Заявляемое изобретение относится к космической технике. Областью применения изобретения является управление движением космических аппаратов. Изобретение может быть использовано для изменения (как правило, уменьшения) величины отклонения направления импульса коррекции от фактического центра масс космического аппарата (КА).
Известны способы управления движением КА, заключающиеся в выдаче импульса коррекции орбиты КА, направленного (как и вектор тяги соответствующего двигателя) через центр масс КА, расположенный на оси КА, перпендикулярной плоскости, в которой расположены центры масс топливных баков, с использованием двигателей ориентации для управления вращением КА по направлениям трех осей (тангаж, крен, рыскание). Например, источники: [1] - RU 95118042 «Космический аппарат блочно-модульного исполнения», Научно-производственное объединение прикладной механики, заявка на изобретение; патенты РФ: [2] - RU №2149805 «Реактивная система управления движением космического аппарата», Опытное конструкторское бюро «Факел»; [3] - RU №2115008 «Устройство управления движением космического аппарата» и [4] - RU №2220077 «Пилотируемый космический корабль» Открытое акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева».
При расположении двигателей коррекции и топливных баков относительно центра масс подобным образом, по мере выработки топлива, фактическое положение центра масс КА меняется. В связи с этим, далее по тексту в рамках данной заявки использованы термины «начальный центр масс КА» и «фактический центр масс КА». «Начальный центр масс КА» - это точка, соответствующая положению центра масс КА, определенного на начало эксплуатации с учетом массы заправляемого топлива, через которую проходят направления векторов тяги двигателей коррекции. «Фактический центр масс КА» - это точка, соответствующая положению центра масс КА, определенного на текущий момент времени при эксплуатации КА, например, путем выдачи предварительного импульса коррекции, определения величины возмущающего момента и, соответственно, положения фактического центра масс КА на текущий момент времени. Алгоритмы определения фактического положения центра масс КА описаны, например, в источнике [5] - патент. РФ - RU №2114031 «Способ определения положения центра масс космического аппарата в процессе его управления с помощью силовых приводов», Ракетно-космическая корпорация «Энергия» им. С.П. Королева и в источнике [6] - патент. РФ - RU №2270789 «Способ управления движением космического аппарата», Ракетно-космическая корпорация «Энергия» им. С.П. Королева.
Положение фактического центра масс КА зависит от: величины выработки топлива, от технологических погрешностей, допущенных при сборке КА, тепловых и механических деформаций конструкции КА, от величины и положения дополнительной присоединенной массы (для случая движения связки КА). На начало эксплуатации КА начальный и фактический центр масс практически совпадают. При эксплуатации КА, по мере выработки топлива, происходит удаление фактического центра масс от начального. При этом появляется и увеличивается отклонение направления импульса коррекции от фактического центра масс КА. (Примечание. За отклонение направления импульса коррекции от фактического центра масс КА принимается, например, расстояние от точки, в которой расположен фактический центр масс КА, до прямой, вдоль которой направлен вектор тяги соответствующего двигателя). Это приводит к формированию возмущающего момента, который необходимо компенсировать, например, с использованием двигателей ориентации, что требует расхода запаса топлива КА.
Проблема смещения фактического центра масс может быть наиболее актуальной для сервисных космических аппаратов, предназначенных для удаления объектов космического мусора (ОКМ) с геостационарной орбиты (ГСО). Подобные космические аппараты, как правило, оснащены узлом захвата ОКМ и дополнительным запасом топлива, величина которого зависит от количества заданных к удалению ОКМ. Описание применения сервисного КА приведено, например, в работе [7] - патент RU №2559392 «Способ удаления с геостационарной орбиты нефункционирующего космического аппарата», ФГУП ЦНИИмаш. Доля массы топлива в КА данного типа от общей массы КА, в зависимости от требований назначения, по предварительным оценкам, может составлять до 30%. Вместе с этим, задачей подобных КА является захват, то есть присоединение к собственной конструкции ОКМ, сопоставимого по массе с самим сервисным КА. Данные факторы могут существенно влиять на осевое и радиальное перемещение фактического центра масс от начального центра масс, как самого сервисного КА, так и связки КА с ОКМ.
Прототипом способа управления движением космического аппарата выбран способ, реализуемый с помощью устройства, описанного в работе [3] - RU №2115008 «Устройство управления движением космического аппарата».
Данный источник описывает устройство управления движением космического аппарата, содержащее исполнительные органы в виде двигателей-маховиков, блок управления двигателями-маховиками с измерителями векторов их угловой скорости, а также один или более электроракетных двигателей с управляемой по направлению тягой. Электроракетные двигатели установлены с обеспечением возможности прохождения линий действия их тяг вне центра масс космического аппарата. В состав устройства включен блок управления направлением тяги электроракетных двигателей, причем измеритель угловой скорости вращения каждого двигателя-маховика соединен с блоком управления направлением тяги электроракетных двигателей. Возможность управления направлением тяги обеспечивается тем, что электроракетный двигатель выполнен в виде плазменного ускорителя с замкнутым дрейфом электронов, в котором, по меньшей мере, один источник магнитодвижущей силы в виде управляющей катушки намагничивания подключен к блоку управления направлением тяги. Способ, реализуемый с помощью данного устройства, заключается в том, что управление движением вокруг центра масс КА и движением центра масс КА осуществляют одними и теми же исполнительными органами - электроракетными двигателями (ЭРД) с отклоняемыми векторами тяги. Отклонение вектора тяги по данному способу выполняют для создания разгрузочного момента при накоплении электрическим двигателем-маховиком предельной угловой скорости.
Недостатком подобного способа управления движением, например, применительно к задачам сервисных космических аппаратов, а также для общих случаев значительного смещения фактического центра масс КА является невозможность изменения (как правило, уменьшения) величины отклонения направления импульса коррекции от фактического центра масс КА. При существенном росте величины отклонения направления импульса коррекции от фактического центра масс КА, например, при выработке топлива, при включении двигателя коррекции, возникает пропорциональный возмущающий момент, для компенсации которого необходимо создавать управляющий момент двигателем-маховиком. Для создания разгрузочного момента двигателя-маховика необходимо включить двигатели ориентации (в способе прототипе - ЭРД с отклоняемыми векторами тяги). Это приводит к снижению эффективности работы двигателей коррекции, так как часть топлива расходуется не на поступательное движение КА, а на формирование возмущающего момента. Кроме этого топливо расходуется для компенсации данного возмущающего момента. В результате увеличивается расход бортового запаса топлива и снижается срок активного существования КА в целом.
Двигатели коррекции, например, как в источниках [1] и [4], в большинстве случаев, расположены симметрично относительно оси КА, на которой находится фактический центр масс КА, поэтому, возможно при проведении коррекции использовать равнодействующую величину векторов их тяг. Но это также снижает эффективность их характеристик пропорционально величине угла между векторами их тяг. А в случае отказа одного из двух двигателей выполнение коррекции орбиты КА потребует компенсации значительного возмущающего момента.
Технической проблемой изобретения является снижение расхода бортовых запасов топлива при выполнении коррекции орбиты космического аппарата.
Эта техническая проблема решается за счет того, что при осуществлении способа управления движением космического аппарата, направления векторов тяги двигателей коррекции которого проходят через начальный центр масс космического аппарата, расположенный на оси космического аппарата, перпендикулярной плоскости, в которой расположены центры масс топливных баков, и совпадающей с осью узла захвата при его наличии, выдают предварительный импульс коррекции, определяют величину отклонения направления импульса коррекции от фактического центра масс космического аппарата, изменяют ее, как правило, уменьшая, перемещая фактический центр масс космического аппарата путем перераспределения топлива в баках космического аппарата за счет разности температур поверхностей баков и управления установленными нормально открытыми клапанами на их выходных магистралях; повторно выполняют выдачу предварительного импульса коррекции и определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата и, при удовлетворительном результате, выполняют плановую коррекцию орбиты космического аппарата; при этом, определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата проводят по изменению величины и направления возмущающего момента. Кроме того, определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата можно проводить по изменению величины и направления управляющего момента, при удовлетворительном результате его изменения создавать управляющий момент относительно заданной оси космического аппарата в заданном направлении. Перераспределение топлива в баках космического аппарата можно выполнять за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени соответственно.
В состав комплекса предлагаемого для решения технической проблемы входит, например, геостационарный космический аппарат с системой коррекции (например, на основе стационарных плазменных двигателей), включающей в себя двигатели коррекции, направления векторов тяги которых проходят через начальный центр масс космического аппарата, расположенный на оси космического аппарата, перпендикулярной плоскости, в которой расположены центры масс топливных баков и совпадающей с осью узла захвата. Баки топлива, например, ксенона оснащены датчиками давления и температуры. Далее по тексту рассматривается модель бака, топливо в котором, например, ксенон высокого давления, распределено равномерно по объему, с выработкой топлива положение центра масс бака относительно начального центра масс КА не меняется. На выходную магистраль каждого из баков устанавливают нормально открытые клапаны. При подаче электрического питания на соответствующие исполнительные элементы (приводы) клапаны закрываются, при отсутствии электрического питания на соответствующих исполнительных элементах - открываются. Данные по нормально открытым клапанам приведены, например, в источнике [8] - https://www.tehnology-pro.ru/normalno-otkrytyj-i-normalno-zakrytyj-klapany.htm. Управление системой коррекции, в том числе нормально открытыми клапанами, выполняют с помощью бортового программного обеспечения.
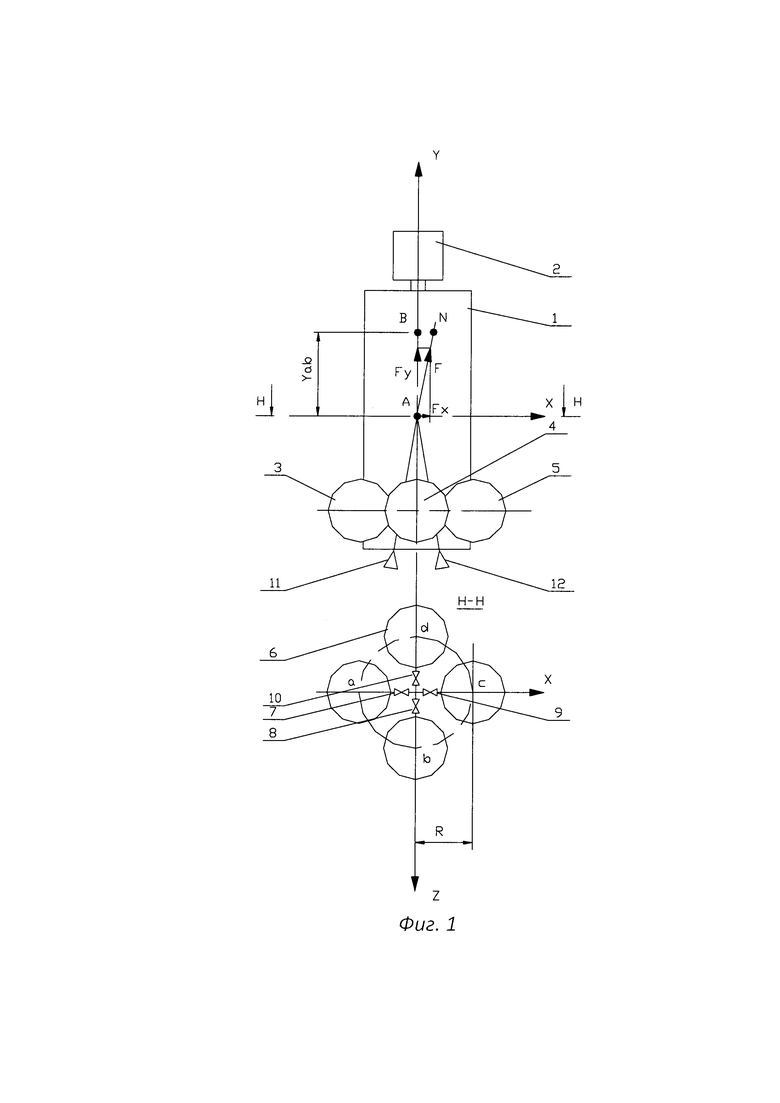
Суть изобретения поясняется графическим изображением - фиг. 1. На фиг. 1 показана схема комплекса, на основе которого реализуют предлагаемый способ управления движением космического аппарата. Комплекс представляет собой космический аппарат 1, в состав которого входят все системы, необходимые для его полноценного функционирования. Например, бортовой комплекс управления, включающий в себя бортовой цифровой вычислительный комплекс с программным обеспечением, системы коррекции, электропитания, ориентации и стабилизации, терморегулирования и т.п. Элементы, не имеющие прямого отношения к заявляемому способу, далее не рассматриваются. В состав системы коррекции данного КА входят топливные баки одинаковой конструкции 3, 4, 5, 6, центры масс которых - точки а, b, с, d размещены в плоскости, перпендикулярной оси КА, на которой размещен начальный (на начало эксплуатации) центр масс КА - точка А. В частном случае, соосно данной оси на корпусе КА установлен узел захвата 2. Каждый из топливных баков оснащен: заправочной горловиной, пироклапаном, датчиками температуры и давления (на схеме не показаны). Выходные штуцеры баков выведены в магистраль высокого давления, подсоединенную к блоку подачи ксенона (БПК), в состав которого входят редуктор и нормально закрытые электроклапаны (магистрали и БПК на рисунке не показаны). На выходных штуцерах баков устанавливают нормально открытые электроклапаны 7, 8, 9, 10. Магистраль низкого давления сообщена с двигателями коррекции 11 и 12, в состав которых входят нормально закрытые электроклапаны (на рисунке не показаны). Векторы тяги двигателей коррекции направлены через начальный центр масс КА - точку А. Оси стабилизации КА - X, Y и Z проходят также через точку А.
Пример осуществления способа управления движением космического аппарата.
В начале эксплуатации, когда топливные баки КА полностью заправлены, координаты центра масс КА, в соответствии с источником [9] (ru.solverbook.com/spravochnik/mexanika/statika/centr-tyazhesti-centr-mass/), определяются формулами (1), (2) и (3).



где:
Х0, Y0, Z0 - координаты начального центра масс КА (точка А);
mКА - масса КА без учета массы топлива;
xКА, yКА, zКА - координаты центра масс КА без учета массы топлива (на схеме точка не показана);
ma0, mb0, mc0, md0 - масса топлива в баках 3, 4, 5 и 6 соответственно. Предполагается, что на начало эксплуатации баки заправлены равными массами топлива;
ха, xb, xc, xd, ya, yb, yc, yd, za, zb, zc, zd; - координаты центров масс баков 3, 4, 5 и 6 соответственно.
Как показано в схеме, баки установлены симметрично относительно оси КА, проходящей через центр масс КА. Центры масс баков находятся на расстоянии R от данной оси с учетом знака.
На начальной стадии эксплуатации выполняют подрыв пироклапанов. Нормально открытые клапаны 7, 8, 9, 10 - открыты. Вследствие этого полости всех баков сообщаются с магистралью высокого давления (и через нее - между собой). Через редуктор и клапаны БПК топливо поступает к клапанам двигателей коррекции 11, 12. При включении двигателя коррекции открывают клапаны заданного двигателя. При работе двигателей коррекции выработка топлива выполняется одновременно из всех баков.
При равномерной выработке топлива его масса в баках уменьшается на равную величину Δm. По мере выработки топлива фактический центр масс смещается, например, из точки А в точку В. Координаты точки В определяются формулами (4), (5) и (6).



где:
XB, YB, ZB - координаты фактического центра масс КА на момент выработки из каждого бака топлива массой Δm (точка В).
Вектор тяги, например, двигателя коррекции 11 - F, направленный через начальный центр масс КА - точку А, в данном случае создает возмущающий момент. Величина данного момента определяется величиной составляющей Fx и плеча - расстояния между точками А и В. Как отмечено выше, при движении КА в этом случае возникает необходимость компенсации данного момента и связанных с этим затрат бортового запаса топлива.
Для обеспечения возможности выполнения коррекции орбиты КА одним двигателем коррекции в данном случае выполняют следующие действия. Фиксируют фактические значения масс топлива в баках, например, закрывают три из четырех нормально открытых клапанов, например, 8, 9 и 10. Выдают через заданный (к выполнению коррекции движения КА) двигатель коррекции предварительный (минимальный по продолжительности, но достаточный для регистрации возмущающего момента) импульс коррекции. С помощью средств системы ориентации определяют величину и направление возмущающего момента и соответствующего фактического отклонения направления импульса коррекции от фактического центра масс КА. Определяют положение фактического центра масс (точка В) и координаты точки N, в которую нужно переместить фактический центр масс КА для сведения к минимуму величины отклонения направления импульса коррекции от фактического центра масс (в данном примере рассмотрен частный случай расположения точки N в плоскости XOY. Перемещение фактического центра масс КА осуществляют, перераспределяя топливо в баках, управляя нормально открытыми клапанами 7, 8, 9 и 10.
Перераспределение топлива выполняют за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени соответственно (либо за счет разности температур, достигаемой с применением иных средств нагрева, например, электрических нагревателей). Разность температур поверхностей баков в этом случае может достигать порядка двухсот градусов. Процессом можно управлять от бортового комплекса управления с использованием бортовых данных об орбитальном движении КА и его положении относительно Солнца и Земли, с контролем датчиков температуры и давления, установленных на каждом баке. Так, например, для перемещения фактического центра масс из точки В в точку N закрывают все четыре клапана, после чего выравнивают массы топлива в баках 4 и 6 путем открытия на определенное время клапанов 8 и 10 при близких по величине температурах этих баков. При этом после выравнивания массы топлива в баках 4, 6 клапаны 8, 10 закрывают. Затем, в период суток, когда температура бака 3 максимально превышает температуру бака 5, открывают клапаны 7 и 9, перемещая часть топлива из бака 3 в бак 5.
В результате фактический центр масс КА смещается от точки В к точке N. Координаты точки N определяются формулами (7), (8) и (9).



где:
XN, YN, ZN - координаты фактического центра масс КА на момент завершения перераспределения топлива из бака 3 в бак 5;
δma и δmc - масса топлива, перетекшего из бака 3, и масса топлива, поступившего в бак 5, соответственно. Для выражений 7, 8 и 9 предполагается, что эти массы равны друг другу.
После завершения перераспределения топлива три из четырех нормально открытых клапанов на входных штуцерах баков оставляют закрытыми (в данном примере - это клапаны 7, 8, 10). Расход топлива для выполнения сеанса коррекции, выполняют только из бака 5 через клапан 9. Повторно выполняют выдачу предварительного импульса коррекции, контролируют изменение величины возмущающего момента и, при удовлетворительном результате (достижение требуемой величины отклонения точки В от точки N, заданной эксплуатационной документацией) выполняют плановую коррекцию орбиты космического аппарата. В зависимости от результатов повторной выдачи предварительного импульса коррекции, для проведения плановой коррекции орбиты космического аппарата выбирают бак, из которого будет отбираться топливо, исходя из того, что при проведении плановой коррекции должно происходить дальнейшее уменьшение величины отклонения вектора тяги включенного двигателя от фактического положения центра масс КА, полученного после перераспределения топлива - точки N.
Перемещение фактического центра масс КА может происходить как по оси КА, так и в радиальном направлении от нее, например, в случае присоединения к сервисному КА через узел захвата 2 дополнительной массы в виде объекта космического мусора. При существенных перемещениях фактического центра масс, когда описанным выше методом коррекцию одним двигателем коррекции обеспечить невозможно, можно использовать два двигателя коррекции. В данном случае возможно путем перераспределения топлива в баках «вернуть» положение фактического центра масс как можно ближе к оси КА, соосно которой направлена равнодействующая векторов тяги двигателей коррекции.
Возможности изменения величины отклонения направления вектора импульса коррекции от фактического центра масс КА могут быть использованы при реализации резервных алгоритмов управления, например, при отказе одного из двигателей ориентации относительно осей стабилизации X и Z. В этом случае заявляемый способ позволяет создавать управляющий момент по требуемому направлению за счет изменения положения фактического центра масс КА и последующей выдачи импульса коррекции, формирующего управляющий момент относительно заданной оси космического аппарата в заданном направлении.
В части примеров реализации следует отметить следующее.
Комплекс, предлагаемый для решения технической проблемы, может быть создан на основе известных типов КА (и их комплектующих), изготавливаемых, например, АО «ИСС» имени академика М.Ф. Решетнева. Данные по КА изготовления АО «ИСС» приведены, например, в источнике [10] (АО «Информационные спутниковые системы» имени академика М.Ф. Решетнева». Более 55 лет в космосе, http://raaks.ru/docs/doc20170315_019.pdf).
Технические результаты, получаемые при реализации данного технического решения - это определение и контроль величин и направлений возмущающего и управляющего моментов; определение необходимых действий по управлению движением КА; изменение величины отклонения направления вектора импульса коррекции от фактического центра масс КА путем перераспределения топлива в баках космического аппарата за счет разности температур поверхностей баков и управления установленными нормально открытыми клапанами на их выходных магистралях, преимущественно за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени, соответственно. Совокупность технических результатов позволяет выполнять коррекцию орбиты космического аппарата с минимальными затратами топлива на компенсацию возмущающих моментов и расширяет выбор резервных алгоритмов функционирования при отказах элементов двигательных систем КА и в сервисных космических аппаратах, имеющих в своем составе узел захвата объектов космического мусора. Перераспределение топлива в баках космического аппарата за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени соответственно, позволяет управлять положением центра масс КА без усложнения его конструкции и не требует увеличения его массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СЕРВИСНОГО КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2714475C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1995 |
|
RU2115008C1 |
| УСТРОЙСТВО ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2004 |
|
RU2271966C2 |
| СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568960C1 |
| КОСМИЧЕСКИЙ АППАРАТ С ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ МАЛОЙ ТЯГИ | 2001 |
|
RU2223893C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РАСПОЛОЖЕННЫХ ПОД УГЛАМИ К ОСЯМ СВЯЗАННОГО БАЗИСА РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2341418C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2711819C2 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
Изобретение относится к космической технике, к управлению движением космических аппаратов (КА). Изобретение может быть использовано для изменения (уменьшения) величины отклонения направления импульса коррекции от фактического центра масс КА. Определяют и контролируют величины и направления возмущающего и управляющего моментов. Определяют необходимые действия по управлению движением КА. Изменяют величины отклонения направления вектора импульса коррекции от фактического центра масс КА путем перераспределения топлива в баках космического аппарата за счет разности температур поверхностей баков и управляют установленными нормально открытыми клапанами на их выходных магистралях, преимущественно за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени, соответственно. Снижается расход бортовых запасов топлива при выполнении коррекции орбиты космического аппарата. 2 з.п. ф-лы, 1 ил.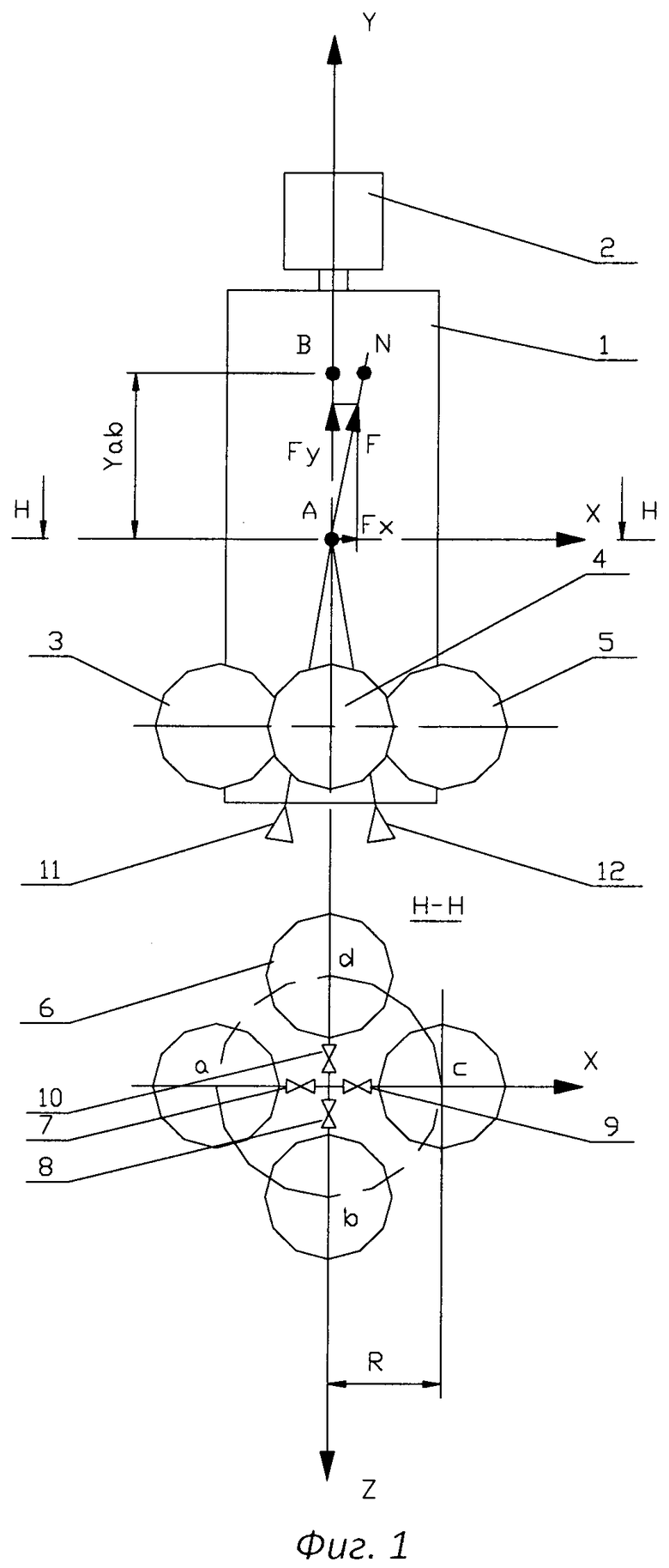
1. Способ управления движением космического аппарата, направления векторов тяги двигателей коррекции которого проходят через начальный центр масс космического аппарата, расположенный на оси космического аппарата, перпендикулярной плоскости, в которой расположены центры масс топливных баков, и совпадающей с осью узла захвата при его наличии, отличающийся тем, что выдают предварительный импульс коррекции, определяют величину отклонения направления импульса коррекции от фактического центра масс космического аппарата, изменяют ее, как правило, уменьшая, перемещая фактический центр масс космического аппарата путем перераспределения топлива в баках космического аппарата за счет разности температур поверхностей баков и управления установленными нормально открытыми клапанами на их выходных магистралях; повторно выполняют выдачу предварительного импульса коррекции и определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата и, при удовлетворительном результате, выполняют плановую коррекцию орбиты космического аппарата; при этом, определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата проводят по изменению величины и направления возмущающего момента.
2. Способ управления движением космического аппарата по п. 1, отличающийся тем, что определение величины отклонения направления импульса коррекции от фактического центра масс космического аппарата проводят по изменению величины и направления управляющего момента, и при удовлетворительном результате создают управляющий момент относительно заданной оси космического аппарата в заданном направлении.
3. Способ управления движением космического аппарата по п. 1 или 2, отличающийся тем, что перераспределение топлива в баках космического аппарата выполняют за счет суточной разницы температур поверхностей баков, прогреваемых Солнцем и находящихся в тени соответственно.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1995 |
|
RU2115008C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2001 |
|
RU2191721C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| Электрический насос | 1949 |
|
SU87407A1 |
| МОДУЛЬНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА МАЛОЙ ТЯГИ | 2014 |
|
RU2563923C1 |

