Активные шумовые помехи создают большие проблемы в работе РЛС по обнаружению воздушных целей [1]. Рассмотрим ситуацию, когда на боковые лепестки диаграммы направленности основных каналов действует один фиксированный в пространстве постановщик АШП, сигналы которого имеют стационарные гауссовские распределения. В режиме кругового обзора из-за вращения ФАР РЛС угловые положения источников АШП изменяются со временем. Также помехопостановщик может перемещаться за период обзора.
Перемещение в пространстве помехопостановщика, а также радиолокационных объектов наблюдения, связанное с динамикой их движения или перемещение локатора на подвижном объекте можно охарактеризовать одним из основных факторов нестационарности сигнально-помеховой обстановки. Нестационарность может вызываться также режимом обзора РЛС, так как в процессе обзора изменяются угловые соотношения между лучом антенны и помехопостановщиком, а, следовательно, и угловое положение нулей диаграммы направленности относительно максимума основного лепестка. Это означает, что нестационарность связана с эффектом несоответствия параметров весовых коэффициентов АКП пространственному положению диаграммы направленности антенны и источника помехи. Это приводит к постепенному ухудшению процедуры компенсации АШП в связи с несоответствием (устареванием) ВК, поэтому их необходимо периодически обновлять (пересчитывать). Регулярный, частый пересчет весовых коэффициентов не всегда приемлем с точки зрения практической реализации, и влечет за собой потерю полезной информации, что приводит к потерям в обнаружении и ухудшению качества межпериодной обработки.
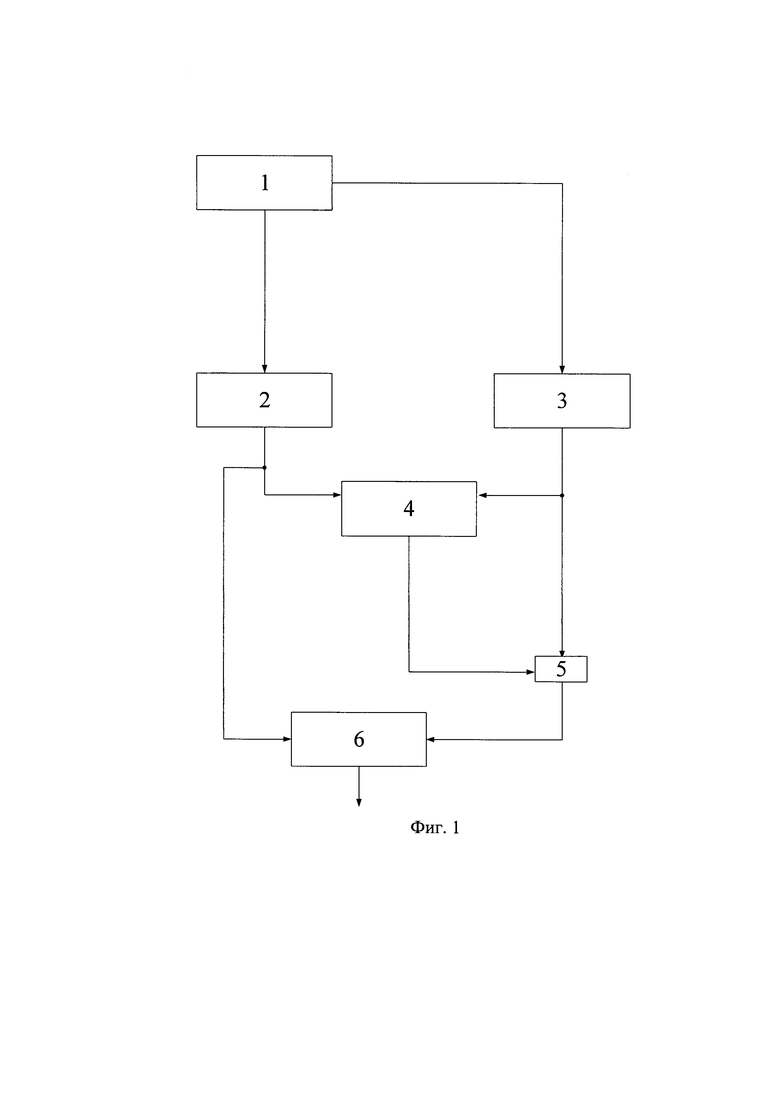
Известен наиболее близкий к предлагаемому способ компенсации активных шумовых помех [2]. Сигналы АШП (фиг. 1), принятые цифровой антенной решеткой 1, поступают на ДОС основного приемного канала 2 и ДОС компенсационных приемных каналов 3. Компенсация АШП осуществляется в основном канале и представляет собой процедуру вычитания 6 взвешенных сигналов компенсационных каналов из основного канала. При этом весовая сумма является оценкой значения активной помехи в данном канале, процесс получения которой осуществляется за три этапа. На первом этапе производится оценивание корреляционной матрицы АШП. На втором этапе применяется метод непосредственного обращения матрицы. Вычисляется оценка матрицы ВК 4 в соответствии с решением Винера-Хопфа [2]. На третьем этапе находится оценка результирующего вектора активной помехи 5 в основном канале и вычитается из процесса в этом канале.
Недостаток известного способа состоит в том, что при изменении угловых перемещений источника помех по отношению к РЛС за период обзора компенсация АШП ухудшается и возрастает остаток не скомпенсированной помехи.
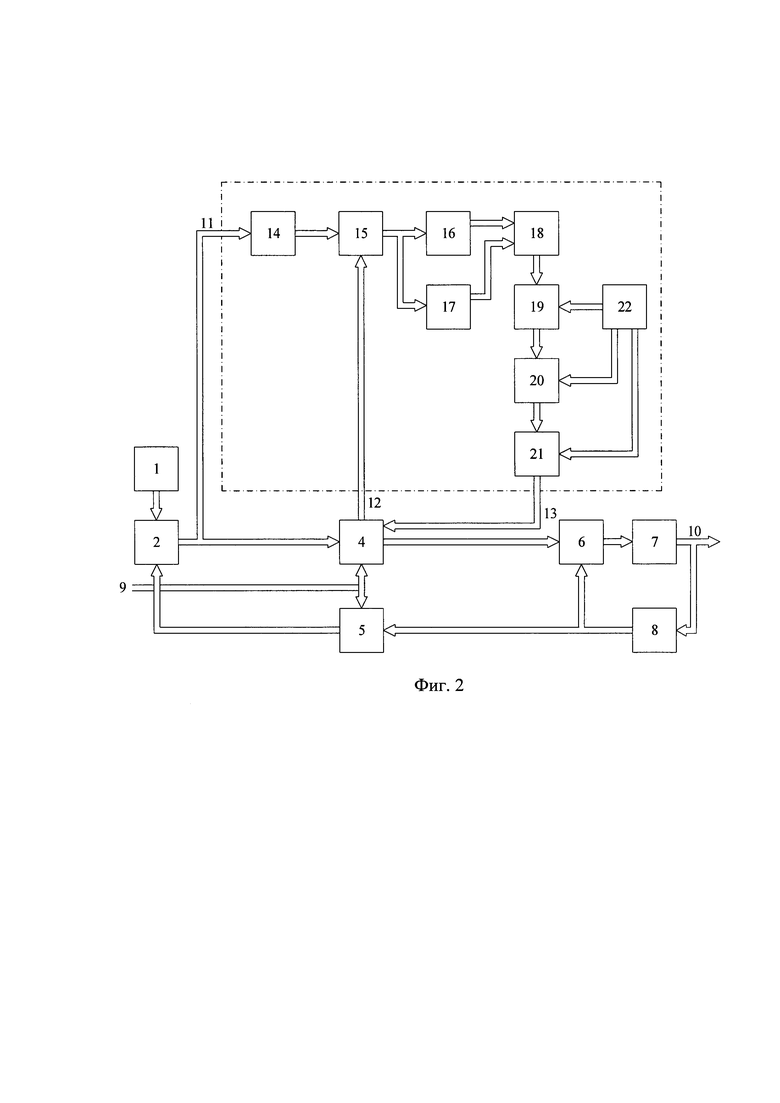
Известно наиболее близкое к предлагаемому устройство [SU 1809401 А1], содержащее (фиг. 2) генератор опорного сигнала 1, блок вычитания 2, блок анализа помеховой обстановки 3 включающий квадратор 14, блок деления 15, М-тактовый блок задержки 16, второй блок вычитания 18, пороговое устройство 19, многоразрядный ключ 20, матричный сумматор 21, накапливающий сумматор 17, постоянное запоминающее устройство 22. Также в состав устройства входит блок формирования матричных коэффициентов передачи калмоновского фильтра 4, блок формирования скалярного произведения 5, блок суммирования 6, блок задержки 7, блок формирования оценки экстраполяции 8.
Однако в известном устройстве повышается устойчивость адаптивного формирования весовых коэффициентов при работе в нестационарной помеховой обстановки, связанной с включением дополнительных источников помех или изменением их интенсивности. При этом в данном устройстве не учитывается нестационарность, связанная с пространственным перемещением источника помех за период обзора.
Для РЛС большой дальности настройка параметров автокомпенсатора за период обзора, как правило, осуществляется либо в конце рабочей дистанции, либо в начале рабочей дистанции перед излучением. При этом ВК рассчитываются и запоминаются в устройстве памяти. Такая процедура настройки обеспечивает минимальные флюктуации оценки ВК, однако обладает плохой устойчивостью в случае несоответствия реальной и вычисленной оценкой ВК от времени.
Для РЛС малой дальности настройка параметров автокомпенсатора осуществляется в специальных служебных азимутальных зонах в пределах общей азимутальной пачки, где излучения не происходит, а работа ведется только на прием. Длительность такой служебной зоны составляет несколько тактов зондирования. Таким способом настройки параметров автокомпенсатора не может компенсироваться АШП до уровня собственного шума основного канала приема из-за быстрого сканирования ДН антенны РЛС или перемещения в пространстве помехопостановщика за время рабочей зоны.
Причиной неэффективной работы автокомпенсатора в РЛС большой и малой дальности является не обновление ВК (не соответствие ВК) с учетом изменения помеховой обстановки и как следствие низкого коэффициента подавления АКП.
Таким образом, решаемой технической проблемой (техническим результатом) является компенсация АШП вследствие сканирования диаграммы направленности антенны РЛС или перемещения в пространстве помехопостановщика за период обзора.
Технический результат достигается тем, что в известном устройстве автокомпенсации АШП с непосредственным обращением корреляционной матрицы помех применяется алгоритм линейной интерполяции весовых коэффициентов, который позволяет уменьшить влияние эффекта устаревания ВК и повысить эффективность работы такого АКП.
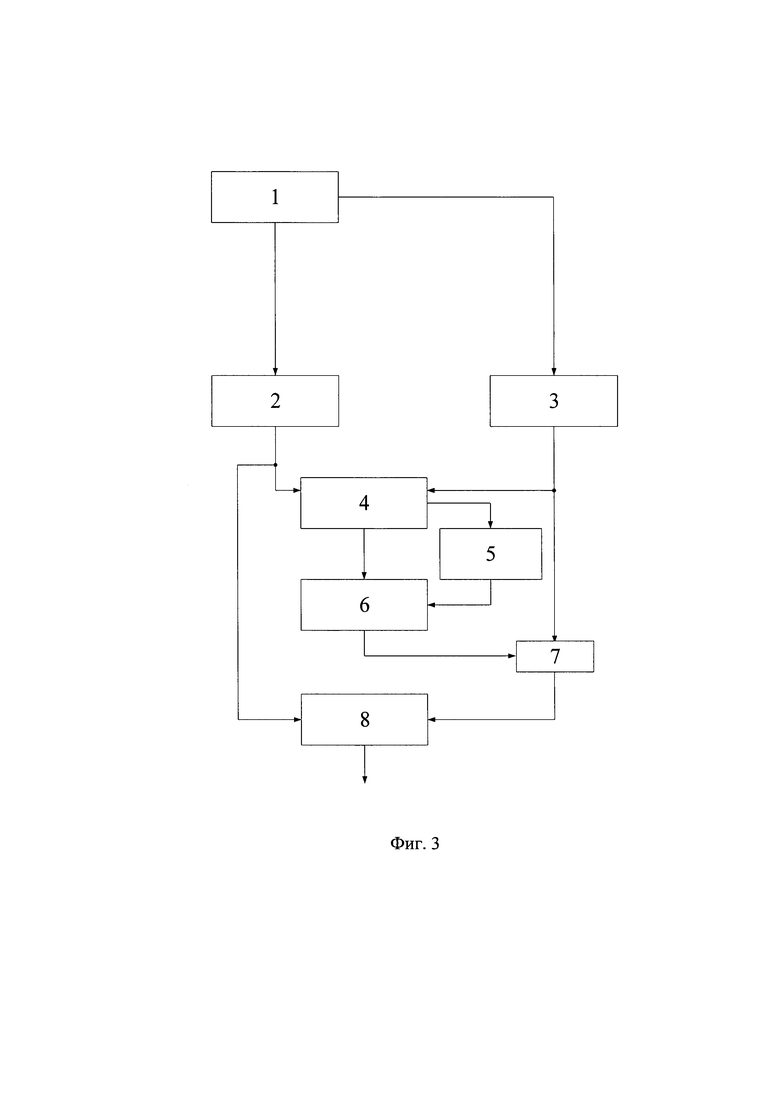
Изобретение иллюстрируется на фиг. 3. Для осуществления заявленного способа формирования весового коэффициента в условиях нестационарности помеховой обстановки РЛС должна содержать фазированную антенную решетку 1, диаграммообразующую систему (ДОС) основного приемного канала 2, ДОС компенсационных приемных каналов 3, АКП, в состав которого входят блок вычисления весовых коэффициентов 4, линия задержки 5, блок линейной интерполяции весовых коэффициентов 6, умножитель 7, блок вычитания 8.
Рассмотрим осуществимость заявленного способа. Сигналы АШП, принятые фазированной антенной решеткой 1, поступают на ДОС основного приемного канала 2 и ДОС компенсационных приемных каналов 3. Усиленные сигналы АШП поступают на первый вход АКП (непосредственно на вход блока вычисления весовых коэффициентов 4), реализуемого программно и работающего по алгоритму обращения матрицы и прямого вычисления вектора весовых коэффициентов. Реализация данного алгоритма требует только знания корреляционной матрицы помех в компенсационных приемных каналах и матрицы взаимной корреляции помехи в основном и компенсационных каналах. Они, как правило, априори неизвестны, но по имеющейся временной выборке помехи можно получить их оценки максимального правдоподобия. Оценка вектора весовых коэффициентов вычисляется в блоке 6.
В блоке линейной интерполяции весовых коэффициентов 6 уменьшается влияние эффекта устаревания ВК и повышается эффективность работы АКП за счет алгоритма линейной интерполяции коэффициентов настройки [4-6], работающего следующим образом:
1. Для РЛС большой дальности в первом периоде работы РЛС ВК настраиваются и запоминаются. Затем излучается и принимается полезный сигнал и в последующем запоминаются все отсчеты по дальности. Далее во втором периоде работы РЛС происходит очередная настройка и запоминание ВК. Для компенсации АШП в первом периоде работы РЛС из ВК вычисленных во втором периоде необходимо вычесть ВК рассчитанных в первом периоде. Для этого вводится линия задержки ВК 5. Полученную разницу ВК разделить на общее количество отсчетов по дальности и получить так называемую весовую добавку. Для формирования новых весовых коэффициентов необходимо к ВК вычисленных в первом периоде прибавить произведение весовой добавки и текущего номера отсчета по дальности.
2. Для РЛС малой дальности в первой служебной зоне ВК настраиваются и запоминаются. В служебной зоне РЛС не излучает, а работает только на прием, длительность служебной зоны составляет несколько периодов зондирования импульсов. Излучается и принимается полезный сигнал в первой рабочей зоне. В рабочей зоне РЛС происходит излучение зондирующих импульсов, настройка ВК не осуществляется, длительность рабочей зоны составляет десятки периодов зондирования импульсов. Далее во второй служебной зоне происходит очередная настройка и запоминание ВК. Для этого вводится линия задержки 5. Вычисляется разница ВК. Полученную разницу ВК необходимо умножить на количество отсчетов настройки первой половинной рабочей зоны и прибавить к ВК до середины рабочей зоны, а после середины рабочей зоны умножить на следующие отсчеты настройки второй половинной рабочей зоны в обратном порядке и прибавить уже к весовому коэффициенту второй служебной зоны. Таким образом, чтобы скомпенсировать помеху в первой рабочей зоне, необходимо проводить подстройку ВК во второй рабочей зоне.
В умножителе 7 осуществляется вычисления оценки помехового воздействия. В блоке вычитания 8 происходит вычитание из помехи в основном канале ее оценки, формируемой как функция от значений помехи в компенсационных каналах.
Таким образом, решается проблема компенсации АШП при работе автокомпенсатора в условиях нестационарной помеховой обстановки, связанных со сканированием диаграммы направленности антенны РЛС или перемещения в пространстве помехопостановщика за период обзора.
СПИСОК ЛИТЕРАТУРЫ
[1] Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 496.
[2] Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию. М.: Радио и связь, 1986. 448 с.
[3] А.с. SU 1809401 А1 СССР, МКИ G01S 7/36 / Устройство формирования весовых коэффициентов в условиях нестационарной помеховой обстановки / А.А. Адаменко, В.А. Дорощук, В.И. Шандрык, Ю.М. Гвоздь (СССР). - №4902005/09; заявл. 11.01.91; опубли. 15.04.93, Бюл. №14 - 6 с.
[4] Фитасов Е.С., Насонов В.В., Гусева Ю.С., Козлов С.А. К вопросу оценки эффективности работы автокомпенсатора активных шумовых помех при пространственном перемещении помехопостановщика // Радиотехнические и телекоммуникационные системы. 2019 г. №2 (34). С.21-29.
[5] Козлов С.А., Фитасов Е.С., Василенко Е.В., Насонов В.В. Повышение эффективности автокомпенсации шумовых активных помех в радиолокационных станциях малой дальности // Вестник Концерна ПВО «Алмаз-Антей» №1(9), ОАО «Концерн ПВО «Алмаз-Антей», 2013. С. 45-48.
[6] Насонов В.В., Журавлев И.В., Фитасов Е.С. Повышение эффективности работы автокомпенсатора с непосредственным обращением корреляционной матрицы помех при пространственном перемещении помехопостановщика // Вестник Ярославского зенитного ракетного института противовоздушной обороны: сб. научных трудов / ЯЗРИ ПВО - Ярославль, 2003. - Вып. 5. - с. 90-101.
Изобретение относится к радиолокации и может использоваться в радиолокационных приемных устройствах обработки радиосигналов РЛС для зашиты от непрерывных активных шумовых помех (АШП), приходящих с направлений, отличных от направлений прихода полезных сигналов на фоне быстрых изменений помеховой обстановки. Технический результат - компенсация активной шумовой помехи при работе автокомпенсатора в условиях нестационарной помеховой обстановки, связанной со сканированием диаграммы направленности антенны РЛС, или перемещения в пространстве помехопостановщика за период обзора. Указанный технический результат достигается тем, что в способе компенсации АШП РЛС, основанном на приеме радиосигналов основным и дополнительными каналами, на настройке параметров автокомпенсатора помех (АКП), обеспечивающего вычитание сигналов, принимаемых с направления на источник помех, изменяют настройку параметров автокомпенсатора за счет использования алгоритма линейной интерполяции настройки весовых коэффициентов (ВК), который учитывает сканирование диаграммы направленности антенны РЛС или пространственное перемещение источника помех за период обзора. 2 н.п. ф-лы, 3 ил.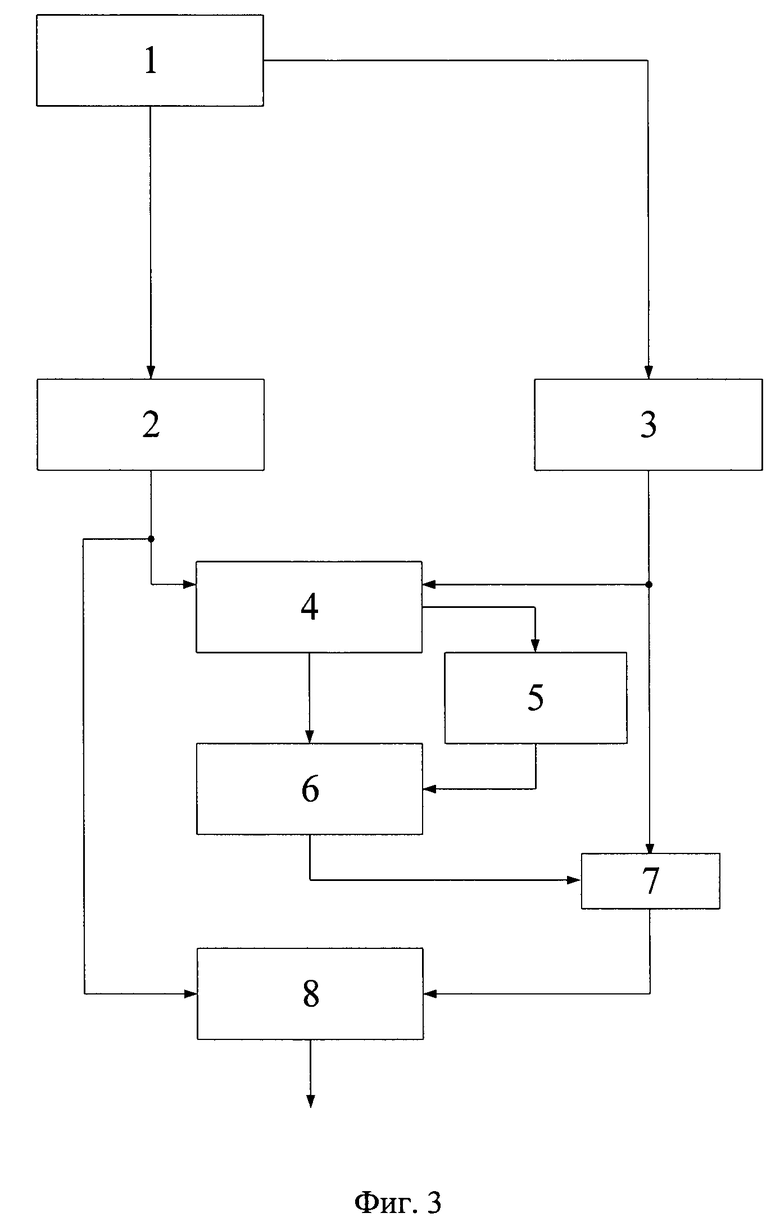
1. Способ формирования весового коэффициента в условиях нестационарности помеховой обстановки, основанный на настройке параметров автокомпенсатора с непосредственным обращением корреляционной матрицы помех, реализующий вычитание сигналов, принимаемых с направления на источник помех, отличающийся тем, что перед очередным периодом обзора радиолокационной станции большой дальности в автокомпенсаторе реализуется процедура линейной интерполяции весовых коэффициентов, заключающаяся в настройке и запоминании весовых коэффициентов на первом периоде обзора, излучают и принимают полезный сигнал в первом периоде обзора, далее во втором периоде обзора происходит очередная настройка и запоминание весовых коэффициентов, по полученным значениям вычисляют разницу весовых коэффициентов и делят на общее количество отсчетов по дальности, вычисленное умножают на значение текущего номера отсчета по дальности, полученное произведение прибавляют к весовым коэффициентам первого периода обзора, после чего компенсируют помехи в первом периоде обзора.
2. Способ формирования весового коэффициента в условиях нестационарности помеховой обстановки, основанный на настройке параметров автокомпенсатора с непосредственным обращением корреляционной матрицы помех, обеспечивающий вычитание сигналов, принимаемых с направления на источник помех, отличающийся тем что перед очередным периодом обзора радиолокационной станции малой дальности в автокомпенсаторе реализуется процедура линейной интерполяции весовых коэффициентов, заключающаяся в настройке и запоминании весовых коэффициентов в первой служебной зоне, излучают и принимают полезный сигнал в первой рабочей зоне, далее во второй служебной зоне происходит очередная настройка и запоминание весовых коэффициентов, по полученным значениям вычисляют разницу весовых коэффициентов и умножают на количество отсчетов настройки первой половины рабочей зоны, прибавляют к весовым коэффициентам первой служебной зоны до середины рабочей зоны, а после середины рабочей зоны умножают на следующие отсчеты настройки второй половины рабочей зоны в обратном порядке и прибавляют к весовым коэффициентам второй служебной зоны.
| Устройство формирования весовых коэффициентов в условиях нестационарной помеховой обстановки | 1991 |
|
SU1809401A1 |
| Устройство формирования весовых коэффициентов автокомпенсаторов помех | 1983 |
|
SU1145315A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ВЕСОВЫХ КОЭФФИЦИЕНТОВ АВТОКОМПЕНСАТОРОВ ПОМЕХ | 1987 |
|
SU1840025A1 |
| US 5351058 A1, 27.09.1994. | |||

