Изобретение относится к устройствам для художественно-декоративной обработки твердых материалов, например стекла и камня, в частности габбро, мрамора и т. д., и может быть использовано при оформлении фасадов зданий и сооружений, памятников, украшения интерьеров помещений.
Известно устройство для гравирования (ЕПВ N 0104123, кл. МКИ B 41 C 1/04, оп. 28.03.84), содержащее компьютер с блоком подготовки и ввода информации, исполнительный механизм ударного действия для нанесения изображения на изделие, приводные устройства, обеспечивающие пошаговое перемещение ударного инструмента параллельно обрабатываемой поверхности.
Недостатком данного устройства является невысокая достоверность передачи изображения и недостаточное быстродействие.
Наиболее близким по технической сущности является маркировочная или гравировальная машина (Великобритания N 2002694, кл. МКИ B 44 B 3/00, оп. 28.02.79), выбранная в качестве прототипа, содержащая компьютер с блоком подготовки и ввода информации, исполнительный механизм, включающий ударный инструмент с приводом вертикального движения, подключенный через блок управления приводом вертикального движения к компьютеру, приводные устройства горизонтального движения исполнительного механизма по координатам X и Y, связанные с приводом вертикального движения и подключенные к компьютеру через электронные устройства управления, и обрабатываемое изделие, закрепленное на рабочем столе.
Отличительной особенностью гравировальной машины является использование ударного инструмента прерывистого действия, приводимого в движение в вертикальном направлении силовым приводом посредством сжатого воздуха и снабженного пружиной для обеспечения возврата ударного инструмента в исходное положение, а приводные устройства горизонтального движения исполнительного механизма по координатам X и Y состоят из двух шаговых двигателей, каждый из которых приспособлен перемещать ударный инструмент относительно обрабатываемого изделия.
Недостатком описанного устройства является невозможность управления параметрами вертикального движения ударного инструмента из-за отсутствия обратной связи ударного инструмента с силовым приводом, что не позволяет реализовать алгоритм оптимального для данного типа материала вертикального движения ударного инструмента и, в свою очередь, не дает возможность достигать высокой достоверности при передаче изображения и увеличивать быстродействие при нанесении изображения, а пошаговое перемещение ударного инструмента над поверхностью обрабатываемого изделия с остановкой для нанесения удара по поверхности обрабатываемого изделия увеличивает время нанесения изображения, также снижая производительность устройства.
В основу изобретения поставлена задача разработки устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия с высокой степенью достоверности передачи изображения с одновременным повышением его быстродействия, в результате решения которой достигается повышение качества получаемого изделия и увеличение производительности труда.
Поставленная задача решается тем, что в устройстве для нанесения полутонового изображения на плоскую поверхность полированного изделия, содержащем компьютер с блоком подготовки и ввода информации, исполнительный механизм, включающий ударный инструмент с приводом вертикального движения, подключенный через блок управления приводом вертикального движения к компьютеру, приводные устройства горизонтального движения исполнительного механизма по координатам X и Y, связанные с приводом вертикального движения и подключенные к компьютеру через электронные устройства управления, и зажимное устройство с обрабатываемым изделием,
в качестве привода вертикального движения использован электродинамический привод вертикального движения ударного инструмента, выключающий катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента, и прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов,
и дополнительно введены
устройство управления параметрами вертикального движения ударного инструмента, включенное в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения ударного инструмента,
и датчик координаты точки удара, механически соединенный с приводом устройства горизонтального движения исполнительного механизма по координате X.
Сопоставительный анализ заявляемого устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия с прототипом (пат. Великобритании N 2002694) позволяет сделать вывод, что заявляемое устройство отличается тем, что
- в качестве привода вертикального движения использован электродинамический привод вертикального движения ударного инструмента, включающий катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента, и прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов, и дополнительно введены:
- устройство управления параметрами вертикального движения ударного инструмента, включенное в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения ударного инструмента,
- датчик координаты точки удара, механически соединенный с приводом устройства горизонтального движения исполнительного механизма по координате X,
что является необходимым и достаточным для создания устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия с высокой степенью достоверности передачи изображения при высоком быстродействии.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое изобретение не известно из уровня техники, что свидетельствует о его соответствии критерию "Новизна".
Использование электродинамического привода, включающего катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента и прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов, позволяет добиться следующего. Эластичные подвесы удерживают диэлектрический цилиндр с намотанной на него катушкой в некотором равновесном положении соосно корпусу исполнительного механизма, центрируя ударный инструмент с диэлектрическим цилиндром во всех возможных точках динамического диапазона смещений при вертикальном движении и в момент касания ударного инструмента поверхности обрабатываемого изделия при горизонтальном движении исполнительного механизма по координате X. Такое крепление диэлектрического цилиндра с намотанной на него катушкой обеспечивает его подвижность относительно корпуса исполнительного механизма и дает ему возможность при своем вертикальном движении отслеживать характер изменения управляющего импульса, поступающего с блока управления электродинамическим приводом вертикального движения ударного инструмента на обмотку катушки.
Введение устройства управления параметрами вертикального движения ударного инструмента, включенного в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения, позволяет формировать управляющий импульс, в результате чего на обмотку катушки поступает импульс управляющего напряжения необходимой формы, определяющей скорость вертикального движения ударного инструмента в каждый момент времени прямого и обратного хода ударного инструмента, причем скорость вертикального движения ударного инструмента находится в пропорциональной зависимости от яркостных характеристик передаваемого изображения, а значит, определяет силу удара по обрабатываемой поверхности в зависимости от яркости передаваемого фрагмента изображения, что дает возможность получения полутонового изображения на обрабатываемой поверхности, увеличивая его достоверность. Кроме того, устройство управления параметрами вертикального движения ударного инструмента позволяет минимизировать время отхода ударного инструмента после нанесения удара от поверхности обрабатываемого изделия и его установку в рабочее положение без переколебаний, обеспечивая тем самым минимальное время подготовки для нанесения следующего удара, что повышает быстродействие всего устройства.
Введение датчика координаты точки удара, механически соединенного с приводом устройства горизонтального движения исполнительного механизма по координате X, формирующего непрерывную последовательность разрешающих импульсов (предполагаемых точек ударов) позволяет синхронизировать работу устройства управления параметрами вертикального движения ударного инструмента и обеспечивает возможность непрерывного горизонтального движения исполнительного механизма по координате X без остановки на время вертикального движения ударного инструмента для нанесения удара и возврата ударного инструмента в рабочее положение после обработки разрешающих импульсов компьютером и подготовки информации о предполагаемом ударе, что существенно сокращает время прохода исполнительного механизма при горизонтальном движении вдоль каждой строки по координате X, обеспечивая тем самым высокое быстродействие. А частота следования разрешающих импульсов позволяет регулировать расстояние между наносимыми ударами вдоль координаты X, что совместно с регулируемой силой удара ударного инструмента дает повышение достоверности и качества переносимого изображения.
Таким образом, совместное использование электродинамического привода вертикального движения ударного инструмента, включающего катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента и прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов,
устройства управления параметрами вертикального движения ударного инструмента, включенного в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения ударного инструмента
и датчика координаты точки удара, механически соединенного с приводом устройства горизонтального перемещения исполнительного механизма по координате X,
является необходимым и достаточным для обеспечения возможности управления скоростью вертикального движения ударного инструмента при непрерывном нанесении полутонового изображения на обрабатываемую поверхность, позволяя при этом достичь высокую степень достоверности передачи изображения при высоком быстродействии.
Сущность заявляемого изобретения для специалиста не следует явным образом из уровня техники, что позволяет сделать вывод о его соответствии критерию "Изобретательский уровень".
Возможность использования заявляемого устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия в отечественной промышленности позволяет сделать вывод о его соответствии критерию "Промышленная применимость".
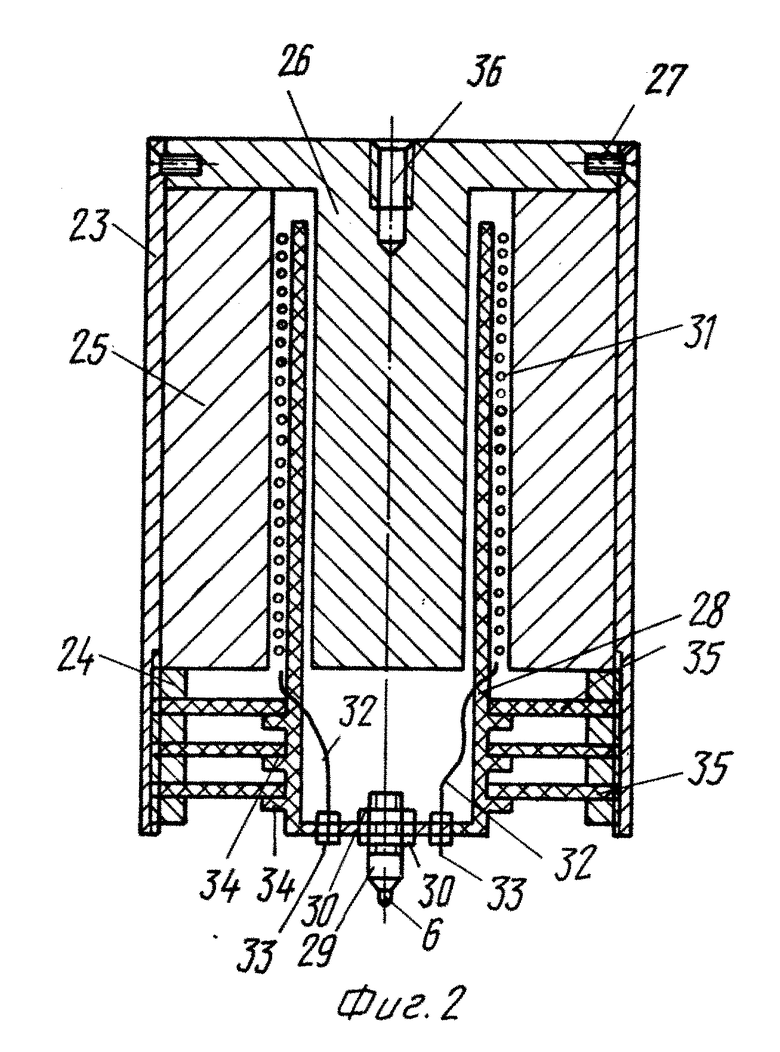
На фиг. 1 представлена функциональная схема устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия.
На фиг. 2 изображена конструкция исполнительного механизма.
Функциональная схема по фиг. 1 состоит из следующих элементов.
1 - Компьютер.
2 - Блок подготовки и ввода информации.
3 - Сканер.
4 - Графический оригинал.
5 - Исполнительный механизм.
6 - Ударный инструмент.
7 - Электродинамический привод вертикального движения ударного инструмента 6.
8 - Блок управления электродинамическим приводом вертикального движения ударного инструмента 6.
9 - Устройство управления параметрами вертикального движения ударного инструмента 6.
10 - Приводное устройство горизонтального движения исполнительного механизма 5 по координате Y.
11 - Устройство горизонтального движения исполнительного механизма 5 по координате Y.
12 - Двигатель по координате Y.
13 - Приводное устройство горизонтального движения исполнительного механизма 5 по координате X.
14 - Устройство горизонтального движения исполнительного механизма 5 по координате X.
15 - Двигатель по координате X.
16 - Электронные устройства управления.
17 - Электронная схема управления приводным устройством 10.
18 - Электронная схема управления приводным устройством 13.
19 - Датчик рабочей зоны исполнительного механизма 5.
20 - Датчик координаты точки удара.
21 - Обрабатываемое изделие.
22 - Зажимное устройство.
Компьютер 1 подключен к блоку подготовки и ввода информации 2, состоящему из автоматического черно-белого планшетного сканера 3 и графического оригинала 4. Исполнительный механизм 5, включающий ударный инструмент 6 и электродинамический привод вертикального движения 7, подключен к компьютеру 1 через блок управления электродинамическим приводом вертикального движения 8. Устройство управления параметрами вертикального движения 9 ударного инструмента 6, представляющее собой функциональный усилитель, включено в цепь обратной связи электродинамического привода вертикального движения 7 и блока управления электродинамическим приводом вертикального движения 8 и служит для формирования импульса управляющего напряжения, поступающего с блока управления электродинамическим приводом вертикального движения 8 на электродинамический привод вертикального движения 7. Исполнительный механизм 5, механически соединенный с приводным устройством горизонтального движения 10 по координате Y, обеспечивающим построчное перемещение исполнительного механизма 5 и включающим устройство горизонтального движения 11 по координате Y, представляющее собой ходовой винт с подвижной кареткой, и двигатель 12 по координате Y, через электронную схему управления 17 приводным устройством 10 подключен к компьютеру 1. С другой стороны, исполнительный механизм 5, механически соединенный с приводным устройством горизонтального движения 13 по координате X, обеспечивающим перемещение исполнительного механизма 5 вдоль каждой строки и включающим последовательно соединенные устройство горизонтального движения 14 по координате X, также представляющее собой ходовой винт с подвижной кареткой, и двигатель 15 по координате X (коллекторный двигатель постоянного тока, например ДПР-52), через электронную схему управления 18 приводным устройством 13 подключен к компьютеру 1. Датчик рабочей зоны 19, представляющий собой сочетание оптопары и двух планок, механически соединенный с устройством горизонтального движения 14 по координате X, подключен к компьютеру 1. Датчик координаты точки удара 20, механически связанный с устройством горизонтального движения 14 по координате X, представляющий собой сочетание оптопары и перфорированного по окружности диска, выполненного с возможностью вращения вокруг своей оси, и аксиально закрепленного на ходовом виде устройства 14 таким образом, что его отверстия расположены в рабочей зоне оптопары, также подключен к компьютеру 1. Ударный инструмент 6 расположен над обрабатываемым изделием 21, закрепленным в зажимном устройстве 22.
Конструкция исполнительного механизма на фиг. 2 представляет собой следующее.
23 - Цилиндрический корпус.
24 - Крепежные кольца.
25 - Цилиндрический магнит.
26 - Сердечник.
27 - Крепежные винты.
28 - Цилиндр из диэлектрика.
29 - Держатель ударного инструмента.
30 - Гайки.
31 - Катушка.
32 - Выводы катушки.
33 - Контакты.
34 - Выточки (кольцеобразные выступы прямоугольного сечения).
35 - Эластичные подвесы.
36 - Крепежное отверстие.
Исполнительный механизм 5 состоит из цилиндрического корпуса 23, в нижней части которого имеется резьба для вворачивания в цилиндр 23 крепежных колец 24, на верхнее из которых опирается нижней своей кромкой цилиндрический магнит 25, верхняя кромка которого соприкасается вплотную с сердечником 26, прикрепленным к верхней части цилиндра 23 крепежными винтами 27. Сердечник 26 расположен аксиально с цилиндрическим магнитом 25 и отцентрирован относительно оси вращения последнего. В зазор между сердечником 26 и цилиндрическим магнитом 25 помещен цилиндр 28 из диэлектрика, имеющий дно, в котором точно по оси проделано отверстие для крепления держателя 29 ударного инструмента 6, фиксируемого гайками 30. На цилиндр 28 от верхней его части до нижней кромки цилиндрического магнита 25 намотана катушка 31, имеющая выводы 32 через дно цилиндра 28, соединенные с контактами 33. В нижней части цилиндра 28 имеются выточки (кольцеобразные выступы прямоугольного сечения) 34, на которых закрепляются по внутренней длине окружности эластичные подвесы 35, имеющие форму шайб, внешние образующие которых зажимаются между крепежными кольцами 24. Наличие эластичных (например, резиновых) подвесов (шайб) 35 обеспечивает с одной стороны устойчивое положение цилиндра 28 с намотанной на него катушкой 31, а с другой - возможность совершать цилиндром 28 вертикальное поступательное движение относительно некоторого среднего положения устойчивого равновесия в зависимости от силы тока, протекающего по катушке 31. Крепежное отверстие 36 служит для закрепления исполнительного механизма 5 на каретке устройства горизонтального движения 14 по координате X.
Устройство для нанесения полутонового изображения на плоскую поверхность полированного изделия работает следующим образом. Графическое изображение оригинала 4 при помощи сканера 3 переносят в компьютер 1. Компьютер 1 в соответствии с заложенным в него программным обеспечением преобразовывает полученные от сканера 3 данные в вид растрового массива чисел, где по координате X формируется массив данных, соответствующий одной строке прохода ударного инструмента 6 над поверхностью обрабатываемого изделия 21. В каждой позиции растровой строки по координате X содержится информация не только о координатах данной позиции, но и о силе удара, с которой ударный инструмент 6 нанесет удар по обрабатываемой поверхности изделия 21, зависящей от яркости передаваемой точки графического изображения. По координате Y в растровом массиве данных содержится информация о количестве строк в растровой развертке и, следовательно, количество переключений приводного устройства горизонтального движения 10 по координате Y во время всего цикла работы. Кроме того, компьютер 1 содержит предварительно внесенную информацию о геометрических размерах переносимого изображения, яркостных и механических характеристиках данного вида материала, из которого изготовлено изделие. Обрабатываемое полированное изделие 21 закрепляют в зажимном устройстве 22 и производят предварительную настройку устройства для нанесения полутонового изображения, для чего регулируют и настраивают датчик рабочей 19 зоны по координате X, который определяет размер рабочей зоны для исполнительного механизма 5. Местоположение исполнительного механизма 5 по координате Y в начале работы задается границей изображения. Компьютер 1 выдает сигнал на электронную схему управления 18 приводным устройством горизонтального движения 13 по координате X, в результате чего исполнительный механизм 5, состоящий из электродинамического привода вертикального движения 7 и ударного инструмента 6, начинает горизонтальное движение по координате X над обрабатываемым изделием 21, причем высота подъема ударного инструмента 6 над поверхностью обрабатываемого изделия 21 устанавливается по сигналу с устройства управления параметрами вертикального движения 9 ударного инструмента 6. При входе исполнительного механизма 5 в рабочую зону, датчик рабочей зоны 19 формирует сигнал о начале рабочей зоны графического изображения, а датчик координаты точки удара 20 формирует последовательность импульсов напряжения, которые соответствует позициям нанесения ударов. В компьютере 1 по мере продвижения исполнительного механизма 5 по строке происходит сравнение позиций точек графического образа строки оригинала с приходящими сигналами позиций нанесения удара с датчика координат точки удара 20. При совпадении этих позиций компьютер 1 выдает сигнал на блок управления электродинамическим приводом вертикального движения 8 ударного инструмента 6, где он преобразуется в импульс, форма которого находится в пропорциональной зависимости от яркости передаваемого изображения, и выдается на обмотку катушки 31 электродинамического привода вертикального движения 7, в результате чего диэлектрический цилиндр 28, жестко связанный с ударным инструментом 6 и с намотанной на нем катушкой 31 начинает совершать вертикальное движение. Намотанная на диэлектрический цилиндр 28 катушка 31 совместно с эластичными подвесами 35, удерживающими диэлектрический цилиндр 28 соосно корпусу исполнительного механизма 5, позволяет управлять его движением, отслеживания характер изменения импульса управляющего напряжения, приложенного к обмоткам катушки 31 с блока управления электродинамическим приводом вертикального движения 7 ударного инструмента 6. Ударный инструмент 6 наносит удар по поверхности обрабатываемого изделия 21 с силой, пропорциональной информации о яркостной характеристике точки графического оригинала, после чего на поверхности обрабатываемого изделия 21 остается пятно от разрушения, причем диаметр пятна пропорционален яркостной характеристике передаваемой точки графического изображения. Устройство управления параметрами вертикального движения 9, включенное в цепь обратной связи электродинамического привода вертикального движения 7 и блока управления электродинамическим приводом вертикального движения 8 ударного инструмента 6, формирует управляющее напряжение, обеспечивая требуемые амплитудно-частотные характеристики электродинамического привода вертикального движения 7, усчитывая механические характеристики обрабатываемого изделия 21, то есть позволяет получить необходимую скорость вертикального движения ударного инструмента 6 в прямом и обратном направлениях, минимизировать время отхода последнего от обрабатываемой поверхности 21 после удара и его установку в рабочее положение без переколебаний. Двигатель 15 по координате X привода горизонтального движения 13 по координате X вращается непрерывно, перемещая исполнительный механизм 5 по координате X без остановки для нанесения каждого удара, а датчик координаты точки удара 20 выдает непрерывную последовательность разрешающих импульсов напряжений координат точек предполагаемого удара, частота следования которых определяет частоту срабатывания ударного инструмента. При этом нанесение изображения происходит непрерывно, пока исполнительный механизм 5 не осуществит проход строки до конца рабочей зоны по координате X. В момент достижения исполнительным механизмом 5 границы рабочей зоны по координате X датчик рабочей зоны 19 выдаст на компьютер 1 сигнал, по которому последний через электронную схему управления 18 приводным устройством горизонтального движения 13 по координате X осуществит остановку двигателя 15 по координате X и через электронную схему управления 17 приводным устройством горизонтального движения 10 по координате Y произведет включение двигателя 12 по координате Y, и осуществит перевод исполнительного механизма 5 на следующую строку при помощи устройства горизонтального движения 11 по координате Y. Далее компьютер 1 по сигналу с датчика рабочей зоны 19 через электронную схему управления 18 приводным устройством 13 по координате X осуществит реверсное включение двигателя 15 по координате X, в результате чего исполнительный механизм 5 начет перемещаться по координате X в обратном направлении, пока не достигнет конца рабочей зоны. Описанный цикл работы устройства для нанесения полутонового изображения на плоскую поверхность полированного изделия будет повторяться до тех пор, пока все графические изображение 4 не будет перенесено построчно на поверхность обрабатываемого изделия 22.
Использование в заявляемом устройстве для нанесения полутонового изображения на плоскую поверхность полированного изделия электродинамического привода вертикального движения ударного инструмента, включающего катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента, и прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов,
устройства управления параметрами вертикального движения ударного инструмента, включенного в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения ударного инструмента,
и датчика координаты точки удара, механически соединенного с приводом устройства горизонтального движения исполнительного механизма по координате X,
позволяет получить высокую степень достоверности при переносе графического изображения на полированную поверхность обрабатываемого изделия с одновременным повышением быстродействия устройства, обеспечивая тем самым высокое качество получаемого изделия при высокой производительности труда.
Изобретение относится к устройствам для художественно-декоративной обработки твердых материалов и может быть использовано при оформлении фасадов зданий и сооружений, памятников и украшения интерьеров. Сущность изобретения заключается в том, что устройство содержит компьютер с блоком подготовки и ввода информации, исполнительный механизм, включающий ударный инструмент с приводом вертикального движения, подключенный к компьютеру через блок управления приводом вертикального движения, приводные устройства управления горизонтальным движением исполнительного механизма по координатам Х и Y, связанные с приводом вертикального движения и подключенные к компьютеру через электронные устройства управления, в качестве привода вертикального движения использован электродинамический привод вертикального движения ударного инструмента, включающий катушку, намотанную на подвижный относительно корпуса исполнительного механизма диэлектрический цилиндр с жестко закрепленным на нем ударным инструментом, а сам диэлектрический цилиндр прикреплен к корпусу исполнительного механизма при помощи эластичных подвесов, обеспечивающих его подвижность и центрирование как в статическом, так и динамическом состоянии. Изобретение повышает достоверность передачи изображения и быстродействие. 2 ил.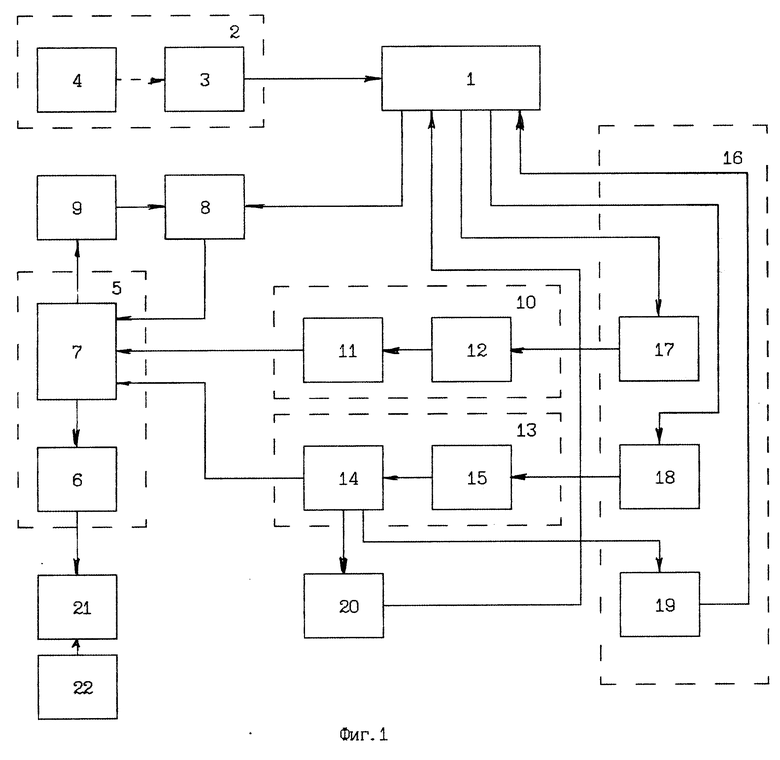
Устройство для нанесения полутонового изображения на плоскую поверхность полированного изделия, содержащее компьютер с блоком подготовки и ввода информации, исполнительный механизм, включающий ударный инструмент с приводом вертикального движения, подключенный через блок управления приводом вертикального движения к компьютеру, приводные устройства горизонтального движения исполнительного механизма по координатам X и Y, связанные с приводом вертикального движения и подключенные к компьютеру через электронные устройства управления, и зажимное устройство с обрабатываемым изделием, отличающееся тем, что в качестве привода вертикального движения использован электродинамический привод вертикального движения ударного инструмента, включающий катушку, намотанную на боковую поверхность подвижного относительно корпуса исполнительного механизма диэлектрического цилиндра, на свободном конце которого жестко закреплен держатель ударного инструмента, прикрепленного к корпусу исполнительного механизма при помощи эластичных подвесов, дополнительно введены устройство управления параметрами вертикального движения ударного инструмента, включенное в цепь обратной связи электродинамического привода вертикального движения ударного инструмента и блока управления электродинамическим приводом вертикального движения ударного инструмента, и датчик координаты точки удара, механически соединенный с приводом устройства горизонтального движения исполнительного механизма по координате X.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, заявка, 0104123, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| GB, заявка, 2002694, кл | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
