Изобретение относится к устройству определения задержки по времени сигнала от подвижной станции, принимаемого базовой станцией, задерживаемого радиоканалами при многолучевом распространении сигнала в режиме демодуляции сигнала канала связи обратной линии в приемнике сигнала базовой станции системы подвижной связи, использующей Северо-Американский способ многостанционного доступа с кодовым делением.
Согласно известному уровню техники задержка по времени при многолучевом распространении сигнала определяется для канала связи путем определения посредством процессора конкретного места наблюдения и конкретной задержки по времени из окна определения на оси задержки по времени для поиска сигнала, передаваемого подвижный станцией, который был задержан радиоканалом при многолучевом распространении сигнала, в конкретном месте наблюдения оси задержки по времени в режиме демодуляции сигнала канала связи обратной линии.
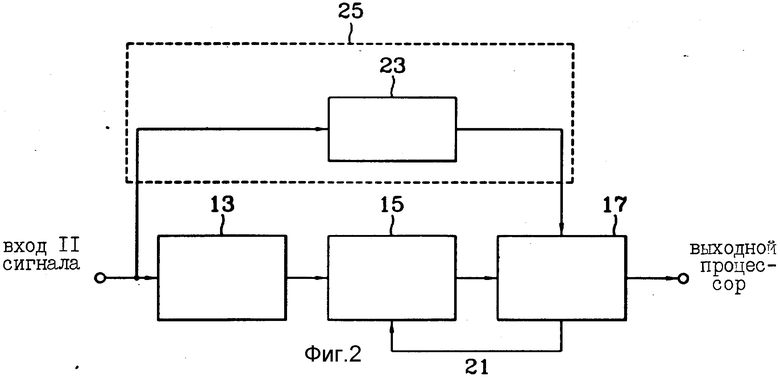
На фиг. 1 представлена блок-схема известного в технике устройства определения задержки по времени при многолучевом распространении сигнала. На фиг. 1 представлено устройство 3 определения задержки по времени и процессор 5 сигнала, который передает данные, определяющие задержку по времени 7, на устройство 3 определения задержки по времени и обрабатывает сигнал, переданный с выхода устройства 3 определения задержки по времени. Далее будет описана работа устройства определения задержки по времени при многолучевом распространении сигнала. Данные, определяющие задержку по времени 7, переданные с выхода процессора 5 сигналов, вводятся в устройство 3 определения задержки по времени. Устройство 3 определения задержки по времени выделяет величины корреляции из сигнала 1 и всех опорных сигналов и затем передает выделенные величины на процессор 5 сигналов. Сигнал 1, принятый от базовой станции с учетом определенной задержки по времени 7, и все опорные сигналы соответствуют каждому из всевозможных типов передаваемых от подвижной станции символов. Процессор 5 сигналов запоминает заданную максимальную величину корреляции, выбираемую из других величин корреляции, передаваемых от устройства 3 определения задержки по времени для получения средней величины. После этого процессор 5 сигналов сравнивает среднюю величину с заданной величиной. В соответствии с результатом сравнения процессор 5 сигналов проверяет, задерживается ли сигнал, переданный от подвижной станции радиоканалом при многолучевом распространении сигнала в конкретном месте наблюдения.
Однако, в соответствии с указанным способом, в случае проверки присутствия или отсутствия сигнала, задержанного радиоканалом при многолучевом распространении сигнала в конкретном месте оси задержки по времени, может возникнуть проблема, заключающаяся в том, что может возникнуть ложное определение, имеющее относительно более высокий уровень, чем вероятность, по сравнению с теоретически известной величиной для того же сигнала по отношению к коэффициенту шума. Это будет далее объясняться для двух случаев.
Прежде всего, один из случаев касается задержки сигнала в конкретном месте поиска. Величина корреляции получается среди всех опорных сигналов, соответствующих каждому из всевозможных типов передаваемых от подвижной станции символов и принимаемых от базовой станции сигналов. Эта величина корреляции является одной из величин корреляции, соответствующих принимаемому от базовой станции сигналу, совпадающему с сигналом, передаваемым от подвижной станции при их синхронизации. С другой стороны, в случае, когда не имеется задержанных сигналов в конкретной точке поиска, даже если принятый сигнал совпадает с опорным сигналом, предполагается, что величина корреляции мала на основании того факта, что синхронизация этих сигналов не совпадает друг с другом. Кроме этого, даже когда передаваемый от подвижной станции сигнал и принимаемый от базовой станции сигнал не совпадают друг с другом, полученная величина корреляции будет мала. Соответственно, в этом случае, если необходимо выбрать максимальную величину из полученных величин корреляции, то будет получена некоторая величина корреляции, для которой будет исключена только одна компонента, соответствующая компоненте шума, независимо от величины компоненты сигнала.
В этот момент полученная величина корреляции определяется наибольшим значением величины из диапазона, определяемого величиной корреляции между опорным сигналом и сигналом шума. Далее, теоретически предполагается, что получаемая величина корреляции достаточно велика по сравнению с величиной корреляции, получаемой для принимаемого сигнала и опорного сигнала в ситуации, когда передаваемый от подвижной станции сигнал принимается без искажений.
Другими словами, даже когда сигнал не задерживается для конкретного места наблюдения, и компонента сигнала задержки определяется в соответствии с ранее известным в технике способом, то имеется большая вероятность ошибочного решения, что в конкретной, сравниваемой с данным сигналом опорной величине имеется компонента задержанного сигнала. В условиях такой высокой вероятности ошибочного решения значительно понижаются характеристики принимающей части базовой станции. А это может оказаться препятствием для использования полного объема системы подвижной связи, использующей способ многостанционного доступа с кодовым делением.
Целью изобретения является создание схемы, которая позволит улучшить все функции системы подвижной связи, использующей способ многостанционного доступа с кодовым делением путем уменьшения вероятности ошибочного решения во время определения, имеется ли какой-либо сигнал, задержанный каналом при многолучевом распространении сигнала, в конкретной точке наблюдения оси задержки по времени.
Другой целью изобретения является создание устройства определения задержки по времени, уменьшающего вероятность ошибочного решения, создаваемого во время выбора максимальной величины из известных величин корреляции, путем поиска передаваемого от подвижной станции символа и дальнейшего определения величины корреляции между опорным сигналом, который соответствует переданному символу, и принимаемым от базовой станции сигналом.
Поставленная цель достигается тем, что устройство определения задержки по времени при многолучевом распространении сигнала в режиме демодуляции сигнала канала связи обратной линии системы подвижной связи, использующей способ многостанционного доступа с кодовым делением, содержит буфер выборок, для хранения принятых антенной сигналов базовой станции в форме выборок, устройство определения задержки по времени для получения величины корреляции между сигналом, принимаемым в конкретной точке наблюдения, определенной буфером выборок, и опорным сигналом, соответствующим конкретному символу во время определения конкретного символа и конкретного места наблюдения посредством процессора сигналов, процессор сигналов для определения, имеется ли компонента сигнала в конкретном месте наблюдения с учетом среднего значения накопленных величин корреляции, переданных от устройства определения задержки по времени, а также многолучевой сумматор для определения символа, искомого устройством задержки по времени.
На фиг. 1 изображена блок-схема устройства определения задержки по времени при многолучевом распространении сигнала; на фиг. 2 - блок-схема устройства определения задержки по времени при многолучевом распространении сигнала.
На фиг. 2 представлен буфер 13 выборок, устройство 15 определения задержек по времени, многолучевой сумматор 23 и процессор 17 сигнала. Буфер 13 выборок хранит в качестве цифрового сигнала сигнал 11, принятый антенной базовой станции. Устройство 15 определения задержки по времени получает величину корреляции с конкретным опорным сигналом для конкретного места наблюдения оси задержки по времени путем использования сигнала буфера 13 выборок. Многолучевой сумматор 23 определяет символ сигнала, принимаемого в текущий момент от базовой станции. И процессор 17 сигнала выявляет и результат определения символа многолучевым сумматором, и конкретное время задержки в окне определения и возвращает полученный результат устройству определения задержки по времени по каналу 21 обратной связи для дальнейшего определения присутствия или отсутствия сигнала в конкретном месте наблюдения, указанного с учетом величины корреляции, полученной от устройства определения задержки по времени.
Работа предпочтительного варианта выполнения описана детально со ссылкой на фиг.2.
Сигнал 11, принятый антенной базовой станции, сохраняется в буфере выборок как цифровой сигнал. Работа многолучевого сумматора 23 начинается после приема сигнала, когда многолучевой сумматор 23 определяет символ входного сигнала. Определенный таким образом символ передается на устройство 15 определения задержки по времени по каналу 21 обратной связи от процессора 17 сигнала. Процессор 17 сигнала, кроме определенного символа, передает на устройство 15 определения задержки по времени конкретное место наблюдения, искомое устройством 15 определения задержки по времени по каналу 21 обратной связи. Устройство 15 определения задержки по времени получает величину корреляции между опорным сигналом, соответствующим символу, переданному от процессора 17 сигналов, и сигналом из буфера 13 выборок, который соответствует конкретному месту наблюдения, а затем передает полученную величину на процессор 17 сигналов. Процессор 17 сигналов определяет общее среднее значение величины корреляции, переданной от устройства 15 определения задержки по времени с учетом соответствующей задержки по времени, и сравнивает эту величину с конкретной опорной величиной для определения присутствия или отсутствия сигнала для конкретной задержки по времени. Многолучевой сумматор 23 определяет символ полученного в текущий момент сигнала параллельно с работой устройства 15 определения задержки по времени во время получения величины корреляции в устройстве 15 определения задержки по времени.
Как указывалось выше, в соответствии со способом определения принимаемого сигнала в конкретном месте наблюдения в окне определения оси задержки по времени путем выбора максимальной величины из величин корреляции устройства определения задержки по времени, часто может возникать проблема, связанная с высокой вероятностью ошибочного решения о присутствии некоторого сигнала, даже в ситуации, когда принимаемый сигнал отсутствует. Однако, предлагаемое изобретение предназначено для определения присутствия или отсутствия сигнала на основании величины корреляции между принимаемым сигналом и конкретным опорным сигналом путем использования буфера выборок, Соответственно, проблемы, существующие ранее в данной области техники, могут быть разрешены путем использования предлагаемого изобретения.
Изобретение относится к устройству определения задержки по времени при многолучевом распространении сигнала в режиме демодуляции сигнала канала связи обратной линии системы подвижной связи, использующей способ многостанционного доступа с кодовым делением. Устройство определения задержки по времени при многолучевом распространении сигнала содержит буфер выборок для хранения сигналов, принимаемых антенной базовой станции в форме выборок, устройство определения задержки по времени для получения величины корреляции между сигналом в конкретном месте наблюдения, определяемым буфером выборок, и опорным сигналом, который соответствует конкретному символу во время определения конкретного символа и конкретного места наблюдения посредством процессора сигналов, процессор сигналов, предназначенный для определения, имеется ли компонента сигнала в конкретном месте наблюдения с учетом общего среднего значения величин корреляции, принятых от устройства определения задержки по времени, и многолучевой сумматор для определения символа, который необходимо указать устройству задержки по времени. Достигаемым техническим результатом является уменьшение вероятности ошибочного решения во время определения, имеется ли какой-либо сигнал, задержанный каналом при многолучевом распространении сигнала, в конкретной точке наблюдения оси задержки по времени. 1 з.п. ф-лы, 2 ил.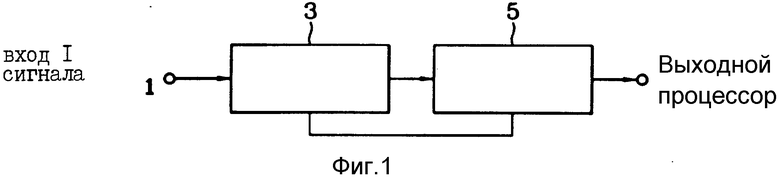
| US, патент, 5237586, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

