Предлагаемый стенд (тренажер) для экспресс диагностики тормозной системы транспортных средств предназначен для диагностики транспортных средств во время их движения.
Изобретение относится к транспортному машиностроению и может быть использовано для проверки как эффективности торможения и устойчивости автотранспортного средства при торможении, так и способности использования тормозной системы его водителем.
Известны стенды для диагностирования тормозов транспортных средств, однако они прототипами предлагаемой станции быть не могут, так как они предназначены для работы в стационарных условиях.
Недостатками известных стендов являются большая трудоемкость и длительность диагностирования, связанная с необходимостью неподвижной установки автомобиля для проведения измерений. Кроме того, результаты, полученные на указанном стенде, косвенно отражают реальную работу тормозной системы, что значительно снижает достоверность диагностики.
Целью настоящего изобретения является снижение трудоемкости, значительное увеличение количества диагностируемых автомобилей, повышение точности и объективности контроля, обеспечение возможности оценки действий водителя в сложной дорожной ситуации, требующей торможения.
Для обеспечения поставленной цели создается проездной путь, по которому проезжает автомобиль во время движения. Он представляет собой крытое помещение, с обеих сторон которого имеются ворота для въезда и выезда автомобиля. На пути движения автомобиля устанавливается система электронных датчиков, сигналы с которой подаются на компьютер, который по определенному алгоритму и по заданной программе обеспечивает сообщения: тормозной путь положительный/отрицательный); линейное отклонение (положительное/отрицательное).
В дополнение к этому в задачу стенда включается определение параметров схемы тормозной диаграммы (фиг. 1), способности использования водителем тормозной системы.
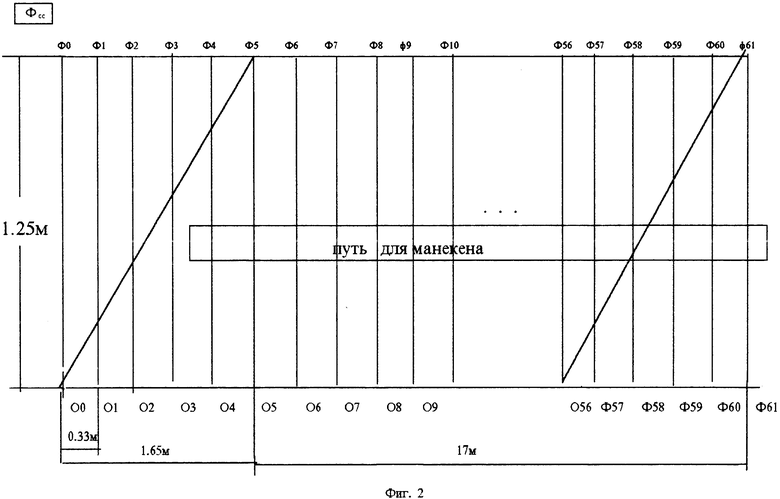
На фиг. 1 показана тормозная диаграмма, на фиг. 2 - стенд в плане.
В качестве примера рассмотрим применение фотодатчиков. Проездной путь в этом случае имеет П-образную направляющую платформу для правых или левых колес, на которой через равные отрезки длины на боковинах устанавливается N осветителей и N фотоэлементов, линии действия которых перпендикулярны направлению движения, и М фотоэлементов, линии действия которых направлены под углом α к направлению движения (число N определяется необходимой точностью измерения времени срабатывания, запаздывания и нарастания замедления тормозной системы и тормозного пути, число М и угол α определяются точностью определения линейного отклонения). Между платформами на поверхности качения стационарно или на некотором углублении на подвижной тележке, установленной на рельсах, перемещение которой управляется по программе компьютером, устанавливается манекен человека, который так же по программе с компьютера может подниматься, ложиться и выполнять другие действия, моделирующие человека на проезжей части дороги.
ГОСТ N 25478-91 "Автотранспортные средства, требования к техническому состоянию по условиям безопасности движения" предусматривает следующие требования к тормозному управлению для легковых автомобилей, производство которых было начато до 01.01.81 г. (наиболее неудобный случай):
начальная скорость ν0 40 км/ч = 11,1 мм/с;
тормозной путь не более St 16,2 м;
(принимаем с учетом + 5%) 17,0 м;
установившееся замедление не менее jуст 6,1 м/с2;
(принимаем с учетом - 4%) 5,86 м/с2;
время запаздывания тормозной системы τc 0,2 с;
время срабатывания тормозной системы не более τcp 0,6 с;
(принимаем с учетом +0,03 с) 0,63 с;
отклонение не более 1,25 м;
погрешности измерения:
тормозного пути и отклонения +/-5,00%;
времени срабатывания, запаздывания и нарастания замедления тормозной системы +/-0,03 с;
установившиеся замедления +/-4,0%.
Для транспортных средств, производство которых было начато после 01.01.81 г. St должно быть не более 12,9 м.
На фиг. 2 показана схема расположения датчиков на проездном пути. Фотодатчики Ф0-Ф5 в основном предназначены для определения времени реакции водителя tврв; но могут быть использованы и для измерения времени срабатывания, запаздывания и нарастания замедления тормозной системы; осветитель O01 и фотоэлемент Ф5 предназначены и для измерения первоначального (исходного) отклонения Oи, фотодатчики Ф6-Ф10.
Расстояние между датчиками Фn-Фn-1 взято равным ν0 * 0,03 = 0,33 м.
Въезжая на проездной путь, автомобиль пересекает линию действия фотодатчика Ф0, сигнал от которого поступает на компьютер, который своим сигналом в момент времени to ставит манекен в вертикальное положение на расстоянии Lm от Ф0. Это расстояние может изменяться в зависимости от результатов диагностики. Заметив манекен, водитель нажимает на тормозную педаль в момент tcc. Загорание лампы включателя стопсигнала индикатируется специальным фотоэлементом Фсс, сигнал с которого поступает на компьютер. Компьютер вычисляет: время реакции водителя на сигнал опасности tврв=tcc-to. Поскольку момент времени tcc может произойти в любое время при проезде между Ф1 - Ф5, первый пересекаемый после момента tcc фотодатчик должен уже использоваться для измерения времени запаздывания тормозной системы τc (фиг. 1), т.е. превратиться в нулевой или в дальнейшем Ф5 сделать нулевым (учитывается алгоритмом обработки). Нами принято: максимальное время реакции водителя 0,2 с и поэтому "обслуживается" оно шестью фотодатчиками ФО-Ф5 (L5 = 1/65 м).
Отклонение Oи определяется в момент пересечения линии действия фотодатчика Ф05 (t05), наступающий после пересечения линии действия датчика Ф0:
Oи= ν0•t05•tgα,
Применимая α = 45°
Oи= ν0•t05
ГОСТом параметр τc регламентируется величиной 0,2 с (Lс=1,65 м.) Таким образом, все что было сказано относительно работы схемы на отрезке расположения фотодатчиков Ф0-Ф5 относится и к работе на отрезке расположения фотодатчиков Ф6-Ф10. Здесь уменьшением скорости автомобиля можно пренебречь и считать ее равной также начальной скорости.
Изменение скорости начинается после пересечения линии действия фотодатчика Ф10, принимая максимальную величину времени нарастания замедления τн= (τcp-τc)+0.03 = 0.43 с, найдем скорость для этого момента времени (tн):
Принимая среднюю скорость равной (11,1+8,6)/2 = 9,8 м/с, можно найти расстояние, которое может пройти автомобиль (9,8•0,43)=4,2 м. Для индикации участка τн потребуется (4,2/0,33=12,7) тринадцать фотодатчиков. Таким образом, за время τcp автомобиль может пройти путь (4,2+1,65)6,15 м. Итак,до конца испытаний автомобиль должен пройти еще путь, не больший (17,0-6,15) 10,85 м. Этот путь он должен пройти за время: t = S/ν = νк-νtн/(jуст-0.24). Так как νк= 0 , то t = 8,6/5,86=1,46 с. Для индикации потребуется еще (10,85/0,33) 33 датчика. Как уже говорилось, во время диагностики манекен перемещается в зависимости от результатов диагностики. В частности, когда временные характеристики движения автомобиля не укладываются в норму, манекен приближается к автомобилю так, что в конце концов автомобиль наезжает на манекен и он убирается. В момент наезда tав диагностика прекращается. Выдается световой и звуковой сигналы. Автомобиль набирает скорость и освобождает проездной путь. Водителю выдаются сведения о проведенной диагностике и рекомендации по проведению тормозной системы в нормальное состояние. При положительных показателях диагностики, близких к граничным, манекен отодвигается и устанавливается на линии 17 м.
Проверка линейного отклонения в конце диагностики осуществляется датчиком, образованным осветителем Oт=5 и фотоэлементом Фт=5 в момент tт=5 по формуле:
Oт=5= νт=5(tт=5-tn).
Всего должен быть использован (34+13+11+3) 61 датчик.
Длительность диагностики (0,2+0,2+0,43+1,46) 2...3 с.
Итак, алгоритм обработки результатов измерений следующий:
1. На интервале Ф0-Ф5 измеряется время tврв и корректируется программным путем начало отсчета времени запаздывания тормозной системы. Манекен сдвигается во время окончания диагностики влево на корректируемую величину.
2. На интервале Ф5-Ф10 (определение запаздывания тормозной системы τc (фиг. 2) по разности отсчетов моментов времени пересечения линий действия соседних фотодатчиков определяется скорость движения автомобиля и сравнивается со скоростью предыдущего измерения. Если разность окажется отрицательной, то фиксируется момент времени tн и начинается определение времени нарастания замедления τн. Так же определяется линейное отклонение.
3. На интервале Ф10 - Ф23 так же по разности отсчетов моментов времени пересечения линий действия соседних фотодатчиков определяется скорость движения автомобиля, которая затем сравнивается со скоростью предыдущего измерения. Если разность окажется равной нулю, то величина текущей скорости сравнивается с величиной 8,6 м/с. Если разность окажется положительной, фиксируется момент времени ty и начинается определение времени установишегося замедления τуст . На световом табло результатов диагностики появится сообщение: Установившееся замедление + .
4. На интервале Ф23 - Ф56 так же по разности отсчетов моментов времени пересечения линий действия соседних фотодатчиков определяется скорость движения автомобиля. Если она окажется равной нулю, то компьютер фиксирует номер последнего пересеченного датчика, определяет длину тормозного пути и выводит на световом табло сообщение:
Тормозной путь +
На интервале Ф50 - Ф56 автомобиль пересекат линию действия фотодатчика Ф50-56 и определяется линейное отклонение. В результате этого вычисляется разность, на основании которой на световое табло выводится сообщение:
Линейное отклонение (устойчивость) +
Световое табло выводит отрицательный знак в тех случаях, когда измеренные параметры не соответствуют значениям, оговоренным ГОСТом.
Изобретение относится к транспортному машиностроению и касается испытательной техники. Стенд (тренажер) для экспресс-диагностики тормозной системы транспортных средств содержит установленные на пути движения автомобиля электронные датчики, сигналы с которых через блок подготовки данных передаются на компьютер и которые затем обрабатываются по определенной программе и заданному для диагностики алгоритму. Стенд позволяет проверить эффективность торможения и устойчивость транспортного средства при торможении. 1 з. п.ф-лы, 2 ил.
| RU, N 2033601, A, 20.04.94 | |||
| RU, ГОСТ N 25478-91 "Автотранспортные средства, требования к техническому состоянию по условиям безопасности движения". |
