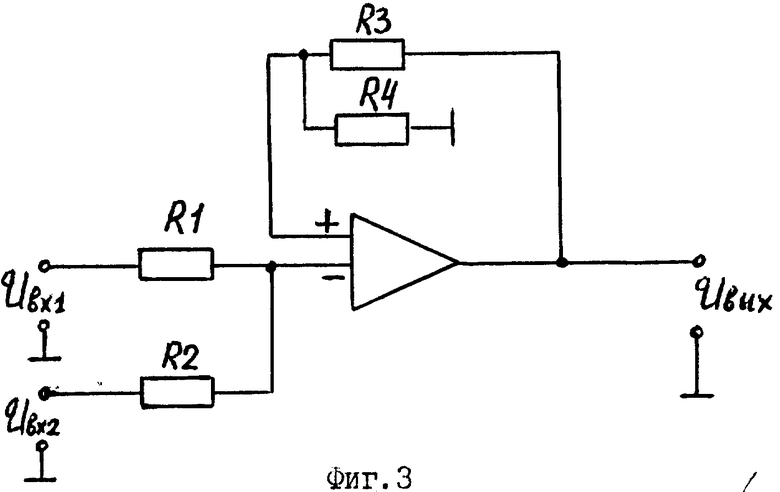
Принципиальная схема релейного элемента представлена на фиг. 3 и выполнена на операционном усилителе (микросхеме типа 153VD2) с положительной обратной связью, реализованной с помощью резисторов R3 и R4. Релейный элемент имеет два управляющих входа, из которых один (Uвх1) подключен к выходу корректирующего фильтра с ограничением, а другой дополнительный (Uвх2) - к входу задания автопилота. Входы выполнены с помощью масштабных резисторов R1, R2, подключенных к инвертирующему входу операционного усилителя.
Автопилот работает следующим образом.
При отсутствии сигнала управления в контуре автопилота вследствие отрицательной обратной связи и релейного элемента устанавливаются автоколебания, частота и амплитуда которых определяется параметрами линейной части и релейного элемента. На выходе релейного элемента при этом существуют прямоугольные колебания 50%-ной скважности частоты автоколебаний. Якорь управляющего электромагнита, поршень рулевой машины и связанные с ним рули колеблются с частотой автоколебаний около нулевого среднего положения. Учитывая, что линейная часть автопилота является фильтром низкой частоты, на выходе автопилота сигнал частоты автоколебаний имеет форму, близкую к синусоидальной. В цепи ошибки автопилота включен корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на высоких частотах (частотах автоколебаний) с передаточной функцией
где
T2>T1.
На выходе корректирующего фильтра амплитуда автоколебаний уменьшается на величину амплитудного ослабления фильтра на частоте автоколебаний, чем достигается увеличение коэффициента передачи релейного элемента для повышения точности работы автопилота (статической точности удержания рулей в нулевом положении при функционировании автопилота во втором режиме).
При подаче импульсного сигнала управления на вход автопилота этот сигнал поступает одновременно без преобразования в корректирующем фильтре на дополнительный управляющий вход релейного элемента и на вход корректирующего фильтра. С момента поступления сигнала на дополнительный вход релейного элемента со входа задания автопилота сигнал на выходе релейного элемента переключится скачком с 50%-ной скважности на 100%-ную и происходит отклонение рулей на максимальный угол с максимальными скоростью и ускорением. С момента поступления сигнала на вход фильтра на выходе фильтра с крутым фронтом нарастет выходной сигнал, как реакция дифференцирующей части фильтра, определяемой постоянной времени T1, на передний фронт импульсного входного сигнала, нарастание идет до величины, определяемой уровнем ограничения ограничительных элементов фильтра (встречно включенных стабилитронов VD1, VD2).
При отключении импульсного сигнала управления выходной сигнал фильтра с уровня ограничения будет уменьшаться сразу с крутым фронтом (за счет дифференцирующих свойств фильтра) и стремиться к нулевому положению. Под действием максимального сигнала обратной связи (так как в результате отработки сигнала управления рули находятся на упоре и сигнал с выхода датчика обратной связи будет иметь максимальное значение) рули будут перемещаться с упора в нулевое положение.
За счет введения ограничения в корректирующий фильтр сформирован необходимый противоимпульс управления, действующий в момент схода рулей с упора, что позволяет улучшить качество переходного процесса (уменьшить время переходного процесса) при перемещении рулей с упора в нулевое положение без снижения точности удержания рулей в нулевом положении.
Введение прямой связи до входа задания автопилота на дополнительный вход релейного элемента позволяет обеспечить максимально достижимое быстродействие автопилота и отработку максимального угла поворота рулей (по упорам) при отработке переднего фронта импульса управления.
Это достоинство в сочетании с минимально возможным временем переходного процесса при перемещении рулей с упора в нулевое положение (при отработке заднего фронта импульса управления) за счет ограничения в фильтре и высокой точностью удержания рулей в нулевом положении за счет фильтра позволило обеспечить в автоколебательном автопилоте с импульсными сигналами управления перспективных управляемых снарядов требуемые динамические и точностные характеристики в широком диапазоне изменения шарнирных нагрузок (от пружинной до перекомпенсации) и развиваемых моментов исполнительного пневмодвигателя рулевой машины, использующего энергию набегающего потока воздуха в широком диапазоне скоростей полета управляемого, например, артиллерийского снаряда с головкой самонаведения.
Таким образом, предлагаемое техническое решение по сравнению с известным позволяет повысить быстродействие, уменьшить время поворота рулей из нулевого положения на максимальный угол и обеспечить отработку максимального угла поворота рулей (по упорам) и в результате повысить точность отработки автопилотом импульсных сигналов управления практически без увеличения массы и габаритов аппаратуры в управляемом снаряде.
Источники информации
1. Автоколебательный рулевой привод управляемого снаряда. Заявка N 93032538, N 24, ВНИИПИ, М., 1996, с.39.
2. Положительное решение ВНИИГПЭ от 25 января 1996 г. о выдаче патента на изобретение по заявке N 93032538 (н/вх. N 628 от 12.02.96).
3. Автоколебательный автопилот управляемого снаряда. Заявка N 93000704, N 23, ВНИИПИ, М., 1995, с. 75.
4. Положительное решение ВНИИГПЭ от 3 апреля 1996 г. о выдаче патента на изобретение по заявке N 93000704 (н/вх. N 1595 от 18.04.96).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2115086C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2079806C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
Изобретение относится к оборонной технике, в частности к управляемым снарядам. Технический результат заключается в повышении быстродействия автопилота (уменьшении времени поворота рулей из нулевого положения на максимальный угол) и обеспечении максимального угла поворота рулей (по упорам) при отработке автопилотом импульсных сигналов управления. Технический результат достигается за счет того, что в автоколебательном автопилоте, содержащем последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний и ограничительными элементами, выполненный на операционном усилителе, релейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, вход задания автопилота соединен с дополнительным управляющим входом релейного элемента. 3 ил.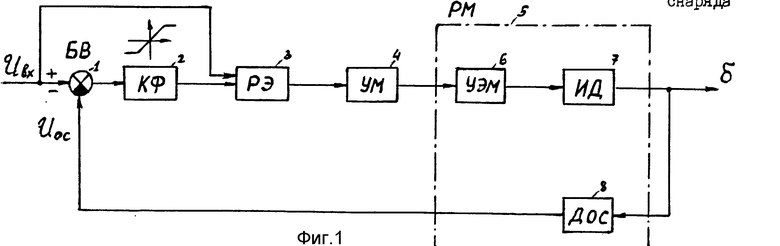
Автоколебательный автопилот управляемого снаряда, содержащий последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний с ограничительными элементами, выполненный на операционном усилителе, релейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, отличающийся тем, что в нем вход задания автопилота соединен с дополнительным управляющим входом релейного элемента.
| SU, 93000704 A, 20.08.95 | |||
| SU, 93032538 A, 10.06.82 | |||
| GB, 2095870 A, 10.06.82 | |||
| US, 4366534 A, 28.12.82. |

