Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов.
Известна релейная автоколебательная система управления (аналог) в сборнике научных трудов Тульского политехнического института [1].
Наиболее близким аналогом (прототипом) изобретения является автоколебательный автопилот управляемого снаряда [2]. Автоколебательный автопилот управляемого снаряда содержит последовательно соединенные блок вычитания, первых вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, нелинейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, корректирующий фильтр выполнен на операционном усилителе, в прямой цепи которого включен первый масштабный резистор, а в цепи отрицательной обратной связи - второй масштабный резистор, параллельно которому включена цепочка из последовательно соединенных третьего масштабного резистора и интегрирующего конденсатора, а также ограничительный элемент, выполненный в виде двух встречно включенных стабилитронов.
В функционировании автопилотов с импульсными сигналами управления можно выделить два режима: режим отработки большого входного ступенчатого воздействия и режим согласования и удержания нулевого положения при отсутствии (отключении) на входе автопилота импульсного сигнала управления.
Первый режим характеризуется функционированием автопилота на предельных ускорениях и скоростях, определяющим критерием качества при этом является минимальное время поворота рулей на максимальный угол.
Критерием эффективности в режиме согласования и удержания нулевого положения является минимальное время перемещения рулей с упора в нулевое положение, перерегулирование и статическая точность удержания рулей в нулевом положении.
Исходя из анализа режимов работы автопилота с импульсными сигналами управления видно, что в режиме согласования и удержания нулевого положения требуется обеспечить заданные показатели качества переходного процесса и точность удержания рулей в нулевом положении.
Для обеспечения статической точности удержания рулей в нулевом положении в известном автоколебательным автопилоте [2] в цепи ошибки между суммирующим и триггерным устройствами включен корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на высоких частотах (частотах автоколебаний) с передаточной функцией:
где
T2>T1.
Этот фильтр позволяет уменьшить амплитуду автоколебаний на входе триггерного устройства и тем самым повысить коэффициент передачи триггерного устройства по полезному сигналу. Увеличение коэффициента передачи триггерного устройства приводит к увеличению коэффициента усиления (добротности) разомкнутого контура привода, а следовательно, к увеличению статической точности удержания нулевого положения автоколебательного рулевого привода.
Однако при наличии корректирующего фильтра такого типа из-за инерционности фильтра не удается обеспечить приемлемых для контура управления снаряда требуемых показателей качества переходного процесса в части времени переходного процесса при отработке автоколебаний рулевым приводом импульсного сигнала управления с упора в нулевое положение.
При прохождении импульсного сигнала через корректирующий фильтр выходной сигнал на выходе фильтра имеет вид, представленный на фиг. 1. В выходном сигнале U
Апериодическая часть при включении сигнала управления практически не сказывается на увеличении времени срабатывания привода при движении рулей на упор, так как движение на упор идет с предельными ускорением и скоростью за счет релейного характера сигнала с выхода триггерного устройства, срабатывающего в точке A (при идеальной релейной характеристике триггерного устройства и нахождении рулей до этого в нулевом положении).
При выключении сигнала управления переключение триггерного устройства в другую сторону произойдет в точке B в момент совпадения сигнала с выхода фильтра и сигнала обратной связи привода. Из фиг. 1 видно, что эта точка находится на апериодической части выходного сигнала фильтра со значительным отставанием во времени Δt от момента выключения сигнала управления. Вследствие этого переходный процесс в рулевом приводе будет недопустимо затянут по времени, что является существенным недостатком известного автоколебательного рулевого привода [2] при отработке импульсных сигналов управления.
Целью изобретения является улучшение качества переходного процесса (уменьшение времени переходного процесса) при отработке автопилотом импульсных сигналов управления.
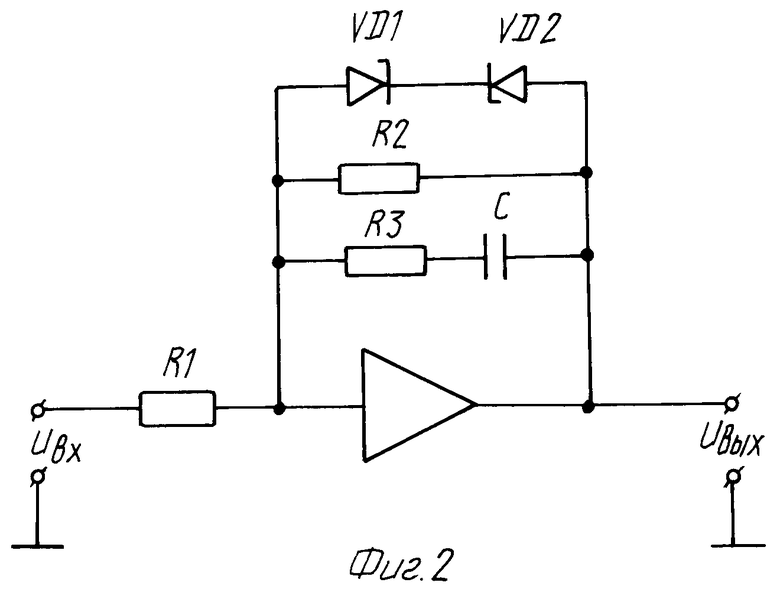
Это достигается тем, что в нем корректирующий фильтр, принципиальная схема которого представлена на фиг. 2, выполнен на операционном усилителе, в прямой цепи которого включен первый масштабный резистор R1, а в цепи отрицательной обратной связи - второй масштабный резистор R2, параллельно которому включены цепочка из последовательно соединенных третьего масштабного резистора R3 и интегрирующего конденсатора C, а также ограничительный элемент, выполненный в виде двух встречно включенных стабилитронов VD1, VD2, причем уровень ограничения Uогр связан с разносом интегрирующей и дифференцирующей постоянных времени (T2, T1) фильтра соотношением
Uогр= L(ωавт)•U
где - ослабление фильтра на частоте автоколебаний,
- ослабление фильтра на частоте автоколебаний,
U
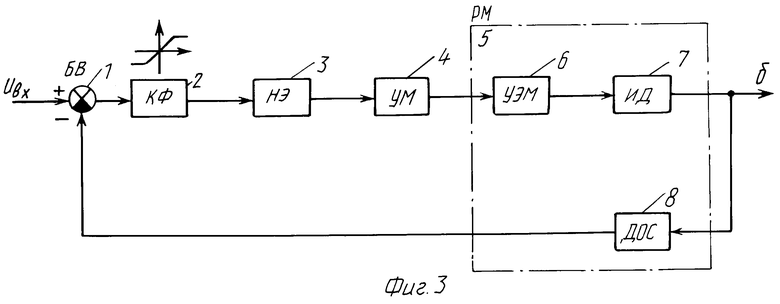
На фиг. 3 представлен автоколебательный автопилот управляемого снаряда, содержащий последовательно соединенные блок вычитания БВ(1), первый вход которого является входом задания автопилота, корректирующий фильтр КФ(2) интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, нелинейный элемент НЭ (3), усилитель мощности УМ (4) и рулевую машину РМ (5) в составе управляющего магнита УЭМ (6), исполнительного двигателя ИД (7) и датчика обратной связи ДОС(8), выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания.
В предлагаемом автоколебательном автопилоте управляемого снаряда корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний выполнен на одном операционном усилителе по схеме, приведенной на фиг. 2 с реализацией ограничительного элемента с помощью двух стабилитронов VD1, VD2.
Линейная зона усилителя без ограничительного элемента VD1, VD2 выбирается равной суммарному значению максимально возможной амплитуды автоколебаний и максимальной скоростной ошибки контура автопилота. Это делается из соображений исключения ограничения максимального быстродействия автопилота, т.е. линейная зона имеет вполне конкретный физический смысл.
Введение предлагаемого фильтра с ограничением позволяет уменьшить амплитуду автоколебаний на входе двухпозиционного релейного элемента без зоны нечувствительности за счет ослабления фильтра на частотах автоколебаний, что позволяет уменьшить линейную зону усилителя, повысить точность автопилота и уменьшить время переходного процесса.
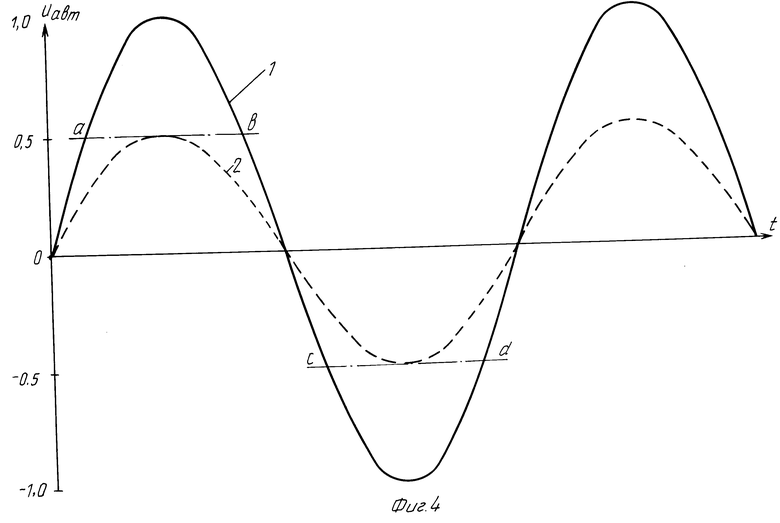
С целью уточнения физического смысла выбора величины уровня ограничения на фиг. 4, 5 приведены соответствующие графики. На фиг. 4 приведены автоколебания Uавт= Umaxsinωавтt на входе релейного элемента автоколебательного автопилота для случаев:
а) отсутствия корректирующего фильтра (кривая 1)%
б) наличия корректирующего фильтра интегродифференцирующего типа с 2-х кратным ослаблением амплитуды автоколебаний на частоте автоколебаний (кривая 2), т. е. для T2-T1 = 2, которое принято, например, в известном автоколебательном автопилоте управляемого снаряда [1, 2].
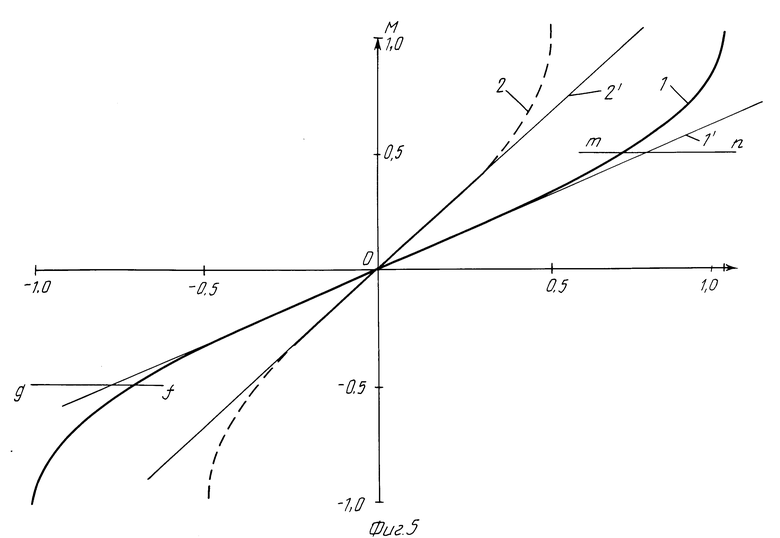
На фиг. 5 приведены линеаризованные автоколебаниями выходные характеристики релейного элемента по полезному сигналу, рассматриваемые как зависимость сигнала M (постоянная составляющая разложения в ряд Фурье сигнала на выходе релейного элемента) от сигнала ΔU на его входе и определяемые по формуле
где
t1 и t2 - длительность положительного и отрицательного импульсов соответственно,
t1 + t2 = Tавт - период автоколебаний.
Сигнал ΔU = Uвх-Uoc - сигнал ошибки автоколебательного автопилота.
На фиг. 5 кривая 1 соответствует случаю линеаризации автоколебаниями (см. фиг. 4 кривая 1) без корректирующего фильтра, кривая 2 - случаю линеаризации автоколебаниями (см. фиг. 4 кривая 2) при наличии корректирующего фильтра. Прямые 1' и 2' касательные к кривым 1 и 2 в начале координат, угол наклона касательных определяется по формуле
Из анализа кривых фиг. 5 видно, что зависимость сигнала M от сигнала ΔU на входе релейного элемента имеет нелинейный характер, причем при Uвх≅ U
Понятно, что линейная зона усилителя без корректирующего фильтра должна быть равна амплитуде автоколебаний U
Видно, что при введении фильтра с 2-х кратным ослаблением на частотах автоколебаний, что соответствует уменьшению амплитуды автоколебаний в 2 раза (кривая 2 на фиг. 4), ограничение по уровню a, b и c, d совершенно не скажется на ограничении зависимости 2 на фиг. 5, т.е. автопилот по развиваемой мощности, а следовательно, по быстродействию не будет иметь ограничения.
Чем больше фильтр будет иметь ослабление на частотах автоколебаний, тем меньший необходимо вводить уровень ограничения.
Конечно с точки зрения получения максимального эффекта в части уменьшения времени переходного процесса при выключении импульса управления необходимо иметь ограничение на фильтре как можно меньше, стремясь как можно ближе к нулевому значению. Но здесь начинает теряться здравый физический смысл с точки зрения уже максимальных физических способностей автоколебательного автопилота. Поэтому уровень ограничения по величине ограничен и связан с разносом постоянного времени фильтра. Поэтому, например, для случая применения в автопилоте фильтра с 2-х кратным разносом постоянных времени фильтра T2/T1 = 2 конкретная величина уровня ограничения Uогр будет составлять около 0,4 - 0,5 от линейной зоны U
Поэтому в части конкретного уровня ограничения заявитель счел необходимым внести уточнения в формулу изобретения, конкретизирующие уровень ограничения в зависимости от параметров фильтра и величины скоростной ошибки контура автопилота.
Устройство работает следующим образом.
При отсутствии входного сигнала в контуре автопилота вследствие отрицательной обратной связи и нелинейного элемента (триггерного устройства) устанавливаются автоколебания, частота и амплитуда которых определяются параметрами линейной части и нелинейного элемента. На выходе нелинейного элемента НЭ при этом существуют прямоугольные колебания 50%-ной скважности частоты автоколебаний.
Якорь управляющего магнита, поршень рулевой машины и связанные с ним рули колеблются с частотой автоколебаний около нулевого среднего положения. Учитывая, что линейная часть автопилота является фильтром низкой частоты, на выходе автопилота сигнал частоты автоколебаний имеет форму, близкую к синусоидальной. На выходе корректирующего фильтра амплитуда автоколебаний уменьшается на величину амплитудного ослабления фильтра на частоте автоколебаний, чем достигается увеличение коэффициента передачи нелинейного элемента для повышения точности работы автопилота.
При подаче импульсного сигнала управления на вход автопилота этот сигнал, как максимальный сигнал ошибки, поступает на вход корректирующего фильтра. С момента поступления сигнала на выходе фильтра с крутым фронтом нарастает выходной сигнал, как реакция дифференцирующей части фильтра на импульсный входной сигнал. Выходной сигнал фильтра переключит в точке A (см. пунктирную кривую на фиг. 1) нелинейный элемент и происходит отклонение руля на максимальный угол. При действии ограничительного элемента в корректирующем фильтре выходной сигнал фильтра достигнет величины ограничения. При отключении импульсного сигнала управления выходной сигнал фильтра с уровня ограничения будет уменьшаться сразу с крутым фронтом за счет дифференцирующих свойств фильтра и стремиться к нулевому положению.
Под действием максимального сигнала обратной связи (так как в результате отработки сигнала управления рули находятся на упоре) рули будут перемещаться с упора в нулевое положение.
За счет введения ограничительного элемента с уровнем ограничения, связанным с параметрами корректирующего фильтра и автопилота, в корректирующий фильтр, выполненный на операционном усилителе, сформирован необходимый противоимпульс управления, действующий в момент схода рулей с упора, что позволило существенно улучшить качество переходного процесса (уменьшить время переходного процесса) при перемещении рулей с упора в нулевое положение без снижения точности удержания рулей в нулевом положении и расширить возможность практического применения автоколебательных автопилотов в управляемых снарядах с импульсными сигналами управления.
Это достоинство в сочетании с высокой точностью позволило обеспечить в автоколебательном автопилоте с импульсными сигналами управления перспективных управляемых снарядов требуемые динамические и точностные характеристики в широком диапазоне изменения шарнирных нагрузок (от пружинной до перекомпенсации) и развиваемых моментов исполнительного пневмодвигателя рулевой машины, использующего энергию набегающего потока воздуха в широком диапазоне скоростей полета управляемого, например, артиллерийского снаряда с головкой самонаведения.
Таким образом, предлагаемое техническое решение по сравнению с известным позволяет улучшить качество переходного процесса (уменьшить время переходного процесса) для различных автоколебаний автопилотов управляемых снарядов и в результате повысить точность отработки автопилотом импульсных сигналов управления практически без увеличения массы и габаритов аппаратуры в управляемом снаряде.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2117324C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2079806C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
Изобретение относится к оборонной технике, в частности к управляемым снарядам. Целью изобретения является улучшение качества переходного процесса за счет уменьшения времени переходного процесса. Автоколебательный автопилот управляемого снаряда содержит последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, выполненный на операционном усилителе, а также ограничительный элемент, выполненный в виде двух встречно включенных стабилитронов в цепи обратной связи операционного усилителя, нелинейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, при этом уровень ограничения связан с разносом интегрирующей и дифференцирующей постоянных времени фильтра соотношением
Uогр= L(ωавт)•U
где L (L(ωавт)) - ослабление фильтра на частоте автоколебаний,
U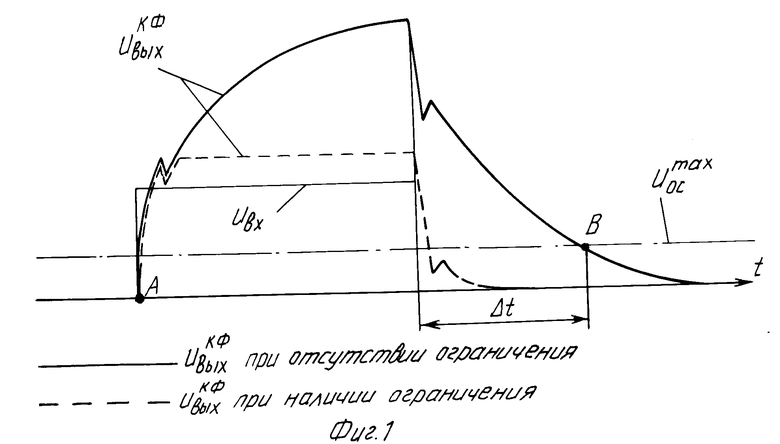
Автоколебательный автопилот управляемого снаряда, содержащий последовательно соединенные блок вычитания, первый вход которого является входом задания автопилота, корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, выполненный на операционном усилителе, в прямой цепи которого включен первый масштабный резистор, а в цепи отрицательной обратной связи - второй масштабный резистор, параллельно которому включены цепочка из последовательно соединенных третьего масштабного резистора и интегрирующего конденсатора, а также ограничительный элемент, выполненный в виде двух встречно включенных стабилитронов, нелинейный элемент, усилитель мощности и рулевую машину с управляющим магнитом, выход которой является выходом автопилота и подключен через датчик обратной связи к второму входу блока вычитания, отличающийся тем, что в нем уровень ограничения Uогр связан с параметрами фильтра и автопилота соотношением
где R2, R3 - второй и третий масштабные резисторы;
U
ΔU
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Релейная автоколебательная система управления | |||
| Сборник научных трудов | |||
| Моделирование и оптимизация систем автоматического управления и их э лемен тов | |||
| Тульский политехнический институт | |||
| - Тула, 1990, с.31 - 36 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, за явка, 93000704/09, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
