Изобретение относится к волочильному производству, а именно к конструкциям приводов для перемещения кареток волочильных станов непрерывного действия.
Известен кулачковый привод непрерывного волочильного стена (Еремеев В.К. Состояние и перспективы совершенствования волочильного оборудования прямолинейного действия, журнал "Тяжелое машиностроение", N 2, 1992, стр. 4 - 6), выполненный в виде двух цилиндрических кулаков, размещенных на одном валу и развернутых друг относительно друга на 180o. Цилиндрические кулаки кинематически связаны с волочильными каретками. Профиль кулаков выполнен таким образом, что обеспечивается постоянство волочильных кареток во время волочения.
Недостатком известного кулачкового привода является значительная величина ускорения кареток на переходных участках (между рабочим и обратным ходами кареток).
Наиболее близким к предлагаемому является кулачковый привод непрерывного волочильного стана фирмы "Шумаг" Конструкции непрерывных волочильных станов в СССР и за рубежом, авт. Баранов Г.Л., Еремеев В.К., Металлургическое оборудование, М. , ЦНИИТЭИтяжмаш, 1983, N 30, стр. 9 - 12), выполненный в виде двух цилиндрический кулаков, размещенных на одном валу и развернутых друг относительно друга на 180o и кинематически связанных с каретками волочильного стана, при этом профиль цилиндрических кулаков выполнен в соответствии с функциональной зависимостью перемещения волочильной каретки (S) от угла поворота (ϕ), обеспечивающей постоянную скорость волочильных кареток в направлении волочения и включающей участок установившегося рабочего хода Sp, участок обратного (холостого) хода Sx и участки неустановившегося хода S1, S2 и S3.
Участки неустановившегося хода каретки (S1, S2, S3) выполнены по дугам окружностей, что обеспечивает плавный разгон и торможение кареток при изменении направления их движения.
Недостатком известного кулачкового привода является значительная величина ускорения каретки на переходных участках неустановившегося хода каретки S1, S2 и S3. Величина ускорения кареток при профилировании переходных участков радиусом r определяется по формуле:
где ω - - угловая скорость вращения кулака;
D - наружный диаметр кулака;
α - - текущий угол подъема профиля кулака.
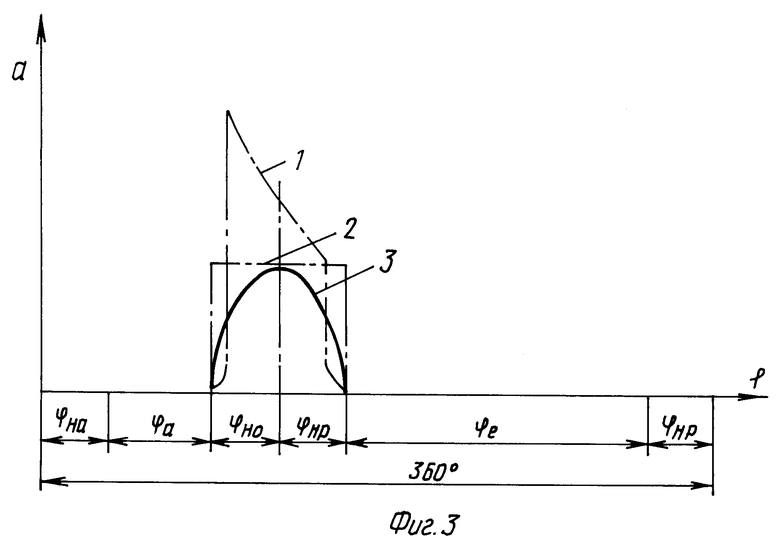
При принятых на практике диаметрах кулака и массе каретки, а также длины переходных участков, величина инерционных сил торможения и разгона на участке S2 становится соизмеримой с усилием волочения при скорости волочения порядка 1,2 м/с. Кроме того, график ускорения (фиг. 3, кривая 1) имеет ярко выраженные пики, которые неизбежно приводят к "мягким ударам" в местах контакта роликов каретки и кулака. Таким образом, реально допустимая скорость волочения в принятых практикой ограничениях по диаметру кулака и массе каретки составляет 0,6 - 0,9 м/с. Уменьшить ускорение возможно за счет (в основном) увеличения радиуса профилирования "r", но тогда неизбежно уменьшается длина участков Sp и Sx, что приводит к снижению производительности стана и неизбежно увеличивается угол подъема α , который также имеет жесткие ограничения по допускаемому давлению роликов каретки на кулак и условию заклинивания каретки в направляющих стана при возврате. Практически оптимальные значения угла α на участке Sp составляют 20 - 25o, а на участке Sx 38 - 43o.
Известно также выполнение участков неустановившегося хода каретки S1, S2 и S3 развертки профиля кулака непрерывного волочильного стана фирмы "Шумаг" по квадратичной параболе, что обеспечивает постоянную величину ускорения на переходных участках, причем при прочих равных параметрах величина ускорения значительно меньше, чем при профилировании по радиусу. Величина ускорения может быть определена по формуле:
где V - скорость волочения;
π - - постоянная длина окружности;
K = Vx/V - отношение скорости возврата к скорости волочения каретки в установившемся процессе;
m - отношение угла поворота кулака приходящегося на холостой и рабочий ход каретки.
Однако и здесь при общем уменьшении величины ускорения график ускорения имеет ярко выраженные пики в начале и в конце переходного участка (фиг. 3, кривая 2), что уже неизбежно приводит к "мягким" ударам на контактных поверхностях каретки с кулаком. При скоростях волочения порядка 1,5 м/с в принятых выше ограничениях сила инерции при торможении и разгоне каретки соизмерима с усилием волочения. В данном случае снижение величины ускорения возможно в основном только за счет увеличения наружного диаметра кулака, что далеко не всегда возможно в реальных условиях.
В предлагаемой конструкции кулачкового привода непрерывного волочильного стана выполнение профиля кулака в соответствии с функциональной зависимостью перемещения каретки от изменения угла поворота кулака, описываемой предлагаемой системой уравнений, позволяет уменьшить силовое нагружение элементов стана, воспринимающих нагрузки, связанные с инерцией волочильных кареток при заданной массе и длине участков их разгона-торможения и исключить "мягкие" удары.
Исключение динамических ударов при переменном ускорении каретки возможно при условии, что в переходных точках профиля кулака величины ускорений слева и справа по графику будут равны.
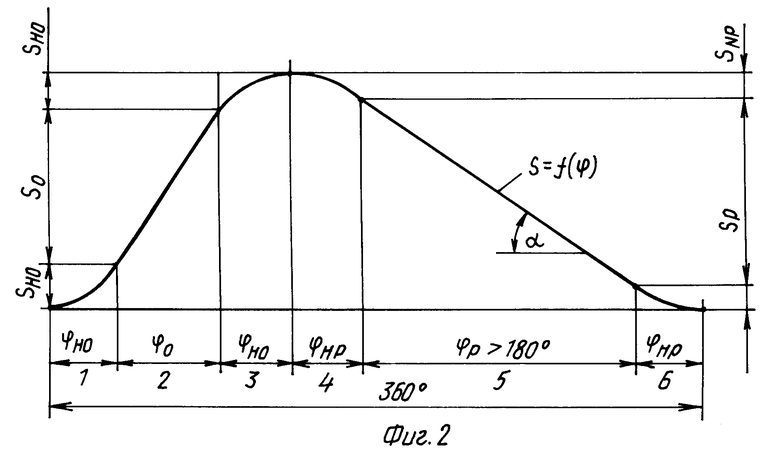
Изобретение поясняется чертежами: на фиг. 1 изображен кулачковый привод непрерывного волочильного стана; на фиг. 2 - развертка профиля кулачка или график перемещения каретки (S) от угла поворота (ϕ) ; на фиг. 3 - график ускорения кареток, выполненный для участков 3 - 4 зависимости (фиг. 2) для профиля кулака, в котором переходные участки спрофилированы дугами окружностей (кривая 1), квадратичной параболой (кривая 2) и по предмету изобретения (кривая 3) при равных длинах переходных участков и одинаковой угловой скорости вращения кулака.
Кулачковый привод непрерывного волочильного стана содержит два цилиндрических кулака 1, размещенных на одном приводном валу 2 и развернутых друг относительно друга на 180o. Цилиндрические кулаки 1 кинематически связаны с каретками 3 волочильного стана. Обрабатываемое изделие 4 протягивается через волоку 5.
На фиг. 2 показан график перемещения каретки S от угла поворота кулака ϕ (или развертка теоретического профиля кулака). На графике выделены участки:
Sp и ϕр - перемещение каретки и угол поворота кулака - участок 5 на участке волочения с постоянной скоростью;
Sнр и ϕнр - два участка неустановившегося рабочего хода - участки 4 и 6 перемещения каретки в направлении волочения;
S0 и ϕo - перемещение каретки и угол поворота кулака - участок 2 на участке возврата каретки к волоке;
Sно и ϕно - два участка неустоявшегося холостого хода - участки 1 и 2 каретки в направлении возврата;
α - текущий угол подъема профиля кулака.
Кулачковый привод волочильного стана работает следующим образом.
При вращении вала 2 с кулаками 1, каретки 3 попеременно "перехватывают" изделие 4 и выполняют процесс его протяжки через волоку 5. Кулаки развернуты относительно друг друга на 180o. Длина участка рабочего хода 5 больше 180o и следовательно каретки определенную часть пути в направлении волочения выполняют с одинаковой скоростью и в это время происходит перехват изделия.
Переходные участки профиля кулака выполнены таким образом, что во всех переходных точках профиля ускорения каретки слева и справа по графику перемещения равны между собой, чем обеспечивается отсутствие "мягких" ударов, а траектория профиля в целом обеспечивает минимальные значения ускорений при заданных длинах участков и соответственно минимальные инерционные силы от кареток при заданной их массе.
Поставленная цель достигается тем, что в уравнениях кривой профиля кулака в переходных участках неустановившегося движения ускорения кареток равны между собой, т.е. в переходной "мертвой" точке участков 3 и 4
a3 = a4 или 
при ϕ = 2ϕно - ϕo
и в переходной "мертвой" точке участков 1 и 6
a1 = a6 или 
при ϕ = 0o; ϕ = 360o
Отсутствие "мягких" ударов в точках перехода с неустоявшегося движения (с переменным ускорением) на установившееся движение (с постоянной скоростью) в уравнениях кривой профиля кулака скорости перемещения равны между собой, т.е.
в переходной точке участков 1 - 2 при ϕ = ϕно
при ϕ = ϕно
в переходной точке участков 2 - 3 при ϕ = ϕно + ϕo
при ϕ = ϕно + ϕo
в переходной точке участков 4 - 5 при ϕ = ϕно + ϕо + ϕнр
при ϕ = ϕно + ϕо + ϕнр
в переходной точке участков 5 - 6 при ϕ = ϕно + ϕo + ϕнр + ϕр.
при ϕ = ϕно + ϕo + ϕнр + ϕр.
Поставленная цель достигнута тем, что с точностью до 5% относительной погрешности зависимости S = f(ϕ) описывается системой следующих уравнений:
Участок 1:
при o = ϕ = ϕно
Участок 2:
при ϕно = ϕ = ϕно + ϕo
Участок 3:
при ϕно + ϕo = ϕ = 2ϕно + ϕo
Участок 4:
при 2ϕно+ ϕo = ϕ = 2ϕно+ ϕo+ ϕнр
Участок 5:
при 2ϕно+ ϕo+ ϕнр = ϕ = 2ϕно+ ϕo+ ϕнр+ ϕр
Участок 6:
при 2ϕно+ ϕo+ ϕнр+ ϕр = ϕ = 2ϕно+ ϕo+ 2ϕнр+ ϕр
в которой параметры участков удовлетворяют системе зависимостей
при o = ϕ = ϕно
При профилировании тягового цилиндрического кулака в соответствии с предлагаемой зависимостью на протяжении всего периода разгона-торможения ускорение каретки изменяется постепенно (без динамических ударов), причем с увеличением угла давления кулака модуль ускорения каретки уменьшается, в результате чего сила взаимодействия каретки с кулаком остается примерно постоянной, обеспечивая наивысшую допустимую скорость волочения при заданной массе каретки и длине участков разгона-торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕПРЕРЫВНЫЙ ВОЛОЧИЛЬНЫЙ СТАН | 1997 |
|
RU2146570C1 |
| ТЯГОВОЕ УСТРОЙСТВО ВОЛОЧИЛЬНОГО СТАНА | 1992 |
|
RU2063280C1 |
| ЛЕТУЧАЯ ПИЛА ДЛЯ РЕЗКИ ДВИЖУЩЕГОСЯ ПРОКАТА | 1997 |
|
RU2167747C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| МЕХАНИЗМ ПОДАЧИ И ПОВОРОТА СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1999 |
|
RU2207202C2 |
| УПОРНО-РЕГУЛИРОВОЧНЫЙ МЕХАНИЗМ СТАНА ВИНТОВОЙ ПРОКАТКИ | 1995 |
|
RU2103081C1 |
| СПОСОБ ПРОКАТКИ ТРУБ НА РЕДУКЦИОННО-РАСТЯЖНОМ СТАНЕ | 2013 |
|
RU2532610C1 |
| УПОРНО-РЕГУЛИРОВОЧНЫЙ МЕХАНИЗМ СТАНА ВИНТОВОЙ ПРОКАТКИ | 1999 |
|
RU2172220C2 |
| ЛИТЕЙНО-ПРОКАТНЫЙ АГРЕГАТ | 2001 |
|
RU2224606C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОКРАТНЫМ ПРЯМОТОЧНЫМ ВОЛОЧИЛЬНЫМ СТАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111807C1 |
Изобретение относится к волочильному производству, а именно к конструкциям приводов для перемещения кареток волочильных станов непрерывного действия. Кулачковый привод непрерывного волочильного стана выполнен в виде двух цилиндрических кулачков, размещенных на одном валу и развернутых друг относительно друга на 180o, кинематически связанных с каретками волочильного станка. Профиль цилиндрических кулачков выполнен в соответствии с функциональной зависимостью перемещения волочильной каретки S от угла поворота ϕ кулачка, обеспечивающей постоянную скорость волочильных кареток в направлении волочения и включающей участок установившегося рабочего хода каретки Sр, ϕp , участок установившегося обратного хода Sо, ϕo , два участка неустановившегося обратного хода Sно, ϕно . Для уменьшения силового нагружения элементов стана, воспринимающих нагрузки, связанные с инерцией волочильных кареток при заданной массе и длине участков их разгона - торможения и исключения "мягких ударов", профиль кулачка выполнен таким образом, что функциональная зависимость перемещения каретки от изменения угла поворота кулачка описывается регламентированной системой уравнений. 3 ил.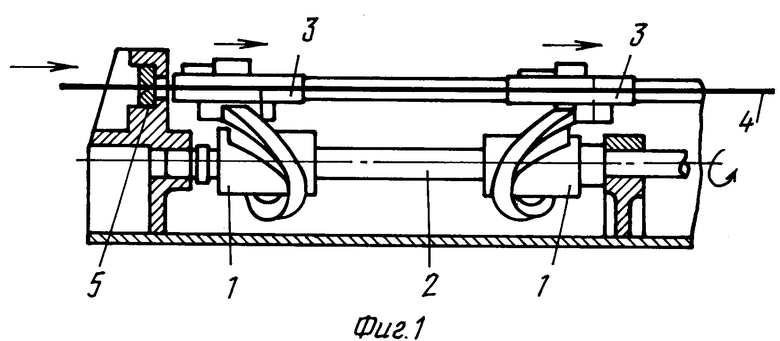
Кулачковый привод непрерывного волочильного стана, выполненный в виде двух цилиндрических кулаков, размещенных на одном валу и развернутых друг относительно друга на 180o, кинематически связанных с каретками волочильного стана, при этом профиль цилиндрических кулаков выполнен в соответствии с функциональной зависимостью перемещения волочильной каретки /S/ от угла поворота / ϕ / кулака, обеспечивающей постоянную скорость волочильных кареток в направлении волочения и включающей участок установившегося рабочего хода каретки /Sp, ϕp /, участок установившегося обратного хода (S0, ϕo ) два участка неустановившегося рабочего хода (Sнр, ϕнр ) и два участка неустановившегося обратного хода /Sно, ϕно /, отличающийся тем, что профиль кулака выполняется таким образом, что функциональная зависимость перемещения каретки с изменением угла поворота кулака описывается системой следующих уравнений:
при O=ϕ=ϕно
при ϕно=ϕ=ϕно+ϕo
при ϕно+ϕo=ϕ=2ϕно+ϕo
при 2ϕно+ϕo=ϕ=2ϕно+ϕо+ϕнр
при 2ϕно+ϕo+ϕнр=ϕ=2ϕно+ϕo+ϕнр+ϕр
при 2ϕно+ϕo+ϕнр+ϕр=ϕ=2ϕно+ϕo+2ϕнр+ϕр
в которой параметры участков удовлетворяют системе зависимостей:
 \
\
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Еремеев И.К | |||
| Состояние и перспективы совершенствования волочильного оборудования прямолинейного действия | |||
| Ж | |||
| "Тяжелое машиностроение" | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Г.Л.Баранов, В.К.Еремеев | |||
| Конструкции непрерывных волочильных станов в СССР и за рубежом | |||
| Металлургическое оборудование | |||
| - М.: ЦНИИТЭИтяжмаш, 1983, N30, с.9 - 12. | |||

