Изобретение относится к волочильному производству, а именно к конструкциям непрерывных волочильных станов с кулачковым приводом.
Известен непрерывный волочильный стан с кулачковым приводом ("Состояние и перспективы совершенствования волочильного оборудования прямолинейного действия", В. К. Еремеев, журнал "Тяжелое машиностроение", N 2, 1992 г., с. 4-6), состоящий из станины с доской волок, приводного вала с установленными на нем двумя цилиндрическими кулаками, развернутыми на 180o, и двух волочильных кареток, кинематически связанных с кулаками, через роликовые опоры по оси вращения приводного вала кулаков. Профиль кулаков выполнен таким образом, что обеспечивает постоянство скорости во время волочения, а геометрия гребня профиля кулака обеспечивает постоянство расстояния между рабочим и холостым контактирующими роликами волочильной каретки.
Недостатком известного стана является то, что с увеличением скорости волочения желательно увеличивать угол давления кулака на участке возврата волочильной каретки, что при заданных ограничениях по расстоянию между роликами каретки и их диаметру, определяемых наименьшей возможной массой каретки, толщина гребня профиля кулака на участке возврата становится крайне малой и технологически невыполнимой, а на рабочем участке излишне завышенной. Увеличение же массы, габаритов каретки и кулаков находится в прямом противоречии с задачей по увеличению скорости и соответственно производительности стана.
Наиболее близким к предлагаемому является непрерывный волочильный стан с кулачковым приводом фирмы "Шумаг" ("Конструкции непрерывных волочильных станов в СССР и за рубежом", Баранов Г.Л., Еремеев В.К. "Металлургическое оборудование", М., ЦНИИТЭИТяжмаш, 1983 г., N 30, с. 9-12), выполненный в виде станины с доской волок, приводного вала с установленными на нем двумя цилиндрическими кулаками, развернутыми друг относительно друга на 180o, имеющими гребни рабочего и гребни холостого хода с максимально возможными углами давления α и β на развертке профиля кулака и двух волочильных кареток, кинематически связанных с кулаками через ролики рабочего хода с радиусом R и ролики холостого хода c радиусом r, при этом оси вращения роликов перпендикулярны осям вращения кулаков и расположены по оси вращения кулаков на расстоянии A.
Недостатком известного непрерывного волочильного стана является то, что, как и во всех известных конструкциях пространственных кулачковых механизмов двустороннего действия, ось вращения контактирующих с кулаком роликов совпадает с осью вращения кулака, а это ведет к тому, что с увеличением скорости волочения желательно увеличивать угол давления кулака на участке возврата волочильной каретки, что при заданных ограничениях по расстоянию между роликами каретки и их диаметру, определенных наименьшей возможной массой каретки, толщина гребня профиля кулака на участке возврата становится крайне малой и технологически невыполнимой, а на рабочем участке излишне завышенной.
Изобретательская задача сводится к следующему: найти техническое решение, при котором толщину гребня кулака на рабочем участке можно выполнить только из условия его прочности, а толщину гребня на участке возврата выполнить достаточной для оптимальной механической обработки и получения технологичной литейной заготовки. При этом не увеличивать углы давления на обоих участках и сохранить или даже уменьшить расстояние A между роликоопорами каретки, а также повысить производительность волочильного стана, не увеличивая и даже уменьшая габариты и массу подвижных его частей.
Tехнический результат достигается тем, что в непрерывном волочильном стане, включающем станину с доской волок, приводной вал с установленными на нем двумя цилиндрическими кулаками, развернутыми друг относительно друга на 180o и имеющими гребни толщиной "a" рабочего хода с максимально возможными углами давления α на развертке профиля кулака и гребни холостого хода с максимально возможными углами давления β на развертке профиля кулака, и две волочильные каретки, кинематически связанные с кулаками через ролики рабочего хода с радиусом R и ролики холостого хода с радиусом r, при этом оси вращения роликов рабочего хода и оси вращения роликов холостого хода расположены на расстоянии A, а оси вращения кулаков перпендикулярны осям вращения роликов, ось вращения роликов холостого хода смещена относительно оси вращения кулака на величину X, равную
Изменяя величину X смещения оси вращения роликов холостого хода относительно оси вращения кулака, можно:
1) получить требуемое сочетание толщины гребней кулака a на рабочем и a1 на холостом участках при сохранении расстояния между осями вращения роликов по оси вращения кулаков A и углов подъема профиля кулака на участке рабочего хода α и участке холостого хода β;
2) увеличить угол подъема профиля кулака на участке холостого хода β, не изменяя сочетания толщин гребней кулака на рабочем a и холостом a1 участках и не меняя расстояние A, т.е. возможно увеличение производительности волочильного стана без увеличения массы;
3) уменьшить расстояние A между осями вращения роликов по оси вращения кулаков, не меняя сочетания толщины гребней кулака на рабочем a и холостом a1 участках и углов подъема профиля кулака на участке рабочего хода α и участке холостого хода β, т.е. возможно уменьшение массы волочильного стана.
На чертежах представлено:
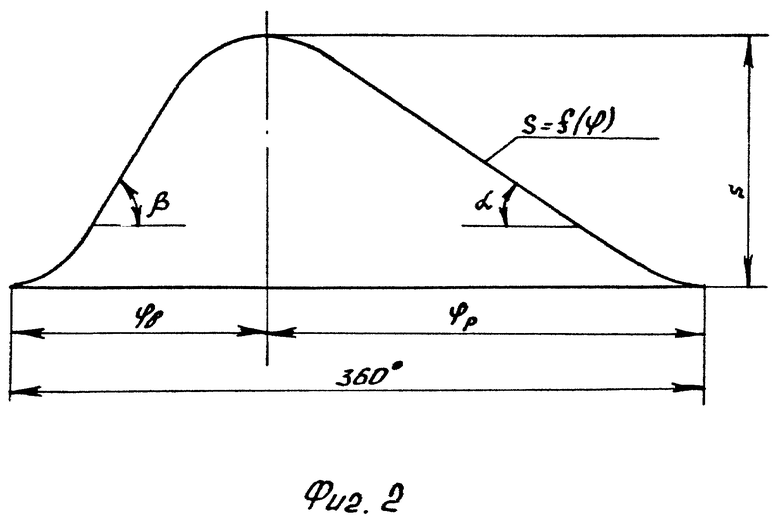
на фиг. 1 - непрерывный волочильный стан с кулачковым приводом;
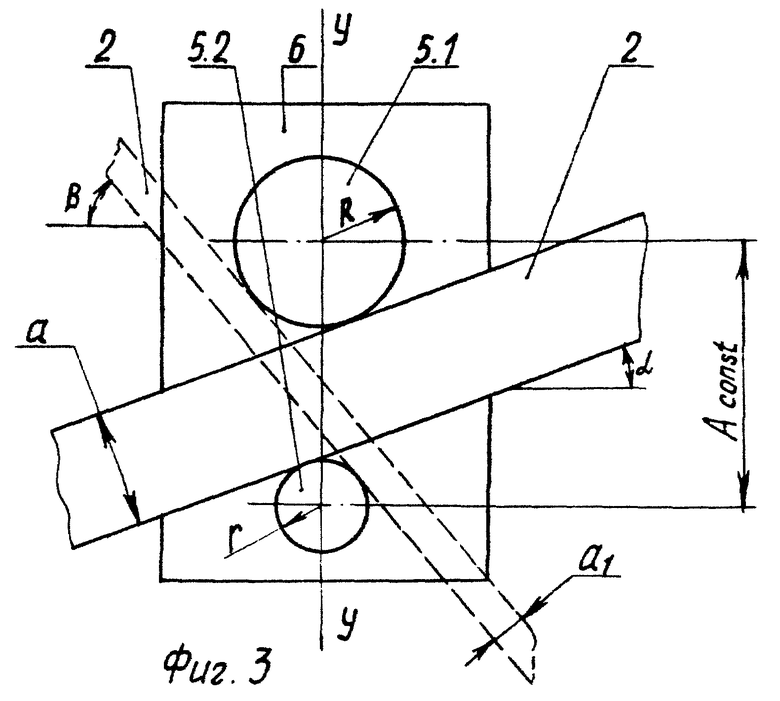
на фиг. 2 - развертка профиля кулачка или график перемещения каретки (Sϕ) от угла поворота (ϕ), где ϕв - участок возврата каретки, а ϕp - участок рабочего хода;
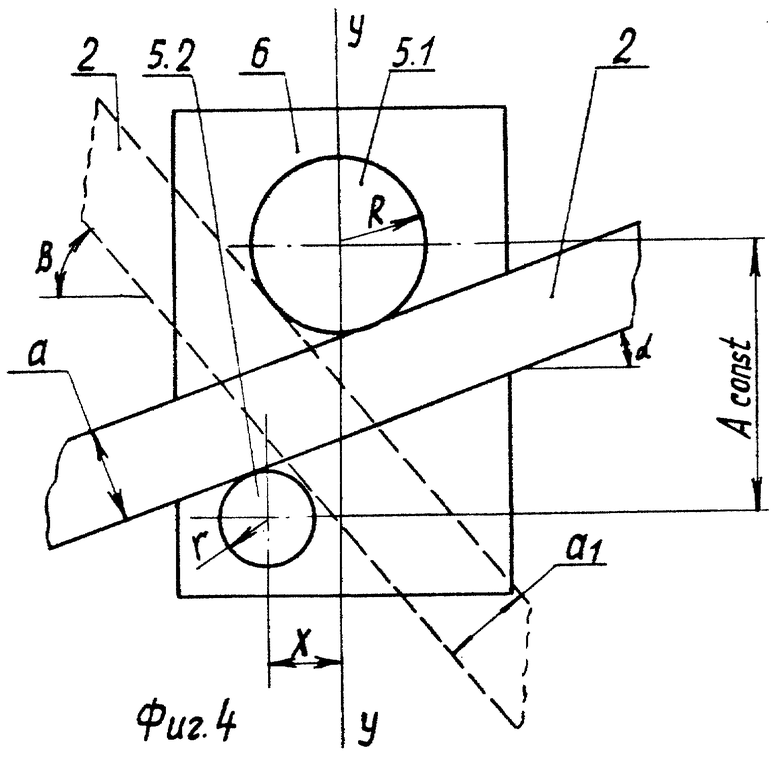
на фиг. 3 - схема взаимодействия роликоопор каретки с гребнем кулака в волочильных станах без смещения оси вращения роликов холостого хода относительно оси вращения кулака;
на фиг. 4 - схема взаимодействия роликоопор каретки с гребнем кулака при смещении оси вращения холостого хода относительно оси вращения кулака.
Непрерывный волочильный стан состоит из станины 1 с доской волок 2, приводного вала 3 с установленными на нем двумя цилиндрическими кулаками 4, развернутыми друг относительно друга на 180o, имеющими гребни толщиной a1 холостого хода и гребни толщиной a рабочего хода. С кулаками 4 контактируют с помощью роликоопор 5.1 и 5.2 волочильные каретки 6. Обрабатываемое изделие обозначено позицией 7.
Волочильный стан работает следующим образом.
При вращении приводного вала 3 с кулаками 4 волочильные каретки 6 попеременно "перехватывают" изделие 7 и выполняют процесс его протяжки через волоку 2. Кулаки 4 развернуты относительно друг друга на 180o. Длина участка рабочего хода ϕp (фиг.2) больше 180o, следовательно, каретки 6 определенную часть пути в направлении волочения выполняют с одинаковой скоростью, в это время происходит перехват изделия и обеспечивается непрерывность процесса волочения. На фиг. 2 видно, что угол подъема профиля кулака α на участке рабочего хода (угол давления между роликоопорой 5 каретки 6 и кулаком 4) всегда меньше угла подъема профиля кулака β на участке холостого хода.
Для увеличения скорости волочения, учитывая время, необходимое на перехват изделия 7 волочильными каретками 6, нужно увеличивать величину ϕp при постоянном угле α, который из практических соображений принимается равным 20-25. Это автоматически приводит к уменьшению участка ϕв и соответственно к увеличению угла β.
В этом случае, как видно из фиг. 3, расстояние между осями роликоопоры 5.1 с радиусом R (несет нагрузку волочения) и роликоопоры 5.2 с радиусом r (служит для возвращения каретки в исходное положение) является постоянным A. При α = 0 и β = 0 A = R + r + a. A определяет габариты каретки 6 и ее массу. Поэтому для увеличения угла β необходимо уменьшать толщину гребня кулака на холостом участке и увеличивать толщину гребня на рабочем. Это возможно в определенных пределах, т.к. связано со сложностью практического выполнения.
Угол β можно увеличивать, увеличивая расстояние между осями вращения кулаков A, но это приводит к увеличению массы волочильной каретки и, следовательно, к ухудшению динамических параметров стана.
Самым лучшим решением задачи увеличения угла β является смещение оси вращения роликов холостого хода относительно оси вращения кулака на величину X.
Величина смещения X получена следующим образом: из условий технологичности изготовления кулаков и условий прочности толщина гребня a1 на участке возврата должна составлять 0,3-0,8 от толщины гребня "a" на рабочем участке. Углы давления α и β и расстояние между осями вращения роликов A не изменяются. Решая эту задачу геометрически, определяем величину смещения X: о
о
| название | год | авторы | номер документа |
|---|---|---|---|
| КУЛАЧКОВЫЙ ПРИВОД НЕПРЕРЫВНОГО ВОЛОЧИЛЬНОГО СТАНА | 1996 |
|
RU2120341C1 |
| ТЯГОВОЕ УСТРОЙСТВО ВОЛОЧИЛЬНОГО СТАНА | 1992 |
|
RU2063280C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| СПОСОБ ПРОИЗВОДСТВА ВЫСОКОТОЧНЫХ КОЛЛЕКТОРНЫХ ПРОФИЛЕЙ | 1996 |
|
RU2090273C1 |
| АВТОМАТИЧЕСКИЙ ТРУБОПРОКАТНЫЙ СТАН | 1994 |
|
RU2084298C1 |
| ВОЛОЧИЛЬНЫЙ СТАН | 1973 |
|
SU387761A1 |
| ЦЕНТРОВАТЕЛЬ ТРУБОПРОКАТНОГО СТАНА | 1992 |
|
RU2031750C1 |
| СТАН ДЛЯ РАСКАТКИ КОЛЕЦ | 1993 |
|
RU2042463C1 |
| ТРЕХВАЛКОВЫЙ КАЛИБР И СПОСОБ ЕГО НАСТРОЙКИ | 1992 |
|
RU2056956C1 |
| ДВУХКЛЕТЕВОЙ БЛОК ТРЕХРОЛИКОВЫХ КЛЕТЕЙ | 1999 |
|
RU2177385C2 |
Изобретение относится к волочильному производству, а именно к конструкциям непрерывных волочильных станов с кулачковым приводом. Непрерывный волочильный стан состоит из станины с доской волок и приводного вала с установленными на нем двумя цилиндрическими кулаками. Цилиндрические кулаки развернуты друг относительно друга на 180° и имеют гребни толщиной "a" рабочего хода с максимально возможными углами давления α на развертке профиля кулака и гребни холостого хода с максимально возможными углами давления β развертке профиля кулака. При этом две волочильные каретки кинематически связаны с кулаками через ролики рабочего хода с радиусом R и ролики холостого хода с радиусом г. Оси вращения роликов перпендикулярны осям вращения кулаков. Для повышения производительности волочильного стана без увеличения его габаритов ось вращения роликов холостого хода смещена относительно оси вращения кулака на величину Х =(R+r+a)•(l/cosα)•tg (0,05-0,2)β. 4 ил.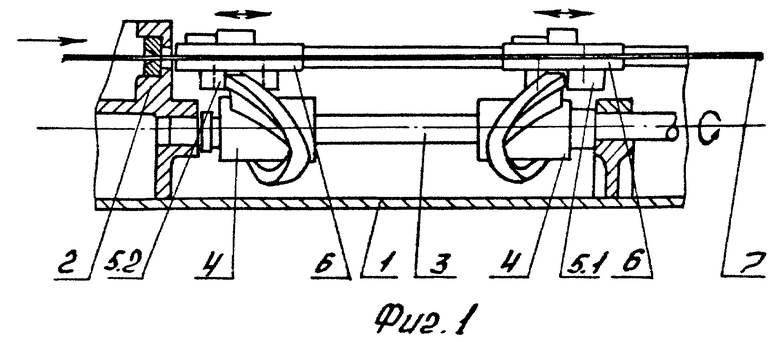
Непрерывный волочильный стан, включающий станину с доской волок, приводной вал с установленными на нем двумя цилиндрическими кулаками, развернутыми друг относительно друга на 180o и имеющими гребни толщиной а рабочего хода с максимально возможными углами давления α на развертке профиля кулака и гребни холостого хода с максимально возможными углами давления β на развертке профиля кулака, и две волочильные каретки, кинематически связанные с кулаками через ролики рабочего хода с радиусом R и ролики холостого хода с радиусом r, при этом оси вращения роликов рабочего хода и оси вращения роликов холостого хода расположены на расстоянии А, а оси вращения кулаков перпендикулярны осям вращения роликов, отличающийся тем, что ось вращения роликов холостого хода смещена относительно оси вращения кулака на величину Х, равную
X = (R+r+a)•(1/cosα)•tg(0,05-0,2)β.
| Баранов Г.Л., Еремеев В.К | |||
| Конструкции непрерывных волочильных станов в СССР и за рубежом, Металлургическое оборудование, ЦНИИТЭИТяжмаш, N 30, 1983, с.9-12 | |||
| 0 |
|
SU157955A1 | |
| Устройство для геоэлектроразведки | 1990 |
|
SU1777110A1 |
| GB 1302936 A, 10.01.1973. | |||

