Предлагаемое изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости в условиях воздействия преднамеренных широкополосных помех.
Известен способ компенсации помех, принятых на основную и дополнительные (компенсационные) антенны, которые не должны содержать полезного сигнала [1]. Сигнал основного канала подается на сумматор с единичным весом, а колебания компенсационных каналов взвешиваются, исходя из помеховой обстановки. При этом цель подстройки весовых коэффициентов - обеспечить минимальную мощность шума на выходе сумматора. Недостатком этого способа является невозможность определения углового положения объекта.
Наиболее близким к заявляемому является способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов, основанный на приеме аддитивной смеси помехи и сигналов от n навигационных космических аппаратов двумя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны одной или двум осям объекта, и измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов. Перед измерением фазовых сдвигов определяют вектор поправочного весового коэффициента для каждого из приемных каналов путем их калибровки эталонной пилот-помехой, сигнал помехи каждого из приемных каналов суммируют с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на соответствующий вектор весового коэффициента, которые вычисляют на основе рекуррентной оценки обратной корреляционной матрицы помех с учетом векторов поправочных весовых коэффициентов, выделяют радионавигационные сигналы от n навигационных космических аппаратов и определяют угловое положение объекта [2].
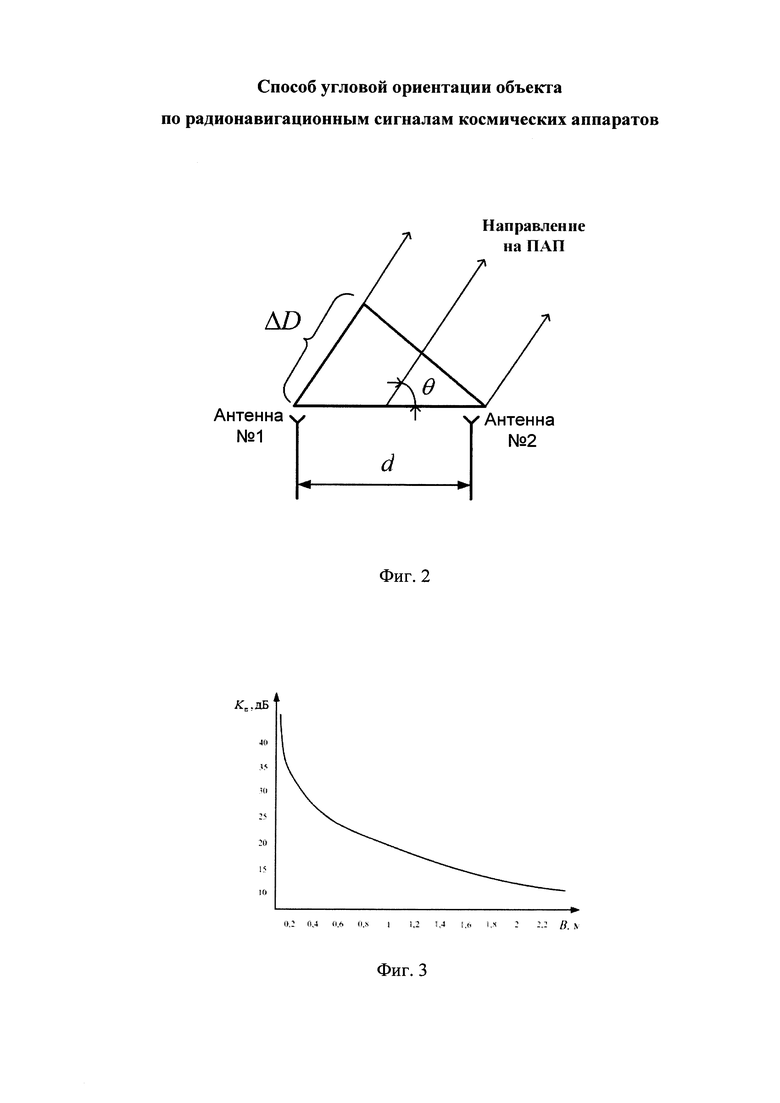
Основным недостатком такого способа является недостаточный коэффициент подавления преднамеренных помех при больших базах интерферометра. Для примера, при точности измерения углов пространственной ориентации, равной 4-м угловым минутам (расстояние между антеннами В=2 м), максимально достижимый коэффициент подавления будет составлять не более 15 дБ.
В основу изобретения положена задача повышения помехоустойчивости угломерной навигационной аппаратуры потребителей путем компенсации межканальной задержки сигналов за счет использования многоотводных линий задержки выравнивающего фильтра и сглаживания группового времени запаздывания, что в целом согласовывает геометрию расположения антенн с плоским волновым фронтом принимаемых помеховых колебаний.
Поставленная задача решается тем, что в способе угловой ориентации объекта по радионавигационным сигналам космических аппаратов, основанном на приеме аддитивной смеси помехи и сигналов от n навигационных космических аппаратов двумя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны одной или двум осям объекта, суммировании сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделении радионавигационных сигналов от n навигационных космических аппаратов, восстановлении их исходных параметров в каждом приемном канале, измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов между парами приемных каналов и определении углового положения объекта, согласно изобретению перед суммированием сигналов осуществляют их дискретную временную задержку, а весовые коэффициенты вычисляют для каждой дискреты задержки и восстанавливают исходные параметры радионавигационных сигналов от n навигационных космических аппаратов с учетом соответствующей дискретной задержки.
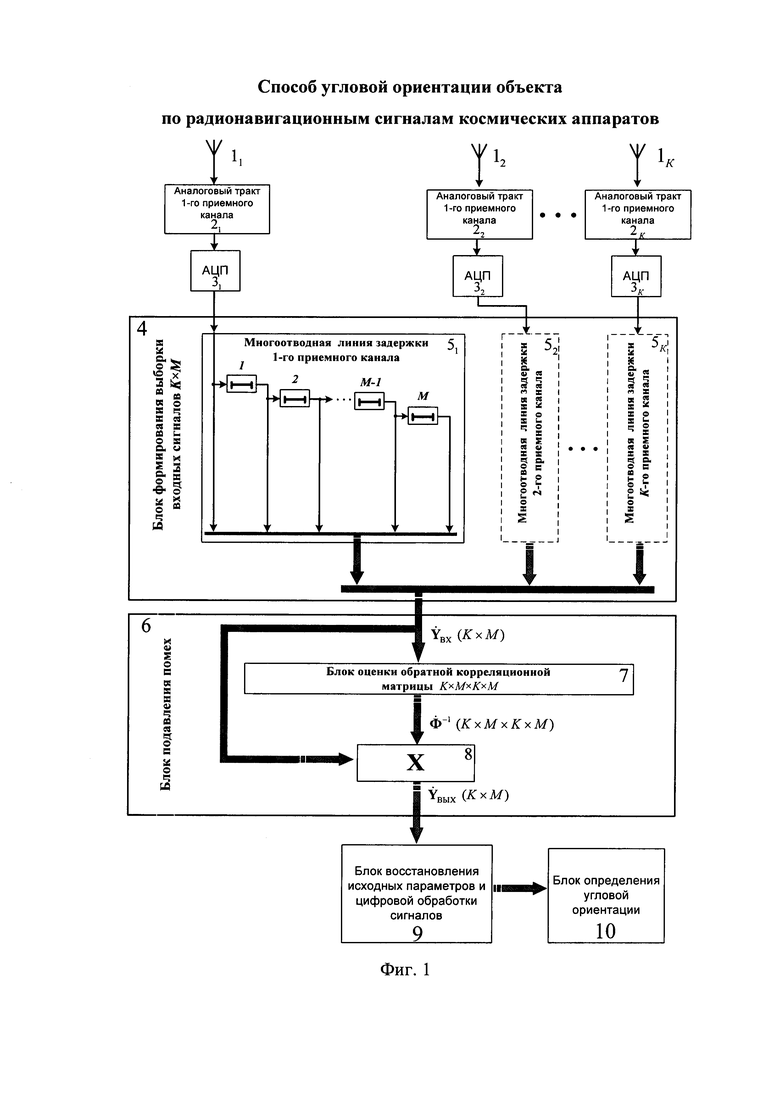
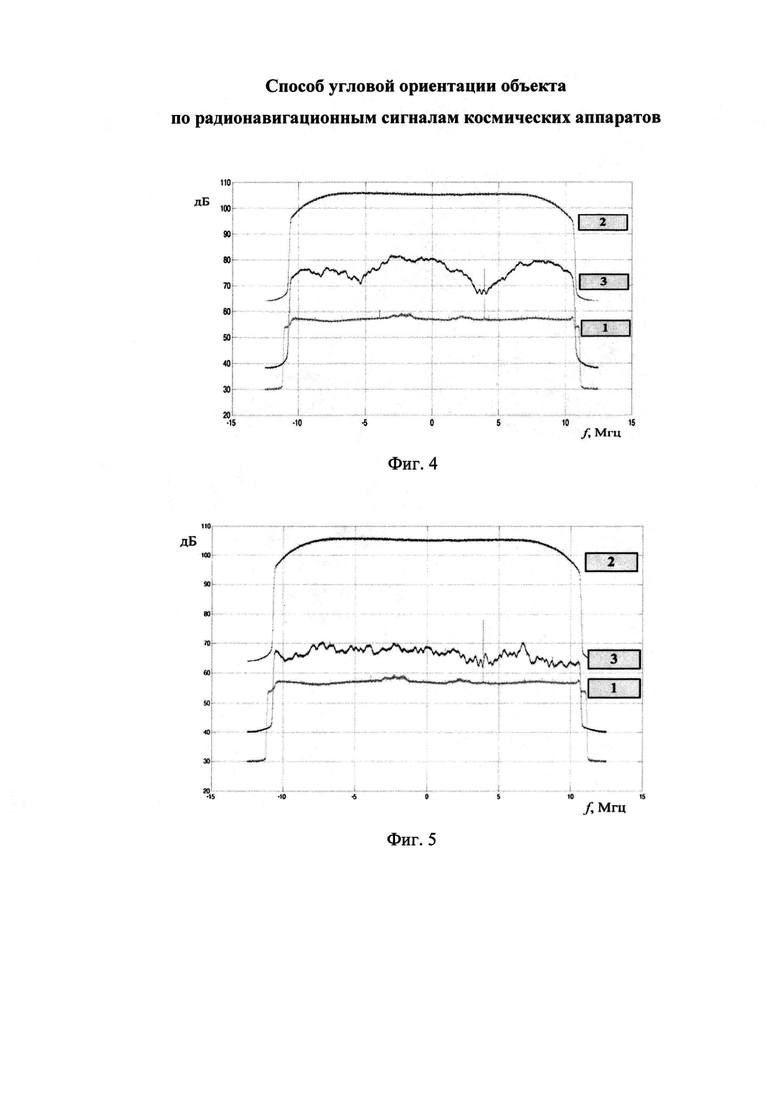
На фиг. 1 представлена структурная схема устройства определения угловой ориентации объекта, реализующего заявляемый способ; на фиг. 2 - схема межканальной задержки помехи в разнесенных приемных антеннах; на фиг. 3 приведена зависимость максимально достижимого коэффициента подавления помех от длины базы однобазового интерферометра; на фиг. 4. - спектр сигнально-помеховой обстановки устройства, используемого при осуществлении известных способов подавления помех; на фиг. 5. - спектр сигнально-помеховой обстановки устройства, реализующего заявляемый способ.
Сущность изобретения заключается в следующем.
Пространственная ориентация объектов при помощи навигационной аппаратуры потребителей (НАП) определяется интерферометрическими методами за счет приема навигационных сигналов спутниковой радионавигационной системы «ГЛОНАСС» на разнесенные приемные антенны, то есть на основе оценки начальных фаз навигационных сигналов, принятых от каждого навигационного космического аппарата (НКА). Для этой цели используется антенная система (АС), состоящая из нескольких приемных антенн (как минимум трех), для определения углов курса, крена и тангажа. Антенны интерферометра можно использовать также и для повышения помехоустойчивости навигационной аппаратуры потребителя методами пространственной фильтрации. Поэтому кроме собственно определения пространственной ориентации объекта АС можно также использовать и для его адаптации к помехам на основе методов пространственной селекции [3].
Наиболее эффективное подавление помех будет происходить в случае максимальной корреляции помеховых сигналов, принятых на разнесенные приемные антенны. Коэффициент корреляции принимаемых помех зависит от идентичности амплитудно-частотных и фазово-частотных характеристик приемных каналов, а также от взаимного расположения антенных элементов в пространстве [4]. Идентичности характеристик приемных каналов добиваются за счет коррекции частотных характеристик приемных каналов и калибровки времени задержки сигналов. Межканальная калибровка снижает аппаратурную систематическую погрешность НАП и является достаточной в том случае, когда фазовые центры приемных антенн находятся в непосредственной близости друг к другу. В случае же угломерной НАП, когда для увеличения точности измерения углов пространственной ориентации объекта расстояние между антеннами увеличивают до нескольких метров, возникает задержка распространения радионавигационных и помеховых сигналов (фиг. 2). И если в случае радионавигационного сигнала данная задержка позволяет, разрешив фазовую неоднозначность [5], измерить углы пространственной ориентации, то в случае помехового сигнала она (задержка) вызывает его существенную межканальную декорреляцию и, как следствие, уменьшение коэффициента подавления.
Значение межканальной задержки сигналов зависит от величины базы интерферометра и взаимной ориентации расположения приемных антенн и постановщика активных помех (ПАП). Этот относительный временной сдвиг колебаний сигнала помехи tз на входах приемных каналов 1, 2, …, К можно оценить по выражению:

где d - расстояние между фазовыми центрами приемных антенн, м;
θ - угол между линией, проведенной через фазовые центры приемных антенн и направлением на ПАП, град.;
c - скорость света, м/с;
ΔD - разность хода помехового сигнала между фазовыми центрами приемных антенн, м.
Коэффициент подавления помехи Kп одним квадратурным подканалом, с учетом временного сдвига tз помеховых колебаний, принимает следующий вид:

где tз - время задержки помех между приемными антеннами, с;
ρ - коэффициент корреляции помех;
 - ширина полосы пропускания приемника, Гц.
- ширина полосы пропускания приемника, Гц.
Из фиг. 2 видно, что максимальное время задержки помехи между приемными антеннами будет составлять при θ≈0° (наихудший вариант воздействия преднамеренных помех). Для наземных объектов, как правило, угол приема помех θ будет незначительным, поэтому при больших базах интерферометра наземная угломерная НАП более уязвима к преднамеренным помехам. Основная задача реализации адаптируемого пространственного фильтра на базе угломерной антенной системы предполагает повышение помехоустойчивости угломерной НАП, не снижая точности измерения пространственной ориентации объекта. В данном случае высокая разрешающая способность антенной системы НАП должна быть обеспечена без использования большого числа приемных антенн, и расстояние между приемными антеннами в несколько раз превышает половину длины волны (λ/2) радионавигационных сигналов. Поскольку повышение точности измерения пространственной ориентации объекта связано с увеличением расстояния разнесенных приемных антенн (более λ/2), в результате возникает большое количество побочных интерференционных максимумов и минимумов диаграммы направленности.

где λ - длина волны радионавигационного сигнала, м;
d - расстояние между приемными антеннами, м;
q - количество приемных антенн;
i - количество интерференционных экстремумов - 1, 2, 3, …
В итоге диаграмма направленности антенной системы приобретает многолепестковый характер с достаточно «изрезанной» формой. Если диаграмма направленности антенной системы имеет дополнительные нули, то может случиться так, что направление полезного сигнала совпадет с одним из минимумов, что приведет к резкому уменьшению выходного отношения сигнал/шум.
С целью компенсации межканальных временных задержек в угломерной НАП, оснащенной системой пространственной фильтрации помех на основе многоканального корреляционного автокомпенсатора, предлагается использовать многоотводные линии задержки (выравнивающего фильтра) для выравнивания приема помеховых колебаний.
Рассмотрим осуществление заявляемого способа на примере с использованием многоотводного выравнивающего фильтра коррекции межканальной задержки сигналов.
Устройство определения угловой ориентации объекта в условиях воздействия широкополосных помех содержит К приемных каналов, каждый из которых представляет собой последовательно соединенные антенну 11 (12, …, 1к), аналоговый тракт 21 (22, …, 2к) и аналого-цифровой преобразователь 31 (32, …, 3к), выход которого подключен к соответствующему входу блока 4 формирования выборки входных сигналов. Блок 4 формирования выборки входных сигналов содержит К многоотводных линий 51 (52, …, 5к) задержки, каждая из которых представляет последовательное соединение М линий задержек сигналов. Вход многоотводной линии задержки соединен с входом первой линии задержи, а выход каждой линии задержки соединен с выходной шиной данных многоотводной линии задержки и входом последующей линии задержки. Выходы многоотводных линий 51 (52, …, 5к) задержек всех каналов сводятся в общую шину данных блока 4 формирования выборки входных сигналов, которая подключается к входу блока 6 подавления помех. Блок 6 подавления помех состоит из последовательно соединенных блока 7 оценки обратной корреляционной матрицы и перемножителя 8, второй вход которого соединен с входом блока 6, а выход его является выходом блока 6 подавления помех и соединен с входом блока 9 восстановления исходных параметров цифровой обработки сигналов, который выходом подключен к блоку 10 определения угловой ориентации.
Работает устройство следующим образом.
Аддитивная смесь радионавигационных сигналов и помех принимается разнесенными антеннами 11 (12, …, 1к), усиливается и преобразуется в сигналы промежуточной частоты аналоговыми трактами 21 (22, …, 2к) и затем поступает в аналого-цифровые преобразователи (АЦП) 31 (32, …, 3к) приемных каналов. С выходов АЦП цифровые коды аддитивной смеси радионавигационных сигналов и помех каждого приемного канала поступают на вход соответствующей многоотводной линии 51 (52, …, 5к) задержки блока 4 формирования выборки входных сигналов.
Цифровые коды входных сигналов каждой дискреты задержки поступают в выходную шину данных многоотводной линии задержки 51 (52, …, 5к), а выходы всех многоотводных линий задержки (51, …, 5к) сводятся в общую шину данных блока 4 формирования выборки входных сигналов. Путем использования М последовательно соединенных линий задержки каждого канала на выходе блока 4 формируется выборка сигналов с набором дискрет задержки в виде матрицы размерностью K×M, где K - количество приемных каналов, М - количество линий задержки в многоотводной линии задержки каждого канала.
С выхода блока 4 формирования выборки входных сигналов цифровые сигналы по общей шине данных поступают на вход блока 6 подавления помех.
Блок 6 подавления помех решает следующие задачи:
- вычисление корреляционной матрицы помех на фоне корреляционных помех и ее обращение (при этом корреляционная матрица помех должна быть невырожденной, т.е. ее определитель не равен нулю);
- компенсацию помех за счет векторно-матричной операции перемножения обратной корреляционной матрицы помех с входной реализацией приемных сигналов.
Блок 6 подавления помех построен по варианту без выделенного основного приемного канала, в котором каждый канал является основным и в то же время компенсационным по отношению к другим приемным каналам.
Формирование провалов в направлении источников помех осуществляется итерационным расчетом, за счет использования рекуррентного алгоритма подстройки текущих весовых коэффициентов, направленного на уменьшение ошибки оценивания процесса адаптации и компенсации помех. Весовые коэффициенты вычисляются на основе рекуррентной оценки обратной корреляционной матрицы помех. Обратная корреляционная матрица помех содержит всю информацию об угловых положениях источников помех и излучаемой ими спектральной плотности мощности помехи.
Целью рекуррентного вычисления обратной корреляционной матрицы  блока 7 оценки обратной корреляционной матрицы является формирование текущих весовых коэффициентов и обеспечение минимальной мощности помех на выходе блока 6 подавления помех. Определяя весовые коэффициенты и далее перемножая их в перемножителе 8 с принятой выборкой входных сигналов каждого канала, добиваются образования «провалов» в результирующей диаграмме направленности (ДН) в направлении на постановщиков активных помех.
блока 7 оценки обратной корреляционной матрицы является формирование текущих весовых коэффициентов и обеспечение минимальной мощности помех на выходе блока 6 подавления помех. Определяя весовые коэффициенты и далее перемножая их в перемножителе 8 с принятой выборкой входных сигналов каждого канала, добиваются образования «провалов» в результирующей диаграмме направленности (ДН) в направлении на постановщиков активных помех.
В данном случае увеличение коэффициента подавления помеховых колебаний и компенсация помех достигается путем пространственно-временной обработки сигналов приемных каналов за счет расчета весовых коэффициентов в каждом из отводов многоотводной линии задержки каждого канала. Именно вычисление весового коэффициента в каждой линии многоотводной линии задержки с определенным временем задержки и компенсирует межканальную задержку помехи каждого приемного канала и согласовывает в целом геометрию расположения приемных антенн с плоским волновым фронтом принимаемых помех. Вследствие такой пространственно-временной обработки сигналов повышается межканальный коэффициент корреляции помех в приемных каналах и максимизируется их подавление. Результирующее время задержки соответствует максимальному времени распространения помехи между разнесенными приемными антеннами.
С выхода блока 6 подавления помех остатки помех и радионавигационные сигналы 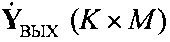 поступают на вход блока 9 восстановления исходных параметров и цифровой обработки сигналов. При дискретной задержке входных сигналов и расчете весовых коэффициентов для подавления помех изменяются также и фазовые соотношения радионавигационных сигналов от каждого НКА. В результате искажения фазовых сдвигов при подавлении помех информация об угловой ориентации искажается, и измерения становятся недействительными.
поступают на вход блока 9 восстановления исходных параметров и цифровой обработки сигналов. При дискретной задержке входных сигналов и расчете весовых коэффициентов для подавления помех изменяются также и фазовые соотношения радионавигационных сигналов от каждого НКА. В результате искажения фазовых сдвигов при подавлении помех информация об угловой ориентации искажается, и измерения становятся недействительными.
Решается эта проблема путем коррекции измеренных фазовых сдвигов и восстановления фазы. Информация о дискретных задержках сигналов и весовых коэффициентов, которые используются в блоке подавления помех для каждой итерации, известна, и тем самым в дальнейшем используется в цифровой обработке сигналов. Исследования показывают, что исходные фазовые соотношения радионавигационных сигналов восстанавливаются без каких-либо систематических ошибок.
При цифровой обработке сигналов происходит разделение радионавигационных сигналов каждого из навигационных космических аппаратов, а также поиск, захват сигналов по частоте, коррекция фазовых соотношений и задержек, частотная автоподстройка, синхронизация по метке времени и границе бита служебной информации, прием и декодирование служебной информации и измерение радионавигационных параметров радионавигационного сигнала.
В блоке определения угловой ориентации 10 производится оптимальная оценка начальных фаз сигналов, принятых антеннами, вычисляются значения фазовых сдвигов сигналов, которые в дальнейшем используются для определения углового положения объекта (курс, крен, тангаж).
В результате экспериментальных исследований помехоустойчивости угломерной НАП с различным порядком многоотводных линий задержки (выравнивающего фильтра) получены спектры помехи и имитируемого радионавигационного сигнала в полосе пропускания приемника (аналогового тракта).
Экспериментальные исследования проводились с использованием трех приемных антенн, двух передающих антенн и подключенных к ним источника гармонического сигнала литеры «7» ГЛОНАСС (имитатор навигационных сигналов «МРК-40») и источника сигнала широкополосной помехи (векторный генератор «Rohde&Schwartz»).
Мощность помехи плавно регулировалась штатным высокочастотным генератором Rohde&Schwartz. Контроль мощности помехи в месте приема сигнала осуществлялся с помощью анализатора спектра «Agilent», размещенного в точке антенной системы угломерной НАП.
При проведении экспериментальных испытаний производилась запись сигналов в цифровом виде независимых выборок сигнально-помеховой обстановки угломерных каналов, их программная обработка в соответствии с рекуррентным алгоритмом адаптивной защиты угломерной НАП и проведения измерений пространственной ориентации объекта при подавлении преднамеренных помех.
В постобработке реализован перенос спектра принимаемых сигналов на нулевую частоту. Перенос выполняется в несколько этапов с расщеплением на квадратурные составляющие.
На фиг. 4 представлены спектры преднамеренной помехи - 2, спектр радионавигационного сигнала в первом угломерном канале литеры «7» ГЛОНАСС от имитатора навигационных сигналов МРК-40 на частоте 4 МГц без помех - 1 и спектр этого сигнала после адаптации к помехам без компенсации межканальной задержки сигналов - 3. В результате адаптации в полосе пропускания приемника коэффициент подавления помех имеет значительный разброс и недостаточные значения для сложных условий электромагнитной обстановки (в среднем в ДН формируются узкие провалы 10-20 дБ). Разброс значений коэффициента подавления помех в полосе частот радионавигационных сигналов объясняется различием частотных характеристик приемных каналов и различным временем задержки распространения помехового колебания между разнесенными в пространстве приемными антеннами.
На фиг. 5 представлены спектры преднамеренной помехи - 2, спектр радионавигационного сигнала в первом угломерном канале литеры «7» ГЛОНАСС от имитатора навигационных сигналов МРК-40 на частоте 4 МГц без помех - 1 и спектр этого сигнала после адаптации к помехам с применением выравнивающего фильтра - 3. Из результатов применения выравнивающего фильтра видно, что спектр сигналов после подавления помех более равномерный в полосе пропускания приемника, и коэффициент пространственного подавления помех увеличился до 35-40 дБ.
Таким образом, описанный принцип компенсации межканальной задержки сигналов при помощи многоотводных линий задержки (выравнивающего фильтра) осуществляет задачу повышения помехоустойчивости угломерной навигационной аппаратуры потребителей. По результатам исследований использование выравнивающего фильтра 5-го порядка, позволяет увеличить коэффициент подавления помех на 15-20 дБ по сравнению с существующими методами подавления помех в разнесенных антенных системах угломерной НАП. Экспериментальные испытания также показали, что увеличение порядка выравнивающего фильтра (более 10) не дает значительного прироста коэффициента подавления, однако при этом существенно возрастают вычислительные и аппаратные затраты.
Источники информации
1. Создание помехозащищенных навигационных приемников, способных измерять пространственную ориентацию объектов / В.Н. Тяпкин, Ю.Л. Фатеев, Д.Д. Дмитриев, Е.Н. Гарин, В.Н. Ратушняк // Успехи современной радиоэлектроники. - 2014. - №5. С. 61-65.
2. Пат. №2564523. РФ, С1 МПК G01S 1/00. Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов / Ратушняк В.Н., Фатеев Ю.Л., Тяпкин В.Н., Гарин Е.Н., Дмитриев Д.Д., Вейсов Е.А.; Заявитель и патентообладатель СФУ; заявка №2014129573/07, зарег. 17.07.2014.
3. Синтез алгоритма защиты от помех в восьмиэлементной фазированной антенной решетке / Ю.Л. Фатеев, Д.Д. Дмитриев, В.Н. Тяпкин, В.Н. Ратушняк // Радиотехника. - 2014. - №1. - С. 29-34.
4. Методы адаптации фазированных антенных решеток к помехам в спутниковых радионавигационных системах / Д.Д. Дмитриев, В.Н. Тяпкин, Н.С. Кремез // Радиотехника. - 2013. - №9. - С. 39-43.
5. Калибровка измерительного тракта для испытания навигационной аппаратуры потребителей спутниковых радионавигационных систем на помехоустойчивость / В.Н. Тяпкин, Ю.Л. Фатеев, Д.Д. Дмитриев, В.Г. Коннов // Вестник СибГАУ. - 2012. - Вып. 4 (44). - С. 139-142.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2564523C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Способ определения угловой ориентации летательного аппарата | 2024 |
|
RU2821640C1 |
| СИСТЕМА РАДИОПОДАВЛЕНИЯ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ ГНСС ПРОТИВНИКА, СОВМЕСТИМАЯ С ОТЕЧЕСТВЕННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЕЙ ГНСС | 2013 |
|
RU2539563C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2006 |
|
RU2316899C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
Изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости в условиях воздействия преднамеренных широкополосных помех. Технический результат заключается в повышении помехоустойчивости угломерной навигационной аппаратуры потребителей. Указанный результат достигается путем компенсации межканальной задержки сигналов, выравнивания группового времени запаздывания и дальнейшего компенсационного цифрового суммирования преднамеренных помех в соответствии с рекуррентным алгоритмом формирования весовых коэффициентов для каждой линии задержки. 5 ил.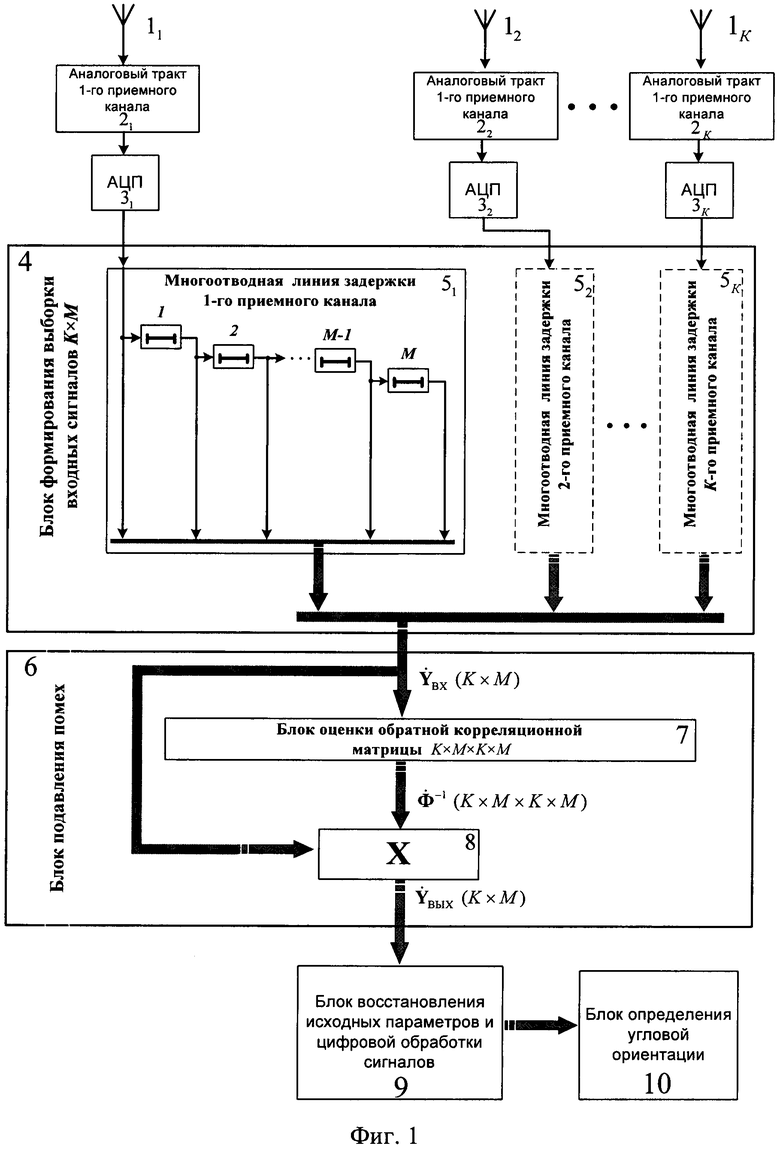
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов, основанный на приеме аддитивной смеси помехи и сигналов от n навигационных космических аппаратов двумя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны одной или двум осям объекта, суммировании сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделении радионавигационных сигналов от n навигационных космических аппаратов, восстановлении их исходных параметров в каждом приемном канале, измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов между парами приемных каналов и определении углового положения объекта, отличающийся тем, что перед суммированием сигналов осуществляют их дискретную временную задержку, а весовые коэффициенты вычисляют для каждой дискреты задержки и восстанавливают исходные параметры радионавигационных сигналов от n навигационных космических аппаратов с учетом соответствующей дискретной задержки.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2564523C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2008 |
|
RU2379700C1 |
| Конденсаторный микрофон | 1930 |
|
SU19666A1 |
| Счетчик ледяных ядер | 1978 |
|
SU679904A1 |
| WO 2008046363 A1, 24.04.2008 | |||
| US 5379045 A, 03.01.1995. | |||

