Область техники, к которой относится изобретение
Изобретение относится к силовым приводам технических средств, преимущественно транспортных средств, а именно к автоматическим стояночным тормозам железнодорожного подвижного состава.
Известны технические средства, например система тормоза железнодорожного транспортного средства, содержащая пневматическую и механическую части. Пневматическая часть содержит воздушную тормозную магистраль, сообщенную с воздухораспределителем, сообщающимся, в свою очередь, с запасным резервуаром и тормозным цилиндром, работой воздухораспределителя в котором устанавливается надлежащее давление. Механическая часть включает в себя силовой привод, содержащий шток поршня тормозного цилиндра, шарнирно связанный с рычажной тормозной передачей, и фиксирующий механизм /1-4/. При нештатном торможении пневматической части (имеющем место при разрядке тормозной магистрали) с помощью фиксирующего механизма обеспечивают сохранение заторможенного состояния механической части (усилия упругой деформации рычажной тормозной передачи). Реализуемый при этом способ действия фиксирующего механизма заключается в том, что обеспечивают взаимное стопорение его узлов, шарнирно соединенных с каким-либо элементом силового привода и его рамой. Недостатком такого способа действия фиксирующего механизма является возможность снижения уровня сохраняемого им усилия упругой деформации рычажной тормозной передачи в результате возвратной выборки наличествующих зазоров в шарнирных соединениях при истощении пневматической части.
Наиболее близким техническим решением является стояночный тормоз железнодорожного транспортного средства /5/, содержащий фиксирующий механизм, снабженный подпружиненным опорным подшипником. Реализуемый в этом устройстве способ действия фиксирующего механизма заключается во введении упругого фрикционного взаимодействия опорного подшипника и поджимающей его пружины, чем сохраняют независящее от режима торможения пневматической части усилие упругой деформации рычажной тормозной передачи. Недостатком такого способа действия фиксирующего механизма также является возможность снижения уровня сохраняемого им усилия упругой деформации рычажной тормозной передачи в результате возвратной выборки наличествующих зазоров в шарнирных соединениях при истощении пневматической части.
Сущность изобретения
Целью предложенного способа является исключение влияния зазоров в шарнирных соединениях силового привода на сохраняемый фиксирующим механизмом уровень его упругой деформации.
Поставленная цель достигается следующим. Фиксирующий механизм силового привода содержит в числе прочего размещенный в его корпусе подвижный узел, взаимодействием которого с корпусом сохраняют усилие упругой деформации силового привода, созданной воздействием на него избыточного давления рабочего тела. Сохранение указанного усилия упругой деформации обеспечивают стопорением подвижного узла относительно его корпуса. Причем подвижный узел и корпус шарнирно сопрягают с механической частью силового привода и его рамой. В предлагаемом способе действия фиксирующего механизма его подвижный узел снабжают дополнительным приводом, на который воздействуют избыточным давлением рабочего тела, вызывающего работу силового привода.
Заявляемое техническое решение соответствует критерию изобретения «Новизна» (N). Так, сопоставительный анализ заявляемого решения с прототипом показывает отличия заявляемого решения от известного, заключающиеся в том, что:
1. Подвижный узел фиксирующего механизма снабжают дополнительным приводом.
2. На снабженный дополнительным приводом подвижный узел фиксирующего механизма воздействуют избыточным давлением вызывающего работу силового привода рабочего тела.
Заявляемое техническое решение соответствует критерию «Изобретательский уровень» (IS). Так, сравнение заявляемого решения с известными в технике решениями показывает, что снабжение подвижных узлов дополнительными приводами и воздействие на последние давлением рабочего тела широко известны. Однако их внедрение в предлагаемый способ действия фиксирующего механизма проявляет следующие новые свойства.
1. Оснащением подвижного узла фиксирующего механизма дополнительным приводом обеспечивает возможность добавочного на него силового воздействия.
2. Упомянутым добавочным силовым воздействием достигают возможности взаимных встречных смещений подвижного узла и корпуса фиксирующего механизма.
3. Такого рода смещениями реализуют выборку наличествующих зазоров в шарнирных соединениях фиксирующего механизма с силовым приводом и его рамой.
4. Выборкой наличествующих зазоров в шарнирных соединениях предупреждают возможность их возвратной выборки действием усилия упругой деформации силового привода в условиях нештатного прекращения воздействия на последний избыточного давления рабочего тела.
5. Исключением возможности указанной возвратной выборки зазоров в шарнирных соединениях обеспечивают повышение эффективности действия фиксирующего механизма по сохранению уровня упругой деформации силового привода.
Заявляемое техническое решение соответствует критерию «Промышленная применимость» (IA), так как может быть использовано в силовых приводах различных технических средств (транспортные средства, грузоподъемные механизмы и проч.).
Перечень фигур чертежей
Изобретение поясняется схемами, иллюстрирующими специфику использующегося и предлагаемого способа действия фиксирующего механизма силового привода.
На Фиг.1 представлена схема, иллюстрирующая использующийся способ действия фиксирующего механизма. Фиксирующий механизм содержит подвижный узел 8 (включающий в себя, например, винт 6 с конусной гайкой 4) и корпус 7 (например, с конусной образующей 5, которые составляют пары: «гайка-винт» - с несамотормозящейся резьбой и «гайка-стакан» - могущие заклиниваться при взаимном конусном фрикционном зацеплении). Фиксирующий механизм имеет шарниры 3 и 9, которые с помощью валиков (осей) 1 и 11 сопрягаются с шарниром 2 рамы силового привода и шарниром 10 элемента силового привода.
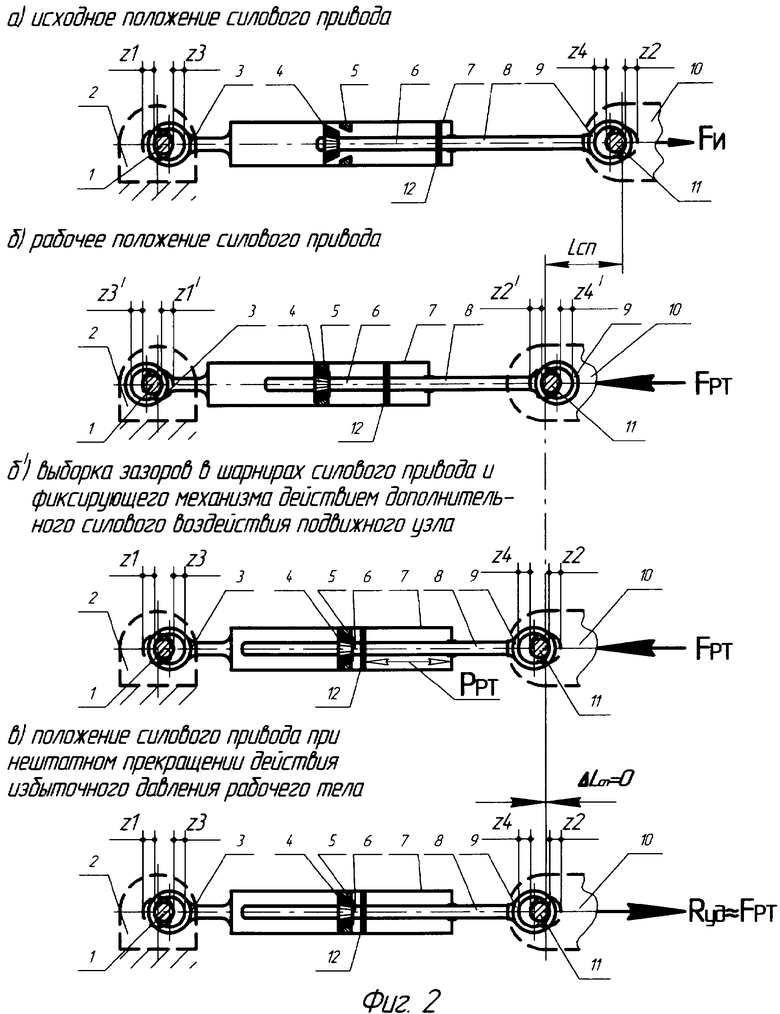
На Фиг.2 представлена схема, иллюстрирующая предлагаемый способ действия фиксирующего механизма, для реализации которого введен подвижный узел 8 (например, винт 6 снабжен дополнительным приводом 12, в качестве которого, например, возможен поршень), могущий воспринимать избыточное давление вызывающего работу силового привода рабочего тела.
На Фиг.1 и Фиг.2 показаны:
- стрелкой с индексом FИ - усилие, удерживающее силовой привод в исходном положении;
- стрелкой с индексом FРТ - усилие, возникающее в силовом приводе при действии на него избыточного давления рабочего тела;
- стрелкой с индексом RУД - усилие упругой деформации силового привода, сохраняемое фиксирующим механизмом при нештатном прекращении действия избыточного давления рабочего тела на силовой привод;
- величина смещения силового привода из исходного положения в рабочее - LСП при действии избыточного давления рабочего тела на силовой привод и возможная величина отхода силового привода - ΔLСП при нештатном прекращении действия избыточного давления рабочего тела;
- могущие иметь место зазоры: z1 - между валиком 1 и шарниром 2 рамы силового привода; z2 - между валиком 11 и шарниром 10 элемента силового привода; z3 и z4 - между валиками 1 и 11 и шарнирами 3 и 9 фиксирующего механизма.
Кроме того, на Фиг.2 стрелкой с индексом РРТ показано добавочное силовое воздействие дополнительного привода 12, вызываемое поступлением избыточного давления (вызывающего работу силового привода) рабочего тела.
Сведения, подтверждающие возможность осуществления изобретения
Осуществление заявляемого способа действия представлено как сопоставление с использующимся способом действия в применении к фиксирующему механизму автоматического стояночного тормоза железнодорожного подвижного состава.
При работе фиксирующего механизма, реализующего использующийся способ действия (фиг.1), имеет место следующее.
1. В исходном положении (фиг.1а) силового привода (рычажной тормозной передачи) на него действует исходное усилие FИ (например, действие усилия возвратной пружины поршня тормозного цилиндра), чем вызывается возникновение исходных зазоров:
1.1. z1 и z2 - между валиками (осями) 1 и 11 и шарнирами рамы силового привода 2 (например, рамы подвижной единицы) и элементом силового привода 10 (например, штоком тормозного цилиндра);
1.2. z3 и z4 - между валиками (осями) 1 и 11 и шарнирами 3 и 9 фиксирующего механизма.
2. В рабочем положении (фиг.1б) силового привода (рычажной тормозной передачи при торможении автотормоза) на элементе силового привода 10 (например, штоке тормозного цилиндра) действует усилие FРТ, как результат действия избыточного давления рабочего тела (давления, созданного в тормозном цилиндре работой автотормоза, при этом гайка 4 фиксирующего механизма входит в конусное фрикционное зацепление с конусной образующей 5). Действием усилия FРТ осуществляется прямое смещение подвижного узла 8 на величину LСП (одновременное прямое смещение винта 6, традиционно выталкивая гайку 4 из конусного фрикционного зацепления с конусной образующей 5 корпуса, вызывает навинчивание гайки 4 на винт 6 и последующее восстановление конусного фрикционного зацепления гайки 4 с конусной образующей 5 корпуса). При этом осуществляется прямая выборка исходных зазоров z1-z3 и z4-z2, приводящая к зеркальному их взаимному размещению z3'-z1' и z2'-z4'.
3. В ситуации нештатного прекращения действия избыточного давления рабочего тела (истощении тормозного цилиндра) возвратному смещению подвижного узла 8 препятствует действие фиксирующего механизма (традиционное заклинивание в конусном фрикционном зацеплении с конусной образующей 5 корпуса гайки 4 исключает возможность ее свинчивания с винта 6 и возвратное смещение последнего). Однако усилием упругой деформации силового привода (рычажной тормозной передачи) RУД (фиг.1 в) осуществляется возвратная выборка зазоров z3'-z1' и z2'-z4', приводящая к их первоначальному исходному размещению z1-z3 и z4-z2. В результате имеет место отход элемента силового привода 10 на величину ΔLСП=z1+z2+z3+z4, что предопределяет снижение сохраняемого фиксирующим механизмом уровня упругой деформации силового привода (рычажной тормозной передачи): RУД<FРТ.
При работе же фиксирующего механизма, реализующего предлагаемый способ действия (фиг.2), представленная на фиг.1в ситуация невозможна.
Возникает представленное на фиг.2б' дополнительное положение, при котором имеет место добавочное силовое воздействие дополнительного привода 12, вызываемое поступлением избыточного давления (вызывающего работу силового привода) рабочего тела. Это добавочное силовое воздействие РРТ приводит к взаимному встречному смещению корпуса 7 и подвижного узла 8. При этом корпус 7 смещается навстречу подвижному узлу 8 на величину выбираемых зазоров z3'-z1', а подвижный узел 8 смещается навстречу корпусу 7 на величину выбираемых зазоров z2'-z4' (одновременное взаимное встречное смещение винта 6 и конусной образующей 5 корпуса, традиционно выталкивая гайку 4 из конусного фрикционного зацепления с конусной образующей 5 корпуса, вызывает навинчивание гайки 4 на винт 6 и последующее восстановление конусного фрикционного зацепления гайки 4 с конусной образующей 5 корпуса). Такое смещение обеспечивает выборку возникших зеркально размещенных зазоров z3'-z1' и z2'-z4', приводящую к их первоначальному исходному размещению z1-z3 и z4-z2. В результате отход элемента силового привода 10 под действием усилия упругой деформации становится невозможным - ΔLСП=0, что предопределяет повышение эффективности работы фиксирующего механизма, предопределяющего сохранение практически неизменного уровня упругой деформации силового привода (рычажной тормозной передачи): RУД≈FРТ.
Технический результат
По сравнению с известным использование заявляемого технического решения обеспечивает повышение эффективности работы фиксирующего механизма силового привода.
Предлагаемый способ контроля действия силового привода обладает широкой применимостью в силовых приводах различных технических конструкций, в том числе и на различных видах транспортных средств.
Список использованных источников
1. Стояночный тормоз железнодорожного транспортного средства. Авторское свидетельство СССР №621603, Бюл. №32, 1978 г.
2. Автоматический стояночный тормоз железнодорожного транспортного средства. Авторское свидетельство СССР №701853, Бюл. №45, 1979 г.
3. Автоматический тормоз железнодорожного транспортного средства. Авторское свидетельство СССР №1481124, Бюл. №19, 1989 г.
4. Автоматический стояночный тормоз. Патент РФ №2002649, Бюл. №41-42, 1993 г.
5. Стояночный тормоз железнодорожного транспортного средства. Авторское свидетельство СССР №541709, Бюл. №1, 1977 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2002 |
|
RU2235653C2 |
| СПОСОБ БЛОКИРОВАНИЯ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2014 |
|
RU2553498C1 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2012 |
|
RU2509015C1 |
| СПОСОБ ПРЕКРАЩЕНИЯ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2302954C1 |
| СПОСОБ КОНТРОЛЯ ДЕЙСТВИЯ СИЛОВОГО ПРИВОДА | 2006 |
|
RU2317903C1 |
| СПОСОБ ПОВЫШЕНИЯ РАБОТОСПОСОБНОСТИ СТОЯНОЧНОГО ТОРМОЗА ПНЕВМОПРУЖИННОГО ТИПА | 2012 |
|
RU2511576C2 |
| СПОСОБ ДЕЙСТВИЯ СТОЯНОЧНОГО ТОРМОЗА | 2011 |
|
RU2457126C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА | 2010 |
|
RU2428334C1 |
| СПОСОБ ТОРМОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1994 |
|
RU2083399C1 |
| Автоматический тормоз железнодорожного транспортного средства | 1987 |
|
SU1481124A1 |
Изобретение относится к области силовых приводов технических средств и может быть использовано на железнодорожном подвижном составе, оборудованном автоматическим стояночным тормозом. Способ действия фиксирующего механизма силового привода, предназначенного для сохранения в нештатной ситуации усилия упругой деформации указанного привода при создании воздействия на него избыточного давления рабочего тела, достигается тем, что фиксирующий механизм содержит в числе прочего корпус с размещенным в нем подвижным узлом, шарнирно сопряженные с элементом силового привода и его рамой. Обеспечение упомянутого сохранения осуществляется стопорением подвижного узла относительно его корпуса. Подвижный узел снабжают дополнительным приводом, на который воздействуют вызывающим работу силового привода избыточным давлением рабочего тела, чем обеспечивают добавочное силовое воздействие на подвижный узел, в результате чего при его взаимных перемещениях с корпусом реализуют выборку зазоров в их шарнирных сопряжениях. Достигается исключение влияния зазоров в шарнирных соединениях силового привода на сохраняемый фиксирующим механизмом уровень его упругой деформации. 2 ил.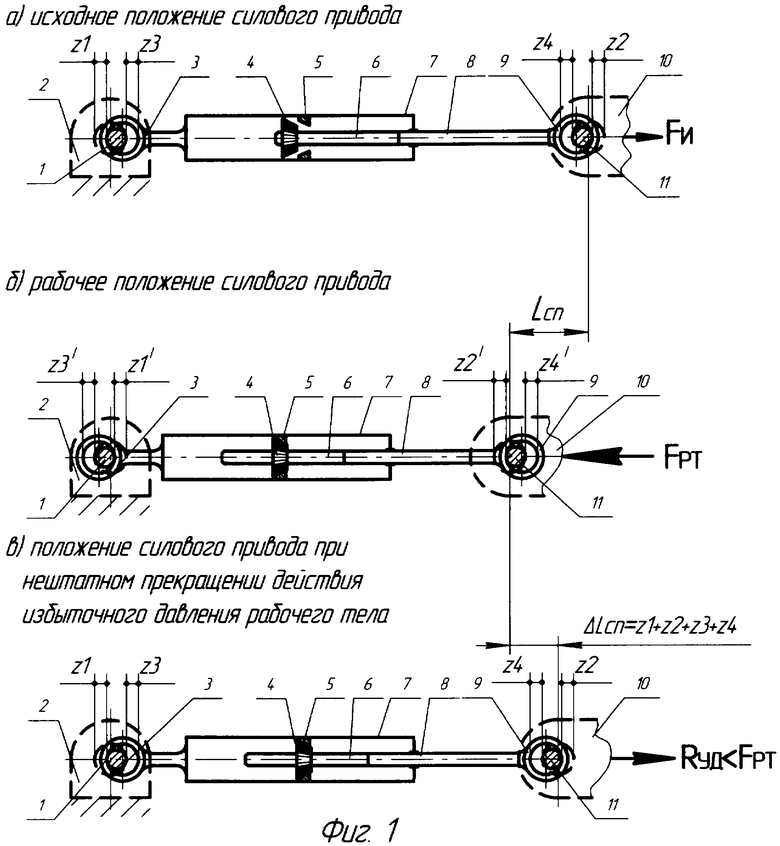
Способ действия фиксирующего механизма силового привода, предназначенного для сохранения в нештатной ситуации усилия упругой деформации указанного привода, которая создается воздействием на него избыточного давления рабочего тела, причем фиксирующий механизм содержит в числе прочего корпус с размещенным в нем подвижным узлом, шарнирно сопряженные с элементом силового привода и его рамой, а для обеспечения упомянутого сохранения осуществляют стопорение подвижного узла относительно его корпуса, отличающийся тем, что подвижный узел снабжают дополнительным приводом, на который воздействуют вызывающим работу силового привода избыточным давлением рабочего тела, чем обеспечивают добавочное силовое воздействие на подвижный узел, в результате чего при его взаимных перемещениях с корпусом реализуют выборку зазоров в их шарнирных сопряжениях.
| Стояночный тормоз железнодорожного транспортного средства | 1975 |
|
SU541709A1 |
| ГЛАВНЫЙ ТОРМОЗНОЙ ТАНДЕМ-ЦИЛИНДР | 0 |
|
SU309494A1 |
| Устройство для определения координат объекта | 1987 |
|
SU1538050A1 |
| Автоматический стояночный тормоз | 1991 |
|
RU2002649C1 |
| «Автотормозное и пневматическое оборудование подвижного состава рельсового транспорта» | |||
| Каталог комплектующего оборудования | |||
| - М.: Ассоциация АСТО, 2003, с.43 | |||
| US 6761253 А, 13.07.2004 | |||
| Измерительная микропипетка | 1984 |
|
SU1204254A1 |

