Область техники, к которой относится изобретение.
Изобретение относится к силовым приводам, главным образом пневмогидравлического типа, для технических конструкций, преимущественно транспортных средств, а именно к автоматическим стояночным тормозам железнодорожного подвижного состава.
Уровень техники.
Известен сигнализатор отпуска тормозов [1, стр.249], который содержит размещенные в корпусе контакторный элемент и взаимодействующую с ним подпружиненную диафрагму, управляющую камеру которой сообщают с рабочей полостью тормозного цилиндра. Реализуемый в этом сигнализаторе способ контроля действия силового привода заключается в следующем. Используют фиксирующее звено (диафрагму), по факту смещения (прогиба) которого оценивают действие силового привода. Это смещение вызывают нормируемым уровнем избыточного давления употребляющегося рабочего тела (сжатого воздуха), которое наличествует в надлежащей полости силового привода (рабочей полости тормозного цилиндра). При этом требуемый для контроля нормируемый уровень избыточного давления употребляющегося рабочего тела предопределяют воздействием на фиксирующее звено (диафрагму) начального усилия, которое создают с помощью потенциальной энергии дополнительного упругого тела (пружины). Недостатком такого способа контроля действия силового привода является недостаточная надежность. Во первых, при изломе или релаксации пружины (снижении уровня или пропадании потенциальной энергии дополнительного упругого тела) прекращается возможность надлежащего контроля действия силового привода. Во-вторых, может иметь место ложный контроль прекращения действия силового привода при разрушении диафрагмы
Наиболее близким техническим решением является выключатель путевой [2, стр.37], содержащий контакторный элемент и взаимодействующий с ним подпружиненный рычаг с роликом. Реализуемый в этом устройстве способ контроля действия силового привода заключается в следующем. Контроль действия силового привода осуществляют констатацией факта передвижения его исполнительного органа на надлежащую величину. Этот факт устанавливают по инициируемому передвижением исполнительного органа силового привода смещению специального фиксирующего звена (рычага с роликом). При этом указанное смещение обеспечивают за счет воздействия на указанное звено усилия от реализации потенциальной энергии дополнительного упругого тела (пружины). Недостатком такого способа контроля действия силового привода является его недостаточная надежность, определяемая возможностью излома или релаксации пружины (снижение уровня или пропадание потенциальной энергии дополнительного упругого тела), что приводит к прекращению возможности надлежащего контроля действия силового привода.
Сущность изобретения.
Целью предложенного способа контроля действия силового привода является повышение его надежности.
Поставленная цель достигается следующим. Силовой привод пневмогидравлического типа содержит источник рабочего тела, управляющий и исполнительный органы. Действие силового привода и прекращение его действия контролируют с помощью, соответственно, прямого и возвратного смещений фиксирующего звена. Работу этого звена инициируют воздействием на него усилия, возникающего при реализации потенциальной энергии дополнительного упругого тела. Это воздействие осуществляют при возникновении надлежащего уровня избыточного давления использующегося для действия силового привода рабочего тела и надлежащих перемещений исполнительного органа.
Предлагаемый способ контроля действия силового привода отличается тем, что при действии силового привода прямое смещение фиксирующего звена инициируют воздействием на него усилия от реализации потенциальной энергией рабочего тела, которое используют для действия силового привода. При этом фиксирующее звено содержит шток, размещенный в корпусе-втулке, которую устанавливают в крышку цилиндра силового привода. Инициацией упомянутого усилия шток смещается и воздействует на контакторный элемент, включающий сигнализацию. После прекращения действия силового привода возвратное смещение штока инициируют воздействием на него усилия, возникающего при соответствующем передвижении исполнительного органа в отпускное положение. Возвратное смещение штока вызывает прекращение воздействия на контакторный элемент, что приводит к отключению сигнализации.
Заявляемое техническое решение соответствует критерию изобретения «Новизна» (N). Сопоставительный анализ заявляемого решения с прототипом показывает отличие заявляемого решение от известного, заключающееся в том, что необходимое для контроля действия силового привода смещение штока фиксирующего звена инициируют усилием, реализуемым потенциальной энергией использующегося в силовом приводе рабочего тела, а не усилием потенциальной энергии дополнительного упругого тела.
Заявляемое техническое решение соответствует критерию «Изобретательский уровень (IS). Так, сравнение заявляемого решения с известными в технике решениями показывает, что использование усилия от реализации потенциальной энергии избыточного уровня давления рабочего тела для воздействия на различного вида фиксирующие звенья широко известно. Однако их внедрение в предлагаемый способ контроля действия силового привода пневмогидравлического типа проявляет следующие новые свойства.
1. Обеспечивается достоверность контроля действия силового привода, достигаемая использованием применяющейся для работы силового привода потенциальной энергии уровня избыточного давления рабочего тела, которое инициирует усилие, воздействующее на фиксирующее звено. Этим исключается влияние на достоверность контроля вероятности возможного снижения или полного исчезновения инициирующего усилия, реализуемого потенциальной энергией дополнительного упругого тела (релаксация или излом пружины при ее использовании в качестве дополнительного упругого тела).
2. Обеспечивается стабильность вызывающего смещение штока фиксирующего звена инициирующего усилия за счет, практически, неизменных упругих свойств уровня избыточного давления рабочего тела. Этим исключается снижение (при использовании дополнительного упругого тела-пружины) вызывающего смещение штока фиксирующего звена инициирующего усилия, реализуемого потенциальной энергией дополнительного упругого тела-пружины, уровень которого существенно понижается от величины ее рабочего сжатия до величины предварительного сжатия.
3. Снижаются материалоемкость и габариты фиксирующего звена, для работы которого не требуется установка дополнительного упругого тела.
Заявляемое техническое решение соответствует критерию «Промышленная применимость» (IA), так как может быть использовано в силовых приводах пневмогидравлического типа различных технических конструкций (транспортные средства, грузоподъемные механизмы и проч.).
Перечень фигур чертежей.
Изобретение поясняется структурной схемой предлагаемого способа контроля действия силового привода пневмогидравлического типа и схемами работы устройства для его реализации.
На фиг.1, в качестве примера, представлена структурная схема заявляемого технического решения в применении для контроля действия автотормоза железнодорожного подвижного состава. Эта схема содержит: силовой привод 1 (автотормоз), включающий в себя управляющий орган 2 (например, воздухораспределитель), источник рабочего тела 3 (например, тормозную магистраль) и исполнительный орган 4 (например, тормозной цилиндр) и фиксирующее звено 5.
На фиг.2 в качестве примера представлена схема работы реализующего заявляемое техническое решение устройства при поездном положении автотормоза (в ситуации отсутствия действия силового привода), в котором для подвода используемого в силовом приводе рабочего тела применен полый шток фиксирующего звена. Представляемое в качестве примера устройство включает в себя шток 5 (фиксирующее звено), размещенный в корпусе-втулке 12. Корпус-втулка 12 устанавливается в заднюю крышку 8 тормозного цилиндра 9. Шток 5 (фиксирующее звено), уплотненный манжетами 11, при своем смещении взаимодействует с контакторным элементом 7 (например, микровыключателем) через шарик-толкатель 6. Корпус-втулка 12 и контакторная элемент 7 защищены от внешних воздействий кожухом 13.
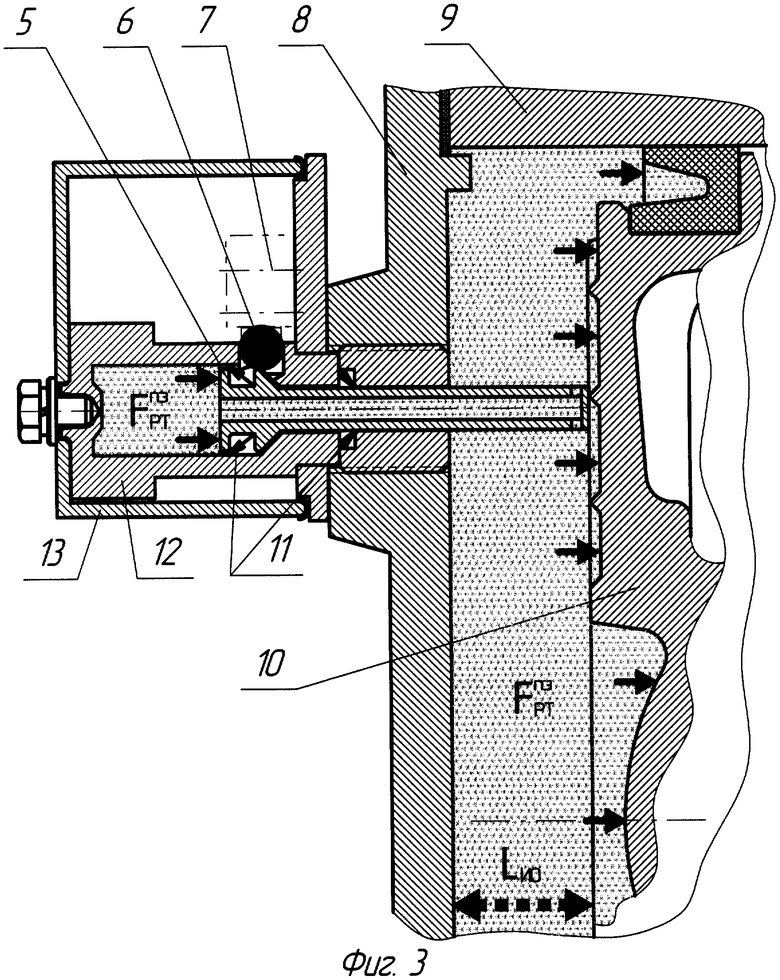
На фиг.3 приведена схема работы реализующего заявляемое техническое решение устройства при тормозном положении автотормоза (в ситуации действия силового привода). Штриховкой показана ситуация наполнения полостей и канала в полом штоке 5 (специальном фиксирующем звене) сжатым воздухом (рабочим телом).
На фиг.1 и фиг.3 изображены: сплошной стрелкой с индексом  -управляющее воздействие управляющего органа (воздухораспределителя), с индексом
-управляющее воздействие управляющего органа (воздухораспределителя), с индексом  - усилие от реализации потенциальной энергии рабочего тела (сжатого воздуха), с индексом
- усилие от реализации потенциальной энергии рабочего тела (сжатого воздуха), с индексом  - усилие от обратного передвижения исполнительного органа (поршня 10); прерывистой стрелкой с индексом Lиу - передвижение исполнительного органа (поршня 10).
- усилие от обратного передвижения исполнительного органа (поршня 10); прерывистой стрелкой с индексом Lиу - передвижение исполнительного органа (поршня 10).
Сведения, подтверждающие возможность осуществления изобретения.
Вариант осуществления заявляемого технического решения в применении для контроля действия автотормоза железнодорожного подвижного состава представлен схемами работы реализующего его устройства, в котором для подвода используемого в силовом приводе рабочего тела применен полый шток фиксирующего звена (фиг.2 и фиг.3).
В процессе повышения давления в тормозном цилиндре 9 при срабатывании воздухораспределителя (на фиг.2 и фиг.3 не показан) на торможение имеет место:
- воздействие на поршень 10 (исполнительный орган) уровня избыточного давления сжатого воздуха (усилие от реализации потенциальной энергии рабочего тела), наполняющего рабочую полость тормозного цилиндра 9 традиционным порядком;
- передвижение поршня 10 (исполнительного органа) из отпускного положения (показанного на фиг.2) в положение торможения (показанное на фиг.3) на расстояние LиО.
Одновременно, воздействующий на поршень 10 уровень избыточного давления сжатого воздуха через сквозной канал в полом штоке 5 поступает в управляющую камеру (на фиг.3 - слева от полого штока). Это приводит к появлению соответствующего усилия , воздействующего на полый шток 5 (фиксирующее звено). В результате этого воздействия полый шток 5 (фиксирующее звено) смещается вслед за поршнем 10 (исполнительным органом) на упомянутое расстояние LиО. Это смещение, в свою очередь, вызывает подпирание шарика-толкателя 6 и замыкание контакторного элемента (микровыключателя) 7, чем обеспечивается включение соответствующей сигнализации.
При срабатывании воздухораспределителя на отпуск, как известно, сжатый воздух (рабочее тело) из рабочей полости тормозного цилиндра 9 разрежается в атмосферу. Это приводит к прекращению воздействия усилия на поршень 10 (исполнительный орган) и полый шток 5 (фиксирующее звено). В результате поршень 10 (исполнительный орган) передвигается в отпускное положение традиционной работой его возвратной пружины (на фиг.2 и фиг.3 не показана). Усилие  от этого возвратного передвижения поршня 10 (исполнительного органа), воздействуя на торец полого штока 5 (фиксирующего звена), приводит к возвратному смещению последнего (см. фиг.2). В итоге подпирание полым штоком 5 (фиксирующим звеном) шарика-толкателя 6 прекращается, что приводит к размыканию контакторного элемента (микровыключателя) 7 и отключению соответствующей сигнализации.
от этого возвратного передвижения поршня 10 (исполнительного органа), воздействуя на торец полого штока 5 (фиксирующего звена), приводит к возвратному смещению последнего (см. фиг.2). В итоге подпирание полым штоком 5 (фиксирующим звеном) шарика-толкателя 6 прекращается, что приводит к размыканию контакторного элемента (микровыключателя) 7 и отключению соответствующей сигнализации.
Технический результат.
По сравнению с известным использование заявляемого технического решения повышает надежность контроля действия силового привода пневмогидравлического типа, которая обеспечивается:
- повышением достоверности контроля действия силового привода, достигаемой использованием применяющейся для работы силового привода потенциальной энергии уровня избыточного давления рабочего тела, которое одновременно инициирует усилие, воздействующее на фиксирующее звено. Этим исключается влияние на достоверность контроля вероятности возможного снижения или полного исчезновения инициирующего усилия, реализуемого потенциальной энергией дополнительного упругого тела (релаксация или излом пружины при ее использовании в качестве дополнительного упругого тела);
- увеличением стабильности инициирующего усилия, вызывающего смещение штока фиксирующего звена, за счет, практически, неизменных упругих свойств уровня избыточного давления рабочего тела. Этим исключается снижение (при использовании дополнительного упругого тела-пружины) вызывающего смещение штока фиксирующего звена инициирующего усилия, реализуемого потенциальной энергией дополнительного упругого тела-пружины, уровень которого существенно понижается при смещении штока фиксирующего звена от величины ее рабочего сжатия до величины предварительного сжатия;
- сокращением числа компонентов фиксирующего звена.
Одновременно снижаются материалоемкость и габариты фиксирующего звена, для работы которого не требуется использование дополнительного упругого тела (пружины).
Предлагаемый способ контроля действия силового привода пневмогидравлического типа обладает широкой применимостью в силовых приводах различных технических конструкций, в том числе, и на различных видах транспортных средств.
Источники информации
1. Иноземцев В.Г., Казаринов В.М., Ясенцев В.Ф. Автоматические тормоза. Учебник для вузов ж.-д. транспорта. - М.: Транспорт, 1981.
2. Автотормозное и пневматического оборудование подвижного состава рельсового транспорта. Каталог. - М.: Ассоциация АСТО, 2003.

Изобретение относится к области силовых приводов пневмогидравлического типа, в частности к автоматическим стояночным тормозам железнодорожного подвижного состава. Способ контроля действия силового привода, содержащего источник рабочего тела, управляющий и исполнительный органы, заключается в оценке фактов прямого и возвратного смещений фиксирующего звена при действии силового привода и прекращении его действия. Прямое и возвратное смещения фиксирующего звена инициируют воздействием на последнее реализуемого потенциальной энергией дополнительного упругого тела усилия. Воздействие осуществляют при возникновении надлежащего уровня избыточного давления рабочего тела, воздействующего на исполнительный орган и надлежащие перемещения последнего. При действии силового привода прямое смещение фиксирующего звена, включающего шток, размещенный в корпусе-втулке, установленной в крышке цилиндра силового привода, инициируют воздействием на шток усилия, реализуемого потенциальной энергией использующегося в силовом приводе рабочего тела, при котором шток смещается и воздействует на контакторный элемент с последующим включением сигнализации. При прекращении действия силового привода возвратное смещение штока инициируют усилием, воздействующим на него при соответствующем передвижении исполнительного органа в отпускное положение, при этом воздействие штока на контакторный элемент прекращается, что приводит к отключению сигнализации. Достигается повышение надежности. 3 ил.
Способ контроля действия силового привода пневмогидравлического типа, содержащего источник рабочего тела, управляющий и исполнительный органы, в котором действие силового привода и прекращение его действия оценивают фактами соответственно прямого и возвратного смещений фиксирующего звена, каковые инициируют воздействием на последнее реализуемого потенциальной энергией дополнительного упругого тела усилия, причем это воздействие осуществляют при возникновении надлежащего уровня избыточного давления рабочего тела, воздействующего на исполнительный орган и надлежащие перемещения последнего, отличающийся тем, что при действии силового привода прямое смещение фиксирующего звена, включающего шток, размещенный в корпусе-втулке, установленной в крышке цилиндра силового привода, инициируют воздействием на шток усилия, реализуемого потенциальной энергией использующегося в силовом приводе рабочего тела, при котором шток смещается и воздействует на контакторный элемент с последующим включением сигнализации, а при прекращении действия силового привода возвратное смещение штока инициируют усилием, воздействующим на него при соответствующем передвижении исполнительного органа в отпускное положение, при этом воздействие штока на контакторный элемент прекращается, что приводит к отключению сигнализации.
| Автотормозное и пневматическое оборудование подвижного состава рельсового транспорта | |||
| Каталог комплектующего оборудования | |||
| - М.: Ассоциация АСТО, 2003, с.37, рис.38 | |||
| Электрический сигнализатор отпуска тормозов | 1954 |
|
SU102309A1 |
| Сигнализатор отпуска тормозов | 1959 |
|
SU123188A1 |
| US 5918634 A, 06.07.1999 | |||
| US 5559281 A, 24.09.1996 | |||
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ | 2013 |
|
RU2533873C2 |

