3 . 1500535 звездочки, которые могут поворачи- . ваться вокруг вертикальной оси, устанавливаясь в соответствии с поло- (Жением цепи, и транспортирующую звез- дочку, соединенную с электродвигателем. Управление камерой производится дистанционно с пульта управления.
причем на каретке установлен электронный блок с радиоприемником, позволяющий автоматически выполнять различные команды. Кроме того, имеется возможность регулирования скорости при отклонении каретки от вертикального положения. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| Устройство для моллирования и закалки стеклоизделий | 1980 |
|
SU981264A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Устройство для перегрузки паковок | 1990 |
|
SU1710475A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |
| Операторский кран с системой дистанционного управления камерой | 1973 |
|
SU487366A1 |
Изобретение предназначено для профессиональной киносъемки. Операторская дорога состоит из отрезков цепи 1, 2, 3 (фиг.1), которые соединены с помощью замков 4. Отрезки цепи крепятся на узлах подвеса 5. Повороты выполняются в виде жестких профилей 9, к которым прикрепляется соответствующий отрезок цепи 10. Каретка 11 содержит две несущие звездочки, которые могут поворачиваться вокруг вертикальной оси, устанавливаясь в соответствии с положением цепи, и транспортирующую звездочку, соединенную с электродвигателем. Управление камерой производится дистанционно с пульта управления, причем на каретке установлен электронный блок с радиоприемником, позволяющий автоматически выполнять различные команды. Кроме того, имеется возможность регулирования скорости при отклонении каретки от вертикального положения. 3 ил.
Изобретение относится к оптическому приборостроению и может быть использовано для дистанционного перемещения киносъемочной камеры по сложной траектории.
Цель изобретения - расширение диапазона перемещения кинокамеры в пространстве и расширение творческих возможностей кинооператора.
На фиг.1 показан участок дороги, общий вид; на фиг.2 - каретка; на фиг.З - пульт управления.
Начальная секция 1 цепи (фиг.1) связана с секцией 2 отрезком цепи 3 с помощью замков 4. В свою очередь отрезок 3 закреплен на промежуточном узле подвеса 5, связанном с опо- рами 6, растяжками 7 с.талрепами 8. Узел поворота содержит жесткий направляющий элемент 9 с закрепленным на нем отрезком цепи 10, связанным с участком дороги замками 4, и установ лен в свою очередь на узлах подвеса 5. Позиция 11 - каретка.
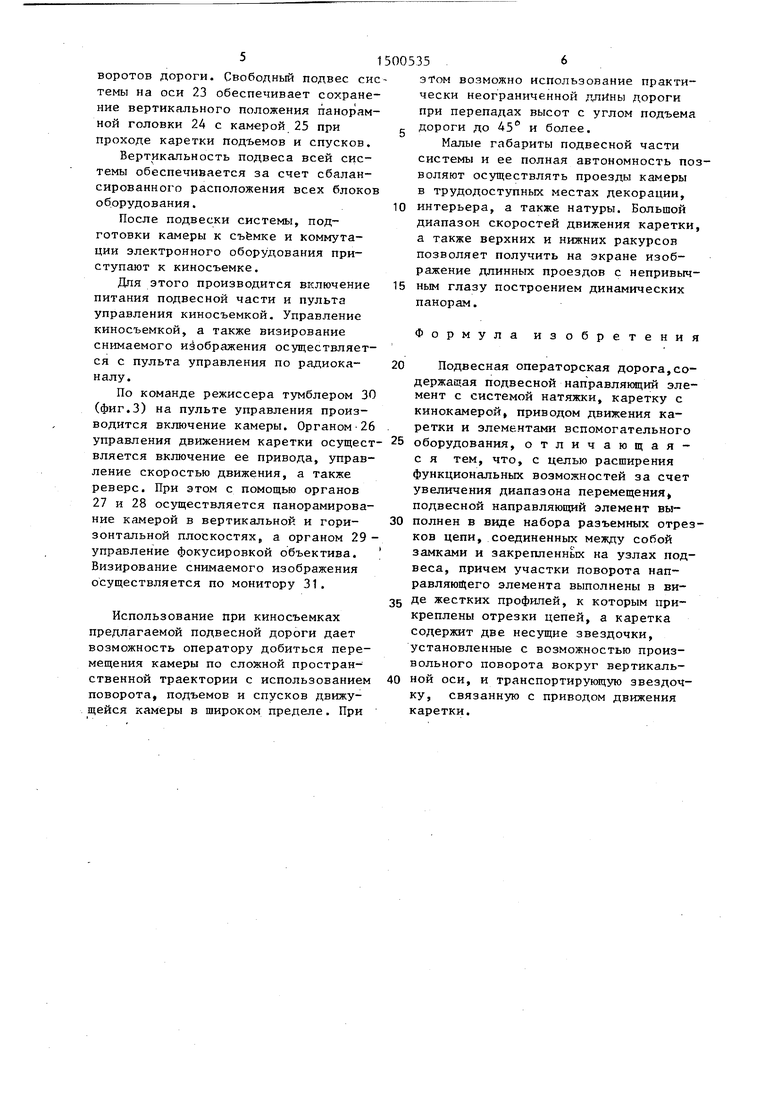
Каретка 11 (фиг.2) состоит из двух разъемных частей 11а и 116, связанных направляющими 12 и 13 и винтовой парой 14, 15. Верхняя часть 11а содержит пару опорных звездочек 16, установленных на радиальных сферических подшипниках 17, а нижняя .часть - транспортирующую звездочку 18 связанную с приводом 19. Блоки 20 аккумуляторного питания и блок 21 электронного управления системой установлены на поддоне 22, который свободно подвешен на оси 23, уста- новленной в нижней части каретки 116 Панорамная головка 24 (фиг.1), на которой установлена камера 25, соединена с поддоном 22.
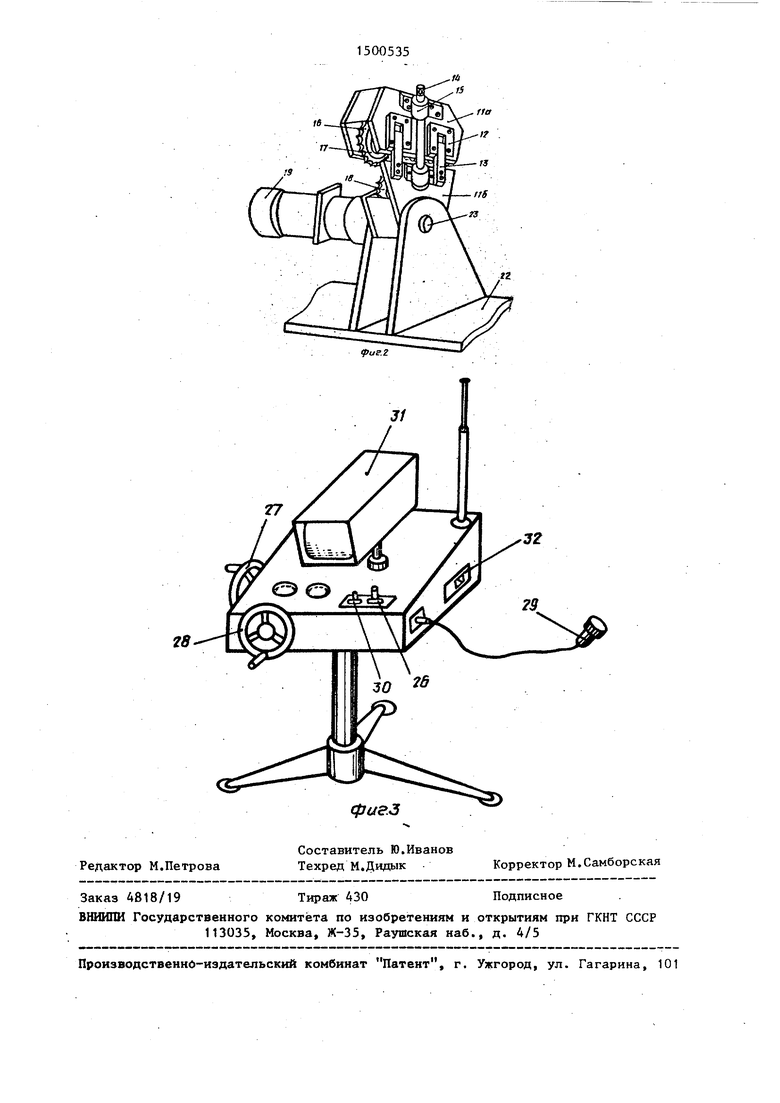
„ Пульт управления киносъемкой.
(фиг.З) содержит орган 26 управления движением каретки 11, органы 27 и 28 горизонтального и вертикального пано0
5
5
5
0 5 0
5
рамирования камерой, орган 29 управления фокусировкой объектива, тумблер 30 включения камеры, монитор 31 телевизионного визира и блок 32 питания.
Сборка дороги начинается с предварительной установки узлов подвеса 5 на растяжках 7 (фиг.1) и закрепления на их промежуточных опорах 6. Узлы поворота устанавливаются вместе с закрепленными на них узлами подвеса 5 за счет растяжки последних на опорах 6. При этом траекторию подъемов и спусков определяет взаимное распо- ложение узлов подвеса 5 в пространстве.
Затем устанавливается начальная секция 1 цепи нужной длины между начальной опорой и первым узлом подвеса 5, а потом остальные секции дороги между узлами подвеса. Для сок- рар;ения времени подбора секций .цепи iпроизводят предварительный замер ; расстояний между этими узлами и ;из набора различных по длине секций выбирают наиболее подходя-- ;щие по длине, при необходимости доращивая или сокращая их на малые отрезки стандартной длины, из которых набраны все секции цепи. После такой предварительной подвески секций начинают их нaтяжкз, и выравнивание растяжками 7 и талрепами 8, начиная от начальной секции цепи.
Установка каретки 11 на цепь производится при раздвинутых ее частях 11а и 116. Затем производится стяжка частей винтовой парой 14, 15 (фиг.2) до необходимого зазора между транспортирующей звездочкой 18 и цепью. При этом обеспечивается надежное
зацепление цепи с парой опорных звездочек 16, а радиально-сферические подшипники 17, на которых они установлены, дают возможность взаимного разворота звездочек при проходе по5
воротов дороги. Свободный подвес системы на оси 23 обеспечивает сохранение вертикального положения панорамной головки 2А с камерой 25 при проходе каретки подъемов и спусков.
Вертикальность подвеса всей системы обеспечивается за счет сбалансированного расположения всех блоков оборудования.
После подвески системы, подготовки камеры к съёмке и коммутации электронного оборудования приступают к киносъемке.
Для этого производится включение питания подвесной части и пульта управления киносъемкой. Управление киносъемкой, а также визирование снимаемого изображения осуществляется с пульта управления по радиоканалу.
По команде режиссера тумблером 30 (фиг.З) на пульте управления производится включение камеры. Органом-26 управления движением каретки осуществляется включение ее привода, управление скоростью движения, а также реверс. При этом с помощью органов 27 и 28 осуществляется панорамирование камерой в вертикальной и горизонтальной плоскостях, а органом 29 управление фокусировкой объектива. Визирование снимаемого изображения осуществляется по монитору 31.
Использование при киносъемках предлагаемой подвесной дороги дает возможность оператору добиться перемещения камеры по сложной пространственной траектории с использованием поворота, подъемов и спусков движущейся камеры в широком пределе. При
005356
этом возможно использование практически неограниченной длины дороги при перепадах высот с углом подъема
е дороги до 45 и более, ь
Малые габариты подвесной части
системы и ее полная автономность позволяют осуществлять проезды камеры в трудодоступных местах декорации,
10 интерьера, а также натуры. Большой диапазон скоростей движения каретки, а также верхних и нижних ракурсов позволяет получить на экране изображение длинных проездов с непривыч15 ным глазу построением динамических панорам.
Формула
и 3
обретения
Подвесная операторская дорога,содержащая подвесной направлякнций элемент с системой натяжки, каретку с кинокамерой, приводом движения каретки и элементами вспомогательного
оборудования, отличающая- с я тем, что, с целью расширения функциональных возможностей за счет увеличения диапазона перемещения, подвесной направляющий элемент выполнен в виде набора разъемных отрезков цепи, соединенных между собой замками и закрепленньгх на узлах подвеса, причем участки поворота направляющего элемента выполнены в виде жестких профилей, к которым прикреплены отрезки цепей, а каретка содержит две несущие звездочки, установленные с возможностью произвольного поворота вокруг вертйкальной оси, и транспортирующую звездочку, связанную с приводом движения каретки.
Г7
tfuS.Z
31
фиг.З
| Механизм управления перемещением киносъемочных аппаратов, НИКФИ, ЦООНТИ, МКБК, каталог, 1983 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
