Изобретение относится к самоходным колесным транспортным средствам. Оно касается полноприводных колесных машин с гидрообъемной трансмиссией привода колес.
Известны описания патентов различных многоосных колесных машин с гидрообъемной трансмиссией привода всех колес (патенты РФ №№2130388, 2141900).
В опубликованной в Великобритании заявке №2073684 показана полноприводная шарнирно-сочлененная колесная машина с гидрообъемной трансмиссией, состоящая из передней и задней четырехколесных тележек с балансирной подвеской неуправляемых колес, одно из которых в каждой тележке у каждого ее борта имеет непосредственный привод от гидромотора, а другое колесо имеет цепной привод от этого же гидромотора. Однако в такой машине невозможно осуществить индивидуальное распределение моментов каждого из колес, установленные колеса с высоким рабочим давлением дают высокое давление на грунт и, как следствие, недостаточно высокую проходимость. Отсутствует возможность преодоления водных преград на плаву.
Известна полноприводная многоцелевая машина с гидрообъемной трансмиссией, представленная в описании к выданному в США патенту №4600069. Эта машина имеет по меньшей мере шесть неуправляемых колес, равномерно расположенных вдоль рамы по разные ее стороны, на раме впереди установлена пассажирская кабина, за кабиной поперек машины размещен двигатель и насосная станция, состоящая из согласующего редуктора и двух насосов, с которыми соединены трубопроводами два асиально-поршневых гидромотора, с одним из которых цепной передачей соединены валы привода колес, расположенных у одного борта машины, а с другим гидромотором тоже цепной передачей соединены валы привода колес, расположенных у другого борта машины. Поворот этой машины производится путем вращения колес разных бортов с различной частотой, т.е. бортовым способом. В такой машине также невозможно осуществить индивидуальное распределение моментов каждого из колес, установленные колеса с высоким рабочим давлением дают высокое давление на грунт и, как следствие, недостаточно высокую проходимость. Отсутствует возможность преодоления водных преград на плаву.
Известна полноприводная колесная машина с гидрообъемной трансмиссией, представленная в описании к патенту №№RU2245260, RU 2398149. Машина содержит раму, на которую установлена кабина, имеет задние и передние управляемые колеса и расположенные между ними средние, двигатель, размещенный вдоль рамы сзади кабины, насосную станцию гидрообъемной трансмиссии, состоящую из редуктора и трех регулируемых насосов, с которыми трубопроводами соединены регулируемые гидромоторы раздельного привода колес, размещенные вдоль рамы автомобиля, которые через бортовый редуктор соединены с валами ведущих колес. Машина имеет устройство автоматического адаптивного управления бесступенчатой гидрообъемной трансмиссией полноприводного колесного транспортного средства, т.е. возможностью управления крутящими моментами каждого из колес. Установленные колеса с высоким рабочим давлением дают высокое давление на грунт и, как следствие, недостаточно высокую проходимость. Отсутствует возможность преодоления водных преград на плаву.
Наиболее близкой по технической сущности является полноприводная колесная машина с гидрообъемной трансмиссией, представленная в описании к патенту №RU15660. В машине применена гидростатическая трансмиссия. На двигателе внутреннего сгорания установлены два гидронасоса с изменяемым объемом рабочей камеры. Давление, создаваемое насосами через систему рукавов высокого давления и трубопроводов, передается к восьми гидромоторам с регулируемым объемом рабочей камеры по параллельной схеме. Каждый насос подает давление на четыре гидромотора, расположенных на одном борту. Каждый из гидромоторов преобразует подаваемое давление в крутящий момент на выходном валу, который через редуктор приводит в движение колеса. Каждый из гидромоторов приводит в движение свое колесо. Параметры каждого из гидромоторов можно контролировать отдельно, добиваясь оптимальтной подачи крутящего момента на каждое колесо.
Поворот машины может осуществляеться бортовым способом за счет перераспределения подаваемого давления жидкости между гидромоторами и насосом одного борта относительно другого, что приводит к изменению крутящего момента и угловых скоростей на колесах соответствующего борта и приводит машину к повороту. К недостаткам такой машины можно отнести отсутствие автоматического управления параметрами гидромашин или автоматического управления крутящими моментами каждого из колес в зависимости от характеристик опорных грунтов
Технический результат - создание энергоэффективной полноприводной многоцелевой плавающей машины с колесной формулой 8х8 на шинах сверхнизкого давления, оборудованной гидрообъемной трансмиссией с возможностью автоматического управления крутящими моментами каждого из колес в зависимости от характеристик опорных грунтов и возможностью бортового поворота.
Технический результат достигается тем, что полноприводная колесная машина, содержащая цельнометаллический кузов, образующий единое целое с водоизмещающим основанием - лодкой, имеет колесный движитель на шинах сверхнизкого давления. В передней части кузова расположены место водителя и пассажиров, в задней - пассажирский отсек. Силовая установка расположена в центральной части кузова, обеспечивая равномерную развесовку по осям машины. На силовой установке расположены тандемно (один за другим) аксиально-поршневые насосы (с регулируемым объемом подачи гидравлической жидкости) к восьми исполнительным аксильно-поршневым гидромоторам (с регулируемым объемом) каждого из восьми колес. Гидромоторы передают крутящий момент через редукторы на привод ступиц ведущих колес машины. Объемы гидромашин (гидронасосов и гидромоторов) могут автоматически изменяться в зависимости от условий движения каждого из колес.
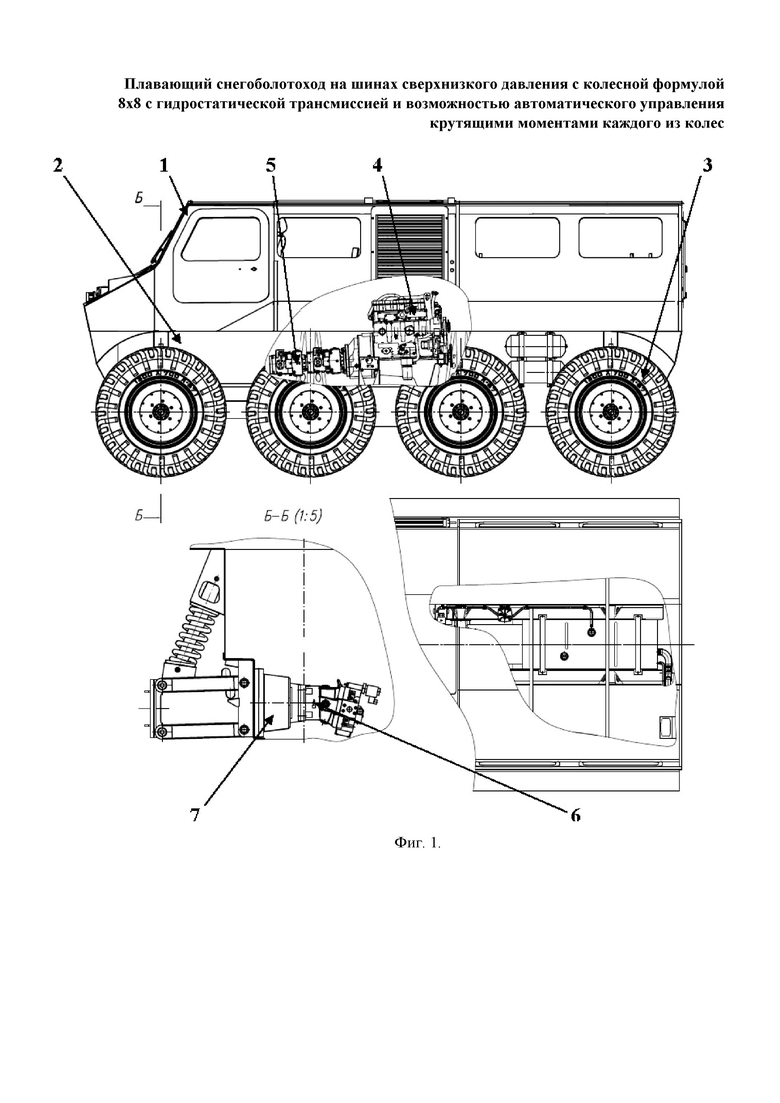
На фиг.1 изображена полноприводная колесная машина с гидрообъемной трансмиссией, вид сбоку.
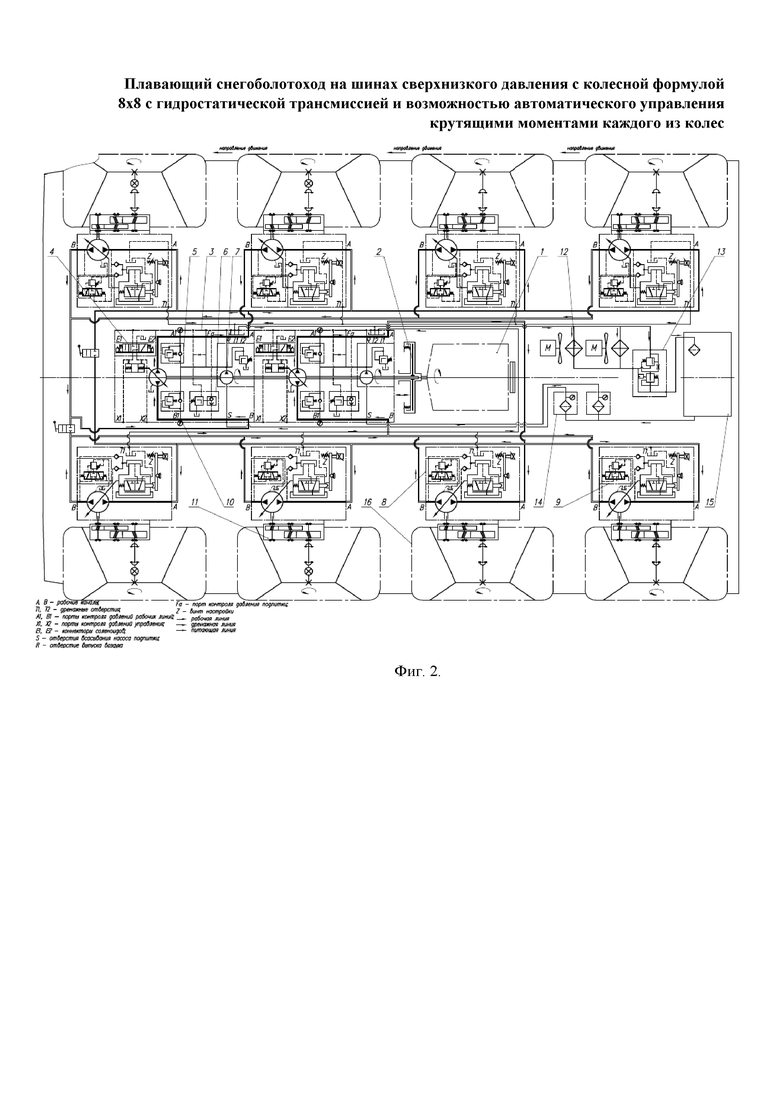
На фиг. 2 представлена гидравлическая схема гидрообъемной трансмиссии машины.
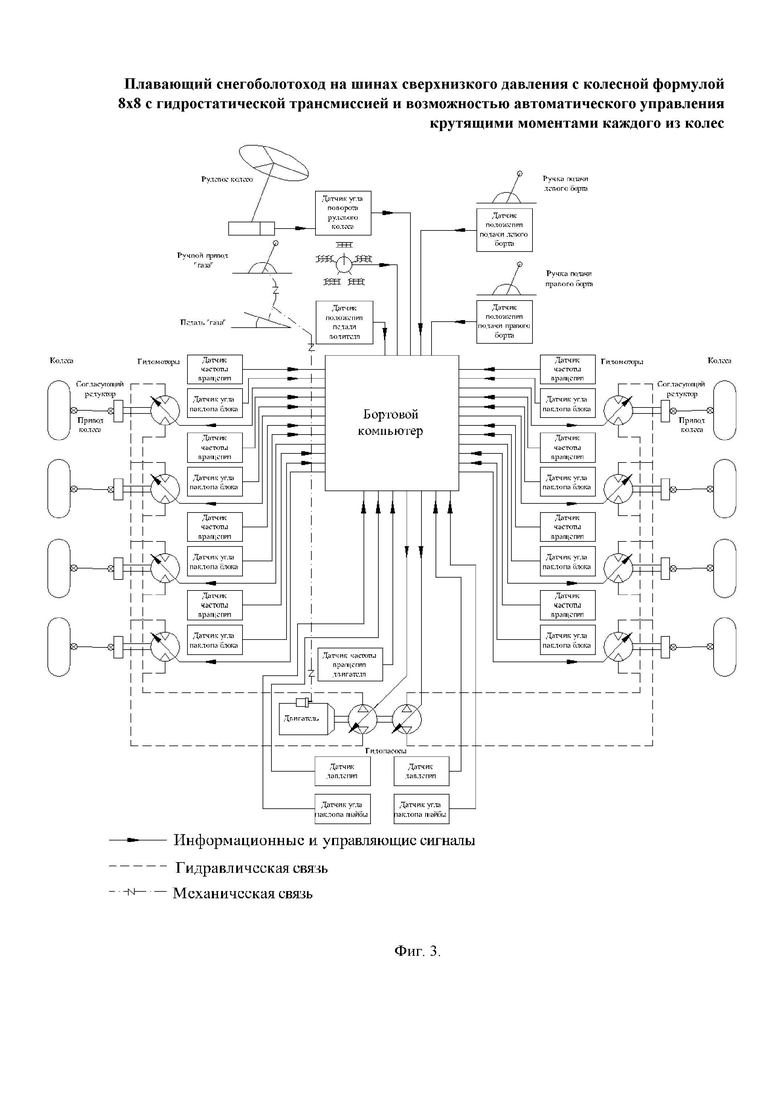
На фиг. 3 представлена структурная схема автоматического управления агрегатами гидросистемы.
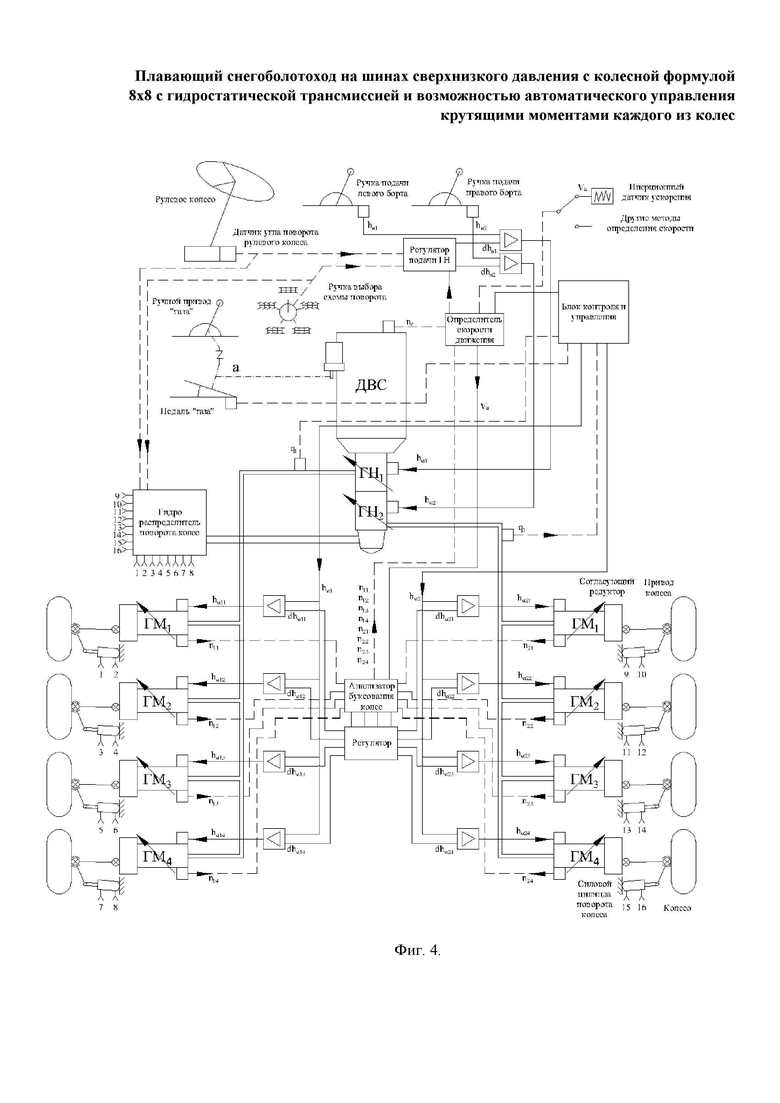
На фиг. 4 представлена структурная схема.
Машина содержит цельнометаллический кузов (фиг.1) 1, образующий единое целое с водоизмещающим основанием - лодкой 2. Движитель машины колесный на шинах сверхнизкого давления 3. В передней части кузова расположены место водителя и пассажиров, в задней - пассажирский отсек. Силовая установка 4 расположена в центральной части кузова, обеспечивая равномерную развесовку по осям машины. На силовой установке расположены тандемно (один за другим) аксиально-поршневые насосы 5 (с регулируемым объемом подачи гидравлической жидкости) к исполнительным аксильно-поршневым гидромоторам 6 (с регулируемым объемом) каждого из восьми колес. Гидромоторы передают крутящий момент через редукторы 7 на привод ступиц ведущих колес машины.
Крутящий момент (фиг.2) от двигателя 1 передается через муфту включения (сцепление) 2 на вал привода тандема аксиально-поршневых гидронасосов 3. Сигнал от системы автоматического управления поступает на блоки электроуправления 4 насосов, которые подают команду на изменение объемов насосов. Рабочая жидкость по питающей линии воздействует на конструктивные элементы насосов, изменяя объемную подачу рабочей жидкости, которая подается на гидромоторы 8, приводя их в действие. Аналогичным образом сигнал управления поступает на блоки управления гидромоторов, изменяя их рабочие объемы и, как следствие, крутящие моменты и угловые скорости на выходных валах. Неизбежные протечки в полостях гидромашин по дренажной линии через систему фильтров 14, термомтат 13 и теплообменник 12 поступают в гидробак 15. Крутящие моменты от гидромоторов через понижающие редукторы 11 приводят во вращение колеса машины 16.
Автоматическая система управления состоит из бортовой управляющей ЭВМ (или комплекса вычислительных блоков), системы датчиков, аналого-цифровых преобразователей сигналов потенциометрических датчиков, преобразователей сигналов импульсных датчиков, исполнительных механизмов, согласующих устройств, блока питания и соединительных кабелей.
Структурная схема автоматического управления приведена на фиг.3. Она содержит систему датчиков, в которую входят: датчик угла положения педали водителя; датчик угла поворота рулевого колеса; датчик положения ручки выбора схемы поворота; датчик положения рычага управления регулятором подачи левого борта; датчик положения рычага управления регулятором подачи правого борта; датчик частоты вращения двигателя; датчик угла поворота шайбы насоса (2 шт.); датчик давления рабочей жидкости в контуре гидрообъемной трансмиссии (2 шт.); датчик угла наклона блока мотора (8 шт.); датчик частоты вращения мотора (8 шт.).
Функциональная схема системы управления МВТС представлена на фиг.4. Задачами каждого вычислительного блока является обеспечение безопасного и эффективного движения МВТС.
Анализатор буксования колес используется для оптимального распределения мощности по колесам ТС: вводит поправку к управляющему сигналу подачи моторов через регулятор, определяющую объем ГМ на основании данных об их частоте вращения и скорости движения, получаемой от «определителя скорости движения».
Определитель скорости движения определяет скорость движения в соответствии с заданным алгоритмом: может определять скорость на основании данных от «анализатора буксования колес» о частотах вращения колес, инерционного датчика ускорения или других методов определения скорости и данных о частоте вращения вала двигателя.
Регулятор подачи ГН: в зависимости от показаний датчика угла поворота рулевого колеса и данных ручки выбора схемы поворота, а также данных о скорости движения, вводит поправку к сигналам от датчиков положения рычагов управления регуляторами подачи бортов машины для учета криволинейности движения и определяет положение наклона шайбы ГН (подачи).
Блок контроля и управления: определяет расход ГМ и подачу ГН в зависимости от положения педали акселератора и данных с датчиков давления, а также данных о скорости движения.
Данная система обеспечивает регулировку подачи от ГН и регулировку расхода ГМ в зависимости от показаний комплекса датчиков с целью обеспечения наибольшей эффективности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| ПОЛНОПРИВОДНАЯ КОЛЕСНАЯ МАШИНА | 2002 |
|
RU2236357C2 |
| ПОЛНОПРИВОДНАЯ КОЛЕСНАЯ МАШИНА С ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ | 2002 |
|
RU2245260C2 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ, ПОЛНОСТЬЮ РАСПОЛОЖЕННОЙ В ПОДГУСЕНИЧНОМ ПРОСТРАНСТВЕ | 2023 |
|
RU2809167C1 |
| СИСТЕМА КОНТРОЛЯ ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИИ МАШИНЫ | 2013 |
|
RU2545144C2 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| СНЕГОБОЛОТОХОД | 2023 |
|
RU2801955C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2224678C1 |
Изобретение относится к транспортному машиностроению. Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8×8 с гидростатической трансмиссией с возможностью автоматического управления крутящими моментами каждого из колес в зависимости от характеристик опорных грунтов и возможностью бортового поворота. Параметры каждого гидронасоса и гидромотора, крутящий момент и угловую скорость, и крутящие моменты на ведущих колесах можно независимо автоматически изменять с помощью системы автоматического управления. Плавающий снегоболотоход имеет цельнометаллический водоизмещающий корпус, позволяющий преодолевать водные преграды на плаву. Достигается возможность автоматического управления крутящими моментами каждого из колес в зависимости от характеристик опорных грунтов и возможность бортового поворота. 4 ил.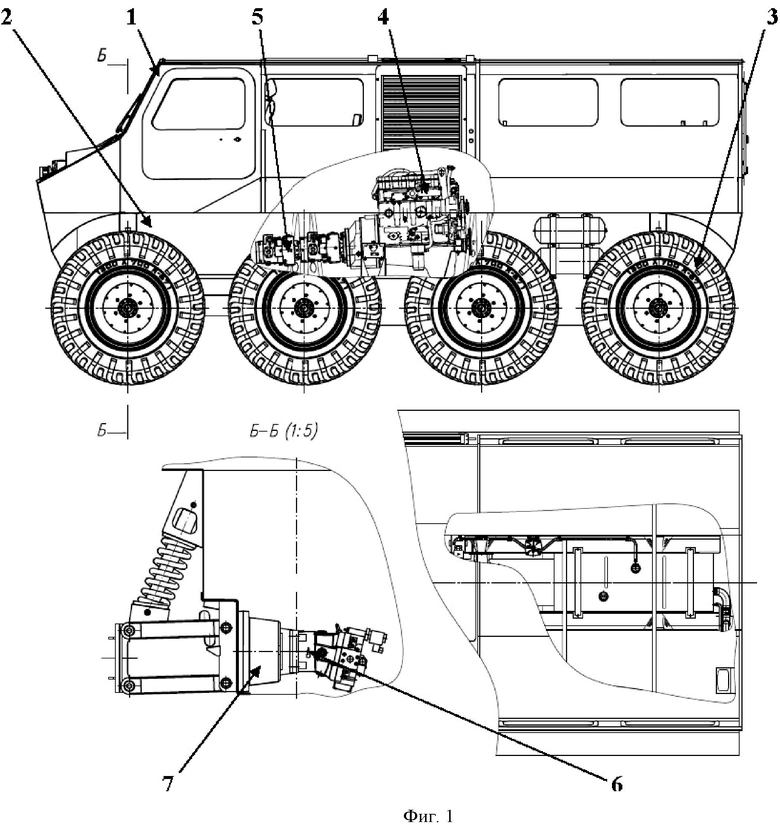
Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8×8 с гидростатической трансмиссией, с возможностью автоматического управления крутящими моментами каждого из колес в зависимости от характеристик опорных грунтов и возможностью бортового поворота, отличающийся тем, что параметры каждого гидронасоса и гидромотора, крутящий момент и угловую скорость, и крутящие моменты на ведущих колесах можно независимо автоматически изменять с помощью системы автоматического управления, при этом плавающий снегоболотоход имеет цельнометаллический водоизмещающий корпус, позволяющий преодолевать водные преграды на плаву.
| 0 |
|
SU153670A1 | |
| Система автоматического управления приводом ведущих колес многоосного транспортного средства | 1978 |
|
SU706262A1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2469878C2 |
| DE 4011291 A1, 17.10.1991 | |||
| US 2009062999 A1, 05.03.2009. | |||

