Изобретение относится к радиолокации, в частности к пеленгации постановщиков активных шумовых помех (ПАШП). При их пеленгации "полезные" сигналы и помеховые имеют одинаковую структуру. "Полезным" считается сигнал источника помех, находящийся в главном лепестке диаграммы направленности, а сигналы постановщиков, воздействующих по боковым лепесткам диаграммы направленности (ДН) антенны, - помеховыми и должны компенсироваться корреляционным автокомпенсатором.
В реальных ситуациях при пеленгации ПАШП часто требуется информация о коэффициенте подавления помех в адаптивных устройствах для каждого углового направления. Знание коэффициента подавления позволяет правильно оценить мощность помех на выходе устройства адаптации, а следовательно, определить порог обнаружения при автоматизированном обнаружении. Последнее особенно важно в случае пеленгации относительно слабых ПАШП на фоне сильных, воздействующих по боковым лепесткам ДН антенны. Так как в этом случае менее интенсивные ПАШП могут оказаться пропущенными.
Коэффициент подавления автокомпенсатора определяется как отношение [1]
где Pпвх, Pпвых - мощность помехового сигнала на входе и выходе корреляционного автокомпенсатора.
Известен способ определения коэффициента подавления корреляционного автокомпенсатора (АКП), основанный на использовании сигнала специального источника (генератора) шума и заключающийся в вычислении отношения
где Pгшвых АКПвыкл, Pгшвых АКПвкл - мощности сигнала генератора шума на выходе устройства адаптации при выключенном и включенном АКП соответственно.
Наиболее близким решением, совпадающим с заявляемым способом по большинству существенных признаков, является способ, основанный на вычислении отношения [2].
где Pвых АКПвыкл, PвыхАКПвкл - мощности помеховых колебаний на выходе устройства адаптации при выключенном и включенном АКП соответственно.
Следует отметить, что все перечисленные выше способы совершенно непригодны для измерения коэффициента подавления помех в адаптивных устройствах, осуществляющих пеленгацию источников стохастических (шумовых) сигналов. В этом случае полезный сигнал обладает шумовой структурой, полностью сходной со структурой помеховых (мешающих) сигналов, т.к. последние при воздействии по главному лепестку ДН антенны, в свою очередь, являются полезными сигналами.
В первом способе (2) информация о коэффициенте подавления не зависит от помеховой обстановки, а его значение (при полностью исправной аппаратуре) будет всегда близко к своему паспортному значению, реальное же значение остается неизвестным.
Во втором способе (3) имеют место трудности, связанные с невозможностью определения уровня АПШ из-за влияния полезного сигнала, имеющего одинаковую структуру с помеховыми. Кроме того, способ требует временных затрат, связанных с включением, выключением АКП, что при нестационарности помех, всегда имеющей место при обзоре пространства, неизбежно будет приводить к существенным погрешностям в определении коэффициента подавления АКП. Таким образом, недостатком прототипа является невозможность получения реального значения коэффициента подавления АКП в адаптивных устройствах обработки при пеленгации источников АШП.
Целью предлагаемого способа является получение коэффициента подавления АКП, наиболее близкого к реальному при воздействии по главному лепестку ДН помехопостановщика значительно меньшей интенсивности, чем по боковым лепесткам (фиг.1).
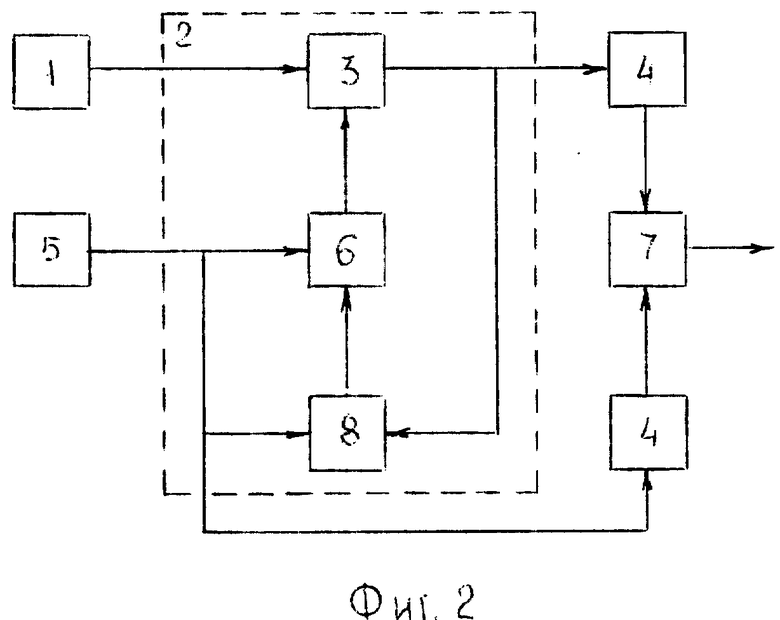
Поставленная цель решается квазиоптимальным способом определения коэффициента подавления помех в адаптивных пеленгаторах, сущность которого заключается в следующем. За уровень помех, принимаемых боковыми лепестками основной антенны, принимается уровень помех в дополнительной антенне, диаграмма направленности которой имеет провал в направлении основного лепестка, а на остальных направлениях имеет уровень, превышающий уровень основной антенны на 3 дБ (фиг.1). Здесь сплошной линией обозначена диаграмма направленности основной антенны, штриховой - ДН дополнительной антенны, угловое направление выражено в долях ширины ДН основной антенны, стрелками указаны положения помехопостановщиков с интенсивностями, пронормированными к мощности собственных шумов приемного тракта. Заявляемое устройство, реализующее предлагаемый способ, приведено на фиг.2, где введены следующие обозначения: 1 - основная антенна, 2 - корреляционный автокомпенсатор, 3 - сумматор, 4 - аналого-цифровой преобразователь, 5 - дополнительная антенна, 6 - регулируемый усилитель, 7 - блок вычисления отношения сигналов, 8 - перемножитель-усреднитель (устройство определения корреляционного момента помех).
Устройство содержит основную 1 и дополнительную 5 антенны, выходы которых являются входами устройства, последовательно соединенные корреляционный автокомпенсатор помех 2, содержащий последовательно соединенные перемножитель-усреднитель 8, регулируемый усилитель 6 и сумматор 3, при этом выход дополнительной антенны 5 соединен с первыми входами регулируемого усилителя 6 и перемножителя-усреднителя 8, второй вход которого соединен с выходом сумматора 3, являющегося выходом АКП. Второй вход сумматора 3 соединен с выходом основной антенны 1. Выход АКП 2 через аналого-цифровой преобразователь 4 соединен с первым входом блока вычисления отношения сигналов 7, второй вход которого через 2-й аналого-цифровой преобразователь 4 соединен с выходом дополнительной антенны 5. Выход блока вычисления отношения сигналов 7 является выходом устройства.
Устройство работает следующим образом. С выхода основной антенны на вход АК поступает аддитивная смесь "полезного" и помеховых сигналов
где G
σ
σ
С выхода дополнительной антенны на компенсационный вход АК поступает смесь помеховых колебаний
В этом случае соотношение между уровнем помех в дополнительной антенне и уровнем помех на выходе сумматора 3 при включенном автокомпенсаторе с коэффициентом подавления Kп будет определяться выражением
где G
Учитывая,  найдем из (6) измеренный коэффициент подавления.
найдем из (6) измеренный коэффициент подавления.
где  - мощность помех в дополнительной антенне 5;
- мощность помех в дополнительной антенне 5; - мощность остатков помех на выходе автокомпенсатора 2.
- мощность остатков помех на выходе автокомпенсатора 2.
Значения мощностей помех на выходах дополнительной антенны и автокомпенсатора преобразуются в цифровой код аналого-цифровыми преобразователями 4, после чего в блоке вычисления отношения сигналов 7 определяется их отношение в соответствии с выражением (8). Следует отметить, что выражение (8) с достаточной степенью точности справедливо лишь при выполнении условий (7). При других же условиях проблема определения точного значения коэффициента подавления АКП не стоит, так как и не существует проблемы обнаружения сильных источников излучений на фоне слабых.
Блок вычисления отношения сигналов может быть реализован различными способами, например, на основе микросхемы памяти, в которую зашита таблица предварительно выполненных вычислений. Информация, поступающая в АЦП, определяет адрес ячейки, в которой хранится вычисленное значение. Другой способ реализации блока - микропроцессор, осуществляющий операцию деления входных сигналов.
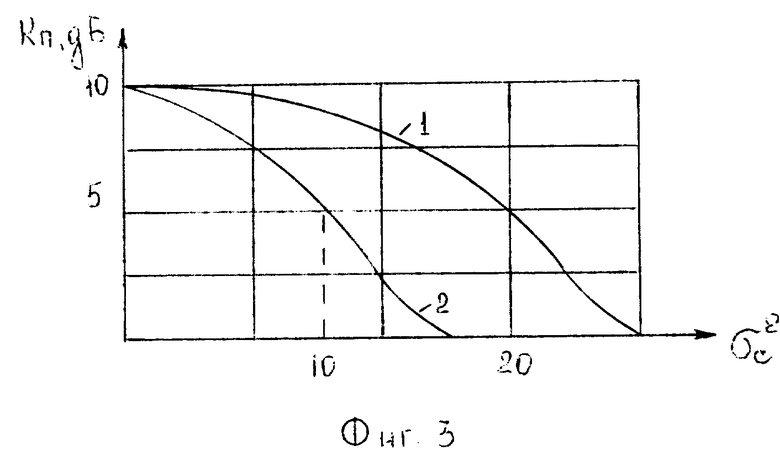
Результаты расчетов Kп в соответствии с выражениями (3) и (8) приведены на фиг. 3. Расчеты производились при условии, что постановщик "помехового" сигнала относительной интенсивностью 400 воздействует по первому боковому лепестку ДН основной антенны, имеющему уровень 20 дБ (фиг.1), коэффициент подавления автокомпенсатора - 10 дБ.
На фиг.3 сплошной линией 1 показана зависимость Kп от мощности "полезного" сигнала для заявляемого способа и устройства, его реализующего, и прототипа - сплошной линией 2. Из приведенных зависимостей следует, что при отсутствии полезного сигнала коэффициент подавления помех, определяемый обоими способами, - 10 дБ и соответствует реальному значению. С увеличением мощности полезного сигнала измеренные значения коэффициента подавления существенно различаются. Например, при значении σ
Таким образом, рассмотренное предложение обеспечивает соответствие заявляемому решению критериям: "техническое решение задачи" и "положительный эффект".
Анализ научно-технической, патентной и конъюнктурно-экономической информации показал, что предлагаемый способ и устройство, его реализующее, является новыми и соответствуют критерию "изобретательский уровень".
Необходимость использования заявляемого способа и устройства состоит в стремлении иметь значение коэффициента подавления автокомпенсатора, наиболее близкого к реальному значению при пеленгации слабых постановщиков на фоне более сильных.
Сравнение заявляемого способа и устройства с другими техническими решениями показывает: дополнительная антенна, корреляционный автокомпенсатор, блок вычисления отношения сигналов широко известны [3, 4].
Однако при их введении в указанной связи в заявляемое устройство вышеуказанные элементы проявляют новые свойства, позволяющие более точно определять коэффициент подавления автокомпенсатора при пеленгации слабых постановщиков на фоне более сильных. Это позволяет сделать вывод о соответствии заявляемого решения критерию "существенные отличия".
Источники информации:
1. Ширман Я.Д. Теоретические основы радиолокации. -М.: Сов. радио, 1970, 560 с.
2. Батурин И. Г., Гомозов В.И., Екимов В.Ф. и др. Теория и техника генерирования, излучения и приема радиолокационных сигналов. /Под ред. Ю.Н. Седышева, -Харьков: ВИРТА, 1984, 650 с.
3. Монзинго Р. А., Миллер Г.У. Адаптивные антенные решетки: Введение в теорию: Пер. с анг. -М.: Радио и связь, 1986, 448 с.
4. Алмазов В.Б., Манжос В.Н. Получение и обработка радиолокационной информации. -Харьков: ВИРТА, 1985, 427 с.
Изобретение относится к радиолокации, в частности к пеленгации постановщиков активных шумовых помех. Технический результат заключается в измерении коэффициента подавления корреляционного автокомпенсатора помех в условиях, когда отсутствуют различия между полезным сигналом и помехой. Для этого вычисляется отношение сигналов, принимаемых дополнительной антенной, имеющей провал в направлении главного лепестка диаграммы направленности основной антенны, и сигнала с выхода автокомпенсатора. Предложено устройство для реализации способа по измерению коэффициента подавления автокомпенсатора. Данное устройство содержит основную и дополнительную антенны, выходы которых соединены с основным и компенсационным входами корреляционного автокомпенсатора, в которое дополнительно введены два аналого-цифровых преобразователя и блок вычисления отношения сигнала, причем вход первого аналого-цифрового преобразователя соединен с выходом корреляционного автокомпенсатора, а вход второго с выходом дополнительной антенны, при этом выходы аналого-цифровых преобразователей соединены с входами блока вычисления отношения сигнала, выход которого и является выходом устройства. 2 с.п.ф-лы, 3 ил.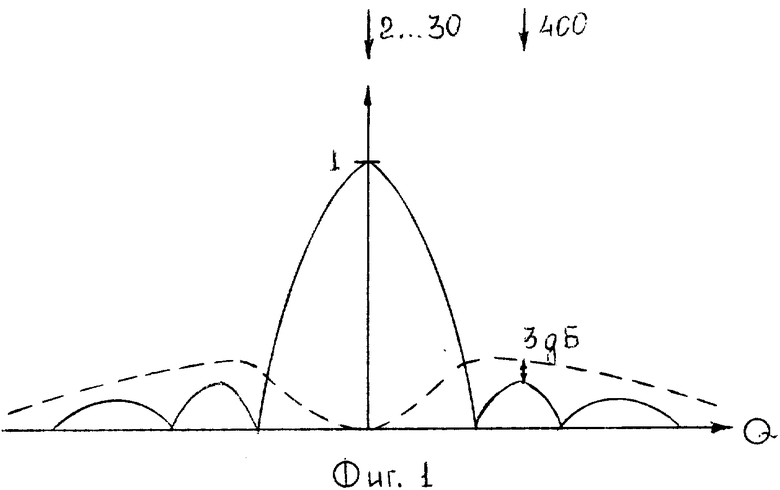
| Ширман Я.Д | |||
| Теоретические основы радиолокации | |||
| - М.: Сов.радио, 1970, с.432 | |||
| Охрименко А.Е | |||
| Основы радиолокации и радиоэлектронная борьба | |||
| - М.: Воениздат, 1983, с.155 | |||
| US 5307069, А, 26.04.94 | |||
| Многоканальное устройство подавления помех | 1988 |
|
SU1575318A1 |
| US 3725929 А, 03.04.73. | |||
