Изобретение относится к области автоматики и может быть использовано для регулирования механического усилия смещения перемещаемого узла относительно его стопора.
Известен способ [1], в котором регулирование механического усилия смещения перемещаемого узла осуществляют за счет использования электронных схем и датчиков. Недостатком известного способа является сложность управляющей электронной схемы, ее низкая надежность и необходимость наличия источника электропитания.
Наиболее близким является выбранный в качестве прототипа способ [2], в котором регулирование механического усилия смещения перемещаемого узла осуществляют за счет изменения усилия прижатия к нему механического стопора, чем обеспечивается регулирование величины фрикционной силы, возникающей в зоне их контактирующих поверхностей, имеющих относительно продольных осей постоянную кривизну, например конусную или сферическую. Недостатком такого способа является низкая точность регулировки усилия смещения и его нестабильность.
Целью изобретения является повышение точности и стабильности регулирования механического усилия смещения.
Указанная цель достигается тем, что в предлагаемом способе регулирования механического усилия смещения перемещаемого узла относительно его стопора, заключающемся в изменении величины фрикционной силы, возникающей в зоне их контактирующих поверхностей, изменение величины фрикционной силы осуществляют изменением угла давления контактирующих поверхностей. В частности, изменение угла давления контактирующих поверхностей обеспечивают выполнением их с переменной криволинейностью.
Благодаря этому появляются:
- возможность регулирования величины фрикционной силы за счет изменения угла давления контактирующих поверхностей перемещаемого узла и его стопора;
- возможность изменения угла давления в плоскости, параллельной оси стопора и/или в плоскости, параллельной оси перемещения узла;
- возможность изменения угла давления в процессе смещения.
Трансформация усилия за счет изменения величины угла давления обеспечивает стабильность усилия смещения перемещаемого узла, широкий диапазон регулирования величины этого усилия по заданному закону, возможности раздельного регулирования усилия и релейности характеристик как прямого, так и обратного смещения перемещаемого узла.
Предлагаемый способ регулирования механического усилия смещения иллюстрирован чертежом.
На чертеже представлена схема пневматического выключателя управления, содержащего заключенный в корпусе 1 перемещаемый поршень 2, уплотненный резиновый манжетой 3, шток 4 с насаженной гильзой 5. Передняя 6 и задняя 7 рабочие кромки гильзы 5 имеют гиперболоидную форму. Стопоры прямого 8 и обратного 9 смещений нагружены пружинами 10. Через гильзу 5 на поршень 2 действует пружина 11, размещенная в стакане 12. Кольцевая выточка 13 гильзы 5 при прямом или обратном смещении перемещаемого узла, через рычаг 14, передает усилие на соответствующее переключение исполнительного механизма (на чертеже не показан). Стопоры имеют активную поверхность 15, выполненную в виде коноида (пространственного тела типа конуса с переменным по периметру углом профиля, плавно изменяющимся в некотором диапазоне от заданной минимальной его величины до заданной максимальной). На образующих стопоров выполнены выступы 16, а на внутренних поверхностях стопорных втулок 17 имеются выемки 18 под выступы 16, что позволяет фиксировать различные величины угла профиля коноида стопора в плоскости, проходящей через продольные оси гильзы и стопора.
Изменение угла давления контактирующих поверхностей достигается изменением угла профиля коноида в результате поворота стопора 8 - перестановкой выступов 16 по выемкам 18. Для движения стопора 8, освобождающего гильзу 5, необходимо преодолеть силу, являющуюся суммой силы трения в контакте стопора с передней рабочей кромкой 6 гильзы 5 и усилия от пружины 10, прижимающей стопор к гильзе, а нормальная сила и сила трения зависят от величины угла профиля коноида. Вот почему легко показать, что силы компенсируются вполне определенным изменением угла профиля коноида.
Расчеты показывают, что рациональный диапазон изменения угла коноида стопора при повороте стопора в стопорной втулке лежит в пределах от 10 до 85o. Этот диапазон обеспечивает независимость и постоянство усилия отжатия стопора при необходимости изменения уставки перемещаемого узла в широких пределах. Компенсация изменения усилия возвращающей пружины 11 в процессе смещения перемещаемого узла обеспечена изменением угла профиля рабочей кромки гильзы при выполнении ее поверхности в виде гиперболоида.
Достижение цели основного назначения данного решения может быть дополнено обеспечением релейности характеристики смещения перемещаемого узла (за счет подбора параметров прямого и обратного смещений перемещаемого узла) и повышением износостойкости контактирующих поверхностей пары гильза - стопор (выполнением их с переменной криволинейностью взаимно выпукло-вогнутыми).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЕЧНЫЙ КЛЮЧ | 1993 |
|
RU2060871C1 |
| СПОСОБ БЛОКИРОВАНИЯ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2014 |
|
RU2553498C1 |
| СПОСОБ ДЕЙСТВИЯ ФИКСИРУЮЩЕГО МЕХАНИЗМА СИЛОВОГО ПРИВОДА | 2007 |
|
RU2349479C2 |
| СПОСОБ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2002 |
|
RU2235653C2 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2012 |
|
RU2509015C1 |
| СПОСОБ ОЦЕНКИ ВНЕШНИХ И ВНУТРЕННИХ ПАРАМЕТРОВ УЗЛОВ ТРЕНИЯ ПРИ ИСПЫТАНИИ В СТЕНДОВЫХ УСЛОВИЯХ | 2015 |
|
RU2647338C2 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| СПОСОБ ПРЕКРАЩЕНИЯ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2302954C1 |
| ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2093704C1 |
| СПОСОБ КОНТРОЛЯ ДЕЙСТВИЯ СИЛОВОГО ПРИВОДА | 2006 |
|
RU2317903C1 |
Способ может быть использован в автоматике для регулирования механического усилия смещения перемещаемого узла относительно его стопора. Изменение фрикционной силы, которой регулируют усилие смещения, осуществляют изменением угла давления контактирующих поверхностей, которое в свою очередь обеспечивают выполнением контактирующих поверхностей с переменной криволинейностью. 1 з.п. ф-лы, 1 ил.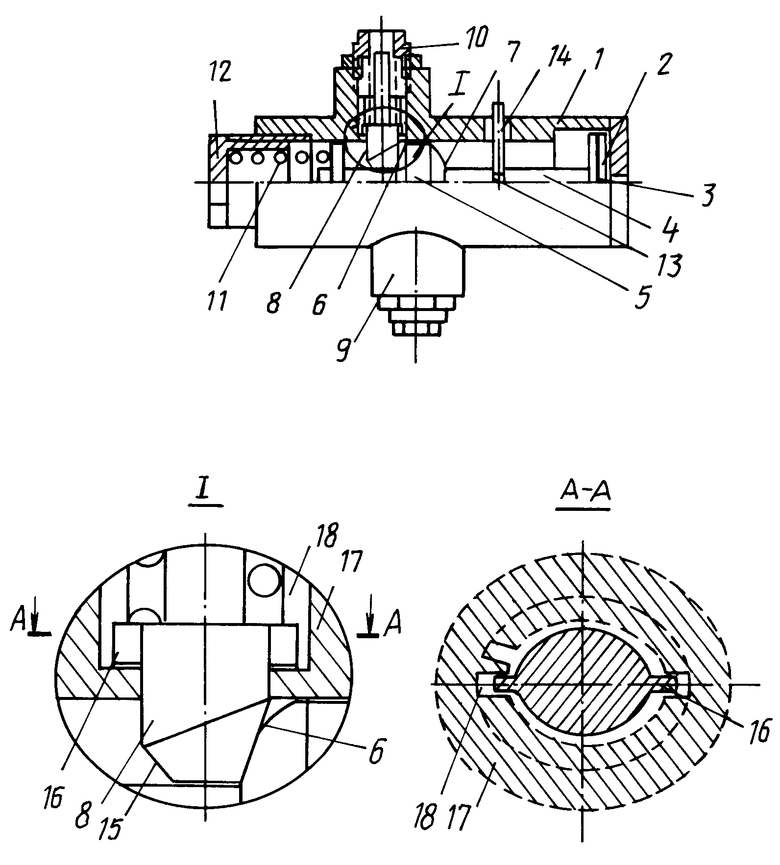
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1185317, G 05 D 15/01, B 24 B 39/00, 1985 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Иноземцев В.Г., Казаринов В.М, Ясенцев В.Ф | |||
| Автоматические тормо за | |||
| У чебник для вузов ж.-д | |||
| транспорта | |||
| - М.: Транспорт, 1981, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
