Изобретение относится к гироскопии и может быть использовано в системах инерциальной навигации объектов.
Известно принятое за прототип моментное устройство, содержащее электромагнитный датчик момента с двумя полуобмотками и управляемый источник напряжения.
Недостатком известного устройства является появление неконтролируемой постоянной составляющей знакопеременного момента, что приводит к дрейфу гироскопа в инерциальном пространстве.
Целью настоящего изобретения является устранение указанного недостатка и тем самым существенное повышение точности задания знакопеременного момента.
Поставленная цель достигается введением двух диодов, двух фазовых дискриминаторов и блока разности сигналов, а также схемы их соединения.
Сущность изобретения заключается в следующем.
Выходной сигнал реальных генераторов переменного тока вследствие нелинейных искажений имеет отклонения формы от идеального гармонического сигнала, имеющего заданную частоту, соответственно знакопеременный момент имеет нелинейные искажения. В результате управления гироскопическим устройством с помощью такого момента к ротору гироскопа прикладывается квазипостоянный возмущающий момент, изменяющийся по случайному закону, что приводит к уходам гироскопа в инерциальном пространстве.
Предлагаемое устройство обеспечивает измерение средневыпрямленного значения момента, создаваемого каждой обмоткой датчика момента (ДМ), путем определения средневыпрямленного значения тока в соответствующей обмотке, определение интегральной величины знакопеременного момента путем определения разности средневыпрямленных значений тока в обмотках, обнулению измеренной интегральной величины смещением среднего уровня тока в обмотках ДМ.
В результате обнуляется прикладываемый к ротору медленно меняющийся возмущающий момент, что существенно повышает точность задания знакопеременного момента.
На чертеже представлена схема предлагаемого устройства, где: 1 - генератор переменного тока, 2, 3 - диоды, 4,5 - обмотки датчика момента, 6 - ротор гироскопа, 7, 8 - фазовые дискриминаторы, 9 - блок разности сигналов.
Выход генератора переменного тока (ГПТ) 1 с помощью двух противоположных диодов 2, 3 подключен соответственно к входам обмоток 4,5 ДМ. Входы обмоток ДМ подключены к первым входам фазовых дискриминаторов (ДМ) 7,8, вторые входы которых соединены с выходом ГПТ, а выходы ФД через блок разности сигналов 9 соединены и управляющим входом ГПТ.
Ротор 6 гироскопа приведен во вращение с постоянной скоростью Ω от двигателя, не показанного на чертеже. Переменный ток частоты ν с выхода ГПТ 1 поступает через диод 2 на обмотку 4 ДМ и через диод 3 на обмотку 5 ДМ, а также на вторые выходы ФД 7,8. Поскольку обмотки ДМ подключены к выходу ГПТ через противоположно включенные диоды, то соответственно проводимости диодов каждая обмотка ДМ подключена к выходу ГПТ в течение полупериода переменного тока. В результате поочередного протекания тока через обмотки 4, 5 к ротору 6 прикладывается знакопеременный момент, обуславливая колебания ротора с частотой ν вокруг центра подвеса 0.
Токи, протекающие в обмотках 4 и 5, поступают на первые входы ФД 7 и 8, на вторые входы которых подан выходной ток ГПТ. ФД производят фазочувствительное перемножение входных сигналов и выделение среднего значения произведения. В результате на выходах ФД 7,8 получают токи i1, i2, равные средневыпрямленным значениям токов в обмотках 4 и 5 соответственно. При отсутствии нелинейных искажений в моментах М1 и М2, создаваемых протеканием токов в обмотках 4 и 5 соответственно, токи на выходах ФД равны i1=i2, поэтому выходной сигнал блока разности сигналов 9 равен нулю.
Наличие нелинейных искажений в моментах М1 и М2 обнаруживается по неравенству токов i1 и i2 и соответственно по возникновению на выходе блока 9 разностного сигнала, пропорционального интегральной величине знакопеременного момента. Разностный сигнал поступает на управляющий вход ГПТ. В результате ГПТ смещает средний уровень выходного тока, смещая средний уровень момента ДМ, до обеспечения равенства (1) и тем самым до обнуления интегральной величины знакопеременного момента.
Условие (1) поддерживается автоматически не только при наличии нелинейных искажений тока ГПТ, но и при разнообразных изменениях параметров гироскопа (неравномерный нагрев обмоток 4 и 5 и изменение их сопротивления, изменения параметров диодов и т.п.) в реальных условиях эксплуатации.
Поскольку равенство (1) поддерживается автоматически, то средний уровень момента, прикладываемого к колеблющемуся с частотой ν ротору, равен нулю, что и обуславливает отсутствие уходов гироскопа вкруг входных осей, перпендикулярных вектору  .
.
Использование: в гиросконии, в системах инерциальной навигации объектов. Сущность изобретения: с целью повышения точности задания знакопеременного момента в моментном устройстве, содержащем электромагнитный датчик момента с двумя полуобмотками и управляемый источник напряжения, обеспечено определение интегральной величины знакопеременного момента, приложенного к ротору, и обнуление измеренной величины смещением среднего уровня момента, для чего в него введены два диода, два фазовых дискриминатора и блок разности сигналов. 1 ил.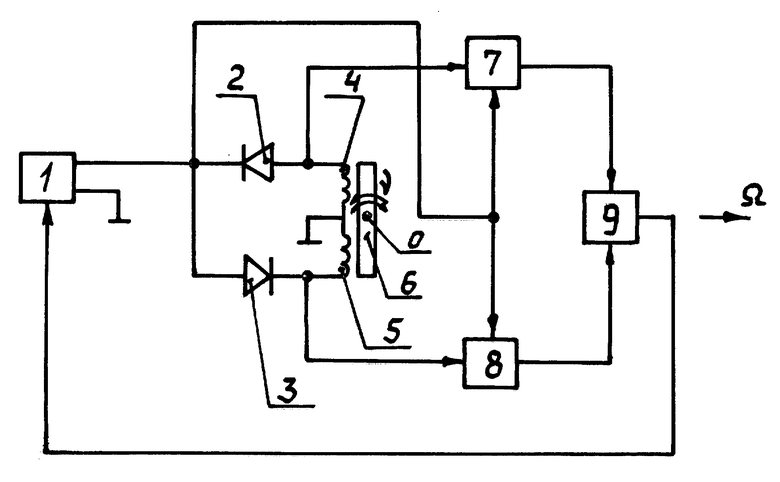
Моментное устройство для гироскопа, содержащее электромагнитный датчик момента с двумя полуобмотками и управляемый источник напряжения, отличающееся тем, что, с целью повышения точности задания знакопеременного момента, введены два диода, два фазовых дискриминатора и блок разности сигналов, причем источник напряжения подключен к полуобмоткам через противоположно включенные диоды и к опорным входам двух фазовых дискриминаторов, другие входы которых подключены к точкам соединения полуобмоток и диодов, а выходы - к блоку разности сигналов, который подключен к управляющему входу источника напряжения.
| Дрейпер Ч.С | |||
| и др | |||
| Навигация, наведение и стабилизация в космосе | |||
| - М.: Машиностроение, 1970, с.204-208. |
