Предлагаемое изобретение относится к гироскопической технике и предназначено для повышения точности динамически настраиваемого гироскопа в условиях эксплуатации баллистических ракет.
В литературе такой прибор известен под названием "гироскоп Хоува".
Ротор гироскопа связан с приводным валом посредством карданова кольца и двух пар торсионов. При определенной скорости вращения приводного вала динамические силы инерции, развиваемые кардановым кольцом, уравновешивают упругий момент торсионов, и гироскоп, в первом приближении, становится свободным.
Предлагаемое изобретение решает вопрос отстройки динамически настраиваемого гироскопа от угловой вибрации. Сущность изобретения поясняется чертежами, где
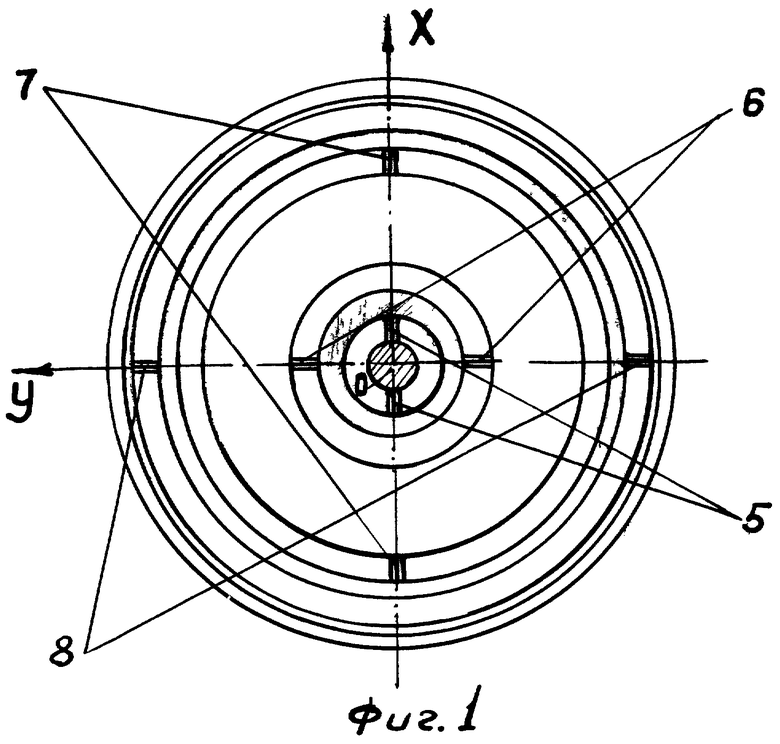
на фиг.1 дан вид чувствительного элемента (ЧЭ) гироскопа в направлении оси вала привода;
на фиг.2 - вид ЧЭ в направлении, перпендикулярном оси вала привода.
ЧЭ гироскопа представляет собой симметричный ротор 1, связанный с приводным валом 2 посредством кардановых колец 3, 4 и четырех пар торсионов 5, 6, 7, 8. Внутреннее карданово кольцо 3 крепится парой соосно расположенных торсионов 5 к приводному валу и другой парой торсионов 6 к ротору. Наружное карданово кольцо 4 крепится парой соосно расположенных торсионов 7 к ротору и другой парой торсионов 8 к приводному валу. Оси торсионов 5 и 8, связывающих кардановы кольца с валом привода, а также оси торсионов 6 и 7, связывающих эти кольца с ротором, развернуты в плоскости вращения ротора на угол 90° по отношению друг к другу. В местах крепления осуществляется жесткая связь торсионов с ротором, кольцами и валом привода. Оси торсионов ОХ и OY совпадают с главными экваториальными осями инерции колец и ротора.
Торсионы 5 и 7 имеют малую угловую жесткость относительно оси ОХ и бесконечно большую - относительно осей, перпендикулярных ОХ; торсионы 6 и 8 имеют малую угловую жесткость относительно оси OY и бесконечно большую - относительно осей, перпендикулярных OY.
Такая конструкция подвеса обеспечивает возможность поворота ротора вместе с внутренним кардановым кольцом относительно оси ОХ и вместе с наружным кольцом - относительно оси OY, и ограничивает свободу линейных перемещений в любых направлениях.
Устройство работает следующим образом. Двигатель гироскопа вращает приводной вал с угловой скоростью Ω относительно оси OZ. Вращение от приводного вала передается через торсионы кольцам и ротору. При отклонениях приводного вала относительно осей OX и OY на углы "α" и "β" соответственно на ротор относительно указанных осей передаются моменты Мх и Mу, величина которых с точностью до малых слагаемых первого порядка определяется уравнениями:
где a1, b1 - осевой и экваториальный моменты инерции соответственно внутреннего карданова кольца;
a2, b2 - осевой и экваториальный моменты инерции соответственно наружного карданова кольца;
к1, к3 - угловая жесткость пары торсионов 5 и 7 соответственно относительно оси ОХ;
к2, к4 - угловая жесткость пары торсионов 6 и 8 соответственно относительно оси OY.
Путем преобразований [4]:
получим вместо системы уравнений (1) одно уравнение в комплексной форме, характеризующее момент, действующий на ротор гироскопа в неподвижной системе координат:

где 

Приближенным условием настройки системы в резонанс (без учета влияния моментов инерции ротора) является выполнение равенства:
 или
или

Из выражения (2) видно, что наиболее опасной является угловая вибрация с частотой "2 Ω", которая может привести и возникновению постоянных уводящих моментов.
Оценку влияния угловой вибрации с частотой "2 Ω" на рассматриваемую систему можно произвести, задавая изменение угла "θ" в уравнении (2) по закону:
θ=δе2i Ωt, где
δ - амплитуда угловой вибрации.
Уравнение (2) с учетом подстановки в него "θ", сопряженной величины  и их производных имеет вид:
и их производных имеет вид:

На ротор гироскопа, таким образом, со стороны подвеса передается постоянный момент:
 или
или

Отстройка от угловой вибрации происходит при выполнении равенства:

которое не противоречит выполнению равенства (3) и, в частном случае, выполняется при условии:
Изобретение относится к гироскопической технике и предназначено для повышения точности динамически настраиваемого гироскопа в условиях эксплуатации баллистических ракет. Сущность: гироскоп содержит ротор, приводной вал, карданово кольцо и две пары торсионов, связывающих карданово кольцо с приводным валом и ротором. Кроме того, он содержит дополнительное карданово кольцо, соединенное с ротором и приводным валом двумя парами дополнительных торсионов. При этом оси торсионов, связывающие кардановы кольца с валом привода, а также оси торсионов, связывающие кардановы кольца с ротором, расположены в плоскости вращения и взаимно перпендикулярны. Технический результат: повышение точности гироскопа при действии угловых вибраций. 2 ил.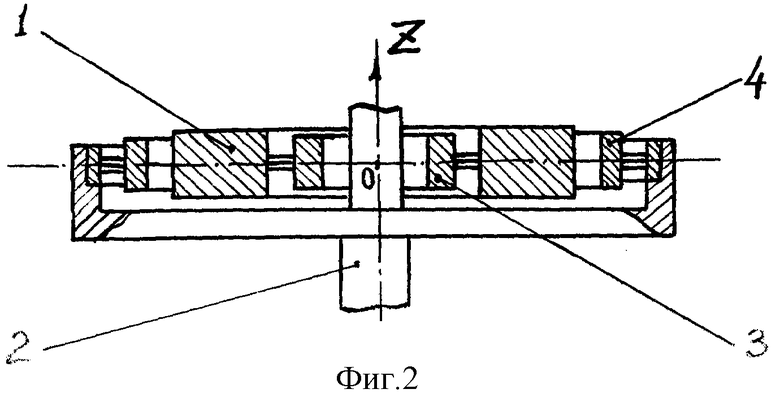
Динамически настраиваемый гироскоп, содержащий ротор, приводной вал, карданово кольцо и две пары торсионов, связывающих карданово кольцо с приводным валом и ротором, отличающийся тем, что, с целью повышения точности гироскопа при действии угловых вибраций, в него введено дополнительное карданово кольцо, соединенное с ротором и приводным валом двумя парами дополнительных торсионов, причем оси торсионов, связывающих кардановы кольца с валом привода, а также оси торсионов, связывающих кардановы кольца с ротором, расположены в плоскости вращения и взаимно перпендикулярны.

