Изобретение относится к горной промышленности и может быть использовано при открытой разработке месторождений полезных ископаемых, в частности, как в условиях неустойчивых вскрышных горных пород повышенной влажности и сыпучести, когда транспортирование и отвалообразование при использовании традиционных видов транспорта затруднено или невозможно, так и в условиях крепких устойчивых пород глубоких карьеров, когда целесообразно повышение высоты бортов до максимальных по условию устойчивости.
Известны применяемые для выемки, транспортирования и отвалообразования горной массы экскаваторы драглайны [Ржевский В.В. Открытые горные работы. Часть 1. - М.: Недра, 1985, с. 179-198]. Недостатками драглайнов являются: сравнительно небольшое расстояние транспортирования горной массы, равное удвоенному вылету стрелы, большая масса, высокие энергозатраты на транспортирование, обусловленные необходимостью разгонять и тормозить в течение цикла транспортирования поворотные части экскаваторов, имеющих значительную массу.
Также известны различные типы подвижных кабельных кранов и экскаваторов, канатных скреперов, канатных дорог, используемых для транспортирования горной массы и отвалообразования, конструкции которых основаны на подвешивании на двух или нескольких подвижных или неподвижных опорах несущих и тяговых канатов, на которых непосредственно или с помощью подъемных канатов закреплены транспортные или выемочно-транспортные емкости. Недостатки этих конструкций: ограниченная производительность, трудность перебазировки на новые участки карьера [Ржевский В.В. Открытые горные работы. Часть 1. - М.: Недра, 1985, с. 368-372].
Известно устройство для укладки грунта в гидроотвалы [СССР А.С. N 934001 E 21 C 41/00, E 21 C 45/00, 1982], пульпопровод которого поддерживается газовым баллоном, перемещение (поворот) пульпопровода осуществляется в обе стороны от осевой линии гидроотвала с помощью маневрового реверсивного электродвигателя с воздушным винтом, причем с постоянной скоростью, кроме маневрового электродвигателя, для поворота выпускной трубы служат съемные маневровые растяжки, наматываемые на барабаны лебедок. Недостатком данного устройства является фактически наличие двух параллельно работающих механизмов поворота, так как сменные маневровые растяжки должны быть практически постоянно закреплены на выпускной трубе в связи с тем, что электродвигатель может быть аварийно обесточен в любой момент, что при снятых маневровых растяжках может привести к произвольному повороту устройства, например, от порыва ветра. Кроме необходимости синхронизации работы канатного и воздушного винтового с пропеллером механизмов поворота выпускной трубы, к недостаткам относится использование в механизме поворота реверсивного электродвигателя с пропеллером, который имеет большую инерционность. Для изменения направления движения (поворота) необходимо остановить вращение электродвигателя и затем изменить его на противоположное, что требует в обоих случаях значительных затрат времени и дополнительных энергозатрат на торможение и разгон, исключает возможность использования механизма в устройствах со сравнительно малым периодом повторяемости процесса и необходимостью быстро изменить как величины, так и направление вектора тяги.
Из известных устройств для транспортирования горной массы наиболее близким по технической сущности является устройство для транспортирования горной массы [СССР А.С. N 1714129 A1, E 21 C 41/00, 47/04, 1992].
Это устройство для транспортирования горной массы состоит из транспортной магистрали, подвешенной стропами на газонаполненных баллонах легче воздуха, якорных установок для удержания указанных баллонов в рабочем положении. Транспортная магистраль выполнена в виде системы канатов, один из которых одним концом жестко прикреплен к емкости для горной массы, а другим концом через систему блоков, шарнирно закрепленных на силовом кольце через систему блоков, шарнирно закрепленных на силовом кольце баллона к барабану механизма вертикального перемещения емкости с возможностью намотки на барабан, установленный на ходовой платформе. Два других каната прикреплены одними концами к емкости, другими к барабанам механизмов управления горизонтальным перемещением емкости с возможностью их намотки на барабаны, установленные на ходовых платформах с якорными установками. Загрузка емкости горной массой производится известными способами, например, экскаватором или через конвейер.
Недостаток известной конструкции устройства для транспортирования горной массы заключается в том, что для горизонтального перемещения емкости используются два каната, прикрепленные к емкости, что снижает полезную грузоподъемность и производительность транспортной магистрали, так как часть грузоподъемности газонаполненных баллонов используется на поддержание в воздухе канатов механизма горизонтального перемещения. Также при больших длинах подвеса емкости, на центральной части маятниковой траектории движения придется тормозить до допустимых величин скорости сматывания и намотки канатов на барабаны [см. например, данные: Ржевский В.В. Открытые горные работы. Часть 1. - М. : Недра, 1985, с. 372; Белейцкий В.В., Левин Е.М. Динамика космических тросовых систем. - М.: Наука, Гл. ред. физ.-мат. лит., 1990, с. 261], что ведет к повышению расхода энергии на перемещение и снижение производительности. Кроме того, синхронизировать работу механизмов перемещения сложно. К недостаткам известной конструкции также относится низкая маневренность устройства - при необходимости изменить места загрузки или выгрузки производится перестановка одной или двух ходовых платформ с установленными на них механизмами управления горизонтальным перемещением, для загрузки емкости необходимо наличие на рабочей площадке погрузочного оборудования, например экскаватора или конвейера.
Задачей настоящего изобретения является повышение производительности и маневренности, снижение энергоемкости процесса транспортирования, материалоемкости и массы транспортной магистрали, повышение эффективности использования грузоподъемности газонаполненных баллонов, расширение функциональных возможностей устройства для транспортирования горной массы без значительного увеличения его массы.
Кроме того, задачей изобретения является упрощение и повышение безопасности операций сцепки-расцепки составных частей емкости для горной массы.
Для достижения поставленной задачи заявляемое устройство для транспортирования горной массы содержит следующую совокупность существенных признаков: транспортную магистраль, подвешенную стропами на газонаполненных баллонах легче воздуха, якорные установки для удержания указанных баллонов в рабочем положении. Транспортная магистраль выполнена в виде системы канатов, один из которых одним концом жестко прикреплен к емкости для горной массы, а другим концом через систему блоков, шарнирно закрепленных на силовом кольце баллона, к барабану механизма вертикального перемещения емкости с возможностью намотки на барабан, установленный на ходовой платформе. Механизм горизонтального перемещения емкости устройства для транспортирования горной массы выполнен в виде одного или нескольких реверсивных путем поворота лопастей, воздушных винтовых движителей регулируемого шага с шарнирно закрепленными по краям поворотных лопастей кольцевыми корпусами-маховиками нереверсивных двигательных установок, выполненных поворотными относительно вертикальной оси и размещенных на подвесной платформе, являющейся составным элементом емкости для горной массы.
Совокупность указанных общих существенных признаков дополняют, развивают и уточняют следующие частные существенные признаки, направленные на решение выше указанных задач.
Нереверсивные двигательные установки реверсивных, путем поворота лопастей, воздушных винтовых движителей регулируемого шага по выбору для конкретных параметров устройства оснащены двигателями внутреннего сгорания с подачей топлива из топливного бака, установленного на подвесной платформе (см. п.2 формулы изобретения).
Нереверсивные двигательные установки реверсивных, путем поворота лопастей, воздушных винтовых движителей регулируемого шага по выбору для конкретных параметров устройства оснащены электродвигателями, электроэнергия на которые подается по кабелю, пропущенному через систему блоков, установленных на силовом кольце газонаполненного баллона, и одним концом закрепленному на кабельном барабане, выполненном заодно с барабаном механизма управления вертикальным перемещением емкости, а другим - на подвесной платформе (см. п.3 формулы изобретения).
Емкость оснащена сменным транспортным сосудом, подвешиваемым к подвесной платформе на автоматически срабатывающие под действием силы тяжести грузозахватные устройства (см. п.4 формулы изобретения).
Грузозахватные устройства выполнены с разной по отношению друг к другу длиной подвески к подвесной платформе, грузоподъемные ловушки выполнены с разной по отношению друг к другу длиной подвески к сменному транспортному сосуду, причем длины подвесок выбраны так, что при расцепке задняя по ходу движения емкости точка зацепления грузозахватных устройств и грузоподъемных ловушек одноименного ряда находится выше, чем передняя по ходу емкости точка зацепления грузозахватных устройств и грузоподъемных ловушек другого ряда, а при сцепке сменного транспортного сосуда с подвесной платформой передняя по ходу точка зацепления находится выше, чем точка зацепления следующего по ходу грузозахватных устройств и грузоподъемных ловушек (см. п.5 формулы изобретения).
В качестве составного элемента емкости, вмещающего горную массу, используется грейфер (см. п.6 формулы изобретения).
В качестве головки грейфера используется подвесная платформа (см. п.7 формулы изобретения).
По выбору для конкретных параметров устройства используется двухканатный грейфер, при этом механизм замыкания грейфера устанавливается на одной из ходовых платформ, и его замыкающий канат, проходя через систему блоков, шарнирно закрепленных на силовом кольце газонаполненного баллона, блок траверсы грейфера закрепляется на подвесной платформе (см. п.8 формулы изобретения).
По выбору для конкретных параметров устройства используется приводной грейфер, энергия для привода которого передается с подвесной платформы (см. п.9 формулы изобретения).
По отношению к прототипу у предлагаемого устройства имеются следующие отличительные признаки.
Механизм горизонтального перемещения емкости устройства для транспортирования горной массы выполнен в виде одного или нескольких реверсивных путем поворота лопастей воздушных винтовых движителей регулируемого шага с шарнирно закрепленными по краям поворотных лопастей кольцевыми корпусами-маховиками нереверсивных двигательных установок, выполненных поворотными относительно вертикальной оси и размещенных на подвесной платформе, являющейся составным элементом емкости для горной массы. Механизм предназначен для горизонтального перемещения емкости, использование его обеспечивает повышение производительности и маневренности, снижение энергоемкости процесса транспортирования, материалоемкости и массы транспортной магистрали, повышение эффективности использования грузоподъемности газонаполненных баллонов.
Нереверсивные двигательные установки реверсивных воздушных винтовых движителей по выбору для конкретных параметров устройства для транспортирования горной массы оснащаются двигателями внутреннего сгорания с подачей топлива из топливного бака, установленного на подвесной платформе (см. п.2 формулы изобретения) или электродвигателями, электроэнергия на которые подается по кабелю, пропущенному через систему блоков, установленных на силовом кольце газонаполненного баллона, и одним концом закрепленному на кабельном барабане, выполненном заодно с барабаном механизма управления вертикальным перемещением емкости, а другим на подвесной платформе (см. п.3 формулы изобретения). Указанные нереверсивные двигательные установки предназначены для вращения реверсивных, путем поворота лопастей, воздушных винтовых движителей. Альтернативное применение того или другого типа двигательных установок при конкретных параметрах устройства для транспортирования горной массы обеспечивает снижение массы транспортной магистрали, повышение эффективности использования грузоподъемности газонаполненных баллонов.
Емкость оснащена сменным транспортным сосудом, подвешиваемым к подвесной платформе на автоматически срабатывающие под действием силы тяжести грузозахватные устройства, предназначенные для автоматической под действием сил тяжести расцепки-сцепки и обмена в зоне загрузки порожнего сосуда на заранее груженый другой сменный транспортный сосуд, что обеспечивает снижение цикла транспортирования и повышение производительности.
Грузозахватные устройства выполнены с разной по отношению друг к другу длиной подвески к подвесной платформе, грузоподъемные ловушки выполнены с разной по отношению друг к другу длиной подвески к сменному транспортному сосуду, причем длины подвесок выбраны так, что при расцепке задняя по ходу движения емкости точка зацепления грузозахватных устройств и грузоподъемных ловушек одноименного ряда находится выше, чем передняя по ходу емкости точка зацепления грузозахватных устройств и грузоподъемных ловушек другого ряда, а при сцепке сменного транспортного сосуда с подвесной платформой передняя по ходу точка зацепления находится выше, чем точка зацепления следующего по ходу ряда грузозахватных устройств и грузоподъемных ловушек. Указанное конструктивное исполнение грузозахватных устройств и грузоподъемных ловушек упрощает и повышает безопасность операций сцепки-расцепки составных частей емкости для горной массы.
В качестве составного элемента емкости, вмещающего горную массу, используется грейфер, обеспечивающий зачерпывание (погрузку) горной массы и ее транспортирование, что расширяет функциональные возможности устройства для транспортирования горной массы.
В качестве головки грейфера используется подвесная платформа, выполняя таким образом конструктивную функцию головки грейфера, что обеспечивает уменьшение суммарной массы подвесной платформы и грейфера и, следовательно, расширение функциональных возможностей устройства для транспортирования горной массы обеспечивается без значительного увеличения ее массы.
По выбору для конкретных параметров устройства для транспортирования горной массы используются различные типы грейферов: двухканатный грейфер, при этом механизм замыкания грейфера устанавливается на одной из ходовых платформ и его замыкающий канат, проходя через систему блоков, шарнирно закрепленных на силовом кольце газонаполненного баллона, блок траверсы грейфера закрепляется на подвесной платформе (см. п.8 формулы изобретения); или приводной грейфер, энергия для привода которого передается с подвесной платформы (см. п. 9 формулы изобретения). Указанные типы грейферов используются для зачерпывания горной массы. Альтернативное применение того или другого типа грейфера при конкретных параметрах устройства для транспортирования горной массы обеспечивает снижение массы транспортной магистрали, повышение эффективности использования грузоподъемности газонаполненных баллонов.
Между отличительными признаками и решаемыми задачами существует следующая причинно-следственная связь.
Реверсивные воздушные винтовые движители регулируемого шага механизма горизонтального перемещения не имеют ограничений по скорости, присущих канатным механизмам перемещения, что обеспечивает повышение производительности. Повышение маневренности в горизонтальной плоскости обеспечивается за счет поворота одного или нескольких реверсивных воздушных винтовых движителей регулируемого шага вокруг их вертикальных осей, что обеспечивает изменение направления вектора тяги и вместе с этим траектории движения емкости. При этом исключаются затраты времени на перестановку ходовых платформ, что также обеспечивает повышение производительности. Причем в варианте исполнения с несколькими реверсивными воздушными винтовыми движителями регулируемого шага траектория движения может быть изменена не только их поворотом вокруг вертикальной оси, но и за счет обеспечения на каждом реверсивном воздушном винтовом движителе регулируемого шага силы тяги, отличной от других как по величине, так и по направлению.
Снижение энергоемкости процесса транспортирования обеспечивается тем, что при установившемся движении перемещение по маятниковой траектории (схеме) обеспечивается фактически за счет сил гравитации и инерции. Реверсивные воздушные винтовые движители регулируемого шага при этом только компенсируют потери на сопротивление воздуха. Причем, учитывая, что аэродинамическое сопротивление пропорционально квадрату мгновенной скорости [Кухлинг Х. Справочник по физике: Пер. с нем. - М.: Мир, 1983, с. 129], значительное сопротивление будет только вблизи положения равновесия маятниковой схемы, когда емкость движется со скоростью, близкой к максимальной. Учитывая это, реверсивные воздушные винтовые движители регулируемого шага выполнены с поворотными лопастями, шарнирно закрепленными в кольцевых корпусах, играющих роль маховиков, которые обеспечивают силу тяги при больших скоростях и служат накопителями энергии при малых скоростях перемещения емкости. При этом лопасти устанавливаются так, что дают максимальную силу тяги или, наоборот, при накоплении энергии оказывают минимальное сопротивление вращению. Использование такой конструкции реверсивных воздушных винтовых движителей регулируемого шага позволяет установить двигатели меньшей мощности и, следовательно, массы и дает дополнительное снижение энергозатрат. Близкое техническое решение описано в [СССР. А.С. N 1213805 A, F 02 K 3/04], но в той конструкции лопатки вентилятора выполнены неповоротными и назначение корпуса - в снижении усилий, действующих на лопатки, а не выполнение роли маховика.
Снижение материалоемкости и массы транспортной магистрали обеспечивается тем, что механизм горизонтального перемещения с реверсивными воздушными винтовыми движителями регулируемого шага имеет значительно меньшую материалоемкость, чем канатный механизм горизонтального перемещения, состоящий из канатов барабанов, механизмов управления горизонтальным перемещением.
Учитывая, что устройство для транспортирования горной массы предназначается для перемещения горной массы на большие расстояния, масса механизма горизонтального перемещения с реверсивными воздушными винтовыми движителями регулируемого шага, подвешенного на канатах с газонаполненным баллоном, меньше, чем масса канатов аналогичного по параметрам канатного механизма горизонтального перемещения, также передающего через емкость нагрузку на газонаполненные баллоны, что позволяет при неизменной грузоподъемности газонаполненных баллонов повысить грузоподъемность емкости, то есть при этом повышается эффективность использования грузоподъемности газонаполненных баллонов.
Оснащение нереверсивных двигательных воздушных винтовых движителей регулируемого шага по выбору двигателями внутреннего сгорания с подачей топлива из топливного бака, установленного на подвесной платформе, или электродвигателями, электроэнергия на которые подается по кабелю, пропущенному через систему блоков, установленных на силовом кольце газонаполненного баллона, и одним концом закрепленного на кабельном барабане, выполненном заодно с барабаном механизма управления вертикальным перемещением, а другим - на подвесной платформе, обеспечивает возможность выполнения для конкретных параметров устройства двигательной системы - двигателя и энергоисточника (кабель или топливо и топливный бак) минимального веса, то есть обеспечивает снижение массы транспортной магистрали. Так, при сравнительно небольшой высоте подвеса емкости суммарная масса электродвигателей и кабеля будет меньше, чем масса двигателей внутреннего сгорания и топливного бака с запасом топлива. При значительных высотах подвеса суммарная масса двигателей внутреннего сгорания и топливного бака с запасом топлива будет меньше, чем масса электродвигателя и кабеля, имеющего значительную длину и массу.
Оснащение емкости сменным транспортным сосудом, подвешиваемым к подвесной платформе на автоматически срабатывающие под действием силы тяжести грузозахватные устройства с помощью установленных на сменном транспортном сосуде грузоподъемных ловушек, исключает затраты времени на простой под погрузкой емкости, что повышает производительность устройства для транспортирования горной массы.
Расположение длинных и коротких грузозахватных устройств и грузоподъемных ловушек выбирается так, что при отцепке сменного транспортного сосуда, происходящей по ходу движения емкости к точке поворота маятниковой траектории, короткое грузозахватное устройство рассоединяется с длинной грузоподъемной ловушкой и проходит над короткой грузоподъемной ловушкой другого узла сцепки, не задевая ее, а при захвате сменного транспортного сосуда, происходящем при обратном движении, короткое грузозахватное устройство также проходит над короткой грузоподъемной ловушкой другого узла сцепки, не задевая ее, и входит в захват с длинной грузоподъемной ловушкой своего узла сцепки: одновременно с этим на другом узле сцепки происходит захват длинного грузозахватного устройства короткой грузоподъемной ловушкой. Такое конструктивное решение узлов сцепки упрощает выполнение операций захвата и отцепки сменного транспортного сосуда, повышает безопасность операций обмена сменных транспортных сосудов.
Использование в качестве составного элемента емкости, вмещающего горную массу, грейфера исключает необходимость применения погрузочного оборудования, устройство из транспортного переходит в категорию выемочно-транспортных, то есть расширяются его функциональные возможности.
Использование при этом подвесной платформы в качестве головки грейфера позволяет получить необходимую для обеспечения зачерпывающей способности [Таубер Б.А. Грейферные механизмы. - М.: Машиностроение, 1985, с. 70] массу грейфера без увеличения массы устройства для транспортирования горной массы.
Возможность применения по выбору для конкретных параметров устройства двухканатного, или приводного грейфера обеспечивает возможность при конкретной высоте подвеса выбрать конструктивное исполнение с минимальной массой устройства.
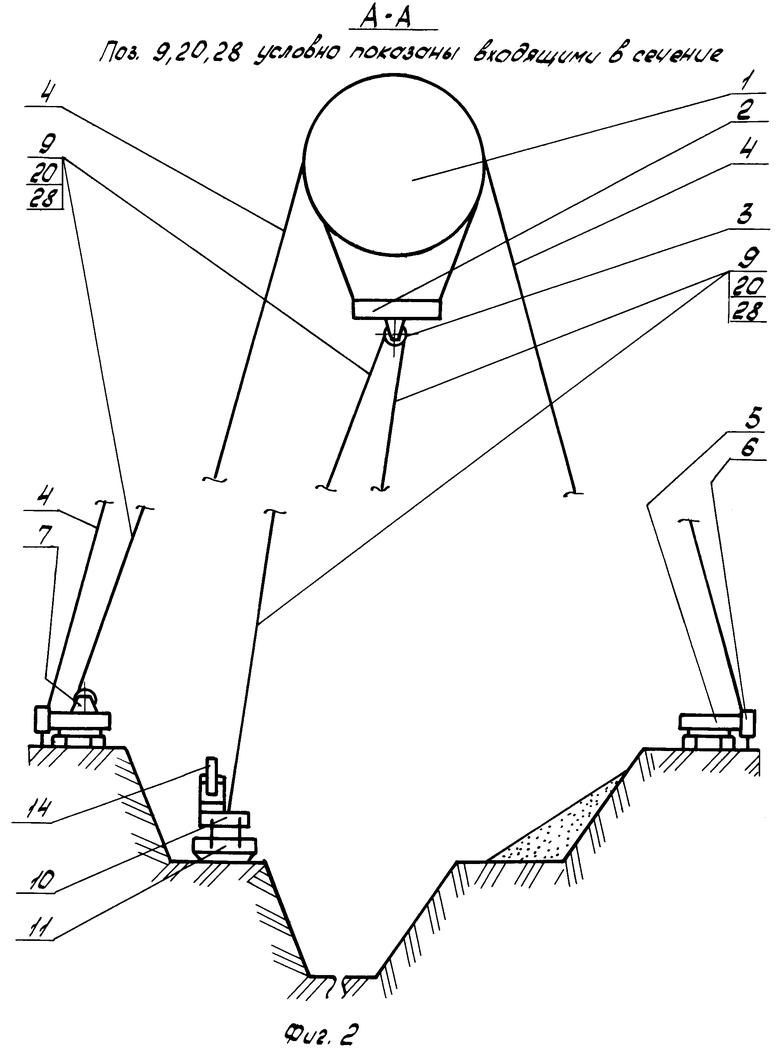
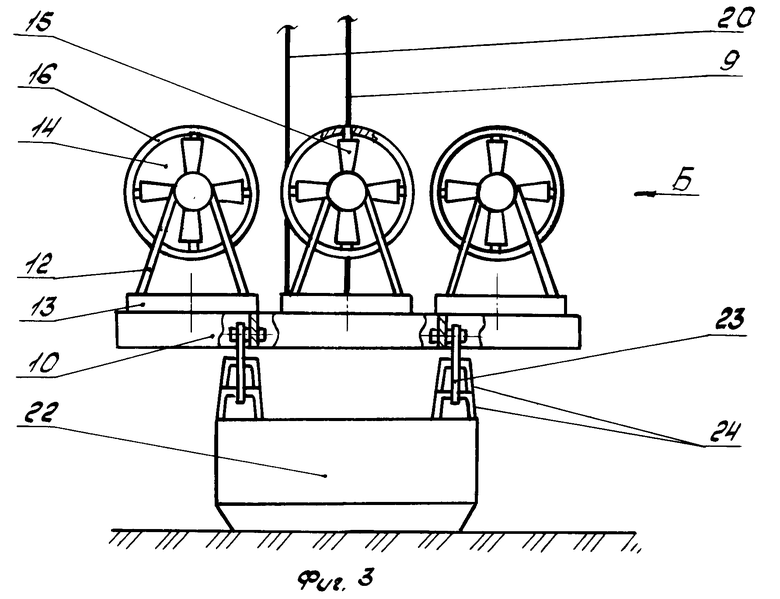
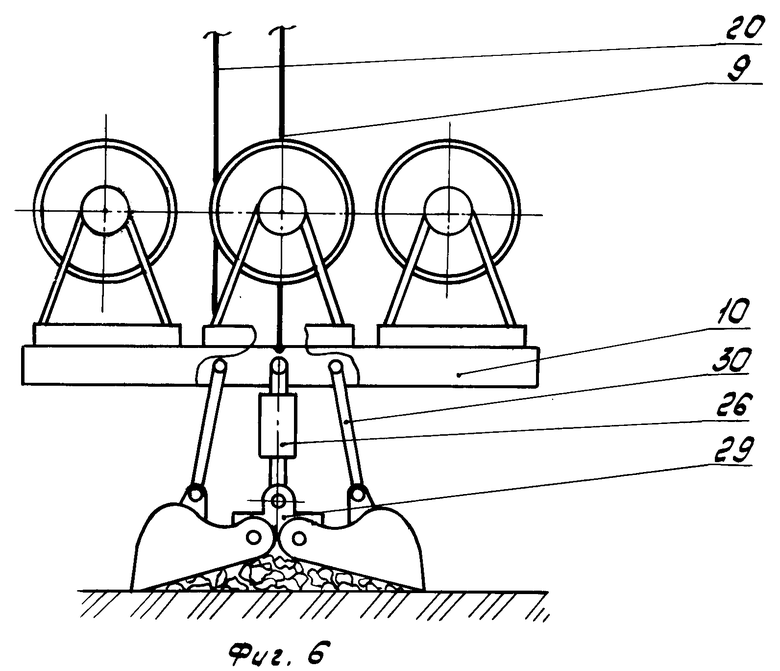
На фиг. 1 изображено устройство для транспортирования горной массы, вид сверху; на фиг. 2 - то же, сечение А-А; на фиг. 3 - подвесная платформа с реверсивными воздушными винтовыми движителями регулируемого шага и сменным транспортным сосудом; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - подвесная платформа с канатным, двухканатным грейфером; на фиг. 6 - то же, с приводным грейфером.
Устройство для транспортирования горной массы состоит из газонаполненного баллона 1, снабженного силовым кольцом 2 с шарнирно закрепленной на нем системой блоков 3, удерживаемого канатными растяжками 4, закрепленными на ходовых платформах 5 с якорными устройствами 6.
На одной из ходовых платформ 5 установлен механизм управления вертикальным перемещением 7 с канатным барабаном 8, на котором одним концом закреплен подъемный канат 9, пропущенный через систему блоков 3, другим концом закрепленный на подвесной платформе 10, являющейся составным элементом емкости 11 для горной массы.
На подвесной платформе 10 установлены нереверсивные двигательные установки 12 с механизмами поворота 13 их относительно вертикальной оси. Нереверсивные двигательные установки 12 соединены с реверсивными путем поворота лопастей воздушными винтовыми движителями изменяемого шага 14, поворотные лопасти 15 которых шарнирно закреплены в корпусах маховиках 16.
Нереверсивные двигательные установки 12 по выбору оснащены двигателями внутреннего сгорания 17 с подачей топлива из топливного бака 18, установленного на подвесной платформе 10, или электродвигателями 19, электрический кабель которых пропущен через систему блоков 3, установленных на силовом кольце 2, и одним концом закреплен на кабельном барабане 21; выполненном заодно с канатным барабаном 8 механизма управления вертикальным перемещением 7, а другим концом закреплен на подвесной платформе 10.
Емкость 11 может содержать сменный транспортный сосуд 22, подвешиваемый на автоматически срабатывающие под действием силы тяжести, шарнирно закрепленные на подвесной платформе 10 грузозахватные устройства 23, имеющие разную по отношению друг к другу длину подвеса к сменному транспортному сосуду 22. Причем длины подвесок выбраны так, что при расцепке задняя по ходу емкости 11 точка зацепления грузозахватного устройства 23 и грузоподъемной ловушки 24 одноименного ряда находится выше, чем передняя по ходу емкости 11 точка зацепления грузозахватного устройства 23 и грузоподъемной ловушки 24 другого ряда, а при сцепке сменного транспортного сосуда 22 с поворотной платформой 10 передняя по ходу точка зацепления находится выше, чем точка зацепления следующего ряда грузозахватного устройства 23 и грузоподъемной ловушки 24.
В качестве составного элемента емкости 11, вмещающей горную массу, может быть использован двухканатный грейфер 25 или приводной 26 грейфер. При использовании двухканатного грейфера 25 лебедка механизма замыкания 27 грейфера устанавливается на одной из ходовых платформ 5, а замыкающий канат 28, проходя через систему блоков 3, блок траверсы 29 двухканатного грейфера 25, закрепляется на подвесной платформе 10, выполняющей функции головки грейфера, к которой также шарнирно закрепляются тяги 30 двухканатного грейфера 25. При использовании приводного грейфера 26 в качестве головки грейфера также используется подвесная платформа 10, к которой шарнирно крепятся тяги 30 приводного грейфера 26. Энергия для привода приводного грейфера 26 передается с подвесной платформы 10.
Устройство работает следующим образом.
Производится загрузка емкости 11 горной массой на рабочей площадке вскрышного или добычного забоя любым из известных способов (например, экскаватором или конвейером), включается механизм управления вертикальным перемещением 7, подъемный канат 9, наматываясь на канатный барабан 8, через систему блоков 3 начинает поднимать емкость 11 с входящей в ее состав подвесной платформой 10 над рабочей площадкой. При этом подъемный канат 9, отклоненный от вертикали, совместно с емкостью 11 и входящей в ее состав платформой 10 под действием силы тяжести начинает перемещаться по траектории маятника к положению равновесия, при этом механизм управления вертикальным перемещением 7 при наборе заданной высоты отключается. Одновременно с началом подъема поворотные лопасти 15 реверсивных воздушных винтовых движителей изменяемого шага 14 выводятся из режима нейтральной тяги и устанавливаются под углом, обеспечивающим необходимую для преодоления сопротивления воздуха подвижным частям устройства тягу. По мере приближения емкости 11 к средней точке (положению равновесия) амплитуды маятниковой траектории скорость движения возрастает, возрастает и сопротивление воздуха; для компенсации возрастающих потерь на сопротивление воздуха поизводят постепенное, соответствующее увеличение силы тяги воздушных реверсивных винтовых движителей регулируемого шага 14 путем поворота (изменения шага) лопастей 15. После прохождения средней точки скорость емкости и соответственно сила сопротивления воздуха уменьшается. Тягу реверсивных воздушных винтовых движителей регулируемого шага 14 при этом соответственно уменьшают. Разгрузка емкости 11 происходит любым известным способом: путем открывания днища (с использованием дистанционного управления) над зоной разгрузки в любой точке маятниковой траектории или путем опускания емкости 11 при включении механизма управления вертикальным перемещением 7 на опускание, на поверхности земли в зоне, близкой к крайней точке амплитуды маятниковой траектории, где скорость перемещения емкости 11 равна или меньше допускаемой посадочной скорости (линейной скорости встречи с землей), при этом поворотные лопасти 15 реверсивных воздушных винтовых движителей регулируемого шага 14 устанавливаются в положение нейтральной тяги. Причем место разгрузки может быть изменено путем создания при повороте лопастей 15 реверсивных воздушных винтовых движителей регулируемого шага 14, при движении емкости 11 по маятниковой траектории, дополнительного корректирующего тормозного или разгонного импульса тяги, при котором крайняя точка амплитуды соответственно приблизится или удалится от средней точки. Возврат емкости 11 в зону загрузки при ее разгрузке без опускания на поверхность происходит после того как она по инерции дойдет до крайней точки амплитуды и начнет обратное движение по маятниковой траектории, или при разгрузке с опусканием на поверхность, возврат происходит аналогично ее движению в зону разгрузки после включения механизма управления вертикальным перемещением 7 на подъем емкости 11. При этом в обоих случаях реверсивные воздушные винтовые движители регулируемого шага 14 путем поворота лопастей 15 реверсируют тягу и работают на участке возврата также в режиме, компенсирующем сопротивление воздуха. Если при движении в зону разгрузки была выполнена тормозная или разгонная коррекция движения, то при возврате в зону загрузки реверсивные воздушные винтовые движители регулируемого шага 14 также должны выполнить дополнительный корректирующий, соответственно разгонный или тормозной импульс, обеспечивающий приход в первоначальную или заданную точку загрузки с допустимой посадочной скоростью. В зоне загрузки механизм управления вертикальным перемещением 7 работает на опускание, обеспечивая опускание на поверхность емкости 11, после чего производится ее повторная загрузка горной массой и цикл повторяется.
Маневрирование в зонах загрузки и разгрузки, изменение траектории транспортирования емкости 11 для создания веерной зоны разгрузки при отвалообразовании, а также обеспечение заданной траектории движения при боковом ветре осуществляется при наличии одного или нескольких движителей отклонением вектора тяги реверсивных воздушных винтовых движителей регулируемого шага 14 в необходимом направлении путем поворота нереверсивных двигательных установок 12 механизма поворота 13 или при наличии нескольких нереверсивных двигательных установок 12 - путем работы каждого реверсивного воздушного винтового движителя регулируемого шага 14 в заданном режиме тяги, отличном от других по величине, а при необходимости и по направлению, что обеспечивает поворот подвесной платформы 10 относительно вертикальной оси и изменение траектории транспортирования. Также возможно и маневрирование путем одновременного применения обоих вариантов.
При оснащении емкости 11 сменными транспортными сосудами 22 для горной массы устройство работает следующим образом.
Сменный транспортный сосуд 22, подвешенный на шарнирно закрепленных на подвесной платформе 10 грузозахватных устройствах 23, имеющих разную по отношению друг к другу длину подвеса к подвесной платформе 10, с помощью установленных на сменном транспортном сосуде 22 грузоподъемных ловушек 24, имеющих также разную по отношению друг к другу длину подвеса к сменному транспортному сосуду 22, выполняет цикл транспортирования по вышеуказанной схеме. При подходе порожней емкости 11 к зоне загрузки работой реверсивных воздушных винтовых движителей регулируемого шага 14, механизмом поворота 13 и механизмом управления вертикальным перемещением 7 в заданных режимах обеспечивается касание сменным транспортным сосудом 22 поверхности земли в заданной точке. При касании земли сменным транспортным сосудом 22 нагрузка на грузозахватные устройства 23 от веса сменного транспортного сосуда 22 исчезает, механизм управления вертикальным перемещением 7 при этом определенное время еще работает на опускание, а подвесная платформа 10 продолжает движение вперед по ходу емкости 11, при этом грузозахватные устройства 23 автоматически выходят из зацепления с грузоподъемными ловушками 24, обеспечивая отцепку порожнего сменного транспортного сосуда 22. При этом задние по ходу емкости 11, более короткие грузозахватные устройства 23 проходят над передними по ходу емкости 11 короткими грузоподъемными ловушками 24 другого ряда, не задевая их. Подвесная платформа 10 при этом продолжает двигаться по инерции вперед, начиная в этот момент с помощью реверсивных воздушных винтовых движителей регулируемого шага 14 и механизма поворота 13 маневр захода на груженый сменный транспортный сосуд 22. Пройдя крайнюю точку амплитуды траектории маятника и продолжая маневр захода, подвесная платформа 10 в начальной фазе нового цикла на посадочной скорости проходит над груженным сменным транспортным сосудом 22. При этом соответствующие грузозахватные устройства 23 и грузоподъемные ловушки 24 касаются друг друга и автоматически в начале работы механизма управления вертикальным перемещением 7 на подъем подвесной платформы 10 входят в зацепление друг с другом, обеспечивая зацеп груженого сменного транспортного сосуда 22, далее цикл транспортирования идет по вышеуказанной схеме. Причем разное по высоте расположение точек зацепления (передняя по ходу движения выше) также исключает случайный зацеп передним грузозахватным устройством 23 задней ловушки 24.
При использовании в качестве составного элемента емкости 11, вмещающего горную массу двухканатного грейфера 25 или приводного грейфера 26, устройство работает следующим образом. При использовании двухканатного грейфера 25 пустой раскрытый грейфер опускается на материал, подъемный 9 и замыкающий 28 канаты имеют одинаковую скорость, механизм управления вертикальным перемещением 7 и лебедка механизма замыкания 27 работают синхронно. При касании материала механизм управления вертикальным перемещением 7 включается немного позже лебедки механизма замыкания 27, что обеспечивает ослабление подъемного каната 9, подвесная платформа 10 с двухканатным грейфером 25 при этом висит на замыкающем канате 28, затем включается лебедка механизма замыкания 27 на подъем, замыкающий канат 28 обеспечивает смыкание челюстей и зачерпывание двухканатным грейфером 25 материала. В момент смыкания челюстей включается механизм управления вертикальным перемещением 7, выбирается слабина подъемного каната 9, при этом обеспечивается равномерное распределение нагрузки на подъемный 9 и замыкающий 28 канаты, механизмы работают синхронно, обеспечивая подъем двухканатного грейфера 25 на необходимую высоту. В момент отрыва грейфера от поверхности материала он начинает перемещаться по выше указанной маятниковой схеме. Над зоной разгрузки челюсти двухканатного грейфера 25 раскрываются, при ослаблении замыкающего каната 28 и неподвижном подъемном канате 9, под действием собственного веса двухканатного грейфера 25 и материала происходит разгрузка, после чего подвесная платформа 10 с грейфером, продолжая маятниковое движение, возвращается в зону загрузки и цикл транспортирования повторяется.
При перемещении приводного грейфера 26 подъем и опускание грейфера происходит при включении механизма управления вертикальным перемещением 7. Зачерпывание материала и разгрузка происходят соответственно при смыкании или размыкании челюстей приводными механизмами, входящими в состав приводного грейфера 26, энергия для привода которых подается с подвесной платформы 10. При использовании в качестве головок двухканатного 25 и приводного 26 грейферов подвесной платформы 10, к которой шарнирно крепятся тяги 30 грейфера включается масса подвесной платформы 10, обеспечивая при этом своей массой создание части необходимого для процесса зачерпывания напорного усилия.
Входящие в состав устройства для транспортирования горной массы реверсивные воздушные винтовые движители регулируемого шага 14, как показано выше, обеспечивают маневрирование на маятниковой траектории и компенсацию потерь от сопротивления воздуха. В течение цикла транспортирования путем поворота лопастей 15 сила тяги изменяется от нулевой до максимальной и обратно. Нереверсивные двигательные установки 12 при этом работают в режиме постоянной мощности, которая выше мощности режима нулевой тяги, но ниже мощности, необходимой для создания максимальной тяги. В режимах малой тяги избыток мощности нереверсивных двигательных установок 12 затрачивается на увеличение скорости вращения элементов реверсивных воздушных винтовых движителей регулируемого шага 14, в том числе кольцевых корпусов-маховиков 16, шарнирно закрепленных на поворотных лопастях 15, при этом аккумулируется механическая энергия, в режимах тяги, когда мощность нереверсивных двигательных установок 12 недостаточна, происходит уменьшение скорости вращения реверсивный воздушных винтовых движителей регулируемого шага, при этом запасенная в кольцевых корпусах-маховиках 16 и вращающихся частях реверсивных воздушных винтовых движителей регулируемого шага 14 механическая энергия расходуется на поддержание необходимой силы тяги. Шарнирное крепление передает возникающие при ускорении, замедлении вращения кольцевых корпусов-маховиков 16 усилия на лопасти 15, не препятствуя их повороту.
В качестве нереверсивных двигательных установок 12 используются двигатели внутреннего сгорания 17, при этом топливо подается из топливного бака 18, установленного на подвесной платформе 10, или электродвигатели 19, электроэнергия на которые подается по кабелю 20, закрепленному на подвесной платформе 10. При этом кабель 20 движется синхронно с подъемным канатом 9, проходя через систему блоков 3 и наматываясь на кабельный барабан 21, выполненный заодно с барабаном 8.
После отработки участка карьера освобождаются якорные устройства 6, ходовые платформы 5 с помощью канатных растяжек 4 перемещают газонаправленный баллон 1 на новый участок, после чего якорные устройства закрепляются и начинается транспортирование горной массы.
Предложенное устройство для транспортирования горной массы по сравнению с прототипом имеет следующие технико-экономические преимущества.
В отличие от прототипа, имеющего канатный механизм горизонтального перемещения, состоящий из лебедок и тяговых канатов, которые, учитывая большое расстояние транспортирования, должны иметь значительные габариты и массу, имеющего ограничения по скорости намотки канатов на барабан и, следовательно, ограничения и по скорости движения по маятниковой траектории, кроме того, использующего часть грузоподъемности газонаполненного баллона на поддержание в воздухе указанных канатов в заявленном устройстве для горизонтального перемещения применены реверсивные воздушные винтовые движители регулируемого шага и двигательные установки с двигателями внутреннего сгорания или электродвигателями, основной функцией которых является компенсация потерь на сопротивление воздуха, требующая в предполагаемых диапазонах скоростей до 30-40 м/с сравнительно низких энергозатрат, движение по маятниковой траектории при этом происходит под действием сил гравитации и инерции, такие системы, как показывает практика авиастроения, имеют незначительный вес. Кроме того, мощность и, следовательно, массу двигательных установок позволяет снизить использование кольцевых корпусов-маховиков, служащих в течение цикла транспортирования аккумуляторами энергии при ее избытке и источниками при недостатке.
При использовании воздушных винтовых движителей регулируемого шага возможно веерное расположение зон загрузки и разгрузки, то есть работа без перестановок ходовых платформ значительное время, что невозможно при применении канатного механизма перемещения, требующего для перемещения зон загрузки, разгрузки передвижки ходовых платформ.
Использование сменных транспортных сосудов для горной массы снижает время простоя под загрузкой, увеличивает производительность устройства. Одновременно при этом на загрузке возможно применить экскаватор с меньшей вместимостью ковша или конвейер меньшей производительности. Так, при продолжительности цикла 75 с, вместимости емкости 15 куб.м возможно использовать на погрузке без простоя устройства для транспортирования горной массы, вместо экскаватора ЭКГ-8И (вместимость ковша 8 куб.м. цикл погрузки 26 с) экскаватора ЭКГ-5 (вместимость ковша 5 куб.м, цикл погрузки 23 с) [Справочник механика открытых работ. Экскавационно-транспортные машины циклического действия. - М.: Недра, 1989, с. 98].
Оснащение сменного транспортного сосуда устройства для транспортирования горной массы грузозахватными устройствами, выполненными с разной по отношению друг к другу длиной подвески к подвесной платформе и грузоподъемными ловушками, выполненными с разной по отношению друг к другу длиной подвески к сменному транспортному сосуду, исключает при расцепке (сцепке) случайное касание элементов сцепных устройств разноименных рядов грузоподъемных ловушек и грузозахватных устройств, повышая при этом безопасность выполнения операций расцепки (сцепки) со сменным транспортным сосудом.
Применение в качестве составного элемента емкости, вмещающего горную массу канатного или приводного грейфера, расширяет функциональные возможности устройства, при этом возможна работа без экскаваторов или конвейеров, возможно транспортирование горной массы из опасных или труднодоступных мест.
Предлагаемые варианты исполнения двигательных установок, различные типы конструктивного исполнения грейферов обеспечивают возможность выбора оптимальных по весовой отдаче вариантов для конкретных условий и параметров устройства для транспортирования горной массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования горной массы | 1990 |
|
SU1714129A1 |
| СПОСОБ УДАЛЕНИЯ ВЫХЛОПНЫХ ГАЗОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ИЗ КАРЬЕРНОГО ПРОСТРАНСТВА | 1996 |
|
RU2125653C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГОРНЫХ ПОРОД В КАРЬЕРЕ | 1995 |
|
RU2116450C1 |
| Устройство для транспортирования горной массы с глубоких горизонтов карьера | 1990 |
|
SU1789735A1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1992 |
|
RU2081327C1 |
| Способ транспортирования горной массы | 1990 |
|
SU1776795A1 |
| КОНТУРНОЕ ГОРНОЕ СООРУЖЕНИЕ ДЛЯ ВЫЕМКИ И ТРАНСПОРТИРОВКИ ПОДГОТОВЛЕННОГО РУДНОГО МАССИВА СО ДНА КАРЬЕРА | 2023 |
|
RU2815246C1 |
| УСТРОЙСТВО ДЛЯ ЭКСКАВАЦИИ ГОРНЫХ ПОРОД В КАРЬЕРЕ | 1998 |
|
RU2148714C1 |
| Транспортный комплекс карьера | 1991 |
|
SU1810547A1 |
| Транспортный комплекс карьера | 1990 |
|
SU1723323A1 |


Устройство для транспортирования горной массы предназначено для использования при открытой разработке полезных ископаемых. Устройство состоит из транспортной магистрали, выполненной в виде системы канатов, на конце одного из которых жестко закреплена емкость для горной массы, включающая подвесную платформу. Барабан механизма управления вертикальным перемещением емкости установлен на ходовой платформе. Механизм управления горизонтальным перемещением емкости выполнен в виде одного или нескольких реверсивных воздушных винтовых движителей регулируемого шага с шарнирно закрепленными по краям поворотных лопастей кольцевыми корпусами-маховиками нереверсивных двигательных установок. Нереверсивные двигательные установки могут быть выполнены с двигателями внутреннего сгорания или электродвигателя. В качестве составного элемента емкости для горной массы может быть использован грейфер различной конструкции. Устройство позволяет повысить производительность работ по транспортированию горной массы на отгрузку и в отвалы. 8 з.п.ф-лы, 6 ил.
| Устройство для транспортирования горной массы | 1990 |
|
SU1714129A1 |
| Устройство для перемещения горных пород в карьере | 1990 |
|
SU1751325A1 |
