Изобретение относится к измерительной технике, а именно к преобразователям угловой скорости и линейного ускорения.
Известны преобразователь инерциальной первичной информации, содержащий корпус, установленную в нем пластину с внешней и внутренней рамками, соединенными между собой и пластинами упругими перемычками, оси кручения которых образуют две взаимно перпендикулярные оси вращения рамок, содержащий систему возбуждения колебаний, датчик положения [1] Затем преобразователь обеспечивает измерение только одного параметра: угловой скорости или линейного ускорения.
Преобразователь инерциальной первичной информации, обеспечивающий измерение угловой скорости и линейного ускорения и принятый за прототип, описан в [2] Он содержит корпус, первую пластину из монокристаллического материала с первым и вторым вибраторами, каждый из которых выполнен в виде язычка с параллельными плоскости пластины основными поверхностями, отделенного по трем сторонам от пластины и другого язычка и соединенного четвертом стороной с пластиной упругой перемычкой, обеспечивающей свободу углового перемещения вибратора по двум взаимно перпендикулярным осям, вторую и третью пластины, заключающие между собой первую пластину, систему возбуждения колебаний вибраторов с элементами силовых преобразователей на вибраторах, второй и третьей пластинах, преобразователи положения каждой основной поверхности каждого вибратора с их элементами на вибраторах, второй и третьей пластинах, первое, второе и третье устройства вычитания, первый и второй сумматоры, вычислительное устройство, причем с входами первого сумматора соединены выходы преобразователей положения, к прямому входу первого устройства вычитания подключен выход преобразователя положения основной поверхности первого вибратора, расположенной напротив второй пластины, к инверсному входу первого устройства вычитания выход преобразователя положения основной поверхности первого вибратора, расположенной напротив третьей пластины, к прямому входу второго устройства вычитания подключен выход преобразователя положения основной поверхности второго вибратора, расположенной напротив второй пластины, к инверсному входу второго устройства вычитания выход преобразователя положения основной поверхности второго вибратора, расположенной напротив третьей пластины, выходы первого и второго устройств вычитания подключены к входам второго сумматора, выход второго устройства вычитания подключен к прямому входу третьего устройства вычитания, выход первого устройства вычитания к инверсному входу третьего устройства вычитания, система возбуждения колебаний вибраторов содержит последовательно соединенные фазосдвигающую цепочку и усилитель, фазосдвигающая цепочка подключена к выходу первого сумматора, а усилитель к элементам силовых преобразователей на второй и третьей пластинах.
Недостатком такого преобразователя инерциальной первичной информации является погрешность измерения угловой скорости и линейного ускорения, вызванная изменением коэффициента динамической восприимчивости вибраторов, возникающих при возбуждении колебаний первой пластины за счет ее упругой связи с другими пластинами и корпусом.
Целью изобретения является повышение точности измерения угловой скорости и линейного ускорения.
Цель достигается в преобразователе инерциальной первичной информации, содержащем корпус, первую пластину из монокристаллического материала с первым и вторым вибраторами, каждый из которых выполнен в виде язычка с параллельными плоскости пластины основными поверхностями, отделенного по трем сторонам от пластины и другого язычка и соединенного четвертой стороной с пластиной упругой перемычкой, обеспечивающей свободу углового перемещения вибратора по двум взаимно перпендикулярным осям, вторую и третью пластины, заключающие между собой первую пластину, систему возбуждения колебаний вибраторов с элементами силовых преобразователей на вибраторах, второй и третьей пластинах, преобразователи положения каждой основной поверхности каждого вибратора с их элементами на вибраторах, второй и третьей пластинах, первое, второе и третье устройства вычитания, первый и второй сумматоры, вычислительное устройство, причем с входами первого сумматора соединены выходы преобразователей положения, к прямому входу первого устройства вычитания подключен выход преобразователя положения основной поверхности первого вибратора, расположенной напротив второй пластины, к инверсному входу первого устройства вычитания выход преобразователя положения основной поверхности первого вибратора, расположенной напротив третьей пластины, к прямому входу второго устройства вычитания подключен выход преобразователя положения основной поверхности второго вибратора, расположенной напротив второй пластины, к инверсному входу второго устройства вычитания выход преобразователя положения основной поверхности второго вибратора, расположенной напротив третьей пластины, выходы первого и второго устройств вычитания подключены к входам второго сумматора, выход второго устройства вычитания подключен к прямому входу третьего устройства вычитания, выход первого устройства вычитания к инверсному входу третьего устройства вычитания, система возбуждения колебаний вибраторов содержит последовательно соединенные фазосдвигающую цепочку и усилитель, фазосдвигающая цепочка подключена к выходу первого сумматора, а усилитель к элементам силовых преобразователей на второй и третьей пластинах, тем, что на первой пластине образованы третий и четвертый вибраторы, основные поверхности которых расположены в одних плоскостях с основными поверхностями первого и второго вибраторов, третий вибратор расположен симметрично первому вибратору, четвертый вибратор симметрично второму вибратору, ось симметрии третьего и четвертого вибраторов первому и второму вибраторам расположена перпендикулярно оси симметрии каждого вибратора, проходящей по упругой перемычке и язычку, введены элементы дополнительных силовых преобразователей на третьем и четвертом вибраторах, второй и третьей пластинах, инвертор, подключенный входом к выходу усилителя системы возбуждения, а выходом к элементам дополнительных преобразователей на второй и третьей пластинах.
Вариант преобразователя инерциальной первичной информации предусматривает выполнение первой пластины из монокристаллического кремния, а второй и третьей пластин из силикатного стекла или монокристаллического кремния.
Усовершенствование преобразователя достигается прикреплением пластин к корпусу центральными частями поверхности второй или третьей пластин, или обеих пластин, находящейся на внешних поверхностях второй и третьей пластин в местах расположения оси симметрии третьего и четвертого вибраторов относительно первого и второго вибраторов.
В следующем варианте усовершенствования преобразователя инерциальной первичной информации центральная внешняя часть второй или третьей пластины, или второй и третьей пластин выполнена утолщенной по сравнению с их периферийной частью.
В последующем варианте выполнения преобразователя инерциальной первичной информации центральные части первой пластины или центральные внутренние части второй и третьей пластин, или центральные части первой пластины и центральные внутренние части второй и третьей пластин выполнены утолщенными по сравнению с их периферийными частями.
В модификации предыдущих двух вариантов преобразователя утолщенные центральные части первой, второй и третьей пластин выполнены единым элементом с пластинами из монокристаллического кремния путем анизотронного травления или в виде платиков из монокристаллического кремния, наложенных на пластины и соединенных с ними диффузионной сваркой.
В еще одном варианте преобразователя инерциальной первичной информации в него введены преобразователи положения каждой основной поверхности третьего и четвертого вибраторов с их элементами на третьем и четвертом вибраторах, второй и третьей пластинах, третий, четвертый и пятый сумматоры, четвертое, пятое и шестое устройства вычитания, причем выходы преобразователей положения третьего и четвертого вибраторов подключены к дополнительным входам первого сумматора, выход преобразователя положения основной поверхности третьего вибратора, расположенной напротив второй пластины, подключен к прямому входу четвертого устройства вычитания, выход преобразователя положения основной поверхности третьего вибратора, расположенной напротив третьей пластины, подключен к инверсному входу четвертого устройства вычитания, к прямому входу пятого устройства вычитания подключен выход преобразователя положения основной поверхности четвертого вибратора, расположенной напротив второй пластины, к инверсному входу пятого устройства выход преобразователя положения основной поверхности четвертого вибратора, расположенной напротив третьей пластины, выход пятого устройства вычитания соединен с прямым входом шестого устройства вычитания, выход четвертого устройства вычитания подключен к инверсному входу шестого устройства вычитания, выходы четвертого и пятого устройств вычитания соединены с двумя входами третьего сумматора, выходы второго и третьего сумматоров соединены с входами четвертого сумматора, выходы третьего и шестого устройств вычитания подключены к входам шестого сумматора, выходы первого, четвертого и пятого сумматоров подключены к входам вычислительного устройства. Путем образования на первой пластине третьего и четвертого вибраторов, основные поверхности которых расположены в одних плоскостях с основными поверхностями первого и второго вибраторов, расположение третьего вибратора симметрично первому вибратору, четвертого вибратора симметрично второму вибратору, причем ось этой симметрии расположена перпендикулярно проходящей по упругой перемычке и язычку оси симметрии каждого вибратора, введение элементов дополнительных силовых преобразователей на третьем и четвертом вибраторах, второй и третьей пластинах, инвертора, подключенного к выходу усилителя системы возбуждения, обеспечивается уравновешивание моментов, действующих на центральную часть первой пластины в месте расположения упругих перемычек.
В результате этого устраняются напряжения в центральной части первой пластины, коэффициент динамической восприимчивости вибраторов остается неизменным, вследствие чего устраняется погрешность измерения, вызванная изменением коэффициентов преобразования гироскопа и акселерометра, и повышается точность измерения угловой скорости и линейного ускорения.
При выполнении второй и третьей пластин из силикатного стекла или монокристаллического кремния достигаются однородные температурные деформации первой, второй и третьей пластин, чем обеспечиваются минимальные температурные изменения сигналов преобразователей положения основных поверхностей вибраторов, и в результате повышается точность измерения угловой скорости и линейного ускорения.
При креплении пластин к корпусу центральными частями поверхности второй или третьей пластин, или обеих пластин, находящихся на внешних поверхностях второй и третьей пластин в местах расположения оси симметрии третьего и четвертого вибраторов относительно первого и второго, обеспечиваются минимальные деформации первой, второй и третьей пластин, вызванные деформациями и напряжениями в корпусе, чем достигается стабильность сигналов преобразователей положения основных поверхностей вибраторов, и в результате чего повышается точность измерения угловой скорости и линейного ускорения.
Путем выполнения центральной внешней части второй или третьей пластины, или второй и третьей пластин утолщенной по сравнению с периферийной частью еще более уменьшаются создаваемые напряжениями и деформациями корпуса напряжения и деформации первой пластины, что стабилизирует сигнал преобразователей положения и повышает точность измерения угловой скорости и линейного ускорения.
При выполнении утолщенных центральных частей второй и третьей пластин единым элементом с пластинами из монокристаллического кремния путем анизотронного травления или в виде платиков из монокристаллического кремния, наложенных на пластины из силикатного стекла и соединенных с ними диффузионной сваркой, уменьшаются температурные деформации всех трех пластин, что приводит к уменьшению температурной погрешности сигналов преобразователей положения и повышает точность измерения угловой скорости и линейного ускорения.
Путем образования на первой пластине третьего и четвертого вибраторов симметрично первому и второму вибраторам по оси симметрии, перпендикулярной оси симметрии каждого вибратора, проходящей по упругой перемычке и язычку вибратора, введения элементов дополнительных силовых преобразователей на третьем и четвертом вибраторах, второй и третьей пластинах, инвертора, подключенного входом к выходу усилителя системы возбуждения, а выходом к элементам дополнительных силовых преобразователей на второй и третьей пластинах, введения преобразователей положения каждой основной поверхности третьего и четвертого вибраторов с их элементами на третьем и четвертом вибраторах, второй и третьей пластинах, третьего, четвертого и пятого сумматора, четвертого, пятого и шестого устройства вычитания, когда выходы преобразователей положения третьего и четвертого вибраторов подключены к дополнительным входам первого сумматора, выход преобразователя положения основной поверхности третьего вибратора, расположенной напротив второй пластины, подключен к прямому входу четвертого устройства вычитания, выход преобразователя положения основной поверхности третьего вибратора, расположенной напротив третьей пластины, подключен к инверсному входу четвертого устройства вычитания, к прямому входу пятого устройства вычитания подключен выход преобразователя положения основной поверхности четвертого вибратора, расположенной напротив второй пластины, к инверсному входу пятого устройства вычитания выход преобразователя положения основной поверхности четвертого вибратора, расположенной напротив третьей пластины, выход пятого устройства вычитания соединен с прямым входом шестого устройства вычитания, выход четвертого устройства вычитания подключен к инверсному входу шестого устройства вычитания, выходы четвертого и пятого устройств вычитания соединены с двумя входами третьего сумматора, выходы второго и третьего сумматоров соединены с входами четвертого сумматора, выходы третьего и шестого устройств вычитания подключены к входам пятого сумматора, достигается компенсация составляющих сигналов преобразователей положения основных поверхностей первого и второго вибраторов, обусловленных температурными деформациями, перекрестными связями, составляющими противоположных знаков сигналов преобразователей положения основных поверхностей третьего и четвертого вибраторов.
В результате уменьшаются температурные погрешности, погрешности от перекрестных связей при измерении угловой скорости и ускорения, что повышает точность измерения угловой скорости и ускорения.
Путем выполнения третьего и четвертого вибраторов, расположенных симметрично относительно первого и второго вибраторов, подключения выходов преобразователей положения обоих основных поверхностей всех вибраторов к входам первого сумматора достигается компенсация погрешности измерения угловой скорости от изменений резонансных частот колебаний вибраторов, вызванных изменением ориентации продольных осей вибраторов относительно вектора ускорения свободного падения, в результате чего повышается стабильность коэффициента динамической восприимчивости колебательных систем вибраторов и коэффициента преобразования гироскопа, повышается точность измерения угловой скорости.
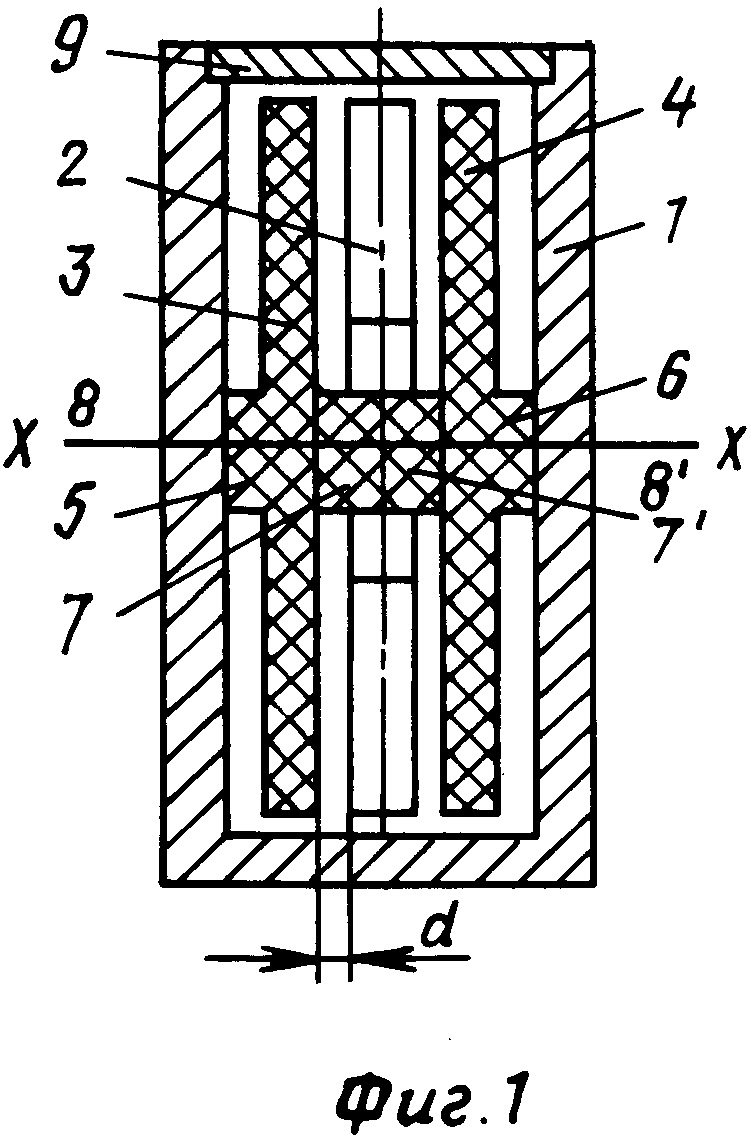
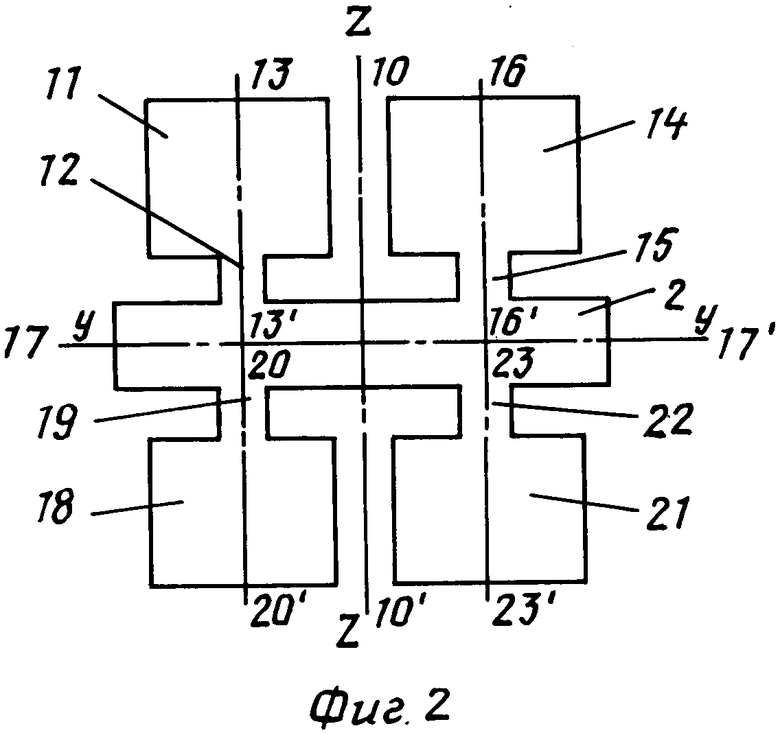
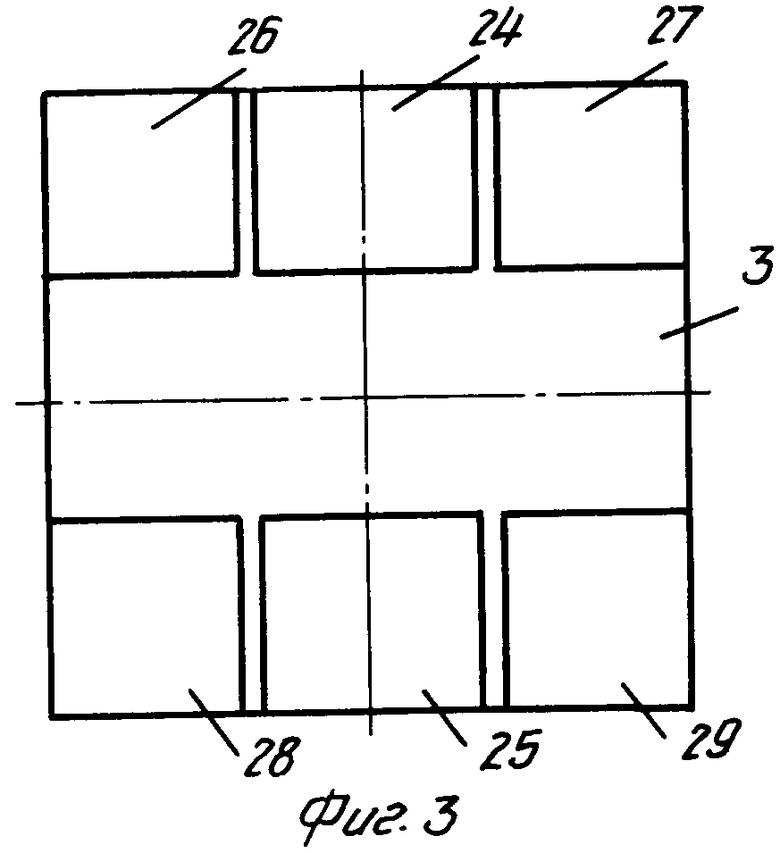
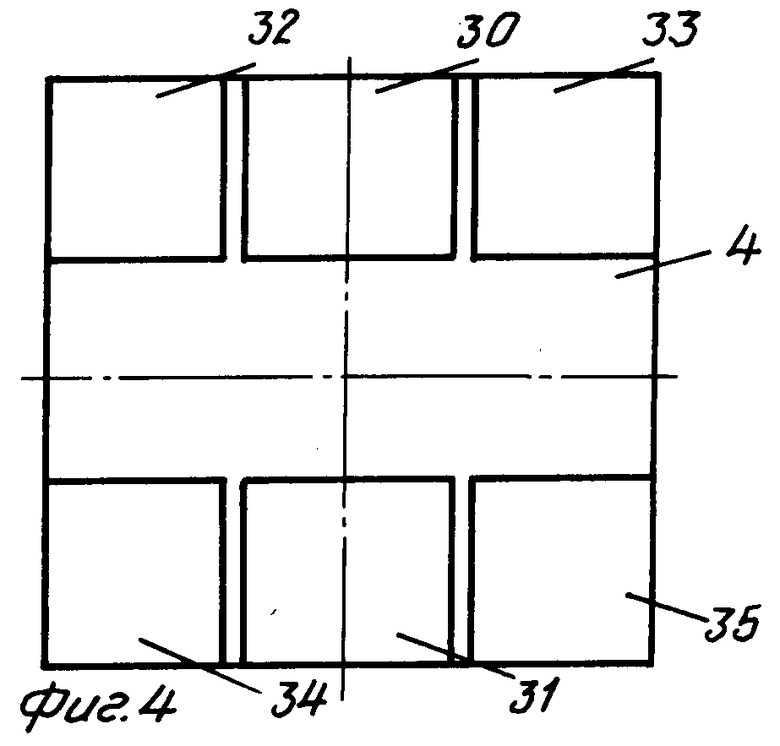
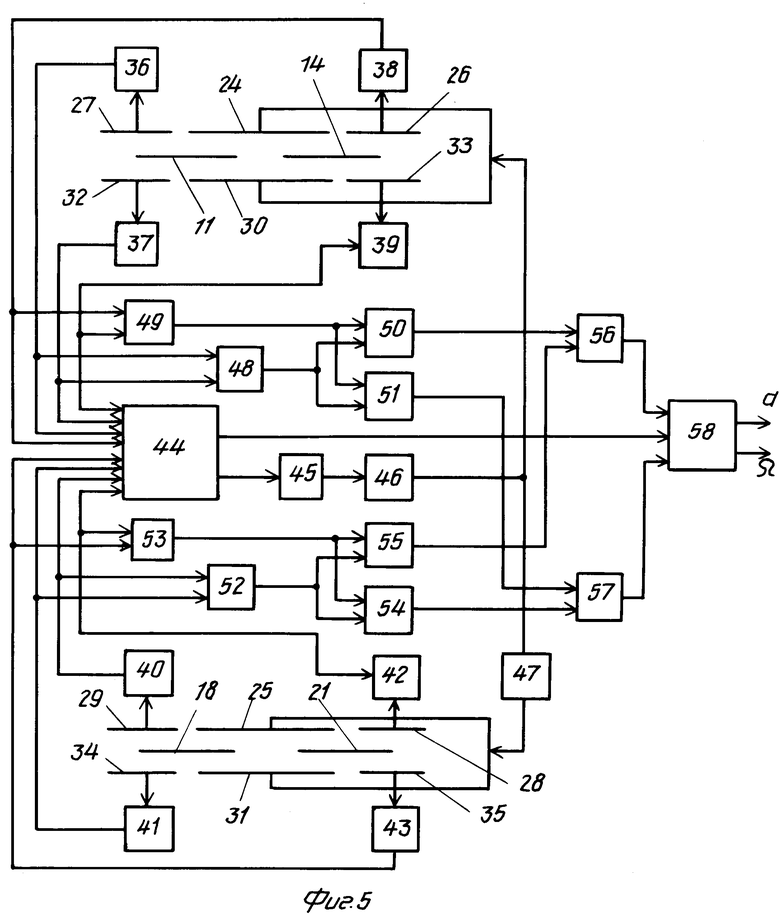
На фиг.1 представлена конструкция преобразователя инерциальной первичной информации; на фиг.2 изображена первая пластина; на фиг.3, 4 соответственно вторая и третья пластины; на фиг.5 дана структурная схема преобразователя инерциальной первичной информации.
В корпусе 1 установлена первая пластина 2, заключенная между второй 3 и третьей 4 пластинами. Внешняя центральная часть 5 второй пластины 3 и внешняя центральная часть 6 третьей пластины 4 выполнены утолщенными по сравнению с их периферийными частями и служат для крепления всех трех пластин к корпусу 1. Крепление к корпусу 1 пластин может производиться с помощью поверхностей или внешней центральной части 5 второй пластины 3, или внешней центральной части 6 третьей пластины 4, или с помощью обеих внешних центральных частей 5, 6 второй 3 и третьей 4 пластин.
Центральная часть 7 между второй пластиной 3 и первой пластиной 2, центральная часть 7' между третьей пластиной 4 и первой пластиной 2 служат для установки первой пластины 2 между второй пластиной 3 и третьей пластиной 4 на расстоянии d, которое составляет не менее максимального суммарного хода первой пластины 2 при наличии угловой скорости и линейного ускорения. Центральные части 7, 7' могут быть выполнены либо в виде утолщенных центральных частей первой пластины 2, либо в виде утолщенных центральных внутренних частей второй 3 и третьей 4 пластин, либо в виде платиков, накладываемых на первую 2, вторую 3 и третью 4 пластины, либо в виде утолщенных центральных частей первой пластины 2 и центральных внутренних частей второй пластины 3 и третьей пластины 4.
При выполнении первой пластины 2, второй пластины 3 и третьей пластины 4 из монокристаллического кремния утолщенная внешняя центральная часть 5, утолщенная внутренняя центральная часть 7 второй пластины 3 выполнены единым элементом методом анизотронного травления. Аналогично единым элементом методом анизотронного травления выполнены первая пластина 2 с утолщенными центральными частями 7, 7', третья пластина 4 с утолщенными внешней центральной частью 6 и внутренней центральной частью 7'.
Внешние центральные части 5, 6, внутренние центральные части 7, 7' могут быть образованы также в виде платиков из монокристаллического кремния, накладываемых на поверхности центральных частей первой пластины 2, второй пластины 3, третьей пластины 4 и соединенных с ними диффузионной сваркой, как при выполнении пластин из монокристаллического кремния, так и из силикатного стекла.
По боковой оси 8-8' симметрии первой 2, второй 3 и третьей 4 пластин направлена измерительная ось х-х акселерометра, образованного в преобразователе инерциальной первичной информации.
Преобразователь инерциальной первичной информации вакуумирован, загерметизирован и закрыт крышкой 9.
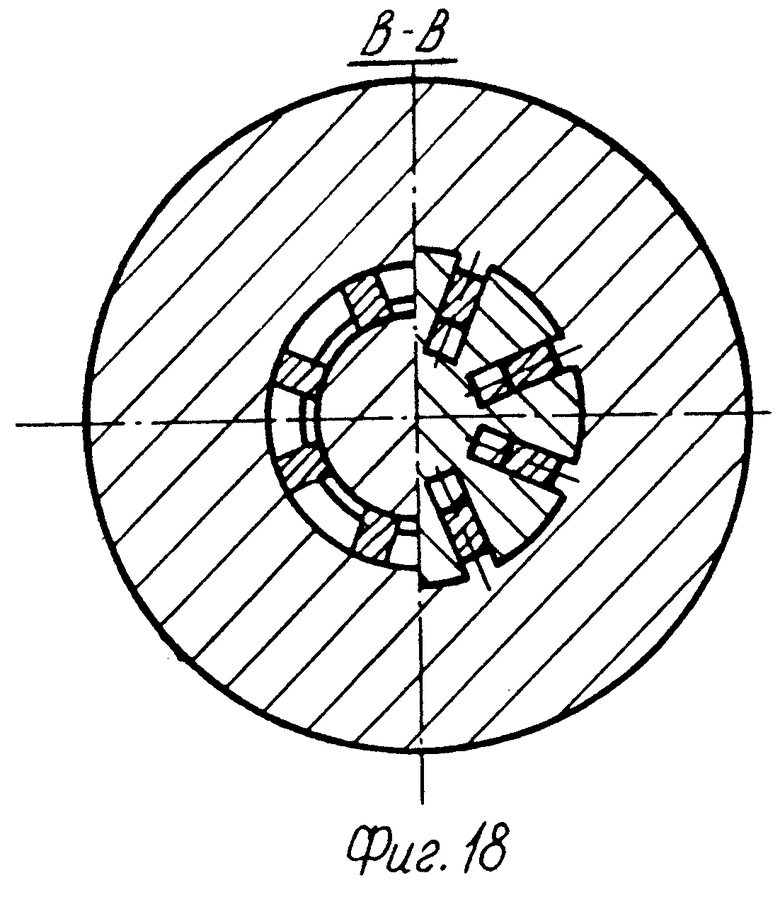
По одну сторону от продольной оси симметрии 10-10' первой пластины 2 расположен первый вибратор, состоящий из язычка 11 и упругой перемычки 12 с проходящей через язычок 11 и перемычку 12 осью симметрии 13-13' первого вибратора (фиг.2).
По другую сторону от оси 10-10' расположен второй вибратор с язычком 14 и упругой перемычкой 15 и осью симметрии 16-16' второго вибратора, проходящей по язычку 14 и перемычке 15.
Поперечная ось симметрии 17-17' первой пластины 2 проходит по ее центральной части перпендикулярно осям симметрии 13-13' и 16-16' первого и второго вибраторов.
Симметрично первому вибратору относительно оси 17-17' расположен третий вибратор с язычком 18, упругой перемычкой 19 и осью симметрии 20-20'. Симметрично второму вибратору относительно оси 17-17' образован четвертый вибратор с язычком 21, упругой перемычкой 22 и проходящей через них осью симметрии 23-23'.
Язычки 11, 16, 18, 21 отсоединены по трем сторонам от первой пластины 2 и друг от друга и соединены четвертой стороной с первой пластиной 2 каждый соответствующей упругой перемычкой из числа 12, 15, 19, 22.
Основные (наибольшие) поверхности язычков 11, 16, 18, 21 параллельны плоскостям первой пластины 2.
Ось у-у, совпадающая с осью симметрии 17-17' первой пластины 2, является осью процессии гироскопа. Совпадающая с осью 10-10' ось z-z является измерительной осью гироскопа.
Упругие перемычки 12, 15, 19, 22 обеспечивают угловые движения язычков 11, 14, 18, 21 относительно двух взаимно перпендикулярных осей изгиба перемычек, параллельных осям у-у и х-х.
Размеры перемычек 12, 15, 19, 22 по осям у-у и х-х, моменты инерции язычков 11, 14, 18, 21 относительно каждой из двух взаимно перпендикулярных осей изгиба перемычек таковы, что резонансные частоты угловых движений вибраторов относительно каждой из осей изгиба равны.
Выполнение элементов силовых преобразователей и преобразователей положения показано на примере выполнения первой пластины 2 из монокристаллического кремния, второй пластины 3 и третьей пластины 4 из силикатного стекла, силовых преобразователей в виде электростатических преобразователей, преобразователей положения с использованием емкостных преобразователей. Тогда функцию подвижных электродов электростатических силовых преобразователей и емкостных преобразователей выполняют электропроводные основные поверхности первой пластины 2 из монокристаллического кремния.
На поверхности второй пластины 3, расположенной напротив первой основной поверхности первой пластины 2, образованы первые неподвижные электроды 24, 25 первого и второго силового преобразователей (фиг.3). Неподвижные электроды 26-29 емкостных преобразователей положения первых основных поверхностей первого, второго, третьего и четвертого вибраторов расположены соответственно напротив одних основных поверхностей язычков 11, 14, 18, 21 первой пластины 2.
На расположенной напротив второй основной поверхности первой пластины 2 образованы вторые неподвижные электроды 30, 31 первого и второго силового преобразователя (фиг.4). Емкостные преобразователи положения вторых основных поверхностей первого, второго, третьего и четвертого вибраторов образованы соответственно неподвижными электродами 32-35, расположенными напротив других основных поверхностей язычков 11, 14, 18, 21 первой пластины 2.
Неподвижные электроды 24, 25, 30, 31 расположены напротив соответственно язычков 11, 14, 18, 21, но не покрывают полностью их поверхности. Неподвижные электроды 26-29, 32-35 покрывают оставшуюся часть соответственно каждого язычка 11, 14, 18, 21.
Неподвижные электроды 24-35 на второй пластине 3 и третьей пластине 4 в случае их выполнения из силикатного стекла образуются напылением слоя электропроводного материала, например, алюминия. На пластинах из монокристаллического кремния неподвижные электроды образуются путем создания оксидной пленки на поверхностях пластин, не занятых электродами.
Преобразователь 36 положения обращенной к второй пластине 3 основной поверхности первого вибратора соединен с неподвижным электродом 27 емкостного преобразователя положения (фиг. 5). С неподвижным электродом 32 емкостного преобразователя положения основной поверхности первого вибратора, расположенной напротив третьей пластины 4, соединен преобразователь 37 положения. К неподвижному электроду 26 подключен преобразователь 38 положения основной поверхности второго вибратора, находящейся напротив второй пластины 3. Преобразователь 39 положения обращенной к третьей пластине 4 основной поверхности второго вибратора подсоединен к неподвижному электроду 33. Неподвижный электрод 29 соединен с преобразователем 40 положения основной поверхности третьего вибратора, находящейся против второй пластины 3. К неподвижному электроду 34 подсоединен преобразователь 41 положения расположенной напротив третьей пластины 4 основной поверхности третьего вибратора. Преобразователь 42 положения основной поверхности четвертого вибратора, находящейся против второй пластины 3, соединен с неподвижным электродом 28, преобразователь 43 положения обращенной к третьей пластине 4 основной поверхности четвертого вибратора подключен к неподвижному электроду 35.
Преобразователи 36-43 положения могут быть выполнены в виде усилителей, к входам которых подключены емкостные преобразователи положения с подвижными электродами в виде язычков 11, 14, 18, 21 и неподвижными электродами 26, 27, 32, 33, 28, 29, 34, 35, запитываемые от источника напряжения постоянного тока.
Выходы преобразователей положения 36-43 подключены к входам первого сумматора 44, к выходу которого подключена система возбуждения колебаний вибраторов, содержащая последовательно соединенные фазосдвигающую цепочку 45 и усилитель 46. К выходу усилителя 46 подключены неподвижные электроды 24, 30 электростатических преобразователей соответственно на второй пластине 3 и третьей пластине 4, инвертор 47, с которым соединены неподвижные электроды 25, 31 электростатических преобразователей на второй 3 и третьей 4 пластинах. Фазосдвигающая цепочка 45 выполнена на обеспечение фазового сдвига 90о между выходным и входным сигналами.
Выход преобразователя 36 положения основной поверхности первого вибратора подключен к прямому входу первого устройства вычитания 48, к инверсному входу которого подключен выход преобразователя 37 положения противоположной основной поверхности первого вибратора. К прямому входу второго устройства 49 вычитания подсоединен выход преобразователя 38 основной поверхности второго вибратора, к инверсному входу выход преобразователя 39 противоположной основной поверхности второго вибратора.
Выходы первого устройства вычитания 48 и второго устройства 49 вычитания подключены к входам второго сумматора 50. Выход второго устройства вычитания 49 подключен к прямому входу третьего устройства вычитания 51, к инверсному входу которого подключен выход первого устройства 48 вычитания.
К прямому входу четвертого устройства вычитания 52 подключен выход преобразователя 40 положения основной поверхности третьего вибратора, к инверсному входу выход преобразователя 41 положения противоположной основной поверхности третьего вибратора. Выход преобразователя 42 положения основной поверхности четвертого вибратора соединен с прямым входом пятого устройства вычитания 53, а к его инверсному входу подключен выход преобразователя 43 положения противоположной основной поверхности четвертого вибратора. Выход пятого устройства вычитания 53 соединен с прямым входом шестого устройства вычитания 54 и с одним из входов третьего сумматора 55, выход четвертого устройства вычитания 52 подключен к инверсному входу шестого устройства вычитания 54 и к второму входу третьего сумматора 55. Выходы второго сумматора 50 и третьего сумматоров 55 соединены с входами четвертого сумматора 56. К входам пятого сумматора 57 подключены выходы третьего 51 и шестого 54 устройств вычитания. Выходы первого сумматора 44, четвертого сумматора 56 и пятого сумматора 57 соединены с входами вычислительного устройства 58, выходами которого являются сигналы угловой скорости Ω и линейного ускорения а.
Преобразователь инерциальной первичной информации работает следующим образом. При включении питания преобразователя инерциальной первичной информации в нем возбуждается колебание на резонансной частоте вибраторов язычков 11, 14, 18, 21 относительно оси изгиба упругих перемычек 12, 15, 19, 22, параллельной оси х-х. Это происходит потому, что при подаче напряжения на неподвижные электроды 24, 30 возникает электростатическая сила, втягивающая язычки 11, 14 в промежуток между электродами 24, 30. При снятии напряжения с электродов 24, 30 язычки 11, 14 возвращаются в исходное положение и переходят его вследствие инерции. При этом изменяются емкости конденсаторов, образованных неподвижными электродами 26, 27, 32, 33 и электропроводными поверхностями язычков 11, 14. Изменения емкостей преобразуются в электрический сигнал в преобразователях 36-39 положения. После суммирования сигналов преобразователей в первом сумматоре 44 сигнал поступает на вход фазосдвигающей цепочки 45, где он сдвигается по фазе на 90о. После усиления в усилителе 46 сигнал поступает на неподвижные электроды 24, 30, вызывая угловое перемещение язычков 11, 14. Таким образом возникает незатухающее колебательное движение вибраторов относительно осей изгиба упругих перемычек, параллельных оси х-х. Вследствие создаваемого фазосдвигающей цепочкой 45 фазового сдвига в 90о эти угловые колебания происходят на резонансной частоте упругих перемычек 12, 15.
Одновременно сигнал с выхода усилителя 46 поступает в инвертор 47, откуда он, преобразованный по фазе на 180о, подается на неподвижные электроды 25, 31, заставляя язычки 18, 21 совершать колебательное движение относительно осей изгиба упругих перемычек 19, 22, параллельных оси х-х, в противофазе с колебательным движением язычков 11, 14.
Так как происходит колебательное движение язычков 11, 16, 18, 21, то напряжения от источника питания постоянного тока на образованных электродами 26-29, 32-35 и электропроводными поверхностями язычков 11, 14, 18, 21 конденсаторах преобразуются в переменные напряжения, которые после преобразователей 36. 43 положения основных поверхностей первого, второго, третьего и четвертого вибраторов поступают на входы первого сумматора 44. В результате суммирования переменных напряжений, отличающихся от номинального напряжения вследствие изменения коэффициента динамической восприимчивости из-за различной ориентации продольных осей вибраторов относительно вектора ускорения свободного падения, на выходе первого сумматора 44 получается переменное напряжение, близкое к кратному в соответствии с числом преобразователей положения номинальному напряжению. Сдвинутое по фазе на 90о в фазосдвигающей цепочке 45 суммарное напряжение после усиления в усилителе 46 поступает в этой фазе на неподвижные электроды 24, 30 силовых преобразователей системы возбуждения колебаний и в противоположной фазе после прохождения через инвертор 47 на неподвижные электроды 25, 31. Так как напряжение на неподвижных электродах 24, 25, 30, 31 близко к кратному номинальному напряжению, сдвинуто по фазе на 90о, то происходит колебательное движение язычков 11, 14, 18, 21 первого, второго, третьего и четвертого вибраторов в направлении оси у-у с резонансной частотой, независящей от ориентации продольных осей вибраторов относительно вектора ускорения свободного падения. Вследствие того, что напряжение на электродах 25, 31 противофазно напряжению на электродах 24, 30, направление колебательного движения третьего и четвертого вибраторов противоположно направлению колебательного движения первого и второго вибраторов, причем язычок 14 перемещается в противоположном направлении относительно язычка 11, язычок 21 в противоположном направлении относительно язычка 18.
При наличии угловой скорости, вектор которой направлен по измерительной оси z-z, под действием кориоллисова ускорения язычки 11, 14, 18, 21 вибраторов приобретают колебательное движение в направлении оси х-х относительно осей изгиба упругих перемычек 12, 15, 19, 22, параллельных оси у-у. Так направление движения язычков 18, 21 в направлении оси у-у противоположно направлению движения язычков 11, 14, то противоположно и направление движения в направлении оси х-х язычков 18, 21 по сравнению с направлением движения язычков 11, 14. При этом язычок 14 перемещается в противоположном направлении по сравнению с язычком 11, язычок 21 в противоположном направлении по сравнению с язычком 18.
При наличии ускорения по измерительной оси х-х акселерометра под действием инерционной силы происходит угловое перемещение в одну сторону язычков 11, 14, 18, 21 в направлении оси х-х относительно осей изгиба упругих перемычек 12, 15, 19, 22, параллельных оси у-у.
Выражения для выходных сигналов U1-U8 преобразователей 36-43 положения основных поверхностей вибраторов в фиксированный момент времени при таком направлении ускорения а, когда язычки 11, 14 приближаются к неподвижным электродам 27, 26 соответственно, язычки 18, 21 к неподвижным электродам 29, 28, при направлении вектора угловой скорости, когда язычки 11, 14, 18, 21 приближаются соответственно к неподвижным электродам 32, 26, 29, 35, когда направление проекции вектора бокового ускорения аб на измерительную ось х-х совпадает с направлением измеряемого ускорения, вектор боковой угловой скорости Ω направлен по оси х-х, температурная деформация вызывает сближение язычков 11, 26 с неподвижными электродами 27, 26, язычков 18, 21 с неподвижными электродами 34, 35:
U1=Uo+K1(a+k1aб)+(- Ω +k2Ω )+K3 ΔT (1)
U2=Uo+K1(-a-k1aб)+K2(Ω -k2 Ωб)-K3Δ T (2)
U3=Uo+K1(a+k1aб)+K2( Ω +k2Ω б)+K3 ΔT (3)
U4=Uo+K1(-a-k1aб)+K2(-Ω -k2 Ωб)-K3 ΔT (4)
U5=Uo+K1(a-k1aб)+K2(Ω -k2 Ωб)-K3 ΔT (5)
U6=Uo+K1(-a+k1aб)+K2(- Ω +k2Ω б)+K3 ΔT (6)
U7=Uo+K1(a-k1aб)+K2(-Ω -k2 Ωб)-K3 ΔT (7)
U8= Uo+K1(-a+k1aб)+K2(Ω +k2Ω б)+K3 ΔT (8) где Uo номинальное значение напряжения;
K1 коэффициент преобразования акселерометра;
K2 коэффициент преобразования преобразователя угловой скорости;
K3 коэффициент температурной чувствительности;
k1 коэффициент поперечной чувствительности по ускорению;
k2 коэффициент поперечной чувствительности по угловой скорости;
ΔТ температурное изменение.
В результате преобразования в первом устройстве вычитания 48 сигналов преобразователей 36, 37 положения получается сигнал Δ U1.
Δ U1=2[K1(a+k1aб)+K2(-Ω +k2 Ωб)+K3 ΔT] (9)
Сигнал Δ U2 на выходе второго устройства вычитания 49 в результате вычитания сигналов преобразователей 38, 39 положения:
Δ U2=2[K1(a+k1aб)+K2(Ω +k2 Ωб)+K3 ΔT] (10)
В четвертом устройстве вычитания 52 сигналы преобразователей 40, 41 положения преобразуются в разность напряжений ΔU3:
Δ U3=2[K1(a-k1aб)+K2(Ω -k2 Ωб)-K3 ΔT] (11)
Сигнал Δ U4 на выходе пятого устройства вычитания 53, как разность напряжений преобразователей 42, 43 положения:
ΔU4=2[K1(a-k1aб)+K2(-Ω -k2 Ωб)-K3 ΔT] (12)
Суммирование сигналов Δ U1 и Δ U2 первого 48 и второго устройства вычитания 49 во втором сумматоре 50 дает сигнал Δ U5:
ΔU5=4[K1(a+k1aб)+K3 ΔT] (13)
На выходе третьего сумматора 55 получается сигнал Δ U6 суммы сигналов четвертого 52 и пятого 53 устройств вычитания:
Δ U6=4[K1(a-k1aб)-K3 ΔT] (14)
Путем суммирования в четвертом сумматоре 56 напряжений Δ U5 и Δ U6второго 50 и третьего 55 сумматоров получается сигнал Δ U7, пропорциональный измеряемому ускорению и не зависящий от бокового ускорения и температурной деформации элементов преобразователя инерциальной первичной информации:
Δ U7=8K1a (15)
После вычитания из сигнала Δ U2 на выходе второго устройства вычитания 49 сигнала Δ U1 на выходе первого устройства вычитания 48 в третьем устройстве вычитания 51 получается сигнал Δ U8:
ΔU8=4K2 Ω (16)
Сигнал Δ U9 на выходе шестого устройства вычитания 54 получается как разность между сигналами Δ U3 и Δ U4 на выходах пятого 53 и четвертого 52 устройств вычитания:
Δ U9=4K2 Ω (17)
При суммировании в пятом сумматоре 57 сигналов Δ U8 и Δ U9 третьего 51 и шестого 54 устройств вычитания на его выходе получается сигнал Δ U10, пропорциональный измеряемой угловой скорости и не зависящий от боковой угловой скорости и температурных деформаций:
ΔU10=8K2 Ω (18)
На выходе первого сумматора 44 получается сигнал Δ U11, равный сумме напряжений U1-U8 преобразователей 36-43 положения основных поверхностей вибраторов:
Δ U11=8Uo (19)
На входы вычислительного устройства 58 поступают сигналы Δ U11 с выхода первого сумматора, Δ U7 о величине измеряемого ускорения с выхода четвертого сумматора 56, Δ U10 о величине измеряемой угловой скорости с выхода пятого сумматора 57. В вычислительном устройстве 58 производится деление значений сигналов Δ U7 и ΔU10 на значение сигнала Δ U11 и с его выхода получаются сигналы измеряемого ускорения а и угловой скорости Ω не зависящие от перекрестных связей по линейному ускорению и угловой скорости и от температурных деформаций пластин преобразователя инерциальной первичной информации.
Таким образом, преобразователь инерциальной первичной информации осуществляет измерение линейного ускорения и угловой скорости, устраняя погрешности от перекрестных связей и температурную погрешность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2184380C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
Использование: измерительная техника, а именно преобразователи угловой скорости и линейного ускорения. Сущность изобретения: в преобразователе инерциальной первичной информации, содержащем корпус, первую пластину с двумя вибраторами, содержащими язычок и упругую перемычку, обеспечивающую свободу углового перемещения вибратора по двум взаимно перпендикулярным осям, вторую и третью пластины, систему возбуждения колебаний вибраторов с силовыми преобразователями преобразователи положения вибраторов, три устройства вычитания, два сумматора, причем система возбуждения колебаний содержит фазосдвигающую цепочку и усилитель, на первой пластине образованы третий и четвертый вибраторы. В устройство введены силовые преобразователи третьего и четвертого вибраторов, инвертор, подключенный выходом к усилителю, а входом к силовым преобразователям третьего и четвертого вибраторов. 6 з. п. ф-лы, 5 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4750364, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
