(54) СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к транспортному машиностроению и может быть использовано для определения схождения управляемых колес транспортных средств.
Известен стенд для определения схождения управляемых колес транспортного средства, содержащий основание, платформы для управляемых колес, связанные с основанием, датчики перемещения, установленные на основании, схему обработки сигналов датчиков и блок регистрации результатов обработки 1.
Недостатком известного стенда является низкая точность определения схождения, обусловленная перемещением платформы в поперечном направлении при проезде по ней управляемого колеса. Возникающие при перемещении платформы силы трения вносят погрешность в определение схождения. Кроме того, подвижность платформы в поперечном направлении искажает условия качения управляемого колеса в сравнении с условиями качения управляемого колеса по неподвижной дороге.
Цель изобретения - повыщение точности определения схождения управляемых колес.
Эта цель достигается тем, что платформы неподвижно установлены на основании, а датчики перемещения выполнены в виде расположенных на одном уровне осветителей и фотоэлементов, при этом по одну сторону
5 каждой платформы последовательно размещено, по крайней мере, два осветителя, а по другую сторону, по крайней мере, три фотоэлемента, причем первый осветитель и один из фотоэлементов размещены в передней части платформы на линии, перпендикулярной направлению движения транспортного средства, а второй осветитель и два других фотоэлемента - на линиях, неперпендикулярных направлению движения транспортного средства, кроме того, на одной из платформ
15 перед первыми осветителем и фотоэлементом размещены дополнительные осветитель и фотоэлемент, установленные на линии, параллельной линии расположения первых осветителя и фотоэлемента, а в схему обра2Q ботки сигналов датчиков включены преобразователь сигналов фотоэлементов в импульсы, длительность которых пропорциональна времени между сигналами последовательно расположенных фотоэлементов, преобразователь длительности импульсов в пропорциональное ей число импульсов, подключенный к выходу преобразователя сигналов фотоэлементов в импульсы, и вычислительное устройство, вход которого подключен к выходу преобразователя длительности импульсов, а выход - на вход блока регистрации результатов обработки.
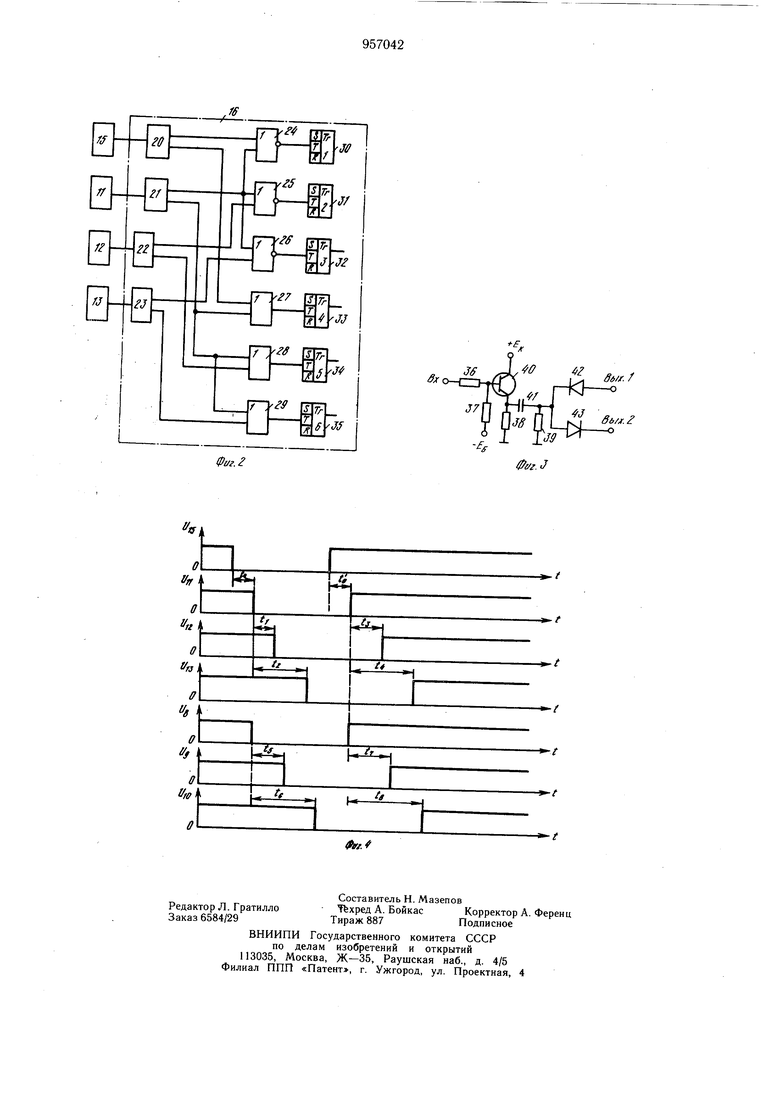
На фиг. 1 изображена общая схема стенда; на фиг. 2 - структурная схема преобразователя сигналов фотоэлементов в импульсы; на фиг. 3 - принципиальная схема усилителя-формирователя; на фиг. 4 - диаграмма изменения напряжения на выходах фотоэлементов.
На основании I закреплены неподвижные платформы 2 и 3 для управляемых колес транспортного средства (не показано). Неподвижные платформы 2 и 3 могут быть выполнены, например, в виде U-образных балок, з-акрепленных на основании. На основании 1 по одну сторону платформ 2 и 3 размещено по два осветителя 4, 5 и 6, 7 и по три фотоэлемента 8-10 и 11 -13. Осветители 4 и 6 и фотоэлементы 8 и 12 расположены на линиях, перпендикулярных направлению движения транспортного средства. На платформе 2 перед осветителем 6 и фотоэлементом 11 размещены соответственно дополнительные осветитель 14 и фотоэлемент 15, расположенные на линии, параллельной линии расположения осветителя 6 и фотоэлемента 11. Схема обработки сигналов фотоэлементов содержит преобразователь 16 сигналов фотоэлементов в импульсы, длительность которых пропорциональна времени между сигналами последовательно расположенных фотоэлементов 8-10 и 15, 11, 12 и 13, преобразователь 17 длительности импульсов в пропорциональное ей число импульсов и вычислительное устройство 18. К выходу вычислительного устройства 18 подключен блок 19 регистрации результатов обработки. На фиг. 2 изображена структурная схема преобразователя 16 для фотоэлементов 15, 11, 12 и 13. Структурная схема преобразователя 16 для фотоэлементов 8- 10 выполнена аналогично. Преобразователь 16 состоит из усилителей-формирователей 20-23, логических элементов ИЛИ-НЕ 24- 26, логических элементов ИЛИ 27-29 и триггеров 30-35. Усилитель-формирователь (фиг. 3) состоит из резисторов 36-39, транзистора 40, конденсатора 41 и диодов 42 и 43.
Предлагаемое устройство работает следующим образом.
Транспортное средство управляемыми колесами проезжает по неподвижным платформам 2 и 3. В момент перекрытия управляемым колесом луча света, идущего от осветителя 4 к фотоэлементу 15, на выходе последнего напряжение становится равным нулю (отрицательный перепад). В результате на первом выходе усилителя-формирователя 20 появляется отрицательный импульс, который поступает на первый вход логического элемента ИЛИ-НЕ 24. С выхода этого эле.мента импульс поступает на счетный вход триггера 30, перебрасывая его из нулевого состояния в единичное. В момент
перекрытия управляемым колесом луча света, идущего из осветителя 6 к фотоэлементу 11, на выходе последнего напряжение падает до нуля (отрицательный перепад). В результате на первом выходе усилителя-фор0 мирователя 21 появляется отрицательный импульс, поступающий одновременно на второй вход логического элемента ИЛИ-НЕ 24 и на первые входы логических элементов ИЛИ-НЕ 25 и 26. С выхода логического элемента ИЛИ-НЕ 24 импульс поступает на
5 счетный вход триггера 30 и перебрасывает его из единичного состояния в нулевое. В результате переброса триггера 30 из нулевого состояния в единичное и из единичного в нулевое на его выходе появится импульс длительностью to (фиг. 4), пропорциональной скорости движения транспортного средства. Импульсы с выходов логических элементов ИЛИ-НЕ 25 и 26 поступают на счетные входы триггеров 31 и 32 и перебрасывают их из нулевого состояния в
5 единичное. В момент перекрытия движущимся управляемым колесом луча света, идущего от осветителя 7 к фотоэлементу 12, на выходе последнего напряжение падает до нуля (отрицательный перепад). В результате на первом выходе усилителя-формирователя 22 появляется отрицательный импульс, который поступает на второй вход логического элемента ИЛИ-НЕ 25, с выхода которого импульс поступает на счетный вход триггера 31 и перебрасывает его из единкч5 ного состояния в нулевое. В результате переброса триг.гера 31 из нулевого состояния в единичное и из единичного в нулевое на выходе триггера 31 появится импульс длительностью ti (фиг. 4), пропорциональной расстоянию БВ. Процесс формирования импульсов на выходе триггеров 32-35 будет происходить аналогично.
Отрицательные перепады напряжений с фотоэлементов 13 и 11 преобразуются в импульс tj (фиг. 4), длительность которого
5 пропорциональна длине ЖИ; положительные перепады с фотоэлементов 15 и 11 - импульс to, длительность которого пропорциональна длине :АБ; положительные перепады с фотоэлементов И и 12 -- в импульс 1з, длительность которого пропорциональна длине ЖЗ; положительные перепады с фотоэлементов 11 и 13 - в импульс t4, длительность которого пропорциональна длине БД; отрицательные перепады с фотоэлементов 8 и 9 - в импульс ts, длительность которого пропорциональна длине СТ; отрицательные перепады с фотоэлементов 8 и 10 - в импульс tg, длительность которого пропорциональна длине ОР; положительные перепады с фотоэлементов 8 и 9 - в импульс tr, длительность которого пропорциональна длине ОП; положительные перепады с фотоэлементов 8 и 9 - в импульс ts, длительность которого пропорциональна длине СФ. Импульсы длительностью to - tg поступают на входы преобразователя 17, который преобразует эти длительности в пропорциональные им числа, которые затем вводятся в вычислительное устройство 18. Вычислительное устройство 18 по этим числам определяет схождение всех управляемых колес по формуле ЕСХ (Cy-0n) {БГ-ЖЗ) (OP-Cy)ctgy + (ЖИ-Br)ctg. Результаты вычислений фиксируются блоком регистрации 19. Таким образом, в предложенном стенде определение схождения осуществляется при неподвижных платформах, что исключает вредное влияние сил трения, приближает условия качения управляемых колес на стенде к условиям качения управляемых колес при движении транспортного средства в реальных дорожных условиях, что повышает точность определения схождения. Формула. изобретения Стенд для определения схождения управляемых колес транспортного средства, содержащий основание, платформы для управляемых колес, связанные с основанием, датчики перемещения, установленные на основании, схему обработки сигналов датчиков и блок регистрации результатов обработки, отличающийся тем, что, с целью повышения точности определения схождения, платфорУМЫ неподвижно установлены на основании, а датчики перемещения выполнены в виде расположенных на одном уровне осветителей и фотоэлементов, при этом по одну сторону каждой платформы последовательно размещено, по крайней мере, два осветителя, а по другую сторону, по крайней мере, три фотоэлемента, причем первый осветитель и один из фотоэлементов размещены в передней части платформы на линии, перпендикулярной направлению движения транспортного средства, а второй осветитель и два других фотоэлемента - на линиях, неперпендикулярйых направлению движения транспортного средства, кроме того, на одной из платформ перед первыми осветителем и фотоэлементом размещены дополнительные осветитель и фотоэлемент, установленные на линии, параллельной линии расположения первых осветителя и фотоэлемента, а в схему обработки сигналов датчиков включены преобразователь сигналов фотоэлементов в импульсы, длительность которых пропорциональна времени между сигналами последов.ательно расположенных фотоэлементов, преобразователь длительности импульсов в пропорциональное ей число импульсов, подключенный к выходу преобразователя сигналов фотоэлементов в импульсы, и вычислительное устройство, вход которого подключен к выходу преобразователя длительности импульсов, а выход - на вход блока регистрации результатов обработки. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 18641, кл. 77 А 1, 25.05.71 (прототип).