1
Изобретение относится к радиолокации, может использоваться в когерентно-импульсных радиолокационных станциях (РЛС) сопровождения для подавления и декорреляции помех в виде мешающих отражений.
Известен цифровой автокомпенсатор пассивных помех, содержащий первый сумматор, выход которого соединен со входом первого динамического звена, второй сумматор, выход которого соединен со входом второго динамического звена, и два квадратурных канала, каждый из которых содержит фазовый детектор, выход которого соединен со входом аналого-цифрового преобразователя, блок череспериодной компенсации, состоящий из параллельно соединенных регистра сдвига и перемножителя, выходы которьк подключены к сумматору блока череспериодной компенсации первый и второй перемножители, причем выходы первых перемножителей обоих каналов через первый сумматор и первое динамическое звено соединены с перемножителями блоков череспериодной компенсации обоих каналов, а выходы вторых перемножителей обоих каналов через второй сумматор соединены со входом второго динамического звена 1 .
Однако известный цифровой автокомпенсатор пассивных помех недостаточно эффективно подавляет эти помехи.
Цель изобретения - повышение эффективности подавления пассивных помех.
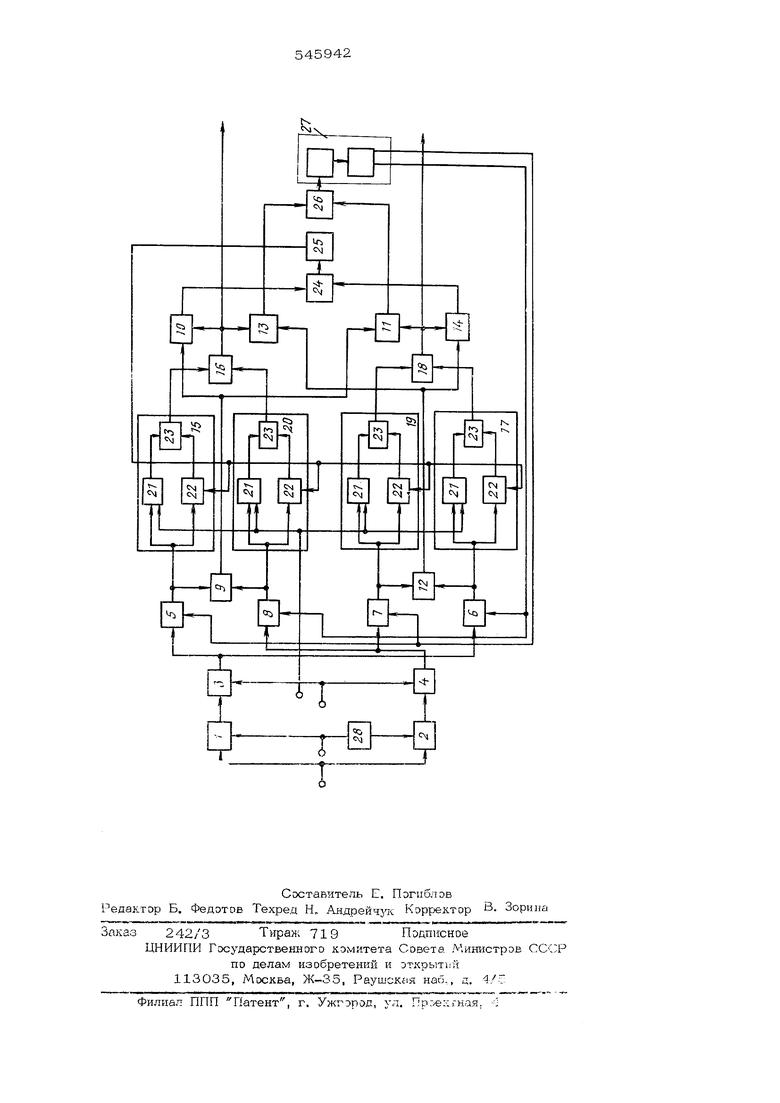
Для этого в цифровой автокомпенсатор пассивных помех, содержащий первый сумматор, выход которого соединен со входом первого динамического звена, второй сумматор, выход которого соединен со входом второго динамического звена и два квадратурных канала, каждый из которых содержит фазовый детектор, выход которого соединен со входом аналого-цифрового преобразователя, блок череспериодной компенсации, состоящий из параллельно соединенных регистра сдвига и пере множителя, выходы которых подключены к сумматору блока череспериодной компенсации, первый и второй перемножители, причем выходы первых перемножителей обоих каналов черюз первый сумматор и первое динамическое звено соединены с перемножителями блоков череспериодной компенсации обою; хаиалоБ, а иыхГД - от/рь ; перемножителей обоих каналов ч:.,.::.;; о--о;:.:. и сумматор соединены со входом второго динамического звена, в каждый квадратурный канал введены два блока коррекции, вто рой блок череспериодной компенсации и два сумматора, причем к выходу аналого-цифрового преобразователя первого квадратурного канала подключены первые входы первого к второго блоков коррекции первого квадратур ного канала, к выходу аншюго-хшфровогэ преобразователя второго квадратурного кана ла подключены первые входы первого и второго блоков коррекции второго квадратурного канала, выходы первого блока коррекции первого квадратурного канала и второго блока коррекции второго квадратурного канала через первый дополнительный сумматор первого квадратурного канала подключены ко второму входу первого перемножителя первого квадратурного канала и ко второму входу второго перемножи теля второго квадратурного канала; выхо/.ы первого блока коррекции второго квадратурного капала и второго блока коррекции первэго квадратурного канала через первый дополнительный сумматор второго квадратурного канала подключены ко второму входу второго пере множителя первого квадратурного канала и ко второму входу первого перемножителя второго квадрат фного канала,первый блок череспериодной компенсации первого квадратурного канала включен меясду выходом первого блока коррекции первого- квадратурного какала и первым входом второго дополнительного сумматора первого квадратурного канала; второй блок череспериодной кокшенсации пефвого квадратурного канала включен между в лходом второго блока коррекци первого дсвадратурного канала и первым вхо дом второго дополнительно1о сумматора второго квадратурного канала; первый блок череспери одной компенс цит: второго квадратур ного канала вк-точея между выходом первого блока к or. пел; лик второго квадратурного канала и р/;ч) входом второго допол.нительного с;/мматора второго квадратурного канала; второй блок череспериодной компенсе в- ариг-п квадратурного канала включен :;;:,-кду выходом второго блока коррекции второго квадратурного канала и вторым входом Второго дополнительного сумматора первого квадратурного канала; выход второго дополнительного сумматора первого квадратурного канала соединен с первыми входами пер вого и второго перемножителей первого квад ратурного канала; выход второго дополнитель ного сумматора второго квадратурного канаla соединен с первыми входами первого и второго пере множителей второго квадратурного канала, а первый и второй выходы второго динамического звена соединены соответственно со вторыми входами первых и вторых блоков коррекции каждого квадратурного канала. На чертеже изображена структурная электрическая схема предложенного цифрового автокомпенсатора пассивных помех. Автокомпенсатор содержит два квадратурных канала, в которые входят соответственно фазовые детекторы 1 и 2. Выходы детекторов соединены со входами соответствующих аналого-цифровых преобразователей 3 и 4, К выходу аналого-цифрового преобразователя 3 первого квадратурного канала подключены первые входы первого 5 и второго 6 блоков коррекции первого квадратурного канала, к выходу аналого-цифрового преобразователя 4 второго квадратурного канала подключены первые входы первого 7 и второго 8 блоков коррекции второго квадратурлого канала; выходы первого блока коррекции 5 первого квадратурного канала и второго блока коррекции 8 второго квадратурного канала через первый и дополнительный сумматор 9 первого квадратурного канала подключены ко второму входу первого перемножителя 10 первого квадратурного канала и ко второму входу второго перемножителя 11 второго квадратурного канала; выходы первого блока коррекции 7 второго квадратурного канала и второго блока коррекции б первого квадратурного канала через первый дополнительный сумматор 12 второго квадратурного канала подключены ко второму входу второго перемножителя 13 первого квадратурного канала и ко второму входу первого перемножителя 14 второго квадратурного канала. Первый блок череспери одной компенсации 15 первого квадратурного канала включен между выходом первого блока коррекции 5 первого квадратурного канала и первым входом второго дополнительного сумматора 16 первого квадратурного канала; второй блок череспериодной компенсации 17 nepiBoro квадратурного канала включен гелду выходом второго блока коррекпитт G первого квадратурного канала и ..- .входом второго дополнительного С -.::зтэра 18 второго квадратурного каналаПервый f)i; череспери ЭДНОЙ компенсации 9 второг: .;:.задретурного канала включен ежду первого блока коррекции 7 торог-D квадратурного канала и вторым вхо- :.1 ггс ;гчго дополнительного сумматора 18 :-. ..уого .квадратурного канала; второй блок еги mroufiDHHwi компенсации 20 второго квадратурного канала включен между выходом второго блока коррекции 8 второго квадрату ного канала и вторым входом второго допол нительного сумматора 16 первого квадратур ного канала. При этом все блоки череспериодной компенсации обоих квадратурных каналов согтоят из параллельно соединенных регистра сдвига 21 и перемножителя 22, Выходы которых подключены к сумматору 23своего блока череспериодной компенсации. Выход второго дополнительного сумматора 16 первого квадратурного канала соединен с первыми входами первого 10 и второго 13 перемножителей первого квадратурного канала, выход второго дополнительно- го сумматора 18 второго квадратурного канала соединен с первыми входами первого 14 и второго 11 перемножителей второго квадратурного канала. Выходы первых перемножителей 10 и 14 обоих каналов через первый сумматор 24и первое динамическое звекэ 25 ссецинены с перемножителями 22 блоков череспериодной компенсации 15, 17, 19 и 20 обоих квадратурных каналов, а вь;ходы вто рых перемножителей 11 и 13 квадратурных каналов через второй сумматор 26 соединены со входом второго динамического звена 27, первый и второй выходы которого соединены соответственно со вторыми вх дами первых 5 и 7 и вторых 6 и 8 блоков. коррекции каждого квадратурного канала. Автокомпенсатор работает следующим образом. Входггое напряжение F (i ), представляющее соб;1: в обшем случае адаитивную смесь полезно1 с,;:;ала и помехи, подается на фазовы: :ег- :торы -, 2, опорные напряжения ко.ч)рьгх сдвинуты на 9О вследствие ис пользования фазовращателя 28. Полученные на .те фазовых детекторов 1 и 2 видеонапряжения подаются на аналого-цифровые преобразователи АПЦ) 3, 4 с помощью которых квадратурные составляющие входного воздействия преобразуются к- с1налого- вой формы в цифровую, с выходов АЦП 3 и 4 квадратурные составляющие входного воздействия в цифровой форме подаются соответственно на первые 5 и 7 и вторые G 8 блоки коррекции первого и второго квадр турных каналов, играющие роль перемножителей, на вторые входы которых поступаю со второго динамического звена 27 числовые значения корректирующих величин Cosft t, Si-n .. Блоки череспери одной компенсации (ЧПК 15, 17, 19 и 20, обеспечивающие подавление квадратурных составляющих пассивной п мехи, включают в себя Щ1фровые элементы задерлосл-регистры сдвига 2,1, задерживающие на наименьший период следования псевдослучайную импульсную погледовательность, перемножите ли 22 и сумматоры 23. Для управления цифровыми элементами задержки на их входы подаются тактовые импульсы, совпадаЮЩие с началом периода. Умножение в перемножителях 22 числовых значений входных квадратурных составляющих на коэ(Ь Ьициент гкзлабления Р , который поступает на второй вход этих пере ножителей с первого динамического звена 25, обеспечивает необходимое ослабление в незадержанном канапе. В установившемся режиме коэффициент ослабления Р должен стать равным fcp коэффициенту межд у-периодной корреляции р 1диолокационного фона. Из прямого и задержанного каналов сигналы в цифровой форме поступают на сумматоры 23 блоков ЧПК. Выхоць сумматоров 23 блоков ЧПК попарно соединены со входами вторык дополниTOp.i j IV сумматоров 6 и 18 обоих квадратурных каналов. На выходе вторых дополнител,.,ньх сумматоров 16 и 18 наблюдаются ос:татки после подавления квадратурных сост шляющих пассивной помехи. Для управленпя фазовой системой самонастройки, обеспечивающей равенство fi « - в пифро- ..;о:1 автокомпенсатор пассивных помех введены r, дополнительные сумматоры 9 I 15ьгооые перечп-гожители 11 и 13, вто- jiiDi сух;: атг р ;Jo. второе динамическое звел: -i7. Г:;.;,чю.1.а э1;1ее синусно-косинусный пре:6;-dC: :.:: ОЛЬ, iji-Vспечиваюший вы.числение Cosfi i,, SmJi-i i.. Управление амплитудИ г CiicTe; .Dfi самонастройки, т.е. коэффи;л;йг1О сслабления (5 незадержанного каяо,7а. сгорын в установившемся режиме .; ;жек о;.;7ь равен коэф(|:1ициенту междупериодной корреляции помехи Гер, происходит .в результате введения в цифровой автоком- пегсатор пассивнык помех первьэс дополнительных сумматоров 9 и 12, первых перемнэжителей 1О и 14, первого сумматора 24, первого динамического звена 25. При выполнеткп условия S1 .Г( а это возможно благодаря ра:-,аеленню функций фазовой и амплитудног с .;том са-Очастройки) корректируется Д01111лерэьс1.г, -тастота пассивной помехи, а не набег фазы за период, что обеспечивает более sc|)deivTi;BHV; р.аботу узкопо- лосного цифрового авток.-:пенсатора пассивiPoix помех при пе;:е:,1е1г.;:.м или псевдослучайном периоде лоЕттр- Г; зондирующих импульсов по cpribvr.H. с прототипом в режи11с1лт-.ьаовагп-э новых элементов - первых 9 i; ,12 и вторых 16 и 18 дополнительных устройств, вторых 17 и 20 блоков ЧПК и синусно-косинусного преобразователя во втором динамическом звене 27 позволяет за счет разделения амплитудной и фазовой систем самонастроек корректировать допплеровскую частоту пассивной помехи, а не доп плеровский набег фазы помехи за период повторения. В результате этого улучшается подавление пассивных помех и расширяется область применения узкополосных цифровых автокомпенсаторов пассивных помех в режиме сопровождения при переменном или псевдослучайном периоде повторения зондирующих импульсов. Формула изобретения ЦИФРОВОЙ автокомпенсатор пассивных помех, содержащий первый сумматор, выход которого соединен со входом первого динамического звена, второй сумматор, выход которого соединен со входом второго динамического звена, и два квадратурных канала, каждый из которых содержит фазовый детектор, выход которого соединен со входом ана лого-цифрового преобразователя, блок череспериодной компенсации, состоящий из параллельно соединенных регистра сдвига и перем ножителя, выходы которых подключены к сум матору блока череспериодной компенсации, первый и второй пере множите ли, причем вых ды первых пере множите лей обоих каналов через первый сумматор и первое динамическое звено соединены с пере множителями бпо ков череспериодной компенсации обоих каналов, а выходы вторых перемножителей обоих каналов через второй сумматор соединены со входом второго динамического звена, о тличающийся тем, что, с целью повышения эффективности подавления пассивных помех, в каждый квадратурный канал дополнительно введены два блока коррекции, второй блок череспериодной компенсации и два сумматора, причем к выходу аналого-диф рового преобразователя первого квадратурног канала подключены первые входы первого и второго блоков коррекции первого квадратурного канала, к выходу аналого-цифрового пре образователя второго квадратурного канала подключены первые входы первого и втор ого блоков коррекции второго квадратурного канала, выходы первого блока коррекции первого квадратурного канала и второго блок коррекции второго квадратурного канала через первый дополнительный сумматор первого квадратурного канала подключены ко .второму входу первого перемножителя первого квадратурного канала и ко второму входу второго перемножителя второго квадратурного канала; выходы первого блока коррекции второго квадратурного канала и второго блока коррекции первого квадратурного канала через первый дополнительный сумматор второго квадратурного канала подключены ко второму входу второго перемножителя первого квадратурного канала и ко второму входу первого перемножителя второго квадратурного канала; первый блок череспериодной /.эмпенсации первого квадратурного канала включен между выходом первого блока коррекции первого квадратурного канала и первым входом второго дополнительного сумматора первого квадратурного канала; второй блок череспериодной компенсации первого квадратурного канала включен между выходом второго блока коррекции первого квадратурйого канала и первым входом второго дополнительного сумматора второго квадратурного канала; первый блок череспериодной компенсации второго квадратурного канала включен между выходом первого блока коррекции второго квадратурного канала и вторым входом второго дополнительного сумматора второго квадратурного канала; второй блок череспериодной компенсации второго квадратурного канала включен между выходом второго блока коррекции второго квадратурного канала и вторым входом второго дотголнительного сумматора первого квадратурного канала; выход второго дополнительного сумматора первого квадратурного канала соединен с первыми входами первого и второго перемножителей первого квадратурного канала; выход второго дополнительного сумматора второго квадратурного канала соединен с первыми входами первого и второго перемножителей второго квадратурного канала, а первый и второй выходы второго динамического звена соединены соответственно со вторыми входами первых и вторых блоков коррекции каждого квадратурного канала. Источники информации, принятые во внимание пра экспертизе: 1. Лихарев В. А, Цифровые методы и . Радио, ройства в радиолокации. М., 1970, с. 185, рис, 2.20.
Т
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1974 |
|
SU1839793A1 |
| Устройство для определения модуля междупериодного коэффициента корреляции | 1982 |
|
SU1083205A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| АВТОКОМПЕНСАТОР ПОМЕХ | 1986 |
|
SU1840021A1 |
| Цифровое устройство для подавления пассивных помех | 1977 |
|
SU743208A1 |
| УСТРОЙСТВО АДАПТИВНОЙ РЕЖЕКЦИИ ПАССИВНЫХ ПОМЕХ | 1981 |
|
SU1098399A1 |
| Устройство для подавления пассивных помех | 1977 |
|
SU687941A2 |
| Цифровое устройство для селекции движущихся целей | 1980 |
|
SU1841289A1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |