Изобретение относится к средствам повышения безопасности водолаза при выполнении подводно-технических работ различного назначения.
Водолазные работы обычно обеспечиваются судном, которое называют судно-обеспечитель (в дальнейшем - судно). На судне располагаются средства обеспечения водолазных работ, в том числе технические средства, связанные с безопасностью погружения, контролем и управлением деятельности водолазов. Одной из таких систем является система определения местоположения водолаза.
Известны способы и устройства, позволяющие решать навигационные задачи в полном объеме или частично.
В свидетельстве РФ на полезную модель [1] водолаз имеет двухканальную корреляционную систему, с помощью которой определяет направление на источник акустического сигнала. В этой системе отсутствует возможность определения дистанции до источника сигнала и своего местоположения в географической системе координат.
В патенте США [2] предлагается навигационная база, состоящая из донных маяков-ответчиков с гидроакустическими приемопередатчиками и дрейфующего маяка-ответчика, который дополнительно оснащен системой спутниковой навигации. Дрейфующий маяк в системе реального времени по гидроакустическому каналу взаимодействует с донными маяками-ответчиками с целью определения их координат и передачи их водолазу. Далее водолаз своими средствами решает триангуляционную задачу, определяя собственные координаты. К недостаткам этой системы можно отнести наличие донных маяков, а также отсутствие в заявленном устройстве способа и аппаратуры для передачи координат водолаза на судно, т.е. не обеспечивается контроль местоположения водолаза внешними (по отношению к водолазу) системами.
Водолазная система подводной навигации, заявленная в патенте РФ [3], содержит кроме судна, имеющего полный набор технических средств, маяк-ответчик с гидроакустическим приемопередатчиком и средствами спутниковой навигации, а также блок водолаза, в котором для навигации используются гидроакустический приемопередатчик, эхолот, датчики курса, крена/дифферента, спутниковая навигация. Координаты водолаза определяются при использовании данных от эхолота водолаза и данных спутниковой навигации, передаваемых с маяков и с судна по гидроакустическому каналу. Положение водолаза отображается на дисплее водолаза и на мониторе судна. Устройство позволяет решать навигационные задачи, но перегружено многочисленными разнотипными техническими средствами у водолаза, что требует соответствующего энергопотребления, размещения аппаратуры в снаряжении водолаза, а также решения задачи гидроакустической совместимости разнородных средств. Кроме того, при работе в акватории с сильно расчлененным дном или при выполнении подводно-технических работ, когда на дне имеются отражающие объекты, эхолот, который дает основную информацию для решения координатной задачи, может регистрировать не глубину места, а расстояние до отражающего объекта.
Известна система навигации для водолазов по патенту [4]. Система состоит из аппаратуры дрейфующих маяков, судна и аппаратуры водолаза. Маяки и судно оборудованы средствами спутниковой навигации в реальном времени, а также гидроакустическими приемопередатчиками. В аппаратуре водолаза имеется гидроакустический приемник с дисплеем, на котором может отображаться принимаемая по гидроакустическому каналу информация. Система [4] работает следующим образом. Водолаз принимает сигналы от дрейфующих маяков и судна, причем каждый из этих сигналов содержит идентификационный код источника сигнала и информацию о его географических координатах. В компьютерном устройстве, входящем в аппаратуру водолаза, на основе полученной информации решается задача определения собственного местоположения. Рассчитанные координаты отображаются на дисплее водолаза.
Отметим, что во всех известных устройствах, кроме устройства по патенту РФ №110503, навигационная задача решается водолазом, но на судне в рамках заявленных технических решений отсутствует возможность определения местоположения водолаза.
Наиболее близким к предлагаемому техническому решению по техническим и функциональным характеристикам является «Гидроакустическая система подводной навигации для водолазов», предложенная в патенте [4]. Это устройство принято за прототип. Способ навигации, который реализуется в устройстве-прототипе, следует из анализа структуры и связей устройства [4], а также из описания его работы.
К недостаткам устройства-прототипа следует отнести:
- отсутствие у водолаза гидроакустического передатчика, что не позволяет водолазу передать на судно результаты решения им координатной задачи и, как следствие, отсутствие (по заявленному устройству) на судне возможности формирования координатной трассы перемещения обеспечиваемого водолаза;
- отсутствие возможности организации двусторонней связи, передача информации может осуществляться только по линии «судно-водолаз»;
- отсутствие системы оперативного измерения скорости звука, которая может меняться в зависимости от изменения гидрометеорологических условий или глубины, на которой выполняются водолазные работы, что влияет на точность результатов решения координатной задачи;
- решение координатной задачи средствами, имеющимися в снаряжении водолаза, требует введения в состав этих средств дополнительных вычислительных ресурсов и соответствующего энергообеспечения;
- вся информация от маяков, необходимая для решения водолазом координатной задачи, передается только по гидроакустическому каналу, что требует принятия мер по обеспечению необходимой достоверности принимаемых данных в условиях искажающего воздействия гидроакустического канала и, соответственно, дополнительного энергопотребления.
Основной задачей заявляемого технического решения является определение на судне, которое обеспечивает водолазные работы, местоположения контролируемого водолаза и фиксации трассы его движения.
Техническими результатами предлагаемой системы и способа определения местоположения водолаза являются:
- передача решения координатной задачи с воспроизведением координат и трассы движения контролируемого водолаза на судно;
- оперативный контроль и корректировка величины скорости звука в акватории;
- упрощение аппаратуры водолаза и маяков, а также уменьшение энергопотребления этой аппаратуры.
Для достижения заявляемых технических результатов
в систему определения местоположения водолаза,
- содержащую аппаратуру судна, аппаратуру первого и второго маяков, дрейфующих в акватории, где выполняются водолазные работы,
- при этом аппаратура судна и аппаратура каждого маяка содержит собственный гидроакустический приемопередающий тракт, имеющий акустическую антенну, устройство формирования/обработки информации, собственный приемник спутниковой навигации, выполненный с возможностью определения собственных координат в реальном времени;
- аппаратура судна содержит дисплей с пультом управления, соединенный с собственным устройством формирования/обработки информации,
- аппаратура водолаза содержит акустическую антенну и гидроакустический тракт,
введены новые признаки:
- аппаратура судна и аппаратура каждого маяка дополнительно содержат приемно-излучающие тракты радиосвязи, соединенные каждый с соответствующим устройством формирования/обработки информации,
- гидроакустический тракт и акустическая антенна аппаратуры водолаза выполнены с возможностью приема и передачи информации;
- акустические антенны судна, акустические антенны маяков и акустическая антенна водолаза выполнены ненаправленными.
В способ определения местоположения водолаза, включающий
- определение судном и маяками, дрейфующими в акватории, где выполняются водолазные работы, с помощью системы спутниковой навигации собственных координат в реальном времени, а также дистанции между судном и каждым маяком,
- передачу и прием сигналов по гидроакустическому каналу аппаратурой судна и аппаратурой каждого из маяков,
- прием сигналов по гидроакустическому каналу аппаратурой водолаза,
- определение координат водолаза и отображение координат водолаза на дисплее,
введены новые признаки:
- аппаратурой маяков передают по радиоканалу свои идентификационные номера и текущие координаты;
- при этом аппаратурой судна определяют текущие дистанции между судном и каждым маяком dc-м1 и dc-м2;
- в момент времени tис аппаратурой судна ненаправленно излучают по гидроакустическому каналу запросный сигнал, содержащий адресную команду с идентификационном номером водолаза, местоположение которого требуется определить;
- аппаратурой гидроакустических трактов маяков и водолаза принимают запросный сигнал, излученный аппаратурой судна в момент tис, и автоматически ненаправленно излучают ответные гидроакустические сигналы, содержащие информацию соответственно об идентификационных номерах маяков и водолаза;
- аппаратурой судна принимают в моменты времени tпс-м1 и tпс-м2 по гидроакустическому каналу ответные сигналы, излученные маяками, и определяют текущую скорость звука сзв, используя определенные ранее значения текущих дистанций между судном и каждым из маяков dc-м1 и dc-м2 и разность между временем tис и временем приема ответных сигналов от соответствующего маяка;
- аппаратурой гидроакустических трактов судна и маяков принимают в моменты времени соответственно tпс-в, tпм1-в и tпм2-в ответный сигнал, автоматически излученный ненаправленно аппаратурой водолаза;
- аппаратурой судна определяют дистанцию от судна до водолаза dc-в, используя определенное ранее значение текущей скорости звука сзв и разность между временем tис и временем приема ответного сигнала от водолаза tпс-в;
- аппаратурой маяков в автоматическом режиме передают по радиоканалу на судно зафиксированные значения tпм1-в и tпм2-в вместе со своими идентификационными номерами;
- аппаратурой судна определяют дистанции dм1-в и dм2-в от каждого из маяков до водолаза, используя определенные ранее значения текущих дистанций между судном и каждым из маяков dc-м1 и dc-м2, определенное ранее значение текущей скорости звука сзв и разность между временем tис и полученными по радиоканалу от маяков значения времени приема маяками ответного сигнала от водолаза tпм1-в и tпм2-в;
- аппаратурой судна определяют координаты водолаза по определенным дистанциям между водолазом и судном, водолазом и каждым из маяков, наносят координаты водолаза на дисплей с указанием текущего времени и соединяют линиями с ранее нанесенными координатами, получая траекторию движения водолаза.
Дополнительно момент времени излучения с судна адресного сигнала по гидроакустическому каналу tиc выбирают в ручном режиме или устанавливают в автоматическом режиме.
В соответствии с предлагаемой системой и способом
- осуществляется определение местоположения контролируемого водолаза в заданной системе координат с одновременной визуализацией трассы передвижения водолаза;
- оперативно корректируется текущая скорость звука в акватории, что увеличивает точность решения координатной задачи;
- осуществляется передача информационных сигналов с маяков на судно по радиоканалу, что дает возможность вычислять скорость распространения звуковых волн, а также упростить систему передачи информации маяк-судно и уменьшить энергопотребление аппаратуры, осуществляющей обмен информацией между маяками и судном;
- упрощается гидроакустическая аппаратура водолаза, уменьшается ее номенклатура, объем и энергопотребление.
Введение новых признаков обеспечивает заявленные технические результаты, состоящие в оперативном контроле местоположения водолаза с обеспечивающего судна.
Сущность заявляемого технического решения поясняется фиг. 1, 2. На фиг. 1 показана структура системы, на фиг. 2 поясняется способ определения местоположения (координат) водолаза.
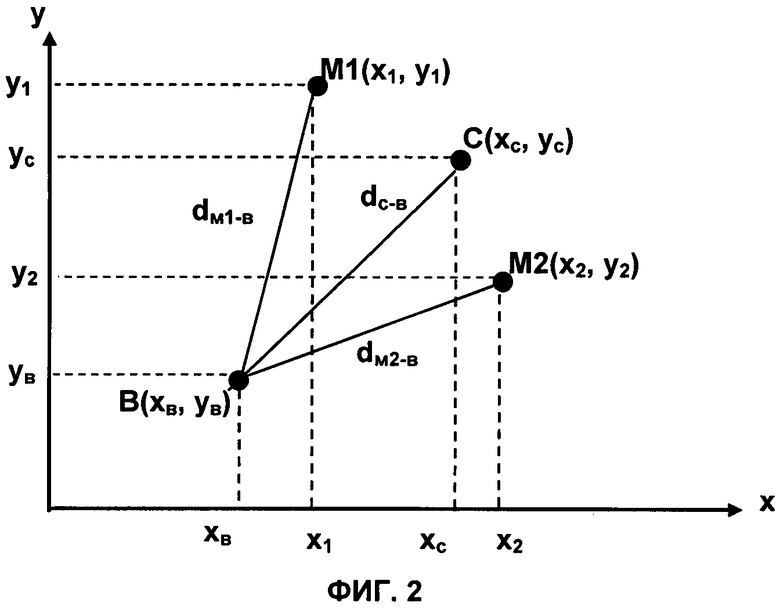
Заявляемая система (фиг. 1) содержит первый маяк 1 и второй маяк 2, судно 3, которые взаимодействуют с водолазом 4. На судне 3 имеется гидроакустический приемопередающий тракт 5 судна (ГППС) с ненаправленной акустической антенной 6 судна (АС). Первый и второй маяки также имеют первый и второй гидроакустические приемопередающие тракты 7 и 8 (ГПП1, ГПП2) с первой и второй ненаправленными акустическими антеннами 9, 10 (А1, А2) соответственно. Маяки 1, 2, судно 3, содержат также приемники спутниковой навигации 11, 12, 13 судна и маяков (СПНС, СПН1, СПН2), а также приемно-излучающие тракты радиосвязи 14, 15, 16 судна и маяков (РППС, РПП1, РПП2). AC, А1, А2 соединены с ГППС, ГПП1, ГПП2 соответственно. ГППС, СПНС, РППС соединены с устройством формирования/обработки 17 судна (УОС), которое также соединено с дисплеем 18 (Д), ГПП1, СПН1, РПП1 соединены с первым устройством формирования/обработки 19 первого маяка (УО1), а ГПП2, СПН2, РПП2 - со вторым устройством формирования/обработки 20 второго маяка (УО2). Гидроакустический тракт водолаза 4 выполнен как гидроакустический приемопередающий тракт 21 (ГППВ), причем ГППВ соединен с ненаправленной акустической антенной 22 водолаза (АВ).
Работу системы и способ определения местоположения водолаза целесообразно рассматривать совместно.
В исходном положении первый и второй маяки 1, 2, судно 3, на которых размещена соответствующая аппаратура, находятся в акватории выполнения водолазных работ, где спущен водолаз 4. Судно 3 занимает точку С с координатами (хс, ус), координаты первого и второго маяков M1(x1, y1) и М2(х2, у2) соответственно (см. фиг. 2). В исходном состоянии аппаратура, размещенная на маяках 1, 2 и у водолаза 4, находится в режиме приема.
С помощью приемников спутниковой навигации СПНС, СПН1, СПН2 на судне 3, маяках 1, 2 определяют свои координаты; с маяков 1, 2 по радиоканалу с помощью РПП1, РПП2 передают на судно 3 свои координаты (х1, y1), (х2, у2) вместе с идентификационными номерами. На судне вычисляют текущие расстояния между судном 1 и каждым из маяков 2 и 3, которые обозначены dc-м1 и dc-м2.
Далее с судна в момент времени tис излучают с помощью ГППС и АС по гидроакустическому каналу запросный сигнал, содержащий адрес (идентификационный номер) водолаза, за которым ведется наблюдение. Наличие в запросном сигнале адреса конкретного водолаза необходимо при одновременной работе в акватории нескольких водолазов. Запросный сигнал принимают антеннами А1, А2, АВ и обрабатывают с помощью ГПП1, ГПП2, ГППВ на маяках и у водолаза. После приема сигнала, излученного с судна в момент tис, маяки 1, 2 по гидроакустическому каналу излучают ответный адресный сигнал, содержащий идентификационный номер маяка. Эти сигналы маяков в моменты времени tпс-м1 и tпс-м2 принимают на судне с помощью АС, ГППС и в результате обработки в УОС определяют текущую скорость звука с, причем в память УОС заносят среднее значение скорости звука

Аппаратура водолаза, приняв излученный в момент tис сигнал с судна, в автоматическом режиме излучает ответный сигнал с помощью ГППВ и ненаправленной антенны АВ. Сигнал, излученный аппаратурой водолаза, принимают аппаратурой первого и второго маяков в моменты времени tпм1-в и tпм2-в соответственно, фиксируют время приема сигнала от водолаза и автоматически по радиоканалу передают на судно эти данные вместе с идентификационными номерами маяков.
Ответный сигнал от водолаза также принимают гидроакустической аппаратурой судна в момент времени tпс-в и с помощью УОС определяют дистанцию до водолаза dc-в=сзв(tпс-в-tис)/2. Кроме того, на судне, используя принятые по радиоканалу от маяков значения tпм1-в и tпм2-в, вычисляют дистанции dм1-в и dм2-в между каждым из маяков и водолазом по формулам dм1-в=сзв(tпм1-в-tис)-dc-в, dм2-в=сзв(tпм2-в-tис)-dc-в.
Таким образом, на судне известны три дистанции: между судном и водолазом dc-в, между первым маяком 1 и водолазом dм1-в и между вторым маяком 2 и водолазом dм2-в.
Координаты водолаза (хв, ув) (см. фиг. 2) определяют при решении системы квадратных уравнений:

Система (1) имеет при решении по два корня; добавлением уравнения

система (1) сводится к системе линейных уравнений:

откуда однозначно определяют искомые координаты водолаза (хв, ув).
После определения координат водолаза с помощью УОС координаты вводят вместе с временем вычислений в виде графических символов в координатную сетку акватории на дисплее Д и соединяют с ранее вычисленными координатами водолаза линиями, формируя на дисплее траекторию движения водолаза в заданной системе координат с указанием моментов времени для каждой зафиксированной точки.
Ряд процедур при работе системы осуществляется автоматически (например, излучение ответных сигналов аппаратурой водолаза и маяков), другие действия стимулируются сигналом, посылаемым с судна в момент времени tиc. В зависимости от гидрометеорологических и/или гидролого-акустических условий, а также программы передвижений водолаза, связанной с выполнением подводно-технических работ, контроль местоположения водолаза, связанный с вычислением его координат, может выполняться в ручном режиме или в автоматическом режиме. При автоматическом режиме в устройства УОС, УО1 и УО2 заранее вводят соответствующие данные для обмена информацией по радиоканалу с судном и излучения аппаратурой судна сигнала по гидроакустическому каналу.
Используемые в заявляемой системе устройства являются известными: маяки с системами спутниковой навигации типа GPS/ГЛОНАСС описаны в патентах [2-4]; приемно-излучающая гидроакустическая аппаратура для водолазов и судовая описана в [3]. Конструкция ненаправленной акустической антенны представлена в книге [5]. Устройства электропитания не включены в аппаратуру водолаза и маяков. Характеристики этих устройств зависят от длительности работы водолаза и маяков, а также от взаимных дистанций. При дистанциях до 500-1000 м и работе в течение нескольких часов аппаратура водолаза и маяков может быть запитана от миниатюрных батарей или аккумуляторов. Если в снаряжение водолаза входят помимо устройства для определения местоположения другие гидроакустические системы, в частности система телефонной связи [2, 3], заявляемая аппаратура определения местоположения водолаза, размещаемая на водолазе, может быть совмещена с гидроакустической аппаратурой других систем, в том числе и по электропитанию.
Заявленный технический эффект от использования системы и способа определения местоположения водолаза, обеспечиваемый при работе:
- решается главная задача, связанная с постоянным контролем местоположения водолаза, причем визуализация этого местоположения обеспечивает наглядность и удобство контроля;
- повышается точность определения координат водолаза за счет периодического измерения скорости звука в воде, которая может меняться из-за погодных условий, при изменении температуры воды, глубины погружения водолаза и по другим причинам.
- значительно упрощается аппаратура водолаза, т.к. эта аппаратура является простым ретранслятором, работающим в режиме в режиме «прием/излучение».
В предлагаемой системе и в способе определения местоположения водолаза основная аппаратная и функциональная нагрузка ложится на аппаратуру судна, обеспечивающего работу водолазов. Достаточно простая типовая аппаратура располагается на маяках, еще более простая аппаратура находится у водолаза. Поэтому предлагаемая система может быть использована не только для профессиональных водолазов, но и для обеспечения погружения дайверов-любителей, которые во многих случаях не имеют полнолицевой маски со средствами телефонной связи с судном обеспечения. При этом требования к безопасности и контролю дайвинга являются достаточно жесткими. Кроме того, предлагаемая система может быть использована:
- для автоматизированного контроля местоположения подводных аппаратов, работающих в зоне действия гидроакустических средств маяков;
- для контроля местоположения группы водолазов, при этом у каждого водолаза должен быть свой идентификационный номер, а в программно-аппаратном обеспечении маяков и судна должна осуществляться селекция для визуализации трасс перемещения каждого из контролируемых водолазов.
Источники информации
1. Свидетельство РФ на полезную модель №43370. Пеленгатор водолаза, опубл. 10.01.2005.
2. Патент США №7483337 (US 2008008045). System and method for extending GPS to divers and underwater vehicle, опубл. 10.01.2008.
3. Патент РФ на полезную модель №110503. Гидроакустическая система подводной навигации и подводный блок водолаза, опубл. 20.11.2011.
4. Патент РФ на полезную модель №97539. Гидроакустическая система подводной навигации для водолазов, опубл. 10.09.2010.
5. Свердлин В.М. Гидроакустические антенны и преобразователи. Л.: Судостроение, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И КОНТРОЛЯ ЕГО МЕСТОПОЛОЖЕНИЯ НА ПОВЕРХНОСТИ МОРЯ | 2000 |
|
RU2167430C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
Использование: изобретение относится к средствам, обеспечивающим безопасность при выполнении водолазных работ различного назначения. Сущность: система определения местоположения водолаза включает аппаратуру двух маяков и судна, дрейфующих в акватории выполнения водолазных работ. Аппаратура судна и маяков включает систему спутниковой навигации, гидроакустические приемопередатчики и приемопередатчики по радиоканалу. Аппаратура водолаза включает гидроакустический приемопередатчик. Маяки передают на судно свои координаты, и на судне определяют дистанции до каждого из маяков. Излучив с судна запросный сигнал по гидроакустическому каналу и получив ответный сигнал от маяков, используя данные о расстояниях судно-маяк, на судне определяют текущую скорость звука. Аппаратура водолаза в автоматическом режиме, приняв излученный с судна сигнал, ненаправленно излучает сигнал, который принимается аппаратурой маяков и судна, причем аппаратура маяков ретранслирует по гидроакустическому каналу принятый от водолаза сигнал вместе с временем приема этого сигнала. Используя значение текущей скорости звука, данные о времени излучения запросного сигнала и времени приема ответных сигналов от водолаза, на судне определяют дистанции между водолазом и маяками и между водолазом и судном. По этим дистанциям определяют координаты водолаза, наносят на дисплей, соединяя координаты водолаза в траекторию его движения. Изобретение может быть использовано не только для профессиональных водолазов, но и для обеспечения погружения дайверов-любителей, которые не имеют полнолицевой маски со средствами телефонной связи с судном обеспечения. Система и способ могут быть также использованы для контроля местоположения группы водолазов и для автоматизированного контроля местоположения подводных аппаратов, работающих в зоне действия гидроакустических средств маяков. Технический результат: обеспечение контроля местоположения водолаза с визуализацией этого местоположения, повышение точности определения координат водолаза и упрощение аппаратуры водолаза. 2 н. и 1 з.п. ф-лы, 2 ил.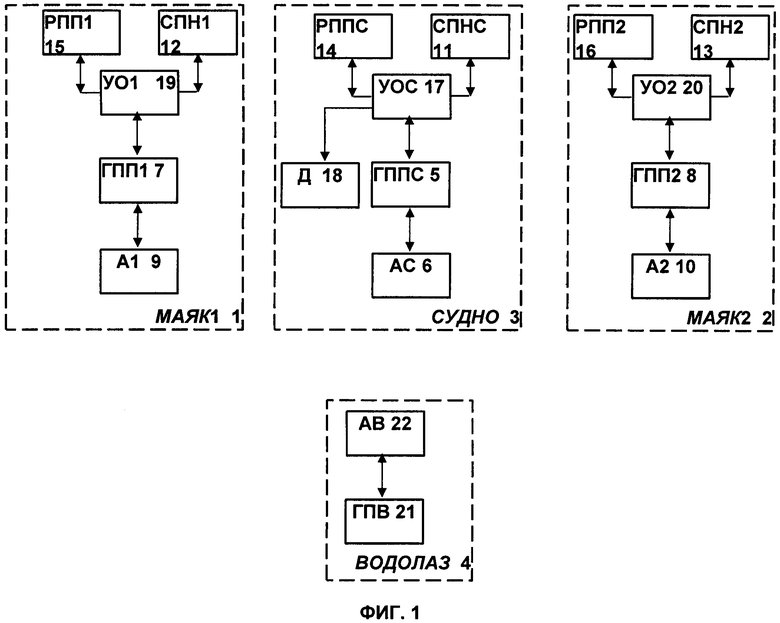
1. Система определения местоположения водолаза, содержащая аппаратуру судна, аппаратуру первого и второго маяков, дрейфующих в акватории, где выполняются водолазные работы, при этом аппаратура судна и аппаратура каждого маяка содержит собственный гидроакустический приемопередающий тракт, имеющий акустическую антенну, устройство формирования/обработки информации, собственный приемник спутниковой навигации, выполненный с возможностью определения собственных координат в реальном времени; причем аппаратура судна содержит дисплей с пультом управления, соединенный с собственным устройством формирования/обработки информации, а аппаратура водолаза содержит акустическую антенну и гидроакустический тракт, отличающаяся тем, что аппаратура судна и аппаратура каждого маяка дополнительно содержат приемно-излучающие тракты радиосвязи, соединенные каждый с соответствующим устройством формирования/обработки информации; гидроакустический тракт и акустическая антенна аппаратуры водолаза выполнены с возможностью приема и передачи информации; акустические антенны судна, акустические антенны маяков и акустическая антенна водолаза выполнены ненаправленными.
2. Способ определения местоположения водолаза, включающий определение судном и маяками, дрейфующими в акватории, где выполняются водолазные работы, с помощью системы спутниковой навигации собственных координат в реальном времени, а также дистанции между судном и каждым маяком, передачу и прием сигналов по гидроакустическому каналу аппаратурой судна и аппаратурой каждого из маяков, прием сигналов по гидроакустическому каналу аппаратурой водолаза, определение координат водолаза и отображение координат водолаза на дисплее, отличающийся тем, что аппаратурой маяков передают по радиоканалу свои идентификационные номера и текущие координаты, а аппаратурой судна определяют текущие дистанции между судном и каждым маяком dc-м1 и dc-м2; в момент времени tис аппаратурой судна ненаправленно излучают по гидроакустическому каналу запросный сигнал, содержащий адресную команду с идентификационном номером водолаза, местоположение которого требуется определить; аппаратурой гидроакустических трактов маяков и водолаза принимают запросный сигнал, излученный аппаратурой судна в момент tис, и автоматически ненаправленно излучают ответные гидроакустические сигналы, содержащие информацию соответственно об идентификационных номерах маяков и водолаза; аппаратурой судна принимают в моменты времени tпс-м1 и tпс-м2 гидроакустические ответные сигналы, излученные маяками, и определяют текущую скорость звука c, используя определенные ранее значения текущих дистанций между судном и каждым из маяков dc-м1 и dc-м2 и разность между временем tис и временем приема ответных сигналов от соответствующего маяка; аппаратурой гидроакустических трактов судна и маяков принимают в моменты времени соответственно tпс-в, tпм1-в и tпм2-в ответный сигнал, автоматически излученный ненаправленно аппаратурой водолаза; аппаратурой судна определяют дистанцию от судна до водолаза dc-в, используя определенное ранее значение текущей скорости звука с и разность между временем tис и временем приема ответного сигнала от водолаза tпс-в; аппаратурой маяков в автоматическом режиме передают по радиоканалу на судно зафиксированные значения tпм1-в и tпм2-в вместе со своими идентификационными номерами; аппаратурой судна определяют дистанции dм1-в и dм2-в от каждого из маяков до водолаза, используя определенные ранее значения текущих дистанций между судном и каждым из маяков dc-м1 и dc-м2, определенное ранее значение текущей скорости звука с и разность между временем tис и полученными по радиоканалу от маяков значения времени приема маяками ответного сигнала от водолаза tпм1-в и tпм2-в; аппаратурой судна определяют координаты водолаза по определенным дистанциям между водолазом и судном, водолазом и каждым из маяков, наносят координаты водолаза на дисплей с указанием текущего времени и соединяют линиями с ранее нанесенными координатами, получая траекторию движения водолаза.
3. Способ по п. 2, отличающийся тем, что момент времени излучения с судна адресного сигнала по гидроакустическому каналу tис выбирают в ручном режиме или устанавливают в автоматическом режиме.
| Устройство для сигнализации обгона безрельсового транспорта | 1957 |
|
SU110503A1 |
| Станок для обточки деревянных бочек | 1952 |
|
SU97539A1 |
| ПЕЛЕНГАТОР ВОДОЛАЗА | 2012 |
|
RU2494914C1 |
| Капле распределитель фидера | 1959 |
|
SU125350A1 |
| US5331602 A1, 19.07.1994 | |||
| US5185725 A1, 09.02.1993. | |||

