Изобретение относится к кранам, а точнее к операторским кранам, которые используются для перемещения и разворота съемочной камеры во время кино- или телесъемок.
Известен операторский кран (см. журнал USA "In-Sync", Publications September 2001 "The international Trade Magazine" For TV Video & Motion Picture Equipment", стр.38) для ручного пространственного перемещения съемочной камеры, состоящий из стрелы, выполненной в виде механизма параллелограмма, расположенного в вертикальной плоскости с продольными и поперечными звеньями, причем заднее поперечное звено стрелы размещено на опоре, установленной на основании с возможностью поворота стрелы в вертикальной и горизонтальной плоскостях, съемочной камеры, размещенной на штативной головке, и противовеса на консоли, размещенных в передней и задней частях стрелы, кроме того, на опоре размещено сиденье для оператора.
Наиболее близким аналогом (прототипом) является операторский кран, раскрытый в RU 2041156 С1, 09.08.1995 и содержащий стрелу, выполненную в виде механизма параллелограмма, расположенного в вертикальной плоскости с продольными и поперечными звеньями, причем средняя часть стрелы размещена с возможностью поворота в вертикальной плоскости на опоре, установленной на основании, с возможностью поворота стрелы в горизонтальной плоскости, съемочную камеру и противовес, размещенные в передней и задней частях стрелы соответственно.
Упомянутые операторские краны имеют следующие недостатки:
- суженные возможности панорамирования съемочной камеры в пределах перемещения стрелы крана, то есть в вертикальной и горизонтальной плоскостях и при этом только при непосредственном воздействии оператора на штативную головку крана, что создает неудобства, связанные с подъемом и опусканием камеры в пределах физических возможностей оператора и ограничением угла панорамирования камеры;
- кроме того, плавность движения стрелы и панорамирование камеры обеспечивается только жидкостным трением штативной головки, что является явно недостаточным при использовании в съемках длиннофокусной оптики.
В основу изобретения поставлена задача по созданию такого операторского крана, в котором к передней, средней и задней частям механизма параллелограмма посредством переднего, среднего и заднего кронштейнов с помощью шарнирных соединений дополнительно присоединено, по крайней мере, одно продольное звено, параллельно расположенное к продольным звеньям упомянутого механизма параллелограмма с образованием при этом механизма второго параллелограмма, расположенного в плоскости, перпендикулярной плоскости упомянутого параллелограмма, при этом средний кронштейн размещен на опоре с возможностью поворота вокруг горизонтальной оси, проходящей через центр массы стрелы, причем эта ось является осью двух горизонтальных шарниров, соединяющих установленный на них средний кронштейн и находящуюся внутри него рамку, закрепленную на узле горизонтального поворота, размещенном на опоре, а в пространстве между продольными звеньями второго механизма параллелограмма и между средним и задним кронштейнами над основанием размещено операторское сиденье, средний и задний кронштейны снабжены рукоятками управления стрелой и панорамированием съемочной камеры, а на среднем кронштейне в рамке установлен видеомонитор, что позволяет за счет большого разноса массы движущихся частей стрелы, включая противовесы, обеспечить при движении большой суммарный момент инерции всей системы, что создает точность, легкость, мягкость и особую плавность движения при панорамировании съемочной камерой, даже при использовании длиннофокусной оптики, а копирование вертикального и горизонтального движений среднего кронштейна передним кронштейном обеспечивает возможность поворота съемочной камеры вокруг горизонтальной и вертикальной осей, и этим создает новые дополнительные возможности панорамирования снимаемого объекта как без движения стрелы, так и с ее движением, кроме того, большой диапазон и сочетание возможностей панорамирования обеспечивается конструктивными возможностями операторского крана, а простота, надежность конструкции и созданные удобства при эксплуатации крана разгружает оператора и предоставляет ему дополнительные творческие возможности для улучшения качества и ускорения процесса съемок объекта.
Техническим результатом, который может быть получен при работе предложенного изобретения, является значительное расширение диапазона панорамирования съемочной камеры при достижении большой плавности движения камеры и обеспечение удобства при управлении краном оператором при съемке.
Поставленная задача достигается использованием в операторском кране следующих доотличительных признаков: стрела, выполненная в виде механизма параллелограмма, расположенного в вертикальной плоскости с продольными и поперечными звеньями, средняя часть стрелы размещена с возможностью поворота в вертикальной плоскости на опоре, установленной на основании с возможностью поворота стрелы в горизонтальной плоскости, съемочной камеры и противовеса, размещенных в передней и задней частях стрелы соответственно, следующих отличительных признаков, достаточных во всех случаях, на которые распространяется испрашиваемый объем правовой охраны: к передней, средней и задней частям переднего, среднего и заднего кронштейнов с помощью шарнирных соединений дополнительно присоединено, по крайней мере, одно продольное звено, параллельно расположенное к продольным звеньям упомянутого механизма параллелограмма с образованием механизма второго параллелограмма, расположенного в плоскости, перпендикулярной плоскости упомянутого параллелограмма, при этом средний кронштейн размещен на опоре с возможностью поворота вокруг горизонтальной оси, проходящей через центр массы стрелы, а также признаков, характеризующих изобретение лишь в конкретных формах выполнения устройства: горизонтальная ось, проходящая через центр массы стрелы, является осью двух горизонтальных шарниров, соединяющих установленный на них средний кронштейн и находящуюся внутри него рамку, закрепленную на узле горизонтального поворота, размещенном на опоре, в пространстве между продольными звеньями механизма второго параллелограмма и между средним и задним кронштейнами над основанием размещено операторское сиденье, противовес состоит из двух наборов грузов, размещенных на двух направляющих, расположенных вдоль левого и правого краев заднего кронштейна, каждое шарнирное соединение стрелы, связывающее механизм параллелограмма с кронштейнами и дополнительно присоединенным продольным звеном, выполнено в виде пары горизонтального и вертикального шарниров, вертикальные шарниры парных двухосных шарнирных соединений, соединяющих механизм параллелограмма с кронштейнами и дополнительно присоединенным продольным звеном, закреплены на поперечных сторонах кронштейнов и, кроме того, эти шарниры являются поперечными звеньями механизма параллелограмма, средний и задний кронштейны снабжены рукоятками управления стрелой и панорамированием съемочной камеры, на среднем кронштейне в рамке установлен видеомонитор.
Изобретение поясняется чертежами.
На фиг.1 представлен общий вид операторского крана (аксонометрическая проекция);
на фиг.2 - вид по стрелке А на фиг.1 передней части операторского крана;
на фиг.3 - разрез А-А на фиг.1 вид средней части операторского крана;
на фиг.4 - вид по стрелке Б на фиг.1 задней части операторского крана;
на фиг.5 - вид операторского крана сверху при панорамировании камерой в горизонтальной плоскости;
на фиг.6 - вид операторского крана сбоку при панорамировании камерой в вертикальной плоскости.
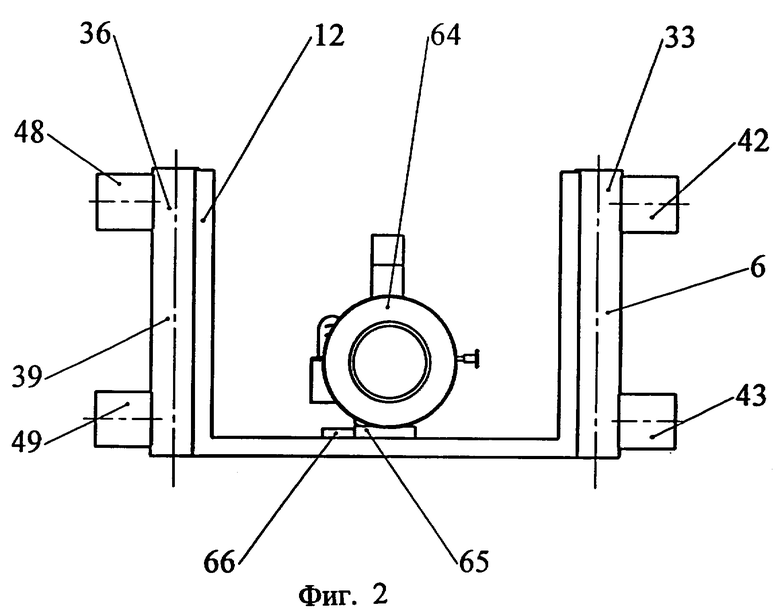
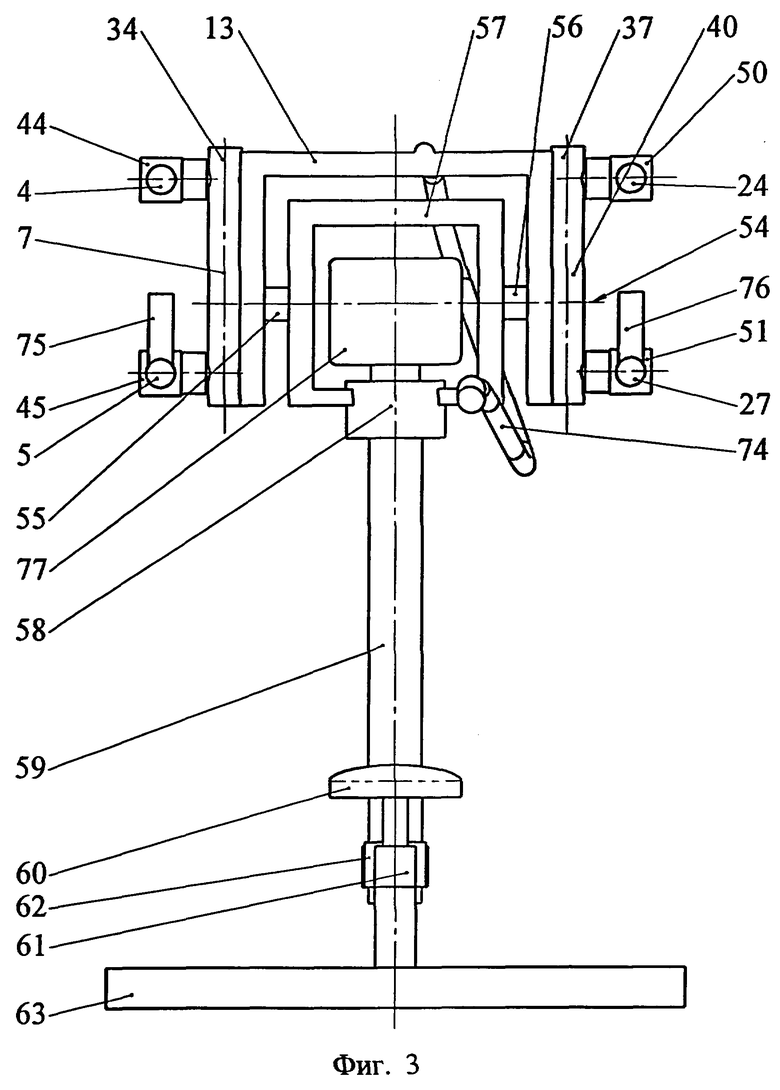
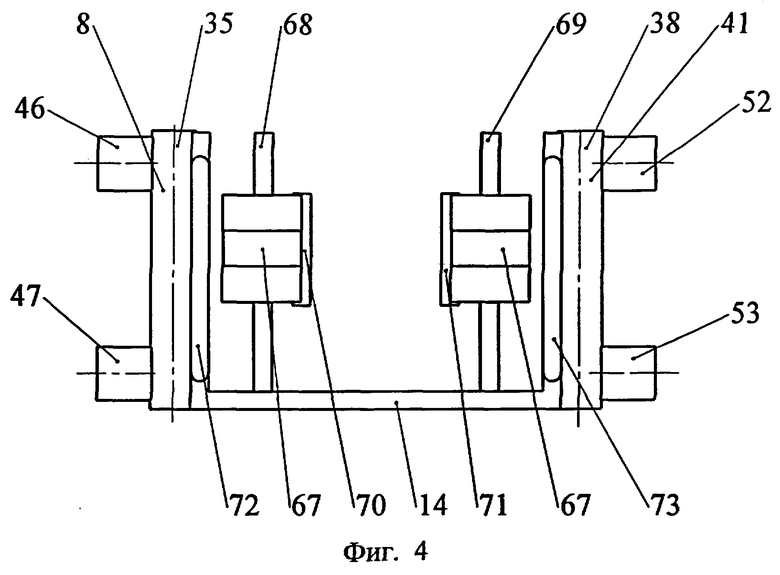
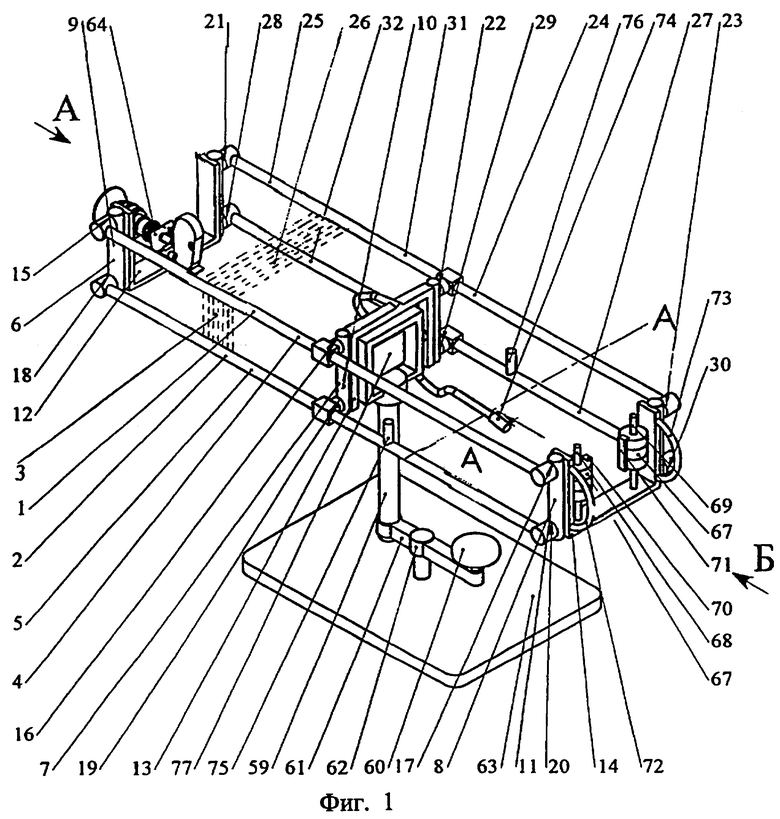
Операторский кран (фиг.1) состоит из стрелы 1, выполненной в виде механизма параллелограмма 2, расположенного в вертикальной плоскости 3 с продольными 4, 5 и поперечными 6, 7, 8 звеньями, к передней 9, средней 10 и задней 11 частям которого посредством переднего 12, среднего 13 и заднего 14 кронштейнов и с помощью двухосных шарнирных соединений 15, 16, 17, 18, 19, 20, 21, 22, 23 дополнительно присоединено, по крайней мере, одно продольное звено 24, параллельно расположенное к продольным звеньям 4, 5 механизма параллелограмма 2 с образованием при этом механизма второго параллелограмма 25, расположенного в плоскости 26, перпендикулярной вертикальной плоскости 3 механизма параллелограмма 2, а в случае присоединения еще одного продольного звена 27 с помощью дополнительных двухосных шарнирных соединений 28, 29, 30 образуется еще два механизма параллелограмма - механизм третьего параллелограмма 31, расположенный в плоскости, параллельной вертикальной плоскости 3 механизма параллелограмма 2, и в плоскости, перпендикулярной плоскости 26 механизма второго параллелограмма 25 и механизма четвертого параллелограмма 32, расположенного в плоскости, перпендикулярной плоскостям механизмов параллелограммов 2 и 31, и параллельного плоскости 26 механизма второго параллелограмма 25, причем каждое двухосное шарнирное соединение 15, 16, 17, 18, 19, 20, 21, 22, 23, 28, 29, 30, связывающее механизм параллелограмма 2 с кронштейнами 12, 13, 14 и продольными звеньями 24 и 27, выполнены в виде пары, состоящей из горизонтального и вертикального шарниров (фиг.2, 3, 4), где вертикальные шарниры 33, 34, 35, 36, 37 и 38 закреплены на поперечных сторонах кронштейнов 12, 13, 14.
Кроме того, вертикальные шарниры 33, 34, 35, 36, 37 и 38 одновременно являются поперечными звеньями 6, 7, 8, 39, 40, 41 механизмов параллелограммов 2 и 31, а горизонтальные шарниры 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53 в соединении с вертикальными шарнирами 33, 34, 35, 36, 37, 38 и с продольными звеньями 4, 5, 24, 27 (фиг.1 и 3) обеспечивают движение узлов стрелы 1 в горизонтальной и вертикальной плоскостях, при этом горизонтальная ось 54, проходящая через центр массы стрелы 1, является осью двух горизонтальных шарниров 55, 56, соединяющих установленный на них кронштейн 13 и находящуюся внутри него рамку 57, закрепленную на узле горизонтального поворота 58, в свою очередь размещенного на опоре 59, которая вместе с операторским сиденьем 60 размещена по разным концам кулисы 61, установленной с помощью механизма горизонтального поворота 62 в основании 63.
Причем операторское сиденье 60 размещено в пространстве между продольными звеньями 4 и 24 механизма второго параллелограмма 25 и между средним 13 и задним 14 кронштейнами; над основанием 63 съемочной камеры 64 (фиг.1 и 2), расположенной на переднем кронштейне 12 с возможностью подвижки по направляющей 65 с зажимом 66; противовеса 67 (фиг.1, 4), расположенного на максимальном расстоянии от центра массы стрелы 1 и состоящего из двух наборов грузов, размещенных на направляющих 68 и 69, расположенных вдоль левого и правого краев заднего кронштейна 14 и с зажимами 70, 71; ручек 72, 73 управления панорамированием съемочной камеры 64 и наклоном стрелы (фиг.1, 3, 4), размещенных на заднем кронштейне 14, рукоятки 74 (фиг.1 и 3) для панорамирования съемочной камерой 64, расположенной на среднем кронштейне 13, а также ручек 75 и 76 управления стрелой 1, закрепленных на продольных звеньях 5 и 27; видеомонитора 77, размещенного в рамке 57 среднего кронштейна 13.
Операторский кран может быть также размещен на тележке или подъемном устройстве.
Подготовка операторского крана к работе.
Перед началом работы производится балансировка камеры 64 (фиг.1, 2) по направляющей 65 до тех пор, пока передний кронштейн 12 не займет вертикальное положение, при этом камера 64 фиксируется зажимом 66. После чего производится балансировка стрелы 1 противовесом 67 относительно вертикальной оси опоры 59 (фиг.2, 3) до тех пор, пока стрела не займет горизонтальное положение. Окончательную балансировку относительно горизонтальной оси 54 горизонтальных шарниров 55, 56 среднего кронштейна 13 проводят при помощи вертикальной подвижки грузов противовеса 67 (фиг.1, 4) по направляющим 68 и 69 до тех пор, пока средний кронштейн 13 не займет вертикальное положение. После чего производится фиксация противовеса 67 зажимами 70 и 71.
Управление панорамированием камеры и стрелой может осуществляться с двух позиций расположения оператора.
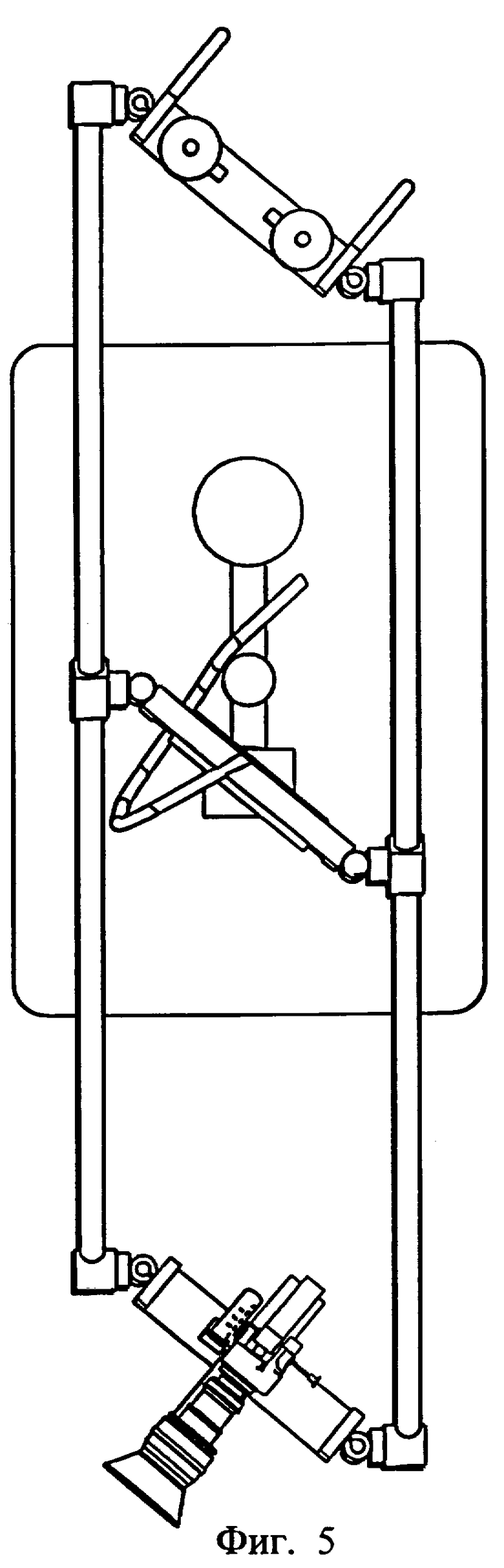
Первая позиция. Оператор управляет стрелой 1 и съемочной камерой 64 сидя на сиденье 60 (фиг.1, 3), находясь внутри пространства между продольными звеньями 4 и 24, а также между средним 13 и задним 14 кронштейнами, визуально отслеживая панораму, снимаемую съемочной камерой 64 на видеомониторе 77 или с помощью специальных видеоочков. Одной рукой он управляет панорамированием камеры 64, воздействуя на ручку 74 в горизонтальном и вертикальном направлениях (фиг.1, 5, 6). Другой рукой управляет наклоном стрелы, воздействуя на одну из ручек 75, 76. Таким образом, при изменении угла наклона кронштейна 13 в горизонтальной и вертикальной плоскостях с помощью ручки 74 оператор тем самым наклоняет или поворачивает передний кронштейн 12, сближая при этом или удаляя между собой продольные звенья 4, 5, 24, 27 стрелы 1 в вертикальной и горизонтальной плоскостях. При этом кронштейн 12 со съемочной камерой 64 полностью копирует движения рук оператора и он может по видеомонитору 77 или с помощью видеоочков контролировать изображение. При необходимости поворота стрелы 1 оператор с помощью ног разворачивает кулису 61 вместе с опорой 59 и установленной на ней стрелой 1.
Вторая позиция. Оператор управляет стрелой 1 и съемочной камерой 64 стоя у задней части 11 стрелы 1 крана (фиг.1, 5) и прилагает момент к различным частям ручек 72, 73. При этом, держа левую руку в верхней части ручки 72, а правую руку - в нижней части ручки 73, или наоборот, оператор складывает между собой продольные звенья 4, 5, 24, 27 в вертикальной плоскости (фиг.5, 6), тем самым осуществляя панорамирование съемочной камерой 64 по вертикали. В то же самое время, прилагая различные усилия к левой и правой ручке, складывает продольные звенья 4, 27 и 5, 24 в плоскостях второго 25 и четвертого 32 механизмов параллелограмма (фиг.5), тем самым панорамируя съемочной камерой 64 в горизонтальной плоскости. При этом подъем и поворот стрелы 1 крана осуществляют традиционным способом, а визирование, как и в первом случае, по экрану видеомонитора 77 или с помощью видеоочков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПЕРАТОРСКИЙ СЕКЦИОННЫЙ ТЕЛЕСКОПИЧЕСКИЙ КРАН | 2004 |
|
RU2281907C1 |
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| ОПЕРАТОРСКИЙ КРАН | 1990 |
|
RU2028271C1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| Устройство для дистанционного панорамирования съемочной камеры | 1985 |
|
SU1265685A1 |
| Дистанционно управляемый кинооператорский кран | 1984 |
|
SU1217774A1 |
| Операторский кран с системой дистанционного управления камерой | 1973 |
|
SU487366A1 |
| ОПЕРАТОРСКИЙ КРАН | 1993 |
|
RU2041156C1 |
| ТЕЛЕСКОПИЧЕСКИЙ ОПЕРАТОРСКИЙ КРАН | 1994 |
|
RU2075864C1 |
Изобретение относится к операторским кранам, используемым для перемещения и разворота съемочной камеры во время кино- или телесъемок. Стрела крана выполнена в виде механизма параллелограмма, расположенного в вертикальной плоскости с продольными и поперечными звеньями. Средняя часть стрелы размещена с возможностью поворота в вертикальной плоскости на опоре, установленной на основании с возможностью поворота стрелы в горизонтальной плоскости. Кроме того, кран содержит съемочную камеру и противовес, размещенные в передней и задней частях стрелы соответственно. К передней, средней и задней частям механизма параллелограмма посредством переднего, среднего и заднего кронштейнов с помощью шарнирных соединений дополнительно присоединено, по крайней мере, одно продольное звено, параллельно расположенное продольным звеньям упомянутого механизма параллелограмма с образованием при этом механизма второго параллелограмма, расположенного в плоскости, перпендикулярной плоскости упомянутого параллелограмма. Средний кронштейн размещен на опоре с возможностью поворота вокруг горизонтальной оси, проходящей через центр массы стрелы. Изобретение обеспечивает расширение диапазона панорамирования съемочной камеры при достижении большой плавности движения камеры и удобства управления краном оператором при съемке. 7 з.п. ф-лы, 6 ил.
| ОПЕРАТОРСКИЙ КРАН | 1993 |
|
RU2041156C1 |
| Промышленный робот | 1987 |
|
SU1549746A1 |
| US 3168284 А, 02.02.1965 | |||
| US 5177516 A, 05.01.1993. | |||

