Изобретение относится к гироскопии и может быть использовано в системах инерциального управления подвижных объектов.
Известен способ измерения температуры вращающихся элементов гироскопов, заключающийся в измерении сигналов, пропорциональных температуре отдельных элементов, и определении по ним температурного состояния гироскопа.
Недостатком известного способа является низкая точность измерения температуры вращающихся элементов (ротора) и отсутствие выработки интегральной оценки температуры по объему вращающихся элементов.
Целью настоящего изобретения является повышение точности измерения температуры путем выработки ее интегрального значения.
Поставленная цель достигается тем, что в известном способе измерения температуры вращающихся элементов гироскопа дополнительно возбуждают автоколебания ротора гироскопа, измеряют частоту этих автоколебаний и приводной скорости вращения ротора, а значение температуры определяют по формуле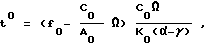
где
to - интегральное по объему ротора значение температуры;
f0 - частота измеренных автоколебаний;
K0, C0, A0 - коэффициент упругости торсионов, полярный и экваториальный моменты инерции ротора при нулевой температуре соответственно;
Ω - скорость вращения ротора;
α - температурный коэффициент линейного расширения ротора и торсионов;
γ - температурный коэффициент модуля упругости торсионов.
Сущность изобретения заключается в следующем.
Собственная частота fa автоколебаний ротора имеет вид
где
H = (Jx + Jyk)Ω = CΩ;
A = Jy + 1/2 Jyк;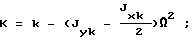
Z = C/A;
Jx, Jy - полярный и экваториальный моменты инерции наружного кольца;
Jxк, Jyк - полярный и экваториальный моменты инерции внутреннего кольца;
k -коэффициент упругости торсионов ротора;
Ω - - скорость вращения ротора.
С учетом температуры to ротора его параметры примут вид
C = C0(1 + αto)2 ≈ C0(1 + 2αto) ;
A = A0(1 + αto)2 ≈ A0(1 + 2αto) ;

k ≈ K0(1 + 3αto - γto) ;

где C0, A0,  K0,
K0,  - соответствующие параметры при нулевой температуре.
- соответствующие параметры при нулевой температуре.
Подставляя (2) в (1), получаем:
С точностью до малых второго порядка относительно αto выражение (3) примет вид:
Поскольку для гироскопа обеспечивается условие динамической настройки:
то из (4) получаем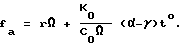
Тогда
где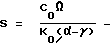 коэффициент пропорциональности;
коэффициент пропорциональности;
Δ = fa - rΩ - разность сравниваемых частот.
Таким образом, измеряемое значение температуры вращающегося ротора пропорционально разности сравниваемых частот Δ с коэффициентом пропорциональности S.
В результате определение температуры ротора, состоящего из колец и торсионов, производят без каких-либо термодатчиков, поскольку сам ротор выполняет функцию термодатчиков. Показания температуры передается на основание гироскопа бесконтактно. Измерение температуры производят в процессе обычной работы гироскопа в качестве чувствительного элемента инерциальных систем. Точность измерения повышается за счет низкого уровня помех на частоте fa.
Изобретение относится к годроскопии и может быть использовано в системах инерциального управления подвижных объектов. Цель изобретения - повышение точности измерения температуры. В способе возбуждают автоколебания ротора гидроскопа, измеряют частоту этих автоколебаний и частоту вращения скорости ротора гидроскопа, а значение температуры вращающихся элементов гидроскопа определяют по разности измеренных частот.
Способ измерения температуры вращающихся элементов роторного вибрационного гироскопа, заключающийся в измерении сигналов, пропорциональных температуре отдельных элементов, и определении по ним температурного состояния гироскопа, отличающийся тем, что, с целью повышения точности измерения температуры путем выработки ее интегрального значения, возбуждают автоколебания ротора гироскопа, измеряют частоту этих автоколебаний и приводной скорости вращения ротора гироскопа, а значение температуры определяют по формуле
где t0 - интегральное по объему ротора значение температуры;
f0 - частота измеренных автоколебаний;
K0, C0, A0 - коэффициент упругости торсионов, полярный и экваториальный моменты инерции ротора при нулевой температуре соответственно;
Ω - скорость вращения ротора;
α - температурный коэффициент линейного расширения ротора и торсионов;
γ - температурный коэффициент модуля упругости торсионов.
| Гидродвигатели / Под ред | |||
| И.Н.Орлова | |||
| -М.: Машиностроение, 1983, с | |||
| Горный компас | 0 |
|
SU81A1 |
