Изобретение относится к области авиационной техники, в частности к системам автоматического управления посадкой на палубу корабля.
Известна светотехническая система посадки летательного аппарата (ЛА) на палубу корабля, установленная на стабилизированной платформе Павлено В.Ф. "Корабельные самолеты" М. Военное издательство 1990, стр. 260 [1]. Оптический блок системы состоит из пяти линзовых ячеек, расположенных одна над другой, каждая излучает световой пучок в азимутальной и вертикальных плоскостях, причем три средние ячейки дают желтый цвет (по глиссаде планирования), верхняя - постоянный белый, а нижняя - красный проблесковый. По обеим сторонам средней ячейки находятся проблесковые зеленые огни разрешения посадки и вертикальные красные - запрета. Справа и слева от последних, на одном уровне с центральной ячейкой оптического блока размещены зеленые опорные огни. Когда ЛА при заходе на посадку входит в луч глиссады, летчик видит желтые и зеленые огни на одном уровне. Удерживание их на одном уровне позволяет совершать точную посадку на авианосный корабль.
Однако данная система обеспечивает посадку ЛА на палубу в простых метеоусловиях. Система не обеспечивает полеты по глиссаде в сложных гидрометеоусловиях, посадка при большом волнении моря (4 - 5 баллов) по такой системе невозможна. Нередки случаи аварий во время полетов, прежде всего при посадке на палубу корабля ночью.
Известна система автоматической посадки типа SPN-42 [1], содержащая посадочную радиолокационную станцию, систему автоматического управления, вычислитель наземной и бортовой линий передач сигналов управления, в вычислитель которой поступают входные сигналы параметров полета и движения корабля по дифференту, крену, рысканию и вертикальной качки для обеспечения стабилизированной глиссады. Посредством линий передач сигналов управления (ЛПСУ) корабельной системы команды передают в бортовое оборудование автоматической посадки ЛПСУ, которая направляет их в систему автоматического управления (САУ), осуществляющую необходимые изменения углов тангажа и крена для выведения ЛА на расчетную глиссаду и курс. В автоматическую систему посадки входит устройство для выдерживания относительно постоянной скорости во время маневрирования при заходе на посадку.
При заходе на посадку на палубу корабля применяется метод пилотирования по постоянной глиссаде (постоянному углу атаки при постоянной скорости полета). Положение ручки управления двигателем (РУД), подобранное в процессе снижения по глиссаде, сохраняется до касания палубы, когда может потребоваться "полный газ", чтобы обеспечить необходимую тягу для ухода на второй круг. Для этого используется автомат тяги, автоматически регулирующий воздушную скорость в заданных пределах.
Одной из основных причин, усложняющих процесс посадки, являются случайные перемещения посадочной площадки вследствие морского волнения. При выполнении посадки на колеблющуюся случайным образом палубу увеличивается диапазон изменения параметров, характеризующих движение ЛА в момент касания палубы корабля. Это в конечном счете приводит к ухудшению точностных характеристик и безопасности посадки. При достаточно сильном волнении морской поверхности (более 6 баллов) посадка вообще невозможна.
Изобретение направлено на повышение точности и безопасности посадки ЛА на палубу корабля за счет управления скоростью самолета для выполнения касания палубы в момент нахождения палубы в точке с максимальным отклонением над уровнем моря.
Управление скоростью при посадке ЛА может быть обеспечено за счет того, что спектральная плотность колебаний палубы S(ω) = Aω2/(Bω2+(C-ω))2 является достаточно узкополосной, т.е. случайные колебания палубы близки к периодическим. При этом в процессе просадки этот средний период колебаний меняется незначительно. При таких характеристиках морского волнения можно представить, что по глиссе, по которой снижается ЛА с постоянной скоростью v0, движутся некоторые расчетные точки с той же скоростью v0 и отстоящие друг от друга на расстоянии v0 Tср (Tср - средний период колебаний палубы), которые будут касаться палубы корабля в тот момент времени, когда она достигает максимального верхнего положения над средним уровнем морской поверхности.
Если в процессе начала захода на посадку управлять скоростью ЛА так, чтобы его положение на глиссаде совместилось с положением такой, ближайшей к нему расчетной точкой и в дальнейшем это положение сохранялось, то ЛА коснется палубы корабля в тот момент времени, когда она находится в верхнем положении. При таких условиях касания палубы, т.е. в тот момент времени, когда она находится в максимально верхнем положении и ее вертикальная скорость перемещения близка к нулю, уменьшается возможный диапазон изменения параметров движения ЛА при касании. Это в конечном счете приводит к повышению безопасности и точности посадки за счет системы управления скоростью ЛА при посадке на палубу корабля.
Сущность изобретения состоит в том, что в палубное оборудование автоматической посадки, содержащее датчик перемещения палубы в точке касания ЛА, дальномерный канал посадочной радиолокационной станции (ПРЛС), блок единого времени, выход которого соединен с входами датчика перемещения палубы в точке касания и дальномерного канала ПРЛС, линию передачи сигналов управления на корабле, бортовое оборудование автоматической посадки, содержащее систему автоматического управления с информационными датчиками углового и линейного положения, последовательно соединенные автомат тяги с сумматором, сервопривод и ручку управления двигателем, директорный прибор, линию передачи сигналов управления на ЛА, соединенную с системой автоматического управления, выход которой соединен с первым входом сумматора автомата тяги, согласно изобретению дополнительно введены последовательно соединенные блок выделения временного положения среднего периода качки, первый вход которого соединен с выходом блока единого времени, а второй вход соединен с выходом датчика перемещения палубы, счетчик импульсов качки и вычислитель разности текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде, задатчик уставки скорости v0, выход которого соединен с вторым входом вычислителя, блок определения среднего периода качки, первый вход которого соединен с выходом блока выделения временного положения максимума качки, второй вход соединен с вторым выходом счетчика импульсов качки, а выход соединен с третьим входом вычислителя, выход блока выделения временного положения максимума качки соединен с четвертым входом вычислителя, пятый вход которого соединен с выходом блока единого времени, схема совпадения И, первый вход которой соединен с выходом блока выделения временного положения максимума качки, выход соединен с шестым входом вычислителя, а второй вход объединен с седьмым входом вычислителя и соединен с выходом дальномерного канала ПРЛС, выход вычислителя соединен с линией передачи сигналов на корабле, в бортовое оборудование автоматической посадки введен вычислитель сигнала управления по дальности, первый вход которого соединен с выходом линии передачи сигналов управления на ЛА, выход соединен с вторым входом сумматора автомата тяги и входом директорного прибора, а второй вход соединен с выходом системы автоматического управления ЛА. Вычислитель разности текущей дальности до расчетного положения ЛА на глиссаде выполнен в виде блока обновления начальных данных и включения решения, последовательно соединенных первого блока умножения, блока деления, блока выделения дробных величин, второго блока умножения, второй вход которого соединен с выходом первого блока умножения, а выход - с первым входом первого сумматора, последовательно соединенных второго сумматора и третьего блока умножения, выход которого соединен с вторым входом первого сумматора, при этом вход блока обновления начальных данных и включения решения является первым входом вычислителя разности текущей дальности до ЛА и дальности до расчетного положения на глиссаде, первый вход первого блока умножения и второй вход третьего блока умножения объединены и являются его вторым входом, второй вход первого блока умножения является его третьим входом, первый и второй входы второго сумматора соответственно являются его четвертым и пятым входами, второй вход блока деления и третий вход первого сумматора объединены и являются его шестым входом, четвертый вход первого сумматора является его седьмым входом, а выход первого сумматора является его выходом. Вычислитель сигналов управления по дальности выполнен в виде последовательно соединенных первого усилителя, изодромного фильтра и сумматора, а также второго усилителя, выход которого соединен с вторым входом сумматора, причем входы первого и второго усилителей объединены и являются первым входом вычислителя сигналов управления по дальности, вход сумматора и его выход соответственно являются его вторым входом и выходом.
Сущность изобретения поясняется на фиг. 1, на которой представлена блок-схема системы управления скоростью, на фиг. 2 представлена кинематическая схема посадки на палубу корабля и на фиг. 3 - принципиальная схема блока выделения временного положения экстремумов, на фиг. 4 показаны переходные процессы при поиске максимумов функции H(t) колебаний палубы, где показаны 1 - блок выделения временного положения максимума; 2 - датчик перемещения палубы в точке касания; 3 - дальномерный канал посадочной радиолокационной станции (ПРЛС); 4 - счетчик импульсов качки; 5 - блок определения среднего периода Tср вертикальной качки корабля; 6 - блок единого времени; 7 - схема совпадения И; 8 - датчик уставки скорости v0; 9, 14, 25, 26 - сумматоры; 10 - вычислитель разности текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде; 11 - блок обновления начальных данных и включения решения; 12, 13, 17 - блоки умножения; 15 - блок деления; 16 - блок выделения дробных величин; 18 - линия передачи сигналов управления (ЛПСУ) на корабле; 19 - ЛПСУ на борту ЛА; 20 - система автоматического управления (САУ) с информационными датчиками углового и линейного положения; 21 - вычислитель сигналов управления по дальности; 22, 23 - усилители; 24 - изодромный фильтр; 27 - автомат тяги (АТ) с сервоприводом; 28 - директорный прибор; 29 - ручка управления двигателем (РУД); 30 - летчик; 31 - электромагнитная муфта; 32 - двигатель; 33 - схема регулирования двигателей; 34 - резисторы; 35 - контакт; 36 - интегрирующий усилитель (интегратор); 37 - инвертор; 38 - реле; 39 - компаратор; 40 - блок зоны нечувствительности.
Палубное оборудование автоматической посадки содержит датчик 2 перемещения палубы в точке касания ЛА, дальномерный канал ПРЛС 3, блок единого времени 1, выход которого соединен с входами датчика 2 перемещения палубы в точке касания и дальномерного канала ПРЛС 3, ЛПСУ 18 на корабле.
В палубном оборудовании последовательно соединены блок 1 выделения временного положения среднего периода качки, первый вход которого соединен с выходом блока 6 единого времени, а второй вход соединен с выходом датчика 2 перемещения палубы, счетчик импульсов качки 4 и вычислитель 10 разности текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде. Выход задатчика 8 уставки скорости v0 соединен с вторым входом вычислителя 10. Первый вход блока 5 определения среднего периода качки соединен с выходом блока 1 выделения временного положения максимума качки, второй вход блока 5 соединен с вторым выходом счетчика 4 импульсов качки, а выход блока 5 соединен с третьим входом вычислителя 10. Выход блока 1 выделения временного положения максимума качки соединен с четвертым входом вычислителя 10, пятый вход которого соединен с выходом блока 6 единого времени. Первый вход схемы совпадения И 7 соединен с выходом блока 1 выделения временного положения максимума качки, второй вход объединен с седьмым входом вычислителя 10 и соединен с выходом дальномерного канала ПРЛС 3, а выход схемы совпадений И 7 соединен с шестым входом вычислителя 10. Выход вычислителя 10 соединен с ЛПСУ 18 на корабле. В вычислителе 10 разности текущей дальности до расчетного положения ЛА на глиссе, включающем блок 11 обновления начальных данных и включения решения, последовательно соединены первый блок умножения 12, блок деления 15, блок 16 выделения дробных величин, второй блок умножения 17, второй вход которого соединен с выходом первого блока умножения 12, а выход - с первым входом первого сумматора 14. В вычислителе 10 последовательно соединены второй сумматор 9 и третий блок умножения 13, выход которого соединен с вторым входом первого сумматора 14. Вход блока 11 обновления начальных данных и включения решения является первым входом вычислителя 10 разности текущей дальности до ЛА и дальности до расчетного положения на глиссаде, в котором первый вход первого блока умножения 12 и второй вход третьего блока умножения 13 объединены и являются его вторым входом. В вычислителе 10 второй вход первого блока умножения 12 является его третьим входом, первый и второй входы второго сумматора 9 соответственно являются его четвертым и пятым входом, второй вход блока деления 15 и третий вход первого сумматора 14 объединены и являются его шестым входом, четвертый вход первого сумматора 14 является его седьмым входом, а выход первого сумматора 14 является его выходом. Бортовое оборудование автоматической посадки содержит САУ 20 с информационными датчиками углового и линейного положения, последовательно соединенные автомат тяги 27 с сервоприводом и сумматором 26, ручку управления двигателем 29, директорный прибор 28, ЛПСУ 19 на ЛА, соединенную с САУ 20, выход которой соединен с первым входом сумматора 26, автомата тяги 27. Первый вход вычислителя сигнала управления по дальности 21 соединен с выходом ЛПСУ 19 на ЛА, а выход вычислителя 21 соединен с вторым входом сумматора 26 автомата тяги 27 и входом директорного прибора 28, а второй вход вычислителя 21 соединен с выходом САУ 20. В вычислителе 21 сигналов управления по дальности последовательно соединены первый усилитель 23, изодромный фильтр 24 и сумматор 25, а выход второго усилителя 22 соединен с вторым входом сумматора 25. Входы первого 23 и второго 22 усилителей объединены и являются первым входом вычислителя 21 сигналов управления по дальности, вход сумматора 25 и его выход соответственно являются его вторым входом и выходом.
Система работает следующим образом.
Работа системы заключается в запоминании дальности до ЛА в момент нахождения палубы в максимальном положении над уровнем моря tm D(tm), определении разности текущей и расчетной дальности до ЛА, фиг. 2. Для этого в блоке 4 вычисляют максимум H(t) и моменты времени появления максимумов  Сигналы H(t) поступают из датчика перемещения палубы в точке касания ЛА 2, который выполнен на основе интегрирования сигналов акселерометров. Поиск экстремумов функции H(t) одной из переменных сводится к поиску нескольких максимумов и приводит к локализации и уточнению значений времени t и функции H(t) точке экстремума. Для функции Н(t) одной переменной экстремумы считаются максимумы H(t). На изменение времени t накладываются ограничения в виде неравенства a≤t≤b, где a и b - границы интервала поиска. Равномерный поиск основан на том, что переменной t присваиваются значения t + Δ t с шагом Δ t = const и вычисляются значения H(t). Если H(tn+1) > H(tn), то переменной t дается новое приращение. Как только H(tn+1) станет меньше H(tn), поиск останавливается, или можно написать
Сигналы H(t) поступают из датчика перемещения палубы в точке касания ЛА 2, который выполнен на основе интегрирования сигналов акселерометров. Поиск экстремумов функции H(t) одной из переменных сводится к поиску нескольких максимумов и приводит к локализации и уточнению значений времени t и функции H(t) точке экстремума. Для функции Н(t) одной переменной экстремумы считаются максимумы H(t). На изменение времени t накладываются ограничения в виде неравенства a≤t≤b, где a и b - границы интервала поиска. Равномерный поиск основан на том, что переменной t присваиваются значения t + Δ t с шагом Δ t = const и вычисляются значения H(t). Если H(tn+1) > H(tn), то переменной t дается новое приращение. Как только H(tn+1) станет меньше H(tn), поиск останавливается, или можно написать
H(tn+1)-H(t0) = δn, n = 1...i.
Запоминается максимум H(t) при смене знака δn с плюса на минус; далее счет продолжается.
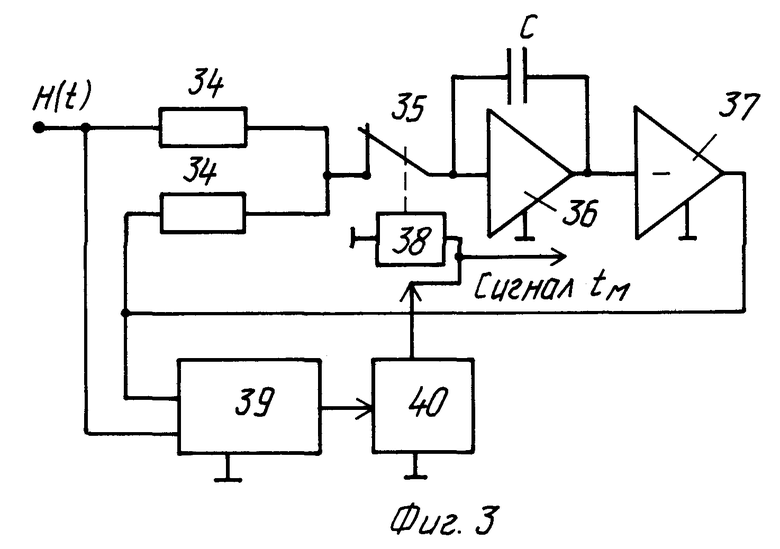
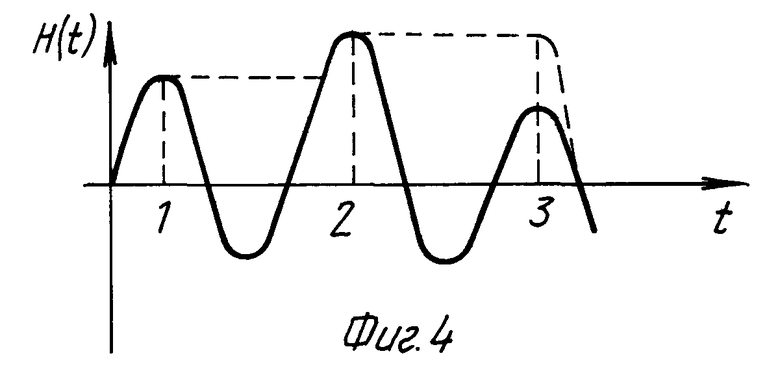
В аналоговом варианте этот алгоритм сводится к функциональной схеме, показанной на фиг. 3. Сигналы H(t) поступают на последовательно расположенные резистор 34, далее на замкнутые контакты 35 реле 38 и на интегратор 36. Изменение выходного значения интегратора 36 при запоминании максимумов показано на фиг. 4, переходные процессы данного блока заканчиваются при определении времени максимума. Далее сигналы с интегратора 36 поступают на интегратор 37 и с него идут на второй резистор 34, где суммируются с выходными сигналами, поступающими через первый резистор 34. Входной и инвертируемый сигналы поступают на вход компаратора 39, выходные сигналы которого поступают через блок 40 типа зоны нечувствительности на обмотку реле 38. При неравенстве входного и инвертируемого сигналов контакты 35 реле 38 замкнуты, при равенстве - разомкнуты, в это время с обмотки реле 38 подается импульс, соответствующий появлению максимума tm. В блок 1 глобальные максимумы  организованы во времени, для чего вход блока 1 связан с блоком 6 единого времени. Блок 6 единого времени выполнен на основе электронных часов с импульсным отсчетом времени.
организованы во времени, для чего вход блока 1 связан с блоком 6 единого времени. Блок 6 единого времени выполнен на основе электронных часов с импульсным отсчетом времени.
Импульсы tm времени максимумов подаются на счетчик импульсов 4, выполненный на основе триггеров, и на блок 5 определения среднего периода колебаний Tср. В блок 5 начальный отрезок импульсов tm запоминается в памяти и далее вычисляют на скользящем участке (рекурентно) средний период Tср вертикальной качки корабля согласно алгоритму.


где ti- время появления максимумов;
i - число импульсов максимумов.
Указанные сигналы подают в вычислитель 10 для определения разности текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде по общему алгоритму работы вычислителя 10
Δ Dрт = Dф - Dрт (tт);
Dрт(tт) = Dт(tм) - vо(tт-tм) - [Dт(tм)/vоTср]vоTср,
где Dт(tм) - дальность в момент времени нахождения положения палубы в максимальном положении до ЛА;
vо - скорость полета ЛА;
tм - время появления максимального отклонения палубы от уровня моря;
tт - текущее время;
Dрт(tт), Dф - дальность до расчетной точки и фактическая;
ΔDpт - разность фактической текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде для выполнения безопасности посадки.
Второй член в формуле учитывает временное запаздывание vо(tт-tм) при определении расчетной дальности, третий член [Dт(tм)/vоTср]vоTср учитывает текущее положение летательного аппарата от ближайшей расчетной точки положения ЛА на глиссаде для безопасной посадки. Сигналы с блока умножения 13 поступают в сумматор 14, где формируется разностный сигнал управления ΔDрт дальностью.
Вторая поправка коррекции дальности [Dт (tм)/vоTср] vоTср появляется вследствие необходимости вычислений из-за неполного периода колебаний, где [...] - число периодов. Это дробное число [...]vоTср характеризует ближайшую к ЛА точку положения его на глиссаде для выполнения безопасной посадки. Алгоритм выделения дробных величин, когда целые числа заменяются нулями, а остаются числа после запятой, следующий:
если [Dт(tм) / vоTср] > 1, то дробная часть числа;
если [Dт(tм) / vоTср] < 1, то возврат счета.
Для реализации этого алгоритма сигналы с блока 5 поступают в блок умножения 12, на второй вход которого поступает с датчика 8 значение скорости vо в виде уставки, а выход него связан с блоком деления 15. Делимое Dт(tм) на блок 15 формируется с дальномерного канала радиолокационной станции ПРЛС-3 через схему совпадения И-7, где происходит присвоение значений Dт(tм) в памяти блока. Выход блока деления 15 связан с блоком 16 выделения дробных величин, указанного выше. Сигналы последнего поступают на блок умножения 17, на второй вход которого поступают сигналы с блока 12 умножения, формирующего величину vоTср. Выход блока умножения 17 связан с общим сумматором 14. На него же подаются сигналы текущей дальности до ЛА, сформированной на основе дальномерного канала ПРЛС-3. Это посадочная радиолокационная станция, работающая в миллиметровом диапазоне волн, строится по принципу одноканального следящего радиолокатора с коническим сканированием луча антенны, создающим в пространстве равносигнальную зону.
Выход блока 7, определяющего дальность в момент максимального положения палубы Dт (tм), также подается на сумматор 14.
В целом вычислитель 10 внутренне и функционально связан с блоком 11 обновления начальных данных и включения решения, что требует цифрового (цифроаналогового) выполнения блока.
Управляющий сигнал ΔDрт с сумматора 14 поступает на корабельную линию передачи сигналов управления ЛПСУ 18 и далее по радиосвязи - в бортовую ЛПСУ 19, связанную с вычислителем 21 сигналов управления по дальности и САУ 20. В вычислителе 21 формируется сигнал управления автоматом тяги в виде алгоритма
ΔDрт.упр = ΔDрт(id+μd(Tp/(Tp+1))),
где id, μd - коэффициенты, устанавливаемые на усилителях 22, 23, с помощью делителей напряжений, изодромного фильтра 24 с передаточной функцией W(p) = Tр / (Tр + 1), где T - постоянная времени, и далее производится сложение на сумматоре 25. Сигналы с выхода вычислителя 21 (с сумматора 25) поступают на автомат тяги 27 и на директорный прибор 28 для отработки этих сигналов летчиком 30 в полуавтоматическом режиме управления. Автомат тяги 27 обеспечивает управление ЛА по дальности ΔDрт и, кроме того, управление по воздушной скорости - углу атаки α. Для этого из САУ 20 в сумматор 26 поступают сигналы (обобщенно) α, Δvт, δв [3].
Полный алгоритм реализует в виде
где  Tф - передаточные числа и постоянная времени;
Tф - передаточные числа и постоянная времени;
vзад - в момент включения корректора скорости;
Δ vт = vзад - vт, vт - текущая скорость.
Сигнал по углу атаки учитывает изменение тяги ΔR для компенсирования угла наклона траектории полета θ, сохранения постоянства воздушной скорости при изменении лобового сопротивления от изменения угла атаки α. Член угла отклонения руля высоты δв обеспечивает изменение тяги ΔR, пропорционально отклонению летчиком ручки управления в продольном канале для компенсации аэродинамического запаздывания между командным сигналом летчика и изменением угла атаки при прохождении воздушной ямы за кораблем.
Сервопривод автомата тяги 27 или летчик воздействуют на рукоятку управления двигателем РУД, на сумматор 31 - муфту пересиливания для управления тягой двигателя 32.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1991 |
|
SU1798988A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1990 |
|
SU1797242A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
Использование: в системах автоматического управления посадкой на палубу корабля. Сущность изобретения: система управления скоростью летательного аппарата (ЛА) при посадке на палубу корабля обеспечивает касание ЛА палубы в тот момент, когда она будет находиться в точке с максимальным отклонением над уровнем моря. Достигается это тем, что система содержит палубное оборудование, состоящее из датчика перемещения палубы, дальномерного канала посадочной радиолокационной станции, блока единого времени, блока выделения временного положения среднего периода качки, счетчика импульса качки, вычислитель разности текущей дальности до ЛА и дальности до расчетного положения ЛА на глиссаде, задатчика уставки скорости vo и линии передачи сигналов управления на корабле, и бортовое оборудование, состоящее из системы автоматического управления, включающей информационные датчики линейного и углового положения, автомат тяги, сервопривод, директорный прибор и вычислитель сигналов управления по дальности. 2 з.п.ф-лы, 4 ил.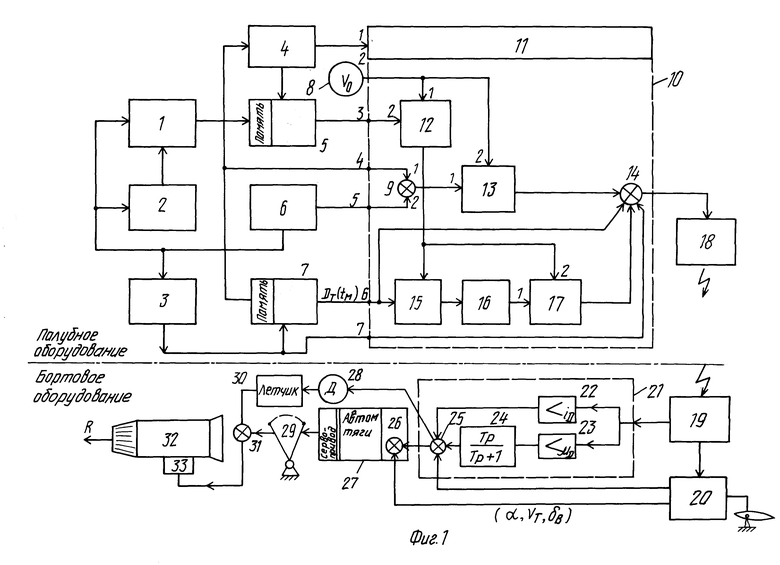
| Павленко В.Ф | |||
| Корабельные самолеты | |||
| - М.: Военное издательство, 1990, с.260. |
