Область техники.
Изобретение относится к морской поисково-спасательной технике, в частности к оптико-электронным средствам поиска и спасения людей, терпящих или потерпевших бедствие на море.
По данным Главного морского спасательно-координационного центра ФГБУ «Морская спасательная служба» Росморречфлота, количество аварийных случаев на море имеет устойчивую тенденцию к увеличению [1]. Все это сопровождается увеличением гибели людей, что свидетельствует о неудовлетворительном положении дел с индивидуальными и коллективными средствами спасения людей, а также со средствами поиска и спасения людей.
Уровень техники.
Известно, что в качестве индивидуальных средств спасения (ИСС) на судах используются спасательные круги, жилеты, гидротермокостюмы (ГТК), а в качестве коллективных средств спасения (КСС) применяются, как правило, спасательные плоты, спасательные и дежурные шлюпки различных типов. Существующие зарубежные и отечественные модели ГТК согласно Кодексу ЛСА гарантируют выживание человека в ГТК, изготовленном из материала, обладающего теплоизоляционными свойствами так, чтобы внутренняя температура тела человека не падала более чем на 2°С после пребывания его в течение 6 часов в циркулирующей воде с температурой от 0 до 2°С при отсутствии волнения. Требования к температуре окружающего воздуха при этом не устанавливаются. При наличии волнения и отрицательной температуре воздуха время выживания человека сокращается в 2-3 раза. Время же возможного пребывания человека в холодной воде только в спасательном жилете исчисляется минутами. Очевидно, что чем меньше время поиска людей, терпящих бедствие на море в ИСС и КСС, тем выше вероятность их спасания. Именно поэтому для увеличения вероятности обнаружения людей, терпящих бедствие на море, спасательные средства оборудованы устройствами указания их местоположения для целей поиска и спасания. Состав устройств указания местоположения ИСС и КСС для целей поиска и спасания определен Правилами Российского морского регистра судоходства (Правила), которые гармонизированы с требованиями Международного кодекса по спасательным средствам (Кодекс ЛСА) и Международной конвенции по охране человеческой жизни на море 1974 года с поправками (СОЛАС-74). Согласно Правилам, на КСС должны быть радиолокационный ответчик, передатчик автоматической идентификационной системы для целей поиска и спасания (передатчик АИС), радиолокационный отражатель, YKB-аппаратура двусторонней радиотелефонной связи, аварийный радиобуй, пиротехнические сигнальные средства, светильники, фонари, прожекторы и др. На ИСС должны быть звуковые сигнальные средства (свисток), поисковые электро-огни и световозвращающие ленты. На защитных костюмах (предназначенных для использования членами экипажа судна, расписанными на дежурные шлюпки или морские эвакуационные системы), кроме того, предусмотрен карман для переносной УКВ-радиотелефонной станции [2]. В качестве поисковых средств используются глаза человека, глаза человека, вооруженные биноклем, тепловизор, радиолокатор. Известные устройства имеют следующие недостатки: большое время обнаружения потерпевших, невозможность автоматического определения точных географических координат потерпевших, невозможность автоматического распознавания "свой-чужой", работа в основном в светлое время суток и при хорошей погоде (отсутствие тумана, дождя и снега). Под определением "свой" понимается потерпевший, которого ищут. Под определение "чужой" понимается любой другой объект, который не является целью поиска.
Очень часто для поиска людей, терпящих бедствие на море, используется авиационная техника (вертолеты и самолеты). В качестве поисковых средств также используются глаза человека, глаза человека, вооруженные биноклем, тепловизор, радиолокатор. Известные решения имеют те же недостатки, что и при обычном поиске: большое время обнаружения потерпевших, невозможность автоматического определения точных географических координат потерпевших, невозможность автоматического распознавания "свой-чужой", работа в основном в светлое время суток и при хорошей погоде (отсутствие тумана, дождя и снега).
АО ЦНИИ «Курс» и другие предприятия АО «Концерн «Моринформ-система-Агат» выполнили инновационную работу по созданию роботизированной судовой системы спасания людей. Система должна обнаруживать терпящего бедствие человека на акватории при помощи маяка или оптическими средствами [3]. В состав системы входит беспилотный летательный аппарат (БЛА), оснащенный системой GPS/ГЛОНАСС, инфракрасной и видеокамерами для оперативного поиска человека за бортом, ретрансляции данных о найденных людях, терпящих бедствие. Беспилотник с установленной системой наблюдения может работать в любое время суток (днем и ночью) а также при плохой погоде (наличие тумана, дождя и снега). Вместе с тем сохранились все указанные выше недостатки: большое время обнаружения потерпевших, невозможность автоматического определения точных географических координат потерпевших, невозможность автоматического распознавания "свой-чужой".
Наиболее близким к заявленному техническому решению является беспилотный авиационный комплекс для определения координат коронных разрядов (RU 2612937 С1, 10.11.2015) (прототип) содержащий беспилотный летательный аппарат и мобильную станцию управления и контроля, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связанны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемо-передатчиком, акселерометром, компасом, высотомером (альтиметром), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение беспилотного летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты беспилотного летательного аппарата по сигналам управления с мобильной станции управления и контроля, а также обеспечения контроля и управления беспилотным летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку. Область применения устройства не ограничивается электроэнергетикой. Устройство может быть использовано в любой области, где требуется определять точные географические координаты мест ультрафиолетового излучения. Известное устройство может в реальном времени автоматически зафиксировать момент появления ультрафиолетового излучения, может автоматически определить точные географические координаты мест ультрафиолетового излучения, может автоматически снять сигнатуру ультрафиолетового излучения [4]. Недостатком известного устройства является отсутствие возможности автоматически определить местонахождение людей, терпящих бедствие на море.
Раскрытие сущности изобретения
Задачей настоящего изобретения является создание беспилотного авиационного ультрафиолетового солнечно-слепого устройства для автоматического поиска людей, терпящих бедствие на море имеющего возможность автоматически в реальном времени зафиксировать нахождение потерпевшего в месте поиска, автоматически определить точные географические координаты потерпевшего, автоматически распознать объект как "свой-чужой", возможность работать в любое время суток (днем и ночью) и при плохой погоде (наличие тумана, дождя и снега).
Указанная задача настоящего изобретения решается тем, что в беспилотном летающем устройстве для определения координат коронных разрядов, содержащем беспилотный летательный аппарат и мобильную станцию управления и контроля, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемо-передатчиком, акселерометром, компасом, высотомером (альтиметром), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с мобильной станции управления и контроля, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, мобильная станция управления и контроля включает в себя компьютер, пульт управления, антенну приемника GPS/ГЛОНАСС, приемник GPS/ГЛОНАСС, антенну приемо-передатчика, приемо-передатчик, аккумулятор - на индивидуальных и коллективных средствах спасения установлены импульсные источники ультрафиолетового излучения.
В качестве дополнительного развивающего признака следует указать на возможность выполнения компьютера беспилотника с интерфейсом Wi-Fi (стандарт IEEE 802.11).
Ультрафиолетовый солнечно-слепой пеленгатор должен быть обязательно выполнен на основе многоанодных фотоумножителей (RU 2520726 С1, 24.12.2012) так как сейчас только такой тип ультрафиолетового солнечно-слепого пеленгатора может регистрировать сигнатуру ультрафиолетового излучения объектов.
Импульсные источники ультрафиолетового излучения могут быть выполнены на основе ультрафиолетовых светодиодов, на основе ультрафиолетовых эксимерных ламп (RU 2574584 С1 31.10.2014) и на основе ультрафиолетовых автоэмиссионных ламп [5].
Краткое описание чертежей
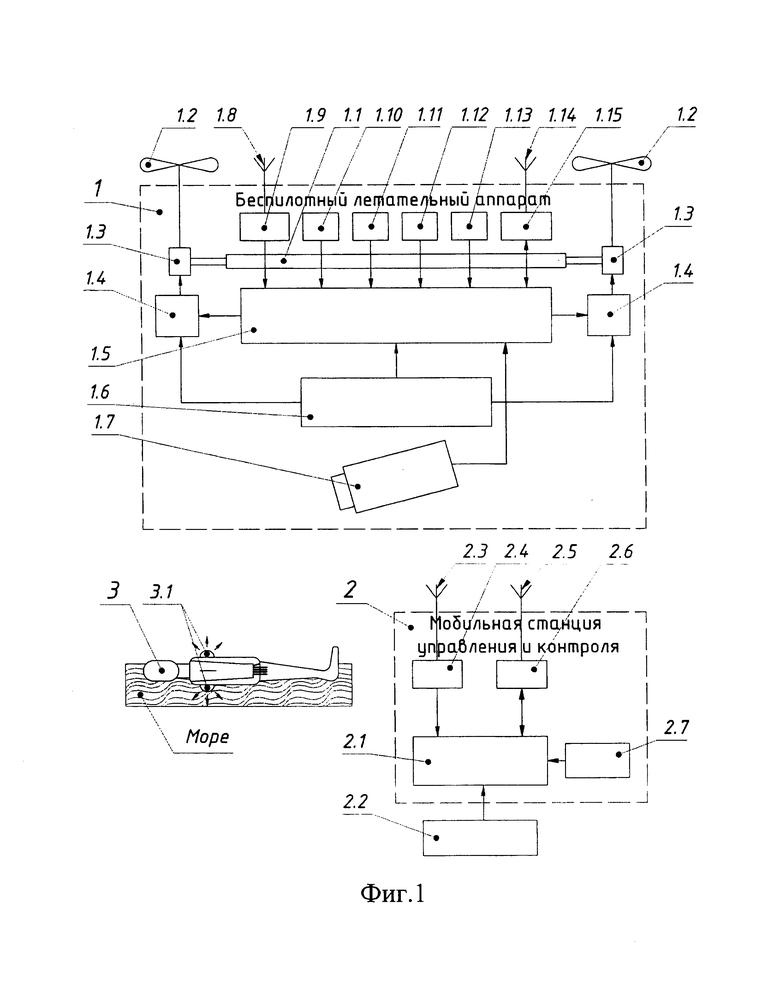
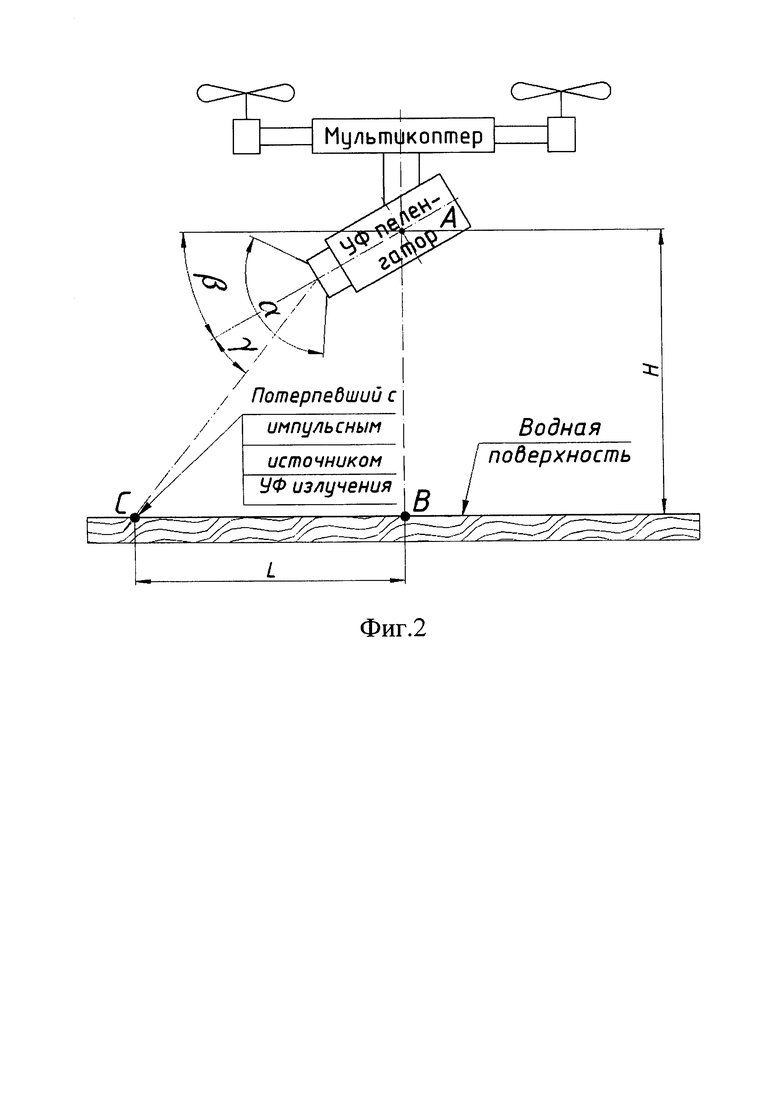
На фиг. 1 представлена структурная схема беспилотного авиационного ультрафиолетового солнечно-слепого устройства для автоматического поиска людей, терпящих или потерпевших бедствие на море, на фиг. 2 представлена схема, поясняющая принцип автоматического определения географических координат людей, терпящих бедствие на море спасательные средства которых оснащены импульсными источниками ультрафиолетового излучения.
Осуществление изобретения
Устройство содержит:
1 - беспилотный летательный аппарат (БЛА, беспилотник):
1.1 - несущий каркас;
1.2 - пропеллеры;
1.3 - электродвигатели;
1.4 - регуляторы вращения электродвигателей;
1.5 - компьютер с интерфейсом Wi-Fi;
1.6 - аккумулятор;
1.7 - ультрафиолетовый солнечно-слепой пеленгатор;
1.8 - антенна приемника GPS/ГЛОНАСС;
1.9 - приемник GPS/ГЛОНАСС;
1.10 - акселерометр;
1.11 - компас;
1.12 - высотомер (альтиметр);
1.13 - гироскоп;
1.14 - антенна приемо-передатчика;
1.15 - приемо-передатчик.
2 - мобильная станция управления и контроля:
2.1 - компьютер;
2.2 - пульт управления;
2.3 - антенна приемника GPS/ГЛОНАСС;
2.4 - приемник GPS/ГЛОНАСС;
2.5 - антенна приемо-передатчика;
2.6 - приемо-передатчик;
2.7 - аккумулятор.
3 - потерпевший со средствами спасения:
3.1 - импульсный источник ультрафиолетового излучения, установленный на средствах спасения.
Обозначения, указанные на фиг. 2 означают следующее:
α - угол поля зрения ультрафиолетового солнечно-слепого пеленгатора; β - угол наклона оптической оси ультрафиолетового солнечно-слепого пеленгатора относительно водной поверхности; γ - угол между оптической осью ультрафиолетового солнечно-слепого пеленгатора и направлением на импульсный источник ультрафиолетового излучения; Н - высота ультрафиолетового солнечно-слепого пеленгатора над водной поверхностью; L - расстояние от проекции центра координат ультрафиолетового солнечно-слепого пеленгатора (точка В) до точки С (местонахождение потерпевшего со средствами спасения и импульсным источником ультрафиолетового излучения, установленным на средствах спасения).
Устройство работает следующим образом. Устройство может работать в автоматическом режиме полета и в ручном режиме полета.
Работа в автоматическом режиме полета. Оператор на мобильной станции управления и контроля 2 с помощью компьютера 2.1 задает беспилотнику маршрут полета и высоту полета по маршруту. Оператор с помощью мобильной станции управления и контроля 2 дает команду беспилотнику 1 на начало полета. Компьютер 1.5 беспилотника 1 с помощью приемника GPS/ГЛОНАСС 1.9 определяет текущие географические координаты беспилотника 1, сравнивает их с первыми заданными географическими координатами и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, направляет беспилотник 1 в первую точку географических координат заданного маршрута. Компьютер 1.5 беспилотника 1 с помощью высотомера 1.12 измеряет текущую высоту полета беспилотника 1, сравнивает ее с первой заданной высотой полета и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, поднимает беспилотник на первую заданную высоту. После этого устройство начинает облет заданного маршрута. При запуске устройства начинает работать и ультрафиолетовый солнечно-слепой пеленгатор 1.7. При поле с по маршруту ультрафиолетовый солнечно-слепой пеленгатор 1.7 сразу же готов автоматически зафиксировать ультрафиолетовое излучение от любых имеющихся источников ультрафиолетового излучения. Ультрафиолетовый солнечно-слепой пеленгатор 1.7 автоматически определяет угловые координаты источников ультрафиолетового излучения относительно своей оптической оси. Зная фокусное расстояние объектива ультрафиолетового солнечно-слепого пеленгатора 1.7, пеленгатор 1.7 определяет угол γ (фиг. 2) между свей оптической осью и направлением на источник ультрафиолетового излучения. Компьютер 1.5 зная с помощью высотомера 1.12 высоту полета устройства Н, зная с помощью приемника GPS/ГЛОНАСС 1.9 текущие географические координаты устройства, зная с помощью компаса 1.11 направление полета устройства, определяет расстояние L и географические координаты точки С (фиг. 2). Указанная последовательность действий может повторяется для всех остальных имеющихся источников ультрафиолетового излучения, таким образом автоматически определяются координаты всех остальных имеющихся источников ультрафиолетового излучения. Географические координаты каждого источника ультрафиолетового излучения записываются в запоминающее устройство компьютера 1.5. Кроме того, двигаясь по маршруту ультрафиолетовый солнечно-слепой пеленгатор 1.7 на основе многоанодного фотоумножителя автоматически регистрирует амплитудно-временную характеристику (сигнатуру) источника ультрафиолетового излучения. Если сигнатура имеет осмысленных характер, то объект распознается как "свой". Если сигнатура имеет случайный характер, то объект распознается как "чужой", т.е. объект является либо природным, либо техногенным источником ультрафиолетового излучения и не является объектом поиска. Кроме того, ультрафиолетовый солнечно-слепой пеленгатор 1.7 по сигнатуре каждого объекта автоматически определяет принадлежность объекта к тому или иному судну. Компьютер 1.5 беспилотника 1 подсчитывает количество найденных потерпевших. Компьютер 1.5 беспилотника 1 с помощью приемо-передатчика 1.17 передает в реальном времени всю полученную информацию (количество найденных потерпевших, географические координаты каждого потерпевшего) на мобильную станцию управления и контроля 2. Компьютер 2.1 мобильной станции управления и контроля 2 подает сигнал тревоги, отображает на своем мониторе карту района бедствия, на карте района бедствия компьютер 2.1 специальными значками отображает свое расположение и расположение беспилотника 1. Компьютер 2.1 мобильной станции управления и контроля отображает также специальными значками на карте района бедствия местонахождение каждого обнаруженного потерпевшего. Дальнейшие действия спасателей определяются требованиями Международного Кодекса по спасательным средствам (Кодекс ЛСА) [8] или инструкциями Федерального агентство морского и речного транспорта (Росморречфлот). Несущий каркас 1.1 служит для размещения всех устройств беспилотника. Пропеллеры 1.2 служит в полете для поддержания беспилотника на заданной высоте. Аккумулятор 1.6 обеспечивает питания всех устройств беспилотника. Через антенну приемника GPS/ГЛОНАСС 1.8 приемника GPS/ГЛОНАСС 1.9 компьютер 1.5 получает навигационную информацию. Акселерометр 1.10 и гироскоп 1.13 служат для поддержания беспилотника в горизонтальном положении. Через антенну приемо-передатчика 1.14 и приемо-передатчик 1.15 идет обмен информацией между беспилотником 1 и мобильной станцией управления и контроля 2. Через антенну приемника GPS/ГЛОНАСС 2.3 приемник GPS/ГЛОНАСС 2.4 компьютер 2.1 получает навигационную информацию. Через антенну приемо-передатчика 2.5 приемо-передатчика 2.6 идет обмен информацией между мобильной станцией управления и контроля 2 и беспилотником 1. Аккумулятор 2.7 служит для питания всех устройств мобильной станции управления и контроля 2.
Компьютер беспилотника с интерфейсом Wi-Fi 1.5 передает также всю полученную информацию через Wi-Fi. Любой спасатель имеющий планшет с интерфейсом Wi-Fi и установленным на нем специальной программой для работы с предлагаемым устройством может получить эту информацию. При этом спасатель может получить не всю информацию, а только информацию, касающуюся своей зоны ответственности. Дальнейшие действия спасателя определяются инструкциями Федерального агентства морского и речного транспорта (Росморречфлот).
Работа в ручном режиме полета. Оператор с помощью пульта управления 2.2 мобильной станции управления и контроля 2 запускает беспилотник 1 и начинает движение по маршруту. Ультрафиолетовый солнечно-слепой пеленгатор 1.7 включен и наблюдает за окружающим пространством. Дальнейшие действия происходят аналогично работе в автоматическом режиме полета.
Ультрафиолетовый солнечно-слепой пеленгатор на основе многоанодного фотоумножителя может быть оснащен сверхширокоугольной оптикой (RU 2542641 С1, 30.09.2013).
В качестве приемо-передатчиков 1.15 и 2.6 может быть использовано устройство Wi-Fi.
В качестве беспилотника может быть использован беспилотник любого типа: самолетный, вертолетный, мультикоптерный, конвертопланный и т.д. В настоящее время в России занимаются беспилотниками более 100 фирм [6,7] на любой вкус и кошелек. Для обеспечения эффективности применения при поиске людей, терпящих бедствие на море беспилотник должен обладать следующими характеристиками:
Грузоподъемность - 2…5 кг (масса ультрафиолетового солнечно-слепого пеленгатора).
Крейсерская скорость полета - 100 км/час, чем больше скорость, тем меньше время обнаружения потерпевших.
Длительность полета на одной заправке - не менее 2…3 часов.
Остальные параметры беспилотников не носят принципиального характера, так как сейчас практически все беспилотники имеют все необходимые технические устройства для использования беспилотников при поиске людей терпящих или потерпевших бедствие на море.
Источники информации:
1. Илюхин, В.Н. О совершенствовании требований к судовым спасательным средствам / В.Н. Илюхин, Ф.Д. Виноградов, Н.А. Вальдман, В.И. Таровик // Морской вестник. - 2021. - №4(80). - С. 104-109.
2. Никитин, B.C. Инновационные направления развития поисково-спасательной техники / В.С. Никитин, В.Н. Илюхин // Судостроение. - 2021. - №6. - С. 48-55.
3. Чуй, С.А. Роботизированная судовая система спасания людей по тревоге «человек за бортом» / С.А. Чуй, Д.А. Вавилов // Проблемы развития корабельного вооружения и судового радиоэлектронного оборудования. - 2018. - №1(14). - С. 27-30.
4. Родионов, А.И. Сигнатурные методы исследования некоторых физико-химических процессов: дис. … канд. физико-математ. наук: 01.04.17: защищена 19.11.08: / Родионов Алексей Игоревич. - М., 2008. - 158 с.
5. Мье, М.М. Катодолюминесцентные источники в диапазоне ультрафиолетового излучения с автоэмиссионным катодом на основе углеродных материалов / М.М. Мье, Е.П. Шешин, З.Я. Лвин, Л.Н. Вин, Ч.М. Аунг, И.М. Хтуе // Труды МФТИ. - 2019. - Том 11. - №4. - С. 37-46.
6. Российские беспилотники: [сайт]. - Москва, 2022 - URL: https://russiandrone.ru (дата обращения: 14.03.2022). - Текст электронный.
7. База данных № RU 2021620554 Российская Федерация. База данных беспилотных воздушных судов: №2021620417: дата регистрации: 15.03.2021, дата публикации: 24.03.2021 / Данилов Н.И., Каниовский А.Е. - 5 ГБ.
8. Международный Кодекс по спасательным средствам (Кодекс ЛСА). [Электронный ресурс]: URL: http://docs.cntd.ru/document/499032094/ (Дата обращения 29.03.2022).
Изобретение относится к морской поисково-спасательной технике, в частности к оптико-электронным средствам поиска и спасения людей, терпящих или потерпевших бедствие на море. Беспилотное авиационное ультрафиолетовое солнечно-слепое устройство для автоматического поиска людей, терпящих или потерпевших бедствие на море, содержит беспилотный летательный аппарат и мобильную станцию управления и контроля. Беспилотное устройство выполнено с возможностью приема сигнала от установленных на индивидуальных и коллективных средствах спасения людей импульсных источников ультрафиолетового излучения, по сигнатуре излучения которых распознается ультрафиолетовый объект как «свой-чужой», если сигнатура имеет случайный характер, то объект распознается как «чужой», т.е. объект является либо природным, либо техногенным источником ультрафиолетового излучения и не является объектом поиска. Технический результат - малое время обнаружения потерпевших, автоматическое определение точных географических координат потерпевших, автоматическое распознавание «свой-чужой», работа в любое время суток и при плохой погоде. 1 з.п. ф-лы, 2 ил.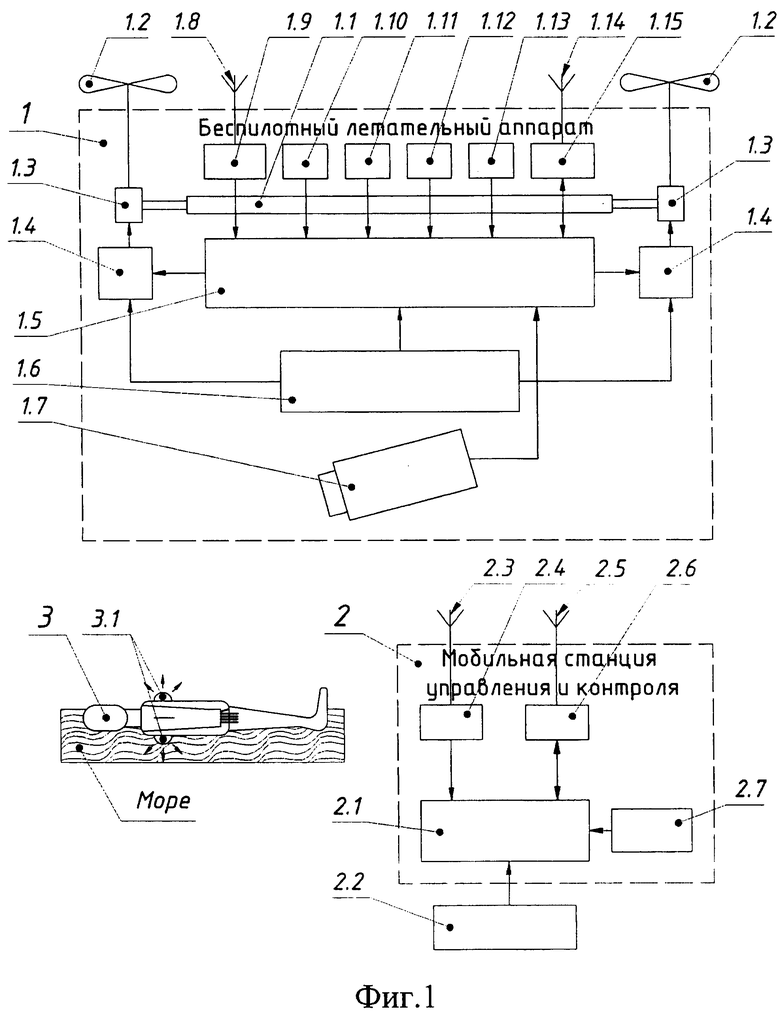
1. Беспилотное авиационное ультрафиолетовое солнечно-слепое устройство для автоматического поиска людей, терпящих или потерпевших бедствие на море, содержащее беспилотный летательный аппарат и мобильную станцию управления и контроля, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемопередатчиком, акселерометром, компасом, высотомером, гироскопом, компьютером, выполненным с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с мобильной станции управления и контроля, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, мобильная станция управления и контроля включает в себя компьютер, пульт управления, антенну приемника GPS/ГЛОНАСС, приемник GPS/ГЛОНАСС, антенну приемопередатчика, приемопередатчик, аккумулятор, отличающееся тем, что беспилотное устройство выполнено с возможностью приема сигнала от установленных на индивидуальных и коллективных средствах спасения людей импульсных источников ультрафиолетового излучения, по сигнатуре излучения которых распознается ультрафиолетовый объект как «свой-чужой», если сигнатура имеет случайный характер, то объект распознается как «чужой», т.е. объект является либо природным, либо техногенным источником ультрафиолетового излучения и не является объектом поиска.
2. Устройство по п. 1, отличающееся тем, что компьютер беспилотного летательного аппарата выполнен с интерфейсом Wi-Fi.
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОРОННЫХ РАЗРЯДОВ | 2015 |
|
RU2612937C1 |
| US 20210269149 A1, 02.09.2021 | |||
| WO 2011028463 A1, 10.03.2011 | |||
| US 20200023926 А1, 23.01.2020. | |||

