Известны способ и реализующее его устройство для управления тормозной системой, характеризуемые признаками, включенными в ограничительную часть пп. 1, 6, 7 и 8 формулы изобретения.
Качество торможения транспортного средства антиблокировочной (ABS) системой и реакции педали зависят от того, с какой скоростью достигается необходимый оптимальный уровень давления, причем амплитуда модуляции давления должна быть очень малой. Амплитуда модуляции давления существенно зависит при этом от величины предшествующего уменьшения давления или от того, насколько велика продолжительность управления выпускным клапаном.
Для расчета времени управления выпускным клапаном известен, например, способ, при котором это время может быть изменено посредством значения, полученного на предшествующем этапе регулирования, скорректированного постоянной величиной и в зависимости от текущих параметров движения колеса.
Известен также способ, при котором используют такое же значение времени, полученное на предшествующем этапе регулирования, однако вычисляют его с поправочным коэффициентом, зависящим от ускорения колеса на предыдущем цикле регулирования, причем этот поправочной коэффициент обратно пропорционален ускорению колеса.
Недостаток этих известных решений в том, что уменьшение давления не согласуется полностью с физической характеристикой движения колеса из-за постоянно имеющегося времени задержки системы или в том, что за счет помех, обусловленных состоянием проезжей части, ABS-система, например, при небольших значениях компенсации ускорений колеса реагирует с колебаниями регулирования, так что цель обеспечения небольшой модуляции давления не достигается.
Эти недостатки устраняются предложенной тормозной системой тем, что определяют ускорение колеса и проскальзывание в нестабильной области и устанавливают их соотношение с заданными величинами, а время уменьшения давления для нового цикла регулирования вычисляют таким образом, что устанавливаемое вслед за уменьшением давления ускорение колеса соответствует предварительно вычисленной величине.
Изобретение исходит при этом из тормозной системы, преимущественно с использованием антиблокировочной системы, для колес транспортного средства, состоящей из датчиков для определения характера движения колес, схемы для обработки сигналов датчиков и для вырабатывания сигналов управления тормозным давлением, а также из блока управления тормозным давлением, к которому подают сигналы управления тормозным давлением для изменения давления. При этом могут быть сформированы сигналы проскальзывания и сигналы ускорения по меньшей мере для одного колеса или группы колес. Изобретение отличается тем, что сигналы управления тормозным давлением определяют таким образом, что ускорение по меньшей мере одного колеса ограничивают значениями, которые зависят от максимального значения проскальзывания в пределах задаваемого интервала времени. Для этого в пределах задаваемого интервала времени из сигналов проскальзывания можно определить максимальное значение проскальзывания. Сигналы управления тормозным давлением определяют тогда таким образом, чтобы ускорение по меньшей мере одного колеса было ограничено значениями, зависящими от максимального значения проскальзывания.
Особенно предпочтительно, что для изменения давления вырабатывают сигналы управления тормозным давлением, длительность которых определяют в зависимости от полученного максимального значения проскальзывания.
Кроме того, в предпочтительном примере выполнения изобретения может быть предусмотрено, что для определения продолжительности сигналов управления тормозным давлением формируют основное значение длительности и корректирующее значение для коррекции основного значения длительности, причем корректирующее значение определяют в зависимости от полученного максимального значения проскальзывания.
Задаваемый интервал времени может соответствовать циклу регулирования. Упомянутое корректирующее значение служит тогда для корректировки основного значения длительности изменения давления в следующем цикле регулирования.
Далее предпочтительно, что в пределах задаваемого интервала времени из сигналов ускорения по меньшей мере одного колеса или группы колес получают максимальное значение ускорения. Из полученного максимального значения проскальзывания получают тогда скорректированное заданное значение для ускорения колеса или колес, после чего это заданное значение сравнивают с полученным максимальным значением ускорения. В зависимости от разности между полученным максимальным значением ускорения и скорректированным заданным значением можно получить тогда корректирующее значение.
Другие предпочтительные варианты воплощения изобретения приведены в описанных ниже примерах его осуществления.
Изобретение поясняется чертежом.
Сигналы датчиков 1 и 2 колес одной оси обрабатываются в блоке 3 обработки. В нем в зависимости от полученного характера движения колес вырабатываются сигналы управления тормозным давлением для соответствующих колесам 3-линейных 3-позиционных клапанов 4 и 5 управления тормозным давлением. Блок обработки вычисляет среди прочего длительность управления (TVAl) для отдельных клапанов 4 и 5.
Нижеследующее описание относится к одному из колес. Такое же устройство предусмотрено и для другого колеса. Описанная ниже схема корректировки является фактически частью блока 3 обработки.
Блок обработки выдает по линии 6 значение длительности (TVAl) сигнала уменьшения давления на блок 7 вычитания, который корректирует эту длительность и возвращает скорректированный сигнал в блок 3 обработки.
Для определения корректирующего значения блок 3 обработки вырабатывает и выдает вычисленное значение проскальзывания (SR1) колеса и значение повторного ускорения (AR1) колеса. SR1 можно, например, известным образом определить по измеренной скорости Vr колеса и продольной скорости Vf транспортного средства по уравнению SR1 = (Vf - Vr)/Vf. Повторное ускорение колеса или ускорение колеса может быть получено путем временного дифференцирования числа оборотов колеса или скорости Vr колеса.
В блоках 8 и 9 за один цикл регулирования определяют и накапливают соответственно максимальное значение SRIM и ARIM этих величин. На клемме 14 задают заданное значение проскальзывания (SRS), например 7%. Блок 10 вычитания формирует разность DSR = (SR1M-SRS)•C1 + C2, где C1 и C2 - постоянные системы, которые могут составлять, например, соответственно 0,7 и 0. По разности DSR в передаточное звено 11 с линейной функцией ARS = f(DSR) определяют заданную величину ARS ускорения колеса. В блоке 12 вычитания эту заданную величину сравнивают с полученным максимальным AR1M. Разность DAR = (AR1M - ARS)•C3 поступает на передаточное звено 13, которое формирует из нее посредством линейной функции TVAK = f(DAR) корректирующее значение (TVAK) для длительности сигнала уменьшения давления, поступающее на блок 7 вычитания. DAR может составлять, например, 1g, тогда TVAK = 3 мс; C3 может составлять, например, 3 мс/g.
Ниже описана немного видоизменения корректировка. По отклонению проскальзывания DSR = SR1M - SRS вычисляют корректирующее значения (ARK) для заданного значения повторного ускорения колеса, причем SRS по отношению к опорной скорости задают, например, как 5% : ARK = DSR • C'1 . С помощью корректирующего значения ускорения колеса корректируют заданное значение ускорения. Постоянная C'1 имеет, например, величину 0,7%/g.
ARS = ARK + C'2.
Таким образом, в распоряжении имеется заданное значение ARS ускорения колеса; постоянная C'2 может составлять, например, 3,5g.
DAR = AR1M - ARS
DAR в качестве результата сравнения фактического и заданного значений пересчитывают с постоянной C3 в значение времени корректировки для последующего уменьшения давления.
TAVK = DAR • C3
Подходящей величиной является, например, C3 = 4 мс/g.
Если, например, предельные значения приработки колеса составляют SR1M = 9% и AR1M = 8g, то поправку времени уменьшения давления, посредством которой исходя из прежнего значения, вычисляют следующее уменьшение давления, рассчитывают следующим образом:
DSR = 9% - 5% = 4%,
ARK = 4% • 0,7g/% = 2,8g,
ARS = 3,5g + 2,8g = 6,3g,
DAR = 8g - 6,3g = 1,7g,
TAVK = 1,7g • 4 мс/g = 6,8 мс.
Поскольку предшествующее уменьшение давления было слишком велико, колесо при значении 8g имело слишком большое повторное ускорение, поэтому новое уменьшение давления инициализируют примерно на 7 мс меньше, чем старое
TAV = TAV1 - 7 мс
Резюмируя, можно сказать, что ABS-система согласно изобретению состоит из датчиков для определения характера движения колеса, блока обработки для обработки сигналов датчиков и для выработки сигналов управления тормозным давлением, а также из блока управления тормозным давлением, к которому подают сигналы управления тормозным давлением для варьирования давления. При этом образуют сигналы проскальзывания, а также сигналы ускорения и замедления колес или групп колес и вырабатывают сигналы уменьшения давления, длительность (TAV1) которых определяют в блоке обработки. Сущностью изобретения является то, что каждый раз в течение одного цикла регулирования определяют максимальное значение (SR1M) проскальзывания и максимальное значение (AR1M) повторного ускорения колеса и что по максимальному значению (SR1M) проскальзывания получают скорректированное заданное значение (ARS) ускорения колеса, которое сравнивают с максимальным значением (AR1M) повторного ускорения колеса и посредством разности (DAR) формируют корректирующее значение TAVK = f(DAR) для длительности (TAV1) импульса уменьшения давления в следующем цикле регулирования, посредством которого корректируют длительность (TAV1) уменьшения давления (TAV = TAV1 - TAVK)).
Описана тормозная система, вычисляющая длительность сигнала уменьшения давления. При этом определяют ускорения колеса (или повторное ускорение колеса) и проскальзывание в нестабильной области колеса и устанавливают их взаимосвязь с заданными величинами, откуда осуществляют расчет времени уменьшения давления для нового цикла регулирования таким образом, что следующее за уменьшением давления повторное ускорение колеса соответствует предварительно вычисленной величине. Эту длительность сигнала корректируют, чтобы уменьшить амплитуду модуляции давления.
Способ и устройство предназначены для вычисления длительности сигнала уменьшения давления. При этом определяют ускорение колеса (или повторное ускорение колеса) и проскальзывание в нестабильной области и устанавливают их взаимосвязь с заданными величинами, из чего расчет времени уменьшения давления нового цикла регулирования производят таким образом, что следующее за уменьшением давления повторное ускорение колеса соответствует предварительно вычисленной величине. Эту длительность сигнала корректируют для уменьшения амплитуды модуляции давления. 4 с. и 4 з.п. ф-лы, 1 ил.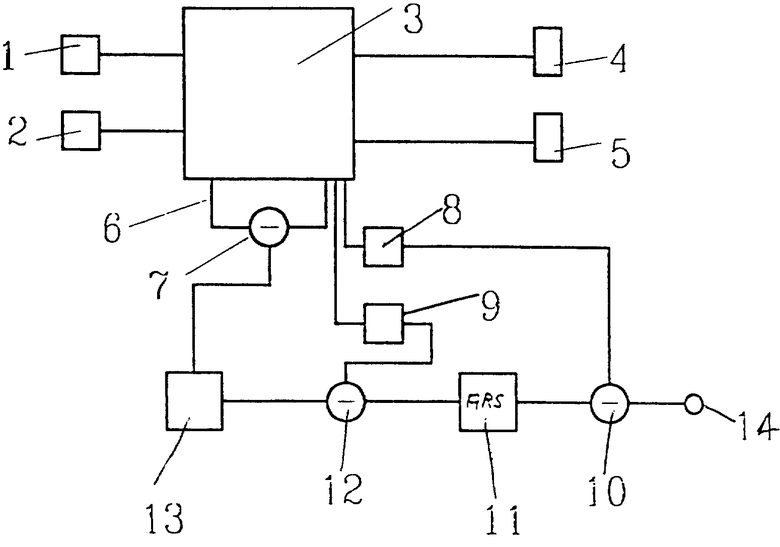
| WO, заявка, 90/06869, B 60 T 8/32, 1990. |

